刀库换刀流程和逻辑思路图文稿
刀库换刀流程和逻辑思
路
文件管理序列号:[K8UY-K9IO69-O6M243-OL889-F88688]
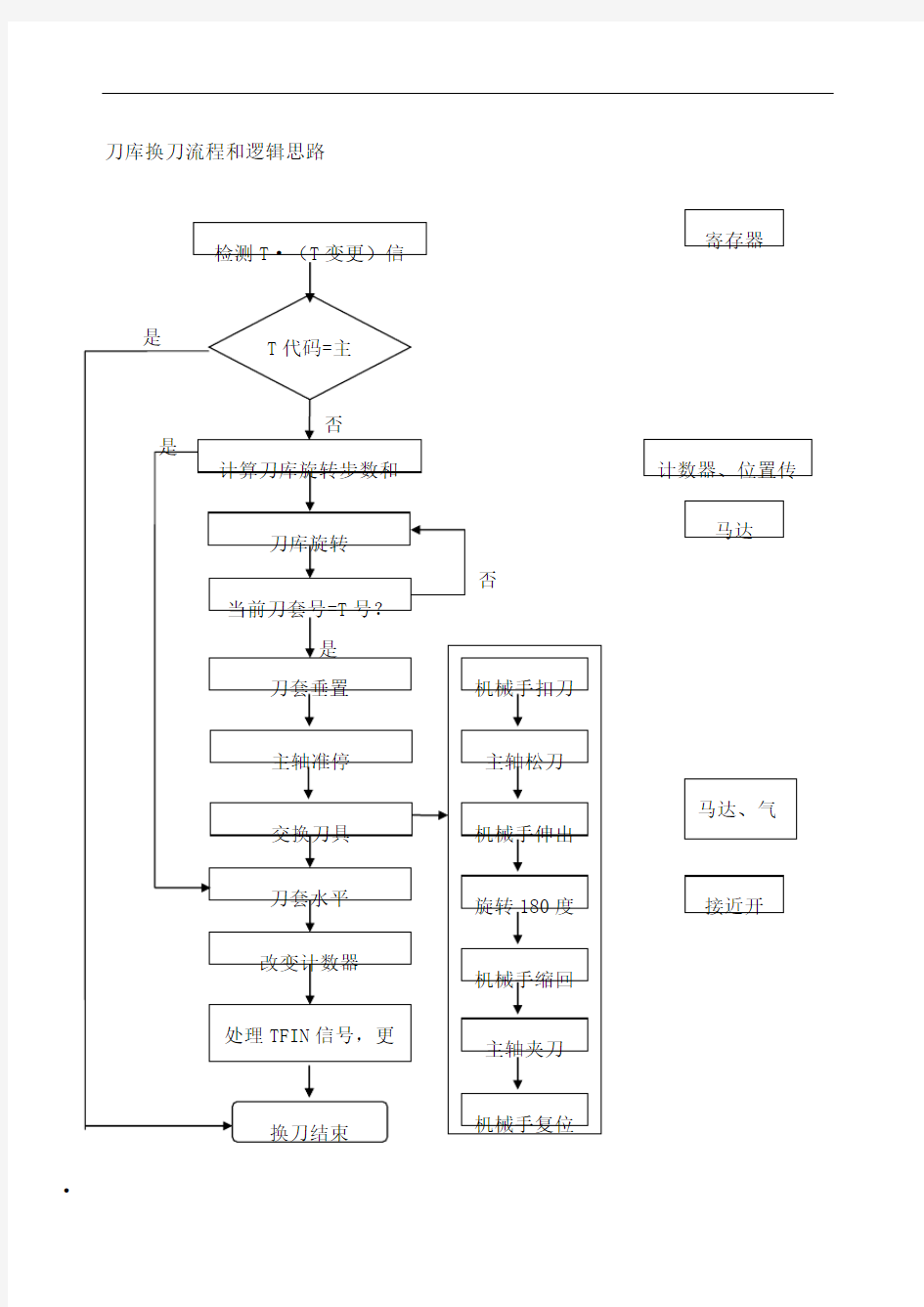
刀库换刀流程和逻辑思路
·
乱刀式刀库的换刀流程图
定:1
找刀)
①取刀
②还刀
③换刀
KM2主触点、三相异步交流电机M等组成。控制电路中中间继电器KA1与KA2分别控制接触器KM1
和KM2的线圈,控制刀库电机M的正反转和停机制动。实现刀具的选择从而达到精确选刀的目的。
电动刀库电气控制线路图
四、固定式刀库自动换刀装置的PMC控制
PMC控制包括硬件控制和软件控制两方面。
硬件控制包括输入信号的接入和输出信号的控制。下图所示为电动刀库PMC 接线图。在此例应用中,传感器信号分别接在X2.0、X2.1输入端口,而控制正反转接触器KM1、KM2的中间继电器的线圈分别由Y50.1、Y50.2控制。
电动刀库PMC接线图
图6 刀库旋转逻辑梯形图
例如,加工中心在执行M06T1换刀指刀令时的换刀结果是:刀库中的T1刀装放轴。
(1)D SCH功能指令(检索功能)
当CNC读到T1指令代码信号时,将此信号信息送入PMC。当PMC接到寻找新刀具的指令T1后(FT3为“1”)在模拟刀库的刀号数据表中开始T代码数据检索出来存入F26地址单元中。然后将1号刀所在数据表中的序号1存入到检索结果输出地址D100中,同时R10.2为“1”。由于R9091.0为“0”。即断开,所以DSCH功能指令按规定2位BCD码处理数据。
(2)C OIN功能指令(比较指令)
当R10.2为“1”时,地址D100的内容(指令1号)和地址D200(当前刀套数据表序号4)的内容作比较。数据一致时,输出R10.3为“1”,不一致时,
R10.3为“0”作为刀库旋转达ROT功能指令的条件。
(3)R OT功能指令(旋转指令)
ROT功能指令中,旋转检索数(刀套位置个数)为12,现在位置地址为D200(存放当前刀套号4),目标位置地址为D100(存放T1号刀具的刀套号1),计算结果输出地址为C1。
当刀具判别指令R10.3为“0”,ROT指令开始执行根据ROT控制条件设定,计算出刀库现在的位置与目标相差的步数为“3”步将此数据存入C1中,并选择出最短旋转路径,使R10.4置“0”,正向旋转方向输出。通过Y50.1正向旋转继电器,驱动刀库正向旋转“3”步,即找到了1号刀位。
(4)CTR功能指令(计数指令)
CTR功能指令中,计数指令01号计数,地址C1为刀库现在的位置目标位置相差的步数的数据存储地址。R10.4控制计数器的加计数或计数器的减计数,X2.1为0时计数器不计数,当X2.1为1时计数器计数累加。当计数器累加到定值
R10.5输出。
刀库旋转后,R10.3输出为“1”时(刀库的实际位置与刀库目标位置一致),即识虽了所要寻找的新刀具,刀库停转并定位,等待换刀。