GPS广播星历计算卫星位置和速度-Read
GPS卫星的坐标计算
GPS卫星的坐标计算第三章GPS 卫星的坐标计算在⽤GPS 信号进⾏导航定位以及制订观测计划时,都必须已知GPS 卫星在空间的瞬间位置。
卫星位置的计算是根据卫星导航电⽂所提供的轨道参数按⼀定的公式计算的。
3.1卫星运动的轨道参数3.1.1基本概念 1.作⽤在卫星上⼒卫星受的作⽤⼒主要有:地球对卫星的引⼒,太阳、⽉亮对卫星的引⼒,⼤⽓阻⼒,⼤⽓光压,地球潮汐⼒等。
中⼼⼒:假设地球为匀质球体的引⼒(质量集中于球体的中⼼),即地球的中⼼引⼒,它决定卫星运动的基本规律和特征,决定卫星轨道,是分析卫星实际轨道的基础。
此种理想状态时卫星的运动称为⽆摄运动,卫星的轨道称为⽆摄轨道。
摄动⼒:也称⾮中⼼⼒,包括地球⾮球形对称的作⽤⼒、⽇⽉引⼒、⼤⽓阻⼒、⼤⽓光压、地球潮汐⼒等。
摄动⼒使卫星运动产⽣⼀些⼩的附加变化⽽偏离理想轨道,同时这种偏离量的⼤⼩随时间⽽改变。
此种状态时卫星的运动称为受摄运动,卫星的轨道称为受摄轨道。
虽然作⽤在卫星上的⼒很多,但这些⼒的⼤⼩却相差很悬殊。
如果将地球引⼒当作1的话,其它作⽤⼒均⼩于10-5。
2.⼆体问题研究两个质点在万有引⼒作⽤下的运动规律问题称为⼆体问题。
3.卫星轨道和卫星轨道参数卫星在空间运⾏的轨迹称为卫星轨道。
描述卫星轨道状态和位置的参数称为轨道参数。
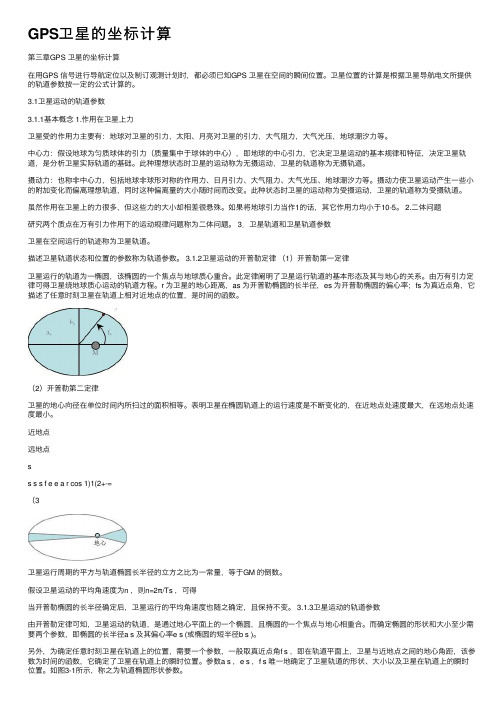
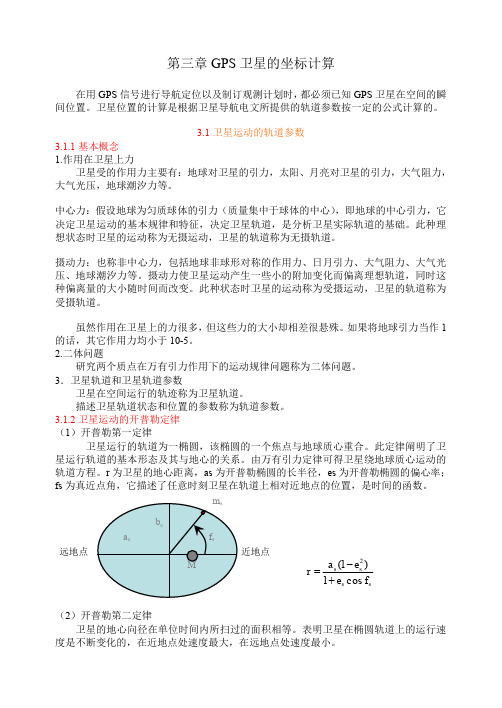
3.1.2卫星运动的开普勒定律(1)开普勒第⼀定律卫星运⾏的轨道为⼀椭圆,该椭圆的⼀个焦点与地球质⼼重合。
此定律阐明了卫星运⾏轨道的基本形态及其与地⼼的关系。
由万有引⼒定律可得卫星绕地球质⼼运动的轨道⽅程。
r 为卫星的地⼼距离,as 为开普勒椭圆的长半径,es 为开普勒椭圆的偏⼼率;fs 为真近点⾓,它描述了任意时刻卫星在轨道上相对近地点的位置,是时间的函数。
(2)开普勒第⼆定律卫星的地⼼向径在单位时间内所扫过的⾯积相等。
表明卫星在椭圆轨道上的运⾏速度是不断变化的,在近地点处速度最⼤,在远地点处速度最⼩。
近地点远地点ss s s f e e a r cos 1)1(2+-=(3卫星运⾏周期的平⽅与轨道椭圆长半径的⽴⽅之⽐为⼀常量,等于GM 的倒数。
从广播星历计算卫星位置
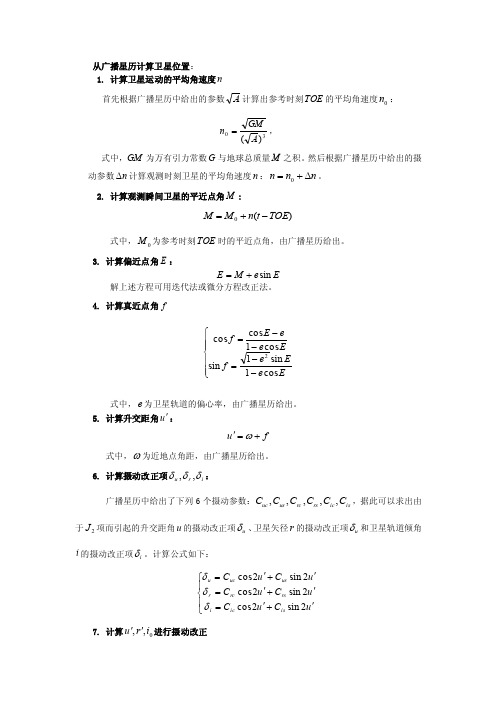
从广播星历计算卫星位置: 1. 计算卫星运动的平均角速度n首先根据广播星历中给出的参数A 计算出参考时刻TOE 的平均角速度0n :30)(A GM n =,式中,GM 为万有引力常数G 与地球总质量M 之积。
然后根据广播星历中给出的摄动参数n ∆计算观测时刻卫星的平均角速度n :n n n ∆+=0。
2. 计算观测瞬间卫星的平近点角M :)(0TOE t n M M -+=式中,0M 为参考时刻TOE 时的平近点角,由广播星历给出。
3. 计算偏近点角E :E e M E sin +=解上述方程可用迭代法或微分方程改正法。
4. 计算真近点角f⎪⎪⎩⎪⎪⎨⎧--=--=E e E e f Ee e Ef cos 1sin 1sin cos 1cos cos 2式中,e 为卫星轨道的偏心率,由广播星历给出。
5. 计算升交距角u ':f u +='ω式中,ω为近地点角距,由广播星历给出。
6. 计算摄动改正项i r u δδδ,,:广播星历中给出了下列6个摄动参数:is ic rs rc us uc C C C C C C ,,,,,,据此可以求出由于2J 项而引起的升交距角u 的摄动改正项u δ、卫星矢径r 的摄动改正项u δ和卫星轨道倾角i 的摄动改正项i δ。
计算公式如下:⎪⎩⎪⎨⎧'+'='+'='+'=u C u C u C u C u C u C is ic irs rc r us uc u 2sin 2cos 2sin 2cos 2sin 2cos δδδ 7. 计算0,,i r u ''进行摄动改正⎪⎪⎩⎪⎪⎨⎧-++=+-=+'=+'=)()cos 1(0TOE t dt di i i E a r r u u i r r u δδδδ 式中:a 为卫星轨道的长半径,2)(A a =,0i 为TOE 时刻的轨道倾角,由广播星历中的开普勒六参数给出,dtdi为i 的变化率,由广播星历中的摄动九参数给出。
GPS卫星坐标计算
GPS卫星坐标计算GPS(全球定位系统)是一种通过地球上的卫星提供位置和时间信息的导航系统。
GPS卫星坐标计算是指根据接收到的卫星信号来确定观测站位于球面上的位置。
GPS系统是由一组位于中轨道上的卫星组成,它们每天绕地球运行两次,以提供全球的覆盖范围。
每个卫星都携带有高精度的原子钟,用来产生精确的时间信号。
GPS接收机位于地面上,它接收到来自多颗卫星的信号,并测量信号的到达时间和卫星位置。
经过计算,接收机可以确定自身的空间坐标。
计算GPS卫星坐标的过程可以分为以下几个步骤:1.接收卫星信号:GPS接收机通过天线接收到来自多颗卫星的信号。
2.测量信号到达时间:接收机测量每个信号的到达时间,这需要精确的时钟。
由于GPS接收机一般没有原子钟那样的高精度时钟,所以需要利用接收到的卫星信号来校准本地时钟。
3.计算卫星位置:GPS接收机需要知道每颗卫星在接收时间点的准确位置。
每颗卫星通过广播自身的位置和时间信息,接收机可以根据接收到的信号来计算卫星的位置。
4.求解距离:接收机通过测量信号到达时间和卫星位置计算出距离。
由于信号的传播速度是已知的大约是光速,我们可以根据距离和到达时间计算出信号的传播时间。
5.根据接收到的信号来计算自身的位置。
接收机通过多个卫星信号的距离来确定自身的位置,这涉及到多种解算方法,例如最小二乘估计等。
接收机需要至少接收到四颗卫星的信号来解算自身的位置。
这些步骤涉及到大量的数学和物理计算,例如测量时间、测量距离、计算坐标等。
为了提高计算的精度,还需要考虑一些因素,例如信号传播时的大气延迟等。
总的来说,GPS卫星坐标计算是一项复杂而精确的工程,涉及到多个步骤和数学模型。
随着技术的不断进步,GPS定位的精度和可靠性也在不断提高,为导航、地球科学等领域的应用提供了重要的支持。
GPS卫星的坐标计算
第三章GPS 卫星的坐标计算在用GPS 信号进行导航定位以及制订观测计划时,都必须已知GPS 卫星在空间的瞬间位置。
卫星位置的计算是根据卫星导航电文所提供的轨道参数按一定的公式计算的。
3.1卫星运动的轨道参数3.1.1基本概念 1.作用在卫星上力卫星受的作用力主要有:地球对卫星的引力,太阳、月亮对卫星的引力,大气阻力,大气光压,地球潮汐力等。
中心力:假设地球为匀质球体的引力(质量集中于球体的中心),即地球的中心引力,它决定卫星运动的基本规律和特征,决定卫星轨道,是分析卫星实际轨道的基础。
此种理想状态时卫星的运动称为无摄运动,卫星的轨道称为无摄轨道。
摄动力:也称非中心力,包括地球非球形对称的作用力、日月引力、大气阻力、大气光压、地球潮汐力等。
摄动力使卫星运动产生一些小的附加变化而偏离理想轨道,同时这种偏离量的大小随时间而改变。
此种状态时卫星的运动称为受摄运动,卫星的轨道称为受摄轨道。
虽然作用在卫星上的力很多,但这些力的大小却相差很悬殊。
如果将地球引力当作1的话,其它作用力均小于10-5。
2.二体问题研究两个质点在万有引力作用下的运动规律问题称为二体问题。
3.卫星轨道和卫星轨道参数卫星在空间运行的轨迹称为卫星轨道。
描述卫星轨道状态和位置的参数称为轨道参数。
3.1.2卫星运动的开普勒定律 (1)开普勒第一定律卫星运行的轨道为一椭圆,该椭圆的一个焦点与地球质心重合。
此定律阐明了卫星运行轨道的基本形态及其与地心的关系。
由万有引力定律可得卫星绕地球质心运动的轨道方程。
r 为卫星的地心距离,as 为开普勒椭圆的长半径,es 为开普勒椭圆的偏心率;fs 为真近点角,它描述了任意时刻卫星在轨道上相对近地点的位置,是时间的函数。
(2)开普勒第二定律卫星的地心向径在单位时间内所扫过的面积相等。
表明卫星在椭圆轨道上的运行速度是不断变化的,在近地点处速度最大,在远地点处速度最小。
近地点远地点ss s s f e e a r cos 1)1(2+-=(3卫星运行周期的平方与轨道椭圆长半径的立方之比为一常量,等于GM 的倒数。
应用单组广播星历适时确定GPS卫星的位置
时 的参 考 历 元 的 卫 星 位 置 参 数 。笔 者 通 过 实 验 发
现 . 多 G S接收 机 只 能 接 收 到观 测 时 间段 附 近 的 很 P
广播 星历 。 若观 测 时段在 两参 考 历 元 中 间 。 只能 接 则 受到 后一 参考 历 元 的 广播 星历 . 观 测 时 段 刚 好 跨 若 过某 一参 考历 元 . 接 受 机 能 接 收 到 本 参 考 历 元 和 则 后续参 考 历 元 的 两组 广播 星历 。因 此 。 计 算 较 短 要 观测 时段 内任 意 时 刻 的卫 星 位 置 。 时 只能 应 用 唯 有
表 1 广 播 星 历 坐 标 和 精 密 星 历 坐 标 差 值
内的卫 星 的某 些 时 刻 的 地 心 坐 标 . 一 步 通 过 内插 进
广 播 星历 的情况 下 。 为保 证卫 星 定 位 的精 度 . 计算 在 卫 星 的任意 时刻 的坐 标 的时 候一 般 限制卫 星 星 历外 推 的时 间不超 过 1 时 。当 只接 收 到 一 组卫 星 的 广 小 播 星历 时 。 同样 应 用 时 间外 推 的方 法计 算 卫 星在 该
位 的需 要 。但是 精 密星历 只 能在 G S观测 的几 天 后 P
1 应 用 单组 广播 星历 计算 G S卫 星的 位置及 其 结 P
果 分 析
G S卫 星 的广播 星 历 提供 1 P 6个 卫 星星 历 参 数 . 其 中包括 1 参考 时刻 . 相 应参 考 时刻 的开普 勒 个 6个 轨 道 根数 和 9个 轨 道摄 动 改正 参 数 。可 应 用这 些 参 数 计算 任 意 时刻 卫 星 在 地 固 系 WG 8 S 4中 的 三 维 坐 标 [ 。G S接 收机 接 收到 的卫 星 的广 播 星历 每 隔 两 5 P 3
GPS广播星历计算卫星位置和速度

GPS广播星历计算卫星位置和速度GPS(全球定位系统)是一种通过卫星定位的技术,它利用卫星发射的广播星历来计算卫星的位置和速度。
星历数据是需要事先计算和上传给卫星的。
在GPS系统中,有31颗运行在中轨道上的卫星,其中至少有24颗是激活状态的。
这些卫星分布在不同的轨道上,每个轨道上约有4颗卫星。
卫星轨道分为6个球形环,每个环的倾角不同,倾角越大表示距离地球赤道越远。
每颗GPS卫星都具有精确的时钟,它们通过广播信号发送自身的位置和速度信息。
这些广播信号被接收器接收后,通过计算接收时间差来确定卫星与接收器之间的距离。
利用三个以上的卫星的广播信号,可以计算出接收器所在的位置。
星历数据是卫星的位置和速度信息,它用于计算接收器附近的卫星位置和速度。
星历数据包括每颗卫星的轨道参数(半长轴、偏心率、轨道倾角、升交点赤经、近地点幅角、运动角频率)、卫星钟差和卫星偏差改正参数等。
星历数据的计算是一个复杂的过程,需要考虑多个因素。
首先,需要从测量数据中估算卫星位置和速度。
接着,根据卫星轨道的数学模型和测量数据,通过插值和拟合等算法计算出卫星的位置和速度数据。
最后,通过计算误差和改正项进行数据校正。
这些校正项包括大气延迟、钟差、轨道摄动等。
星历数据的计算过程是集中在地面控制站完成的,然后通过双向通信链路上传给卫星。
卫星接收到星历数据后,会将其存储在内部存储器中,并通过广播信号发送给地面的接收器。
在接收器接收到卫星广播信号后,会利用星历数据来计算卫星与接收器之间的距离。
首先,接收器会粗略估算卫星位置,然后通过星历数据进行细化校正,最终得到精确的卫星位置和速度信息。
利用卫星位置和速度信息,接收器可以计算出自身的位置。
通过接收多个卫星的广播信号,接收器可以确定自身在地球的经度、纬度和海拔高度。
在接收器上,还可以通过计算卫星位置的变化来确定速度。
通过不同时刻测量卫星位置的变化,可以计算出接收器的速度矢量。
总结起来,GPS广播星历是用于计算卫星位置和速度的关键数据。
GPS星历
GPS 信号结构及卫星星历。
GPS 卫星发射的信号是由载波、测距码和导航电文三部分组成的。
载波是指可运载调制信号的高频振荡波。
GPS 卫星所用的载波有两个。
由于它们均位于微波的L 波段,故分别称为L1 载波和L2 载波。
其中L1 载波是由卫星上的原子钟所产生的基准频率f0=10.23MHz 倍频154 倍后形成的,即f1=154*f0=1575.42MHz,其波长λ1 为19.03cm。
载波是基准频率f0 倍频120 L2 后形成的,即f2= 120*f0=1227.60MHz,其波长λ2 为24.42cm。
采用两个频率的目的是为了较完善地消除电离层延迟。
采用高频率载波的目的是为了更精确地测定多普勒频移,从而提高测速的精度;减少信号的电离层延迟,因为电离层延迟是与信号频率f 的平方成反比的。
测距码是用于测定从卫星到接收机之间距离的二进制码。
GPS 卫星中所用的测距码从性质上讲属于伪随机噪声码。
根据其性质和用途的不同,测距码可分为粗码(C/A 码)和精码(P 码或Y 码)两类,每个卫星所用的测距码互不相同且相互正交。
粗码C/A 码,又称为粗捕获码,它被调制在L1 载波上,是1MHz 的伪随机噪声码(PRN 码),其码长为1023 位(周期为1ms )。
由于每颗卫星的C/A 码都不一样,因此,经常用它们的PRN 号来区分它们。
C/A 码是普通用户用以测定监测站到卫星间的距离的一种主要信号。
精码P(Y)码,又称为精码,它被调制在L1 和L2 载波上,是10MHz 的伪随机噪声码,其周期为7 天。
在实施AS 时,P 码与W 码进行模二相加生成保密的Y 码,此时,一些用户无法利用P 码来进行导航定位。
导航电文是GPS 卫星向用户播发的一组反映卫星在空间的位置、卫星的工作状态、卫星钟的修正参数,电离层延迟修正参数等重要数据的二进制代码,也称数据码(D 码)。
广播星历,这种星历是主控站利用跟踪站收集的观测资料计算并外推出未来两周的星历,然后注入到GPS 卫星,形成导航电文供用户使用。
GPS卫星坐标计算分解

主要内容 2.1卫星坐标系简介 2.2偏近点角E与真近点角f的关系公式推导 2.3卫星位置计算推导过程 2.4二体问题的星位置计算解析
第二章 GPS卫星位置的计算
2.1卫星坐标系简介
一、WGS-84大地坐标系 1、WGS-84大地坐标系定义
WGS-84(World Geodetic System,1984年)是美国国防 部研制确定的大地坐标系,其 坐标系的几何定义是:
顶为正),以子午线方向为x轴(向北为正 ),y轴与x、z轴垂直(向东为正)。
站心赤道直角坐标系与站心地平直角坐 标系之间的关系
X sin B cos L
Y
sin
B
sin
L
Z
站赤
cos B
sin L cos L
0
cos B cos L x
cos
B
sin
L
y
sin B z 地平
站心地平直角坐标系与球心空间直角坐
椭球第一偏心率: e2=0.00669437999013 地球引力常数: GM=(39860050.6)108(m3/s2)
正常化二阶带谐系数:J2=(–484.166851.30)10–9(rad/s) 地球自转角速度: ω=(72921150.1500)10–11(rad/s)
国际大地测量与地球物理联合会(IUGG)——International Union of Geodesy and Geophysics
1 e2 sin E
cos f
,sin f
1 e cos E
1 e cos E
第二章 GPS卫星坐标的计算 2.3 卫星在轨瞬时位置计算
2.3.1 广播星历
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
“GPS广播星历计算卫星位置和速度”
及“GPS伪距定位”计算试验
1.试验内容及上交成果
1.1 试验内容
应用C语言按预定格式(函数、输入输出变量之名称、类型)编写“GPS广播星历计算卫星位置和速度”函数SatPos_Vel( )、“GPS伪距定位”函数Positioning( )。
将此两个函数组成文件F2.cpp,并包含于文件GPS_Positioning.cpp中。
编译、连接并运行文件GPS_Positioning.cpp,逐一时刻读取广播星历(Ephemeris.dat)、观测时间及伪距、卫星号(Observation.dat)信息,计算WGS84坐标系中观测时刻相应的卫星位置、速度以及载体位置,结果保存于文件Position.dat中。
1.2 上交成果
磁盘文件F2.cpp、Position.dat,并存于“学号作者中文姓名”目录中。
2.函数说明
2.1 星历文件读取函数
void EFileReading(Efile)
功能:读取星历文件,给星历数据结构体Ephemeris赋值。
输入变量:EFile 字符串,文件名。
2.2 观测数据读取函数
int ObsReading(fp_Obs,Time,Rho,Mark)
功能:从文件Observation.dat中读取某一时刻的伪距、卫星号。
读取成功函数值返回“1”,失败返回“-1”(读错,或至文件尾)。
输入变量:fp_Obs 文件指针;
输出变量:Time double,时间(秒);
Rho double[12],伪距(米);
Mark int[12],卫星号,“-1”表示此通道无卫星、无伪距。
2.3 最小二乘估计函数
int LeastSquareEstimation(Y,A,P,m,n, X)
功能:最小二乘方法求解观测方程Y=AX+ε,其中观测值方差阵的逆阵为P(也称为权阵),得未知参数X。
成功返回“1”,失败返回“-1”(亏秩)。
输入变量:Y double[m],观测方程自由项(米);
A double[m×n],系数阵(无量纲),按第1行第1、2……n元素,
第2行……顺序存放;
P double[m],权矩阵对角线元素,0或1(无量纲);
m int,观测值个数;
n int,未知参数个数;
输出变量:X double[n],未知参数(米)。
原理:X=(A T PA)-1A T PY
例:Y=[1,2,3,6],A=[1,0,0, 0,1,0, 0,0,1, 1,1,1],P=[1,1,1,1],m=4,n=3。
调用LeastSquareEstimation(Y,A,P,m,n, X),求得X=[1,2,3]。
2.4 计算卫星位置、速度函数
int SatPos_Vel(Num,Time, SatPos,SatVel)
功能:计算WGS84坐标系中卫星位置、速度。
成功返回“1”,失败返回“-1”(无星历)。
输入变量:Num int,卫星号;
Time double,时间(秒)。
(隐含引用全局变量Ephemeris[32],星历数据结构体)输出变量:SatPos double[3],位置(米,WGS84);
SatVel double[3],速度(米/秒,WGS84)。
2.5 伪距测量定位
int Positioning(Time,Rho,Mark, Pos,dt)
功能:由单一时刻伪距计算载体位置,并保存接收机钟面时、卫星位置、速度及载体位置于定位结果文件Position.dat中。
成功返回“1”,失败返回“-1”(观测
值数量不够,亏秩)。
输入变量:Time double,伪距观测时刻接收机钟面时(秒);
Rho double[12],伪距(米);
Mark int[12],卫星号,“-1”表示此通道无信号;
输出变量:Pos double[3],载体位置(米,WGS84);
dt double,钟差(秒)。
3.全局变量说明
LightVelocity 字符常量,光速(米/秒),299 792 458;
PI 字符常量,圆周率,3.141 592 653 589 793;
MU 字符常量,地球引力常数(米3秒-2),3.986005e14;
OMEGAE 字符常量,地球自转角速度(弧度·秒-1),7.292115e-5;
fp_Obs 文件指针,观测数据文件;
fp_Pos 文件指针,位置结果文件。
Structure Eph_Str
{
Mark 整型,标识,“1”有,“-1”无
wn 整型,星期数
toc 卫星钟差改正参考时刻(秒)
af2 卫星钟差改正系数(秒/秒2)
af1 (秒/秒)
af0 (秒)
aode 数据龄期
deltan 平均角速度改正(半周/秒)
m0 参考时刻平近点角(半周)
e 偏心率;
roota a1/2(米1/2)
toe 星历参考时刻(秒)
cic (弧度)
crc (米)
cis (弧度)
crs (米)
cuc (弧度)
cus (弧度)
omega0 准升交点赤经(半周)
omega 近地点角距(半周)
i0 轨道倾角(半周)
omegadot 升交点赤经变化率(半周/秒)
idot 轨道倾角变化率(半周/秒)
}Ephemeris[32] 星历数据结构体。
注:数据类型除注明整型外,其余为双精度型。
4.文件说明
4.1 观测数据文件Observation.dat
Time, n 伪距观测时间,卫星颗数
Rho_1, n_1 伪距(米),卫星号
……
Rho_n, n_n 伪距(米),卫星号
Time, n 伪距观测时间,卫星颗数
……
4.2 卫星星历数据文件Ephemeris.dat
svprn 整数,卫星号
wn 整数,星期数
……
idot 轨道倾角变化率(半周/秒)
(详细说明请参见数据结构体Structure Eph_Str Ephemeris[32])svprn 整数,卫星号
……
4.3 位置计算结果文件Position.dat
Time 伪距观测时刻(秒)
n_1,x_1,y_1,z_1, xdot_1,ydot_1,zdot_1 卫星号,卫星坐标(米,WGS84),速度(米/秒)……
n_n,x_n,y_n,z_n, xdot_n,ydot_n,zdot_n 卫星号,卫星坐标(米,WGS84),速度(米/秒)x,y,z 载体坐标(米,WGS84)
Time 伪距观测时刻(秒)
……
4.4 GPS_Positioning.cpp
作为主函数,调用Parameter.h、Function.h、F1.cpp、F2.cpp。
逐一时刻读取广播星历、伪距等信息,计算卫星位置、速度及载体位置。
4.5 Parameter.h
字符常量定义、全局变量说明。
4.6 Function.h
函数说明。
4.7 F1.cpp
包含辅助函数如下;
广播星历读取函数EFileReading() ;
观测数据(时间、卫星个数、伪距、卫星号)读取函数ObsReading();
最小二乘法求解函数LeastSquareEstimation();
矩阵相乘计算函数MatrixMultiply();
高斯选主元消去法矩阵求逆函数MatrixInverse();
三维向量长度计算函数VectorLength()。
4.8 F2.cpp
包含函数如下:
卫星位置、速度计算函数SatPos_Vel();
伪距定位函数Positioning()。
5.首历元观测时刻参考答案(Position.dat)
193645.0
29 -15567798.7 945675.6 21321624.5 249.3 -2743.6 303.3
0 14665363.6 9394841.8 20224091.6 -2310.3 1043.6 1194.9
20 -10127606.0 21492092.3 -10899994.3 -90.1 -1466.0 -2807.9
21 -1578334.5 26219741.9 -284477.9 -409.9 -14.9 3151.8
28 -20375527.0 15214719.7 7639734.1 -975.7 140.2 -2976.3
24 -2456690.1 16712706.9 20740220.7 -2203.1 -1370.0 828.0
5 -24924627.9 3359562.9 9069955.
6 937.9 -673.8 2850.3
13 11881411.2 12148251.4 20386065.1 -509.3 2539.5 -1217.6 -2196881.6 5177555.2 2998042.2。