第3章 单点信号控制(借鉴教学)
《自动控制原理》课件第三章

h(t) 1
ent sin(
1 2
1 2nt arccos ) 1
1
1
2
e t
sin(dt
)
(3-13)
2) 无阻尼(ζ=0)二阶系统的单位阶跃响应
系统有两个共轭纯虚根s1=jωn,s2=-jωn 由式(3-10)可知系统的单位阶跃响应为
h(t)=1-cosωnt
(3-14)
这是一条平均值为1的正弦或余弦形式的等幅振荡,其振荡
2. 动态性能与稳态性能 稳定是控制系统能够运行的首要条件,因此只有当动态 过程收敛时,研究系统的动态性能才有意义。 1) 动态性能 通常在阶跃函数作用下,测定或计算系统的动态性能。 一般认为,阶跃输入对系统来说是最严峻的工作状态。如果 系统在阶跃函数作用下的动态性能满足要求,那么系统在其 他形式函数的作用下,其动态性能也是令人满意的。 描述稳定的系统在单位阶跃函数作用下,动态过程随时 间t的变化状况的指标称为动态性能指标。为了便于分析和 比较,假定系统在单位阶跃输入信号作用前处于静止状态, 而且输出量及其各阶导数均为零。
令
T1
n (
1
2
, 1)
T2
n (
1
2
1)
由式(3-12)可得此时二阶系统的单位阶跃响应为
h(t) 1 et T1 et T2 T2 T1 1 T1 T2 1
(3-15)
以上四种情况的单位阶跃响应曲线如图3-5所示,其横 坐标为无因次时间ωnt。由图3-5可见,在过阻尼和临界阻尼 响应曲线中,临界阻尼响应具有最短的上升时间,响应速度 最快; 在欠阻尼响应曲线中,阻尼比越小,超调量越大, 上升时间越短,通常取ζ=0.4~0.8为宜,此时超调量适度, 调节时间较短; 若二阶系统具有相同的ζ和不同的ωn,则其 振荡特性相同,但响应速度不同,ωn越大,响应速度越快。
单点交叉口信号控制
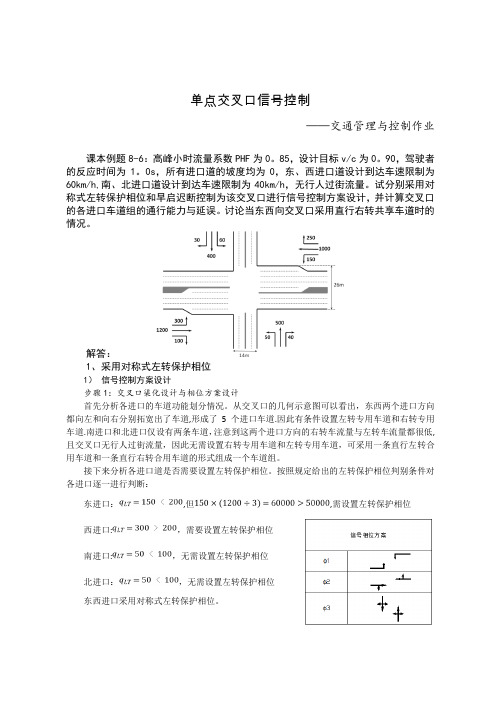
单点交叉口信号控制——交通管理与控制作业课本例题8-6:高峰小时流量系数PHF为0。
85,设计目标v/c为0。
90,驾驶者的反应时间为1。
0s,所有进口道的坡度均为0,东、西进口道设计到达车速限制为60km/h,南、北进口道设计到达车速限制为40km/h,无行人过街流量。
试分别采用对称式左转保护相位和早启迟断控制为该交叉口进行信号控制方案设计,并计算交叉口的各进口车道组的通行能力与延误。
讨论当东西向交叉口采用直行右转共享车道时的情况。
解答:1、采用对称式左转保护相位1)信号控制方案设计步骤1:交叉口渠化设计与相位方案设计首先分析各进口的车道功能划分情况。
从交叉口的几何示意图可以看出,东西两个进口方向都向左和向右分别拓宽出了车道,形成了5个进口车道.因此有条件设置左转专用车道和右转专用车道.南进口和北进口仅设有两条车道,注意到这两个进口方向的右转车流量与左转车流量都很低,且交叉口无行人过街流量,因此无需设置右转专用车道和左转专用车道,可采用一条直行左转合用车道和一条直行右转合用车道的形式组成一个车道组。
接下来分析各进口道是否需要设置左转保护相位。
按照规定给出的左转保护相位判别条件对各进口逐一进行判断:东进口:,但,需设置左转保护相位西进口:,需要设置左转保护相位南进口:,无需设置左转保护相位北进口:,无需设置左转保护相位东西进口采用对称式左转保护相位。
于是交叉口的相位设计方案初步确定为下:相位一:东西左转保护相位相位二:东西直行右转相位相位三:南北直行、左转和右转相位步骤2:各车道组直行当量计算查表可获得各进口道各转向车流的直行当量系数,计算得出各车道组的直行车流当量.进口方向转向流量直行当量系数直行当量车道组直行当量平均单车道直行当量东进口左转150 1。
05 158 158 158 直行1000 1。
00 1000 1000 334 右转250 1。
18 295 295 295西进口左转300 1。
单点控制

交通控制课程设计单点信号控制设计方法学院:能源与交通工程学院专业:交通工程姓名:李文平学号:111616875指导教师:李丽丽职称:讲师论文提交时间:二0一四年十一月摘要城市交通控制系统是提高城市交通运行效率的重要途径之一,也是城市交通现代化、智能化的重要标志。
本文以单点信号控制理论进行信号分配,其中以Webster的方法为基础,运用ARRB方法对以往的不符合现代交通的分配方式进行了改进,使其更加符合交通环境。
以信号配时参数优化作为研究内容进行深入细致的研究。
对周期时长、绿信比、最小绿灯时间、等主要配时参数的常用优化目标、优化方法及模型进行了对比分析。
表明基于Webster的ARRB法更加符合现在城市交通控制。
关键字:交通控制信号配时单点信号控制AbstractUrban traffic control system is one important way to improve the efficiency of urban transport, but also an important symbol of modern urban transport, intelligent. In this paper, the theory of single-point signal control signal distribution, which Webster's method is based on the use of the method of allocation ARRB conventional modern traffic does not meet improved to make it more in line with the traffic environment. When the signal timing parameters to optimize the content as a research intensive research. Long period of time, green ratio, the minimum green time when other major parameters used with optimization goals, optimization methods and models were compared. Show based on Webster's ARRB law more in line with current urban traffic control.Keywords: traffic control signals with single-point signal control目录第1章、绪论 (1)1.1.研究背景及意义 (1)1.1.1.研究背景 (1)1.1.2研究意义 (1)1.2交通控制的发展史 (2)1.3国内外研究现状 (3)1.3.1国外研究现状 (3)1.3.2国内研究现状 (4)第 2 章、单点信号控制基本理论 (4)2.1.单点信号控制基本参数 (4)2.2.交通流理论的基本参数 (5)2.3.参数间关系 (6)2.3.1.速度和密度的关系 (6)2.3.2.流量和速度的关系 (6)2.3.3.流量和速度的关系 (7)2.4交通信号控制效果评价指标 (7)2.4.1延误 (7)2.4.2 通行能力和饱和度 (7)2.4.3.排队长度 (7)2.5小结 (7)第三章、单点信号控制方法 (8)3.1、概述 (8)3.2信号配时设计 (8)3.2.1、最佳信号周期设计(基于TRRL法的ARRB法) (8)3.2.2、绿灯时间 (9)3.3、小结 (10)第四章、实例分析 (10)4.1、数据采集 (10)4.2、数据分析计算 (12)第五章、全文总结与展望 (14)第1章、绪论1.1.研究背景及意义1.1.1.研究背景近几年来,由于我国经济迅猛发展以及城市化进程快速推进,人们对交通的需求也越来越大,导致了交通需求与城市道路交通设施之间形成尖锐矛盾。
单点定时控制课件

单点定时控制
配时参数计算
• 绿间隔时间
• 信号总损失时间
• 信号周期时长
• 总有效绿• 灯We时bs间ter算法 (最佳周期)
• 各相位的• 有Ak效ce绿li灯k算时法间
C0
1.5L5 1Y
L: 信号总损失时间 Y: 各相位关键车流流量比之和
单点定时控制
Akcelik公式 (多指标)
C0
(1.4k)L6 1Y
➢ k=0.4时,油耗最小(fuel consumption) ➢ k=0.2时,消耗最小(cost,including the value of delay time) ➢ k=0时,延误最小 ➢ k=-0.3时,排队数最小
单点定时控制
定时信号配时方案的基本内容
•信号相位方案 •信号基本控制参数
单点定时控制
信号相位方案
• 确定信号相位方案,是对信号轮流给某 些方向的车辆或行人分配通行权顺序的 确定。
单点定时控制
信号相位方案
• 信号相位:信号交叉口每一种控制状态 (通行权),即对进口道不同方向所显示 的不同灯色的组合,称为一个信号相位。
信号基本控制参数
• 信号配时方案用信号配时图表达。
相位1 相位2
周期时长 C
绿灯间隔时间 (相位1到相位2)
绿灯间隔时间 (相位2到相位1)
绿灯时间 40 43
红灯时间
红灯时间 45
0
单点定时控制
绿灯时间 85
90
信号基本控制参数
• 周期时长是决定单点信号控制交通 效益的关键参数,是信号配时设计 的主要对象。 • 绿信比是一个信号相位的有效绿灯 时长与周期时长之比。
[工学]自动控制原理第3章
![[工学]自动控制原理第3章](https://img.taocdn.com/s3/m/d9a77406bf23482fb4daa58da0116c175f0e1e8a.png)
三、劳斯判据 系统特征方程的标准形式: ■ 系统稳定的必要条件: 特征方程所有系数均为正,则系统可能稳定,可 ■ 用劳斯判据判稳。 ■ 系统稳定的充分条件: 特征方程所有系数组成劳斯表,其第一列元素必须
为正。 ■ 列劳斯表:
26
例 四阶系统特征方程式: 试判别系统的稳定性,并说明特征根中具有正部根 的个数。 列劳斯表:
(1)用
代入特征方程;
(2)将z看作新坐标, 用劳斯判据再次判稳。
30
3.6 稳态误差分析及计算
一、误差及稳态误差概念定义
1.误差: (2种定义) 输入端定义 输出端定义 两者之间的关系
31
32
2.稳态误差: 稳定系统误差的终值。 3.稳态误差的计算公式: 终值定理 二、稳态误差计算 1.在给定输入信号作用下的分析: 令
28
四、劳斯判据的其它应用 1.分析系统参数对稳定性的影响 例 系统如图所示,求使系统稳定的K值的 范围。解 : 系统闭环特征方程为 列劳斯表
系统稳定必须满足 所以
29
2.确定系统的相对稳定性
稳定裕量: 系统离稳定的边界有多少余量。也就是实部最大的特 征根与虚轴的距离。
若要求系统有 的稳定裕量, 则
18
例 有一位置随动系统,结构图如下图所示,其中K=4 。 求该系统的自然振荡角频率和阻尼比; 求该系统的超调量和调节时间; 若要阻尼比等于0.707,应怎样改变系统 放大倍数K ?
解(1)系统的闭环传递函数为
写成标准形式
可知
19
(2)超调量和调节时间
(3)要求
时,
四、提高二阶系统动态性能的方法 1.比例——微分(PD)串联校 正
将其代入超调量公式得
, 叫 峰值时间。
单点交叉口信号控制补充内容课件

智能控制策略
• 总结词:智能控制策略是一种基于人工智能和机器学习的信号控制方法,通过 学习历史和实时交通流数据,优化信号灯的配时方案。
04 单点交叉口信号控制优化 方法
交通流量优化
总结词
通过调整信号灯配时,提高交叉口车辆通过效 率
01
总结词 优化交通流向,减少冲突点
03
总结词 实施交通分流,减轻交叉口压力
• 优点:定时控制策略简单易行,无需实时检测交通流情况,对于交通流量相对稳定、变化不大的交叉口具有一定的适用 性。
• 缺点:定时控制策略无法实时响应交通流的变化,可能导致交通拥堵和延误,特别是在交通流量较大或存在突发状况时。
自适应控制策略
• 总结词:自适应控制策略是一种基于实时交通流数据的信号控制方法,通过实 时检测交通流参数,调整信号灯的绿信比和相位时长。
优势与局限性 分析了单点交叉口信号控制技术的优点,如提高交通效率、 减少拥堵和排放等,同时也探讨了其存在的局限性,如对 车辆行驶轨迹和交通流量的依赖性。
适用场景与条件 讨论了单点交叉口信号控制在不同场景下的适用性,如城 市道路、高速公路和乡村道路等,并分析了其对道路条件、 交通流量和道路设计等方面的要求。
05
02
详细描述
根据不同时段的交通流量特点,动态调整信 号灯的配时,使得车辆在交叉口等待时间减 少,提高道路通行能力。
04
详细描述
通过合理设置左转、右转车道和行人 过街设施,减少不同流向车辆的冲突 点,降低交通事故风险。
06
详细描述
在高峰时段,通过实施交通分流方案,将部分 车流引导至周边道路,减轻单点交叉口的交通 压力。
通过案例分析,培养 学生的实际操作能力 和问题解决能力。
自动控制原理第三章ppt课件

.
1
第三章 线性系统的时域分析法
线性系统的时域分析法
引言 一阶系统时域分析 二阶系统时域分析 线性系统的稳定性分析 线性系统的稳态误差计算
.
3
自动控制系统好?差? 系统分析
典型的输入信号
时域分 析
复域分 单位析脉冲 频阶域跃分
斜析坡 正余弦
时域性能指标
稳态性能 指标
稳定性
动态性能 指标
2
0
1.8 0.4
0.1
1.6 0.5
0.2
1.4 0.6
0.3
1.2 0.7
1 0.8
0.8
0.6 0.4 0.2
0 0
0.9 1.0 1.5
246
阻尼比越小,超调量越大,上升时间越短。
2
nt
8 10 12
阻尼比取0.40.8时,超调 量适宜,调节
时间短
可以看出:随着 的增加,c(t)将从无衰减的周期运动变为有
能
指
标
稳态性能指标
1.动态性能指标
通常在阶跃函数作用下,测定或计算系统的动态性能。
一般认为,阶跃输入对系统来说是最严峻的工作状态。 如果系统在阶跃函数作用下的动态性能满足要求,那 么系统在其他形式的函数作用下,其动态性能也是令 人满意的。
描述稳定的系统在单位阶跃函数下,动态过程 随时间t的变化状况的指标,称为动态性能指标。
评价系统的阻尼程度。(稳)
稳定性能指标和抗干扰能力。越小, 系统精度越高。(准)
§3.3 典型一阶系统时域分析
一、典型一阶系统的数学模型 以一阶微分方程为运动方程的系 统 (s)C(s) 1 R(s) TS1
②
ui
第3章交通信号控制基础分解
第1章 绪论 第2章 交叉口优先规则控制 第3章 交通信号控制基础 第4章 单点信号控制 第5章 干线及区域信号控制 第6章 交通控制的评价指标 第7章 交通控制系统组成及原理 第8章 典型交通信号控制系统简介 第9章 高速公路交通控制 第10章 交通控制系统的建立
1
第3章 交通信号控制基础
29
相位1 相位2 相位3
C T1
G1
A1
R1 T2
G1
A1
R2
G2 A2
R2
T3
R3 C
G3 A3
R3
C
C = T1+ T2 + T3 =G1+A1+G2+A2+G3+A3
=(G1+G2+G3)+3A,(设:A1=A2=A3=A)
= G+3A,
30
(G=G1+G2+G3)
C
② 无全红的T1三相位信号控制配时图
其中: 相位1时间 = G1+A+r , 相位2时间 = G2+A+r
34
有全红时间的多相位信号控制,其信号周 期的一般表达式为:
n
C Gi n( A r) G n( A r) i 1
显然当r = 0时,即无全红信号控制是有全 红信号控制的一个特例。
35
例3-3-1 现有一两相位信号控制交叉口。信号周 期C=60秒,黄灯时间A=3秒,相位A绿灯时间 G1=30秒,无全红时间。试求: (1)绘制信号配时图,并给出标注; (2)周期表达式。
n
C Gi nA i 1
C = G + nA , G为周期绿灯时间
32
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
技术教育
12
二、交通信号相位设计 1、信号相位必须同交叉口进口道车道渠化(即车道功 能划分)方案同时设定。 2、信号相位对应于左右转弯交通量及其专用车道的布 置,常用基本方案示于图。
技术教育
13
技术教育
14
3、有左转专用车道时,根据左转流向设计交通量计
算的左转车每周期平均到达3辆时,宜用左转专用相
第三章 单个交叉口交通信号控制
§1 定时信号控制 §2 交通感应信号控制
技术教育
1
一、定时信号控制的主要特点
1、全天可以是一个配时方案,或多个配时方案; 2、在每个时段,执行固定的配时方案; 3、配时方案来自于历史调查数据; 4、可以手动、自动切换配时方案; 5、信号机安装简单,维护方便,成本低。
位。
4、同一相位各相关进口道左转车每周期平均到达量
相近时,宜用双向左转专用相位;否则宜用单向左
转专用相位。
5、当信号相位中出现不均衡车流时,可以通过合理
设置交通信号的早断与滞后,最大限度地提高交叉
口的运行效率。
技术教育
15
针对路口的具体交通流状况进行合理的信号相位设计, 既要考虑减少冲突、防止碰撞、避免堵塞,又要考虑减少设 备投入、提高通行效率。因此合理设计信号相位是路口信号 控制的关键之一。例如,倘若在不需要设置左转专用相位的 路口设置了左转专用相位,就会导致既增加了设备投入(左 转车道灯)又降低了路口通行效率。
需的时间,
cm
L
n
1
yi
L 1Y
1
Cm
L V1 S1
Cm
V2 S2
Cm
Vi S i1
Cm
L——周期损失时间:
通 行P 能 力
使交叉口具有足够的通行能力;
使交叉口具有较小的车辆延误。
须确定:1、最短周期
0 车
周期
2、最佳周期
辆P 延
3、绿信比
误
0
Cm
C0
0技.术7教5育C0
1.5C0
周期
21
(1)最短信号周期cm 采用cm时,在一个周期内到达交叉口的车辆恰好全部被放 行,既无滞留车辆,信号周期也无富余。因此,cm恰好等于一 个周期内损失时间L加上全部到达车辆以饱和流量通过交叉口所
用相位(必须有左转专用车道);
③ 当单方向的左转车辆较多又不足以专设左转信号相位时,
可以采用一种交通信号早断与滞后的设计方法,间接为左转车
辆提供专内容
➢ (3)交通信号的早断与滞后 ➢ 相位信号的早断: 是指将相位的绿灯时间划分为两个阶段,先放行与具 有较大左转车流的方向相对的直行车流,再放行较大左转车流。 ➢ 相位信号的滞后: 是指将相位的绿灯时间划分为两个阶段,先放行较大 左转车流,再放行与具有较大左转车流的方向相对的直行车流。 ➢ 使用条件:
定时信号配时方法,在国际上主要有美国HCM 法、澳大利亚ARRB法、英国WEBSTER法等,我国主 要有停车线法及冲突点法。
技术教育
11
一、新建交叉口信号方案 新建交叉口,在缺乏交通量数据的情况下,十字
交叉口,建议先按表1.3所列进口车道数与渠化方案 选取初步试用方案;T形交叉口,建议先用三相位信 号;然后根据通车后实际交通各流向的流量调整渠化 及信号相位方案。
➢ ①单向左转车辆较多; ➢ ②增设双向左转专用车道、设置左转专用信号相位不合算; ➢ ③左转车辆不能利用对向直行车辆之间的空档全部驶离交叉口。
双向左转车辆较少 双向左转车辆较多 单向左转车辆较多
车道设置 双向左直合用车道 双向左转专用车道 单向左转专用车道
相位设置 无需左转专用相位 左转专用相位 信号早断或滞后
技术教育
2
1、交叉口的相位设计 在进行交叉口的相位划分时,一般应遵循以下
原则: (1)渠化协调原则 (2)安全通行原则 (3)流量均衡原则 (4)高效运行原则
技术教育
3
1、交叉口的相位设计 在交叉口的相位划分之后,需要安排相位的运
行顺序,即确定相序。
一般一个进口的所有流向要在连续相位中放行
完毕。有左转待行区的交叉口,一般情况下要先放 行直行车流再放行左转车流。
➢ 高峰小时修正系数 PHF ➢ 流量(流率) q ➢ 饱和流量 S ➢ 流量(率)比 y(=q/S ) ➢ 通行能力 N(=λS) ➢ 饱和度 x(=q/N ) ➢ 信号配时图 ➢ 相位图 ➢ 延误 d、D
技术教育
20
3、信号周期设计
交叉口的信号配时,应选用同一相位流量比(q/S)中
最大者进行计算。 通常考虑的要求:
技术教育
16
在信号相位设计中,左转车流对相位的划分起着非常重要
的作用,也是信号相位设计的重点难点。左转车流对信号相位
的划分可以采用如下策略:
① 当左转车辆较少时(左转车辆可以利用直行车辆之间的空
档左转),不需要为左转车辆提供专用相位;
② 当左转车辆较多时(左转车辆仅利用直行车辆之间的空档
左转比较困难,容易引发车辆堵塞),需要为左转车辆提供专
技术教育
18
(一)定时信号配时方案的基本内容
➢ (3)交通信号的早断与滞后
如图所示的十字交叉口就是一个信号早 断的例子。在这里, 西进口是左转车流 量较大的一个方向。该交叉口采用东— 西、南—北两相位,对于东西相位而言, 信号要划分两个阶段。先放行东进口的 各个车辆和西进口的直行、右转车流, 然后禁止东进口的各个方向车流,只允 许西进口的各个车流通行。
技术教育
19
(一)定时信号配时方案的基本内容
➢ 2、信号基本控制参数
➢ 损失时间 L
信号相位 周期长度 C (显示)绿灯时间 G 有效绿灯时间 Ge (显示)红灯时间 R 有效红灯时间 Re 绿信比 λ(= Ge /C) 黄灯时间 A(=3秒) (I<A时,I=A) 绿灯间隔I(包括黄灯和全红)
技术教育
4
2、关键车道的确定 部分进口道(及其交通需求)起着决定性的作
用,我们把这部分进口道称为关键车道。根据车流 通行的特点,进口道可以分为:直行车道、合用车 道和转弯专用车道。
模型一 ——直、左、右合用车道
技术教育
5
技术教育
6
技术教育
7
技术教育
8
技术教育
9
技术教育
10
单个交叉口定时交通信号配时设计内容应包括: 确定多段式信号配时时段划分、配时时段内的设计交 通量、交通信号相位方案(交叉口车道渠化)、信号 周期时长、各相位信号绿信比、评估服务水平及绘制 信号配时图。