外槽轮机构的运动分析
槽轮机构的运动分析与优化设计
⑥
2 1 SiT c. nn. 0 c. eh E gg 1
仪 表 技 术
槽 轮 机 构 的运 动 分析 与优 化 设 计
章 磊 赵 鹏 兵
( 都 亿 维 电 力 成 套 设 备 有 限公 司 , 都 60 4 ; 北 工 业 大 学 现代 设 计 与 集 成 制 造 技 术 教 育 部 重点 实 验 室 , 安 70 7 ) 成 成 10 1西 西 10 2
一
0 ≤ 0 ≤ 00 加 2 2。
3 算例研究 ”]
中 图法分类号
T 1.; H12 4
文献标志码
A
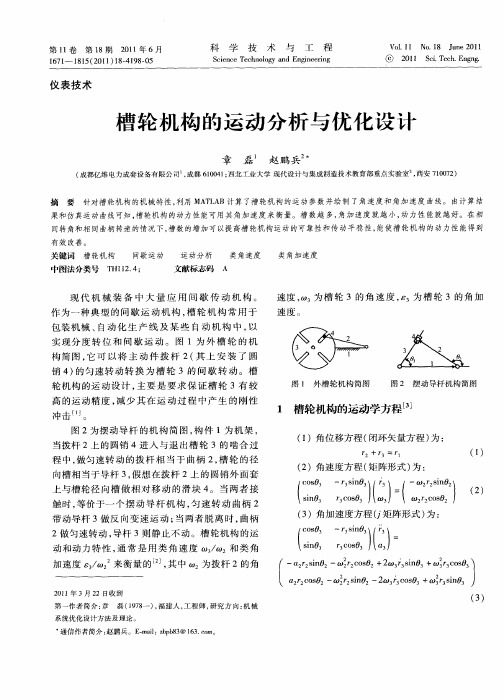
现代 机 械 装 备 中大 量 应 用 间歇 传 动 机 构 。
作 为一 种典 型 的 间 歇 运 动 机 构 , 轮 机 构 常 用 于 槽 包装机械 、 自动 化 生 产 线 及 某 些 自动 机 构 中 , 以
实 现 分 度 转 位 和 间 歇 运 动 。 图 1为 外 槽 轮 的 机
速 度 , 为槽 轮 3的角 速 度 , 为 槽 轮 3的 角 加 ,
速度 。
构 简 图 , 可 以 将 主 动 件 拨 杆 2 其 上 安 装 了 圆 它 (
销 4) 的匀 速 转 动 转 换 为 槽 轮 3的 间 歇 转 动 。槽
轮机 构 的运 动 设 计 , 主要 是 要 求 保 证 槽 轮 3有 较
图 1 外 槽 轮 机 构 简 图 图 2 摆 动 导杆 机 构 简 图
高 的运 动 精 度 , 少 其 在 运 动 过 程 中产 生 的 刚 性 减
冲击 ¨。
1 槽轮机构的运动学方程 ]
( )角 位 移 方 程 ( 环 矢 量 方 程 ) : 1 闭 为
槽轮机构(Geneva drive)
一、槽轮机构 1. 槽轮机构的组成及工作特点
槽轮机构的组成及工作特点
2. 槽轮机构的应用 一般用于转速不很高的自动机械、轻工机械或仪器仪表 中,例如电影放映机的送片机构,长图记录仪的打印机构 等。 3. 槽轮机构的类型 外槽轮机构 内槽轮机构 槽条机构 球面槽轮机构等
外槽轮机构 External Geneva drive
单齿外啮合传动 Externally meshed single-tooth intermittent gearing
部分齿外啮合传动 Externally meshed severaltooth intermittent gearing
单齿内啮合轮传动 Internally meshed singletooth intermittent gearing
二、棘轮机构 1. 棘轮机构的组成及工作特点
棘轮机构的组成及工作特点
2. 棘轮机构的应用 在工程中广泛应用于转位分度(Indexing)、进给(Feed)、 单 向 离 合 器 ( One-way clutch) 、 超 越 离 合 器 ( Overrun clutch) 、制动器(Brake)等。 3. 棘轮机构的类型 轮齿式棘轮(Tooth ratchet)机构 摩擦式棘轮(Friction ratchet) 机构
第五节 气动机构
气动机构(Pneumatic mechanism) 以压缩空气为工作介 质来传递动力和控制信号。
基本要求
● 了解槽轮机构、棘轮机构、不完全齿轮机构、凸轮式间歇 机构、螺旋机构、摩擦传动机构、气动机构的工作原理、 运动特点和适用场合。
第五章思考题
5-1、5-2、5-3
外啮合轮齿式棘轮机构 Externally meshed tooth ratchet mechanism
5.2间歇机构实验

实验5.2 间歇机构实验在各类机械中, 常需要使某些构件实现周期性的运动和停歇。
能将主动件的连续运动转换成从动件有规律的运动和停歇的机构, 称为间歇运动机构。
其中,槽轮机构是各类机械中常用的实现间歇运动的典型机构。
本实验主要针对外槽轮机构分析其运动特性。
【实验目的】1. 了解槽轮机构的运动过程。
2. 学会槽轮机构间歇运动的分析。
【实验内容】1.实验仪器CL-I 槽轮机构实验台,其机构主要有四槽轮机构、五槽轮机构和六槽轮机构组成,主要用于检测几种平面槽轮机构的运动规律。
有关击鼓尺寸参数如下:槽轮槽数:Z1=4,Z2=5,Z3=6拨盘圆销数:n1=1,n2=1,n3=1拔销滚子直径:d1=35mm ,d2=32mm ,d3=26mm槽轮中心距:L1=L2=L3=160mm槽轮外径:D1=278.96mm ,D2=260.86mm ,D3=278.34mm2.工作原理如图1所示,槽轮机构是由主动拨销轮、从动槽轮及机架组成,从动槽轮是由多个径向导槽所构成,各个导槽依次间歇地工作。
当主动拨销轮轴匀速转过h θ角时, 拨销拨动槽轮转过一个分度角h τ, 拨销退出导槽;然后拨杆又转过( 2π-h θ) 角, 此时槽轮静止不动, 直到拨销进入下一个导槽内时, 再重复上述过程,槽轮的定位通常是利用拨销轮上外凸的锁止弧锁住, 从而实现槽轮的单向间歇运动。
图1 槽轮机构如图2 所示, O1、O2 分别为从动槽轮和主动拨销轮的中心, A 、B 分别为拨销进入和退出导槽时的状态。
由于拨销在进入和退出导槽时, 其速度方向与导槽的中心线方向保持一致, 因此在这2 个位置上, 拨销轮的半径与槽的中心线相互垂直。
所以,h τ+h θ=π 。
图2 拨销进入和退出导槽轮的位置槽轮机构相关参数:槽轮运动角: β2=zπ2 拨盘运动角: α2=βπ2-拨盘上圆销数目:()22-<Z Z m圆销中心轨迹半径:βsin 1⨯=L R槽轮外径:()⎥⎥⎦⎤⎢⎢⎣⎡⎪⎭⎫ ⎝⎛+⨯=21222sin d L R β 槽轮深度:δ++-+=221d L R R h 拨盘回转轴直径:()212R L d -< 拨盘上锁止弧所对中心角:⎪⎭⎫ ⎝⎛-=απm v 2 槽轮每循环运动时间:n z z t r ⎥⎦⎤⎢⎣⎡-=230槽轮每循环停歇时间:()()n mz z m z t d ⎥⎦⎤⎢⎣⎡--=2230槽轮机构的动停比:()()()()222---=z m z z m k当槽轮槽数较大时,一般δ的取值范围为3-6mmTL-I 凸轮机构试验台采用单片机与A/D 转换集成相结合进行数据采集,处理分析及实现与PC 机的通信,达到适时显示运动曲线的目的。
槽轮机构在SolidWorks中的建模装配与运动分析

插 件 ,它 可 以精 确 地 建 立 各 种 复 杂 的实 际仿 真 模 型 。介 绍 了如 何 利 用 它 进行 槽 轮 机 构 建 模 装 配 与 运 动 分 析 。 关 键 词 :槽 轮 机 构 ;S l W ok ;C M0s T1 oi r s 0S d M0 0N;建 模
中 图 分 类 号 :T 3 1 7 P 9. 文 献 标 识 码 :A
0 引 言
槽 轮机 构 由具有 径 向槽 的槽 轮 和具有 圆销 的构 件 以及机 架组 成 ,用 于传递 平行轴 的运 动 。在机 械 中一 般 应用 在转 速不 高 和要求 间歇转 动 的装置 中 ,如 自动 机 的 自动传 送链 装置 、 电影放 映机构 等 等 。 oiWo k Sl d rs 是优 秀 的 C AD 软件 之 一 ,它可 以精 确 地 建立 各 种 复 杂 的实 际仿 真模 型 , O MO OT ON 是其 C C S I AE的 应 用插 件 ,它可 进行 机构 的干涉 分析 ,跟 踪零 件 的运 动 轨迹 , 析机 构 中零件 的速度 、 速度 、 用力 、反 分 加 作 作 用力 和力 矩等 ,并 用动 画 、图形 、表格 等多 种形 式 表 示其 结果 ,其 分析 的结果 可指 导修 改零 件 的结构设 计或 调整 零件 的材 料 。下 面以一 实例说 明其 建模 装 配 与运 动 分析过 程 。
件 C M OS OS MOTI ON2 O 。 O 6
( )新建 装配 体 ,并绘 制草 图 。 2 ( )在基 准 面 中新 建零 件 1及绘草 图 ,并 给 予拉 3 伸 1 、拉 伸 2 、拉伸 3 、切除拉 伸 1 、阵列 1 、切除拉 伸 2以及 圆角 1特征 ,三维模 型见 图 2 。 ( )在基 准面 中新 建零件 2及 绘草 图 ,并 给予 拉 4 伸 1 、拉 伸 2 、切 除拉伸 1 、拉 伸 3 、阵列 1 、切除拉 伸 2特征 , 维模 型见 图 3 。 ( )在基 准面 中新 建零件 3及 绘草 图 ,并 给予 拉 5 伸1 、拉 伸 2特征 ,三维 模 型见 图 4 。 ( )在 基准 面 中新建 零件 4及绘 草 图 ,并 给予拉 6 伸 特 征 ,三 维模 型见 图 5 。 ( )导 人 刚才 的 4个 零件 ,并 添加 3个 重 合和 4 7 个 同心 以及平 行距 离 和齿轮 配合 的关 系 ,装 配 的建立
小型肥皂压字机外槽轮机构运动分析

图 1 外 槽 轮 机 构
将 上述关 系代 入 ( ) 得外槽 轮机 构 的运动 系数 为 1 式
一 一
由于拨 盘 1通 常为匀 速转 动 , 以这个 时 间 的 比 所 值 可用 拨 盘转 角 的 比值 表示 。 于 只有一 个 圆销 的外 对 槽 轮机 构 , 时间 与 所对应 的拨盘 转角分 别为 2 和 。 2 , 了使 槽 轮在 开始 和终止 转 动 时 的瞬 时角 速度 为 丌为
工机 械 中及各 种多 工位 组合机 床 等常用 槽轮作 为转位 机构 。 此外 也 常与其 它机 构组 合 , 自动 生产线 中作为 在 工件 传送或 转位 机构 。外 槽轮 机构是 传递 平行轴 运动
的平 面槽轮 机构 , 、 主 从动 轮转 向相反 。 结构 简单 , 装 安 容易。 1 外槽 轮机 构 的运动 分析 1 1 槽 轮机 构 的运动 系数 [ . 】 如 图 1 示 的外 槽 轮机构 中 , 所 在一个 运动循 环 中 , 槽轮 2 的运 动时 间 与 主动拨 盘 1 的运 动时 间 t 比 , 之 称 为该槽轮 机构 的运 动 系数 r则 。
出径 向槽 的 瞬 时 , 圆销 中心 的线 速度 方 向必 须沿 着 槽
轮径 向槽 的 中心线 方 向 。 由图 1中的几 何关 系可知 , 拨
若 欲使 r 0 5 槽轮 的运 动 时间总是 大 于其 静止 ≥ ., 时 间 。 在拨盘 1 均匀 分布 的装有 K 个 圆销 , 各 圆 可 上 且
维普资讯
第2 卷 第 1 6 期 20 0 8年 2月
轻 I机 械
Li htI du ty M a h n r g n sr c i e y
Vo . 6NO 1 12 . Fe . 0 8 b 2 0
槽轮机构的组成及其特点

槽轮机构的组成及其特点
槽轮机构是一种传动机构,由槽轮、槽辊和传动杆组成。
槽轮是由一
组弯曲的槽形装置构成,槽辊则是槽轮上运动的元件,传动杆则将槽辊上
下运动的变化传递给其他机构。
槽轮机构具有以下特点:
1.高承载能力:由于槽轮机构的传动方式是通过滚动运动,相比于摩
擦运动,其承载能力较高。
这使得槽轮机构能够承受较大的负载并保持稳
定性。
2.灵活的传动方式:槽轮机构可以通过调整槽轮的形状和槽辊的数量
来改变传动比例。
通过这种方式,可以实现高速传动和低速传动之间的转换。
3.紧凑结构:槽轮机构的构造相对较简单,占用空间相对较小。
这使
得它在有限空间内使用的场景中表现出色,例如机械设备和汽车传动系统。
4.耐磨耐久:槽轮机构的移动部件是槽辊,它通常由耐磨材料制成,
例如钢和铸铁。
这使得槽辊具有较长的寿命和高度的耐腐蚀性。
5.低噪音和高效率:由于槽辊的滚动运动,摩擦损失较小,因此槽轮
机构的工作噪音较低。
同时,槽轮机构的传递效率也相对较高,可以提高
传动效率并减少能源浪费。
槽轮机构MicrosoftWord文档
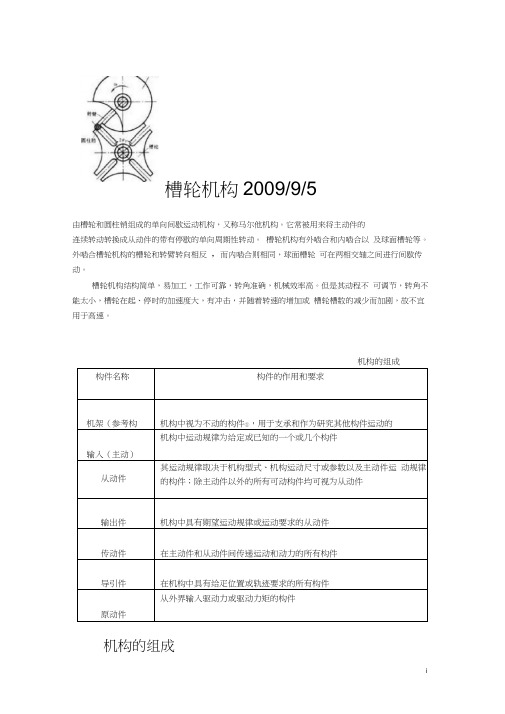
由槽轮和圆柱销组成的单向间歇运动机构,又称马尔他机构。
它常被用来将主动件的连续转动转换成从动件的带有停歇的单向周期性转动。
槽轮机构有外啮合和内啮合以及球面槽轮等。
外啮合槽轮机构的槽轮和转臂转向相反,而内啮合则相同,球面槽轮可在两相交轴之间进行间歇传动。
槽轮机构结构简单,易加工,工作可靠,转角准确,机械效率高。
但是其动程不可调节,转角不能太小,槽轮在起、停时的加速度大,有冲击,并随着转速的增加或槽轮槽数的减少而加剧,故不宜用于高速。
机构的组成构件名称构件的作用和要求机架(参考构机构中视为不动的构件①,用于支承和作为研究其他构件运动的输入(主动)机构中运动规律为给定或已知的一个或几个构件从动件其运动规律取决于机构型式、机构运动尺寸或参数以及主动件运动规律的构件;除主动件以外的所有可动构件均可视为从动件输出件机构中具有期望运动规律或运动要求的从动件传动件在主动件和从动件间传递运动和动力的所有构件导引件在机构中具有给疋位置或轨迹要求的所有构件原动件从外界输入驱动力或驱动力矩的构件机构的组成槽轮机构2009/9/5i§ 1。
1 机构的运动简图§1。
2 机构的自由度和具有确定运动条件§1,3 槽轮机构组成原理及结构分析(四)槽轮机构的设计要点(1)槽数和圆销数的确定根据使用场合所要求的分度数确定槽轮的槽数Z,根据对运动系数的要求确定圆销数m。
(2)中心距的确定它是决定槽轮机构所占空间大小的关键尺寸。
中心距偏大受到空间布局的制约。
若中心距太小,拨盘的关键尺寸R 也小;因而圆销直径和各部分的其它尺寸都不得不受到限制。
尺寸R 小,圆销和槽的受力就更大。
所以,中心距偏小受到强度的制约。
槽轮机构的其它结构尺寸的确定可参阅机械设计的有关手册。
2ee© i 一證盘吃一槽轮.二"间歇传动部件1博轮传动机构工作原理:如圍2.31所示,拨销盘叹不变的角速度 3 0就转,转it2P角时,槽轮鞋过相邻两槽间的夹角2cf 6拔销错过英余部分的角时,槽轮静止不动,直劉拔销进入下一个槽內.又重夏以上循环。
槽轮机构的动态特性及其影响因素分析
槽轮机构的动态特性及其影响因素分析槽轮机构的动态特性及其影响因素分析槽轮机构是一种常用的传动机构,具有许多独特的动态特性。
了解和分析槽轮机构的动态特性以及影响因素对于设计和优化传动系统非常重要。
下面将按步骤思考槽轮机构的动态特性及其影响因素,并进行分析。
第一步:了解槽轮机构的基本结构和工作原理。
槽轮机构由凸轮和凹槽组成,凸轮通过旋转使凹槽内的物体运动。
凸轮的运动轨迹决定了凹槽内物体的运动方式。
第二步:分析槽轮机构的动态特性。
槽轮机构的动态特性主要包括运动速度、加速度、位移和力等。
这些特性直接影响到机构的性能和运行稳定性。
第三步:探讨槽轮机构的运动速度特性。
槽轮机构的运动速度取决于凸轮的旋转速度和凹槽的形状。
凸轮旋转速度越大,物体在凹槽内的运动速度越快。
凹槽的形状也会影响运动速度,如凹槽的宽度和深度等。
第四步:研究槽轮机构的加速度特性。
槽轮机构的加速度描述了物体在凹槽内运动速度的变化率。
加速度可以通过凸轮的旋转加速度和凹槽形状来调节。
较大的加速度可以实现更快的物体运动速度和更高的效率。
第五步:分析槽轮机构的位移特性。
位移是物体在凹槽内的行程长度。
槽轮机构的位移受到凸轮的旋转角度和凹槽形状的影响。
凸轮旋转角度越大,物体在凹槽内的位移越大。
第六步:讨论槽轮机构的力特性。
力是槽轮机构传递的动力,直接影响着传动系统的性能和负载能力。
力的大小取决于旋转凸轮的力矩和摩擦、惯性等因素。
第七步:思考槽轮机构的影响因素。
影响槽轮机构动态特性的因素包括凸轮的形状、凹槽的设计、传动比、工作环境等。
凸轮的形状和凹槽的设计直接决定了机构的运动特性。
传动比影响着输出速度和力。
工作环境的变化也会对机构的运行稳定性产生影响。
最后,通过对槽轮机构的动态特性及其影响因素进行分析,可以为传动系统的设计和优化提供参考。
了解机构的动态特性有助于提高系统的运行效率和稳定性,通过调节影响因素可以实现更理想的传动效果。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
% 外槽轮机构运动分析
dr=pi/180.0; % 角度与弧度的转换系数
% 销轮2转角范围:-f20<f2<f20,步长为bc度,计算运动参数
for z=4:2:10 % 设定槽轮槽数
f30=pi/z; % 计算槽轮槽间半角
f20=pi/2-f30; % 计算销轮运动半角
lmd=sin(pi/z); % 计算曲柄2与机架1的长度比
bc=1; % 循环步长
cz=-f20/dr; % 循环初值
zz=f20/dr; % 循环终值
i=1; % 根据步长变化的运动参数矩阵cs行数计数器for f2=cz:bc:zz % 计算槽轮角位移、类角速度、类角加速度wy=atan(lmd*sin(f2*dr)/(1-lmd*cos(f2*dr)));
sd=lmd*(cos(f2*dr)-lmd)/(1-2*lmd*cos(f2*dr)+lmd^2);
jsd=-lmd*sin(f2*dr)*(1-lmd^2)/(1-2*lmd*cos(f2*dr)+lmd^2)^2;
switch z % 矩阵c(i,:)表示第i行的各列元素
case 4,c4(i,:)=[f2 wy/dr sd jsd];
case 6,c6(i,:)=[f2 wy/dr sd jsd];
case 8,c8(i,:)=[f2 wy/dr sd jsd];
case 10,c10(i,:)=[f2 wy/dr sd jsd];
end
i=i+1;
end
end
% 输出外槽轮机构运动参数
['轮槽数z=4']
[' 销轮转角',' 槽轮角位移',' 角速度',' 角加速度']
% 矩阵c(:,j)表示第j列的各行元素
[c4(:,1),c4(:,2),c4(:,3),c4(:,4)]
['轮槽数z=6']
[' 销轮转角',' 槽轮角位移',' 角速度',' 角加速度']
% 矩阵c(:,j)表示第j列的各行元素
[c6(:,1),c6(:,2),c6(:,3),c6(:,4)]
['轮槽数z=8']
[' 销轮转角',' 槽轮角位移',' 角速度',' 角加速度']
% 矩阵c(:,j)表示第j列的各行元素
[c8(:,1),c8(:,2),c8(:,3),c8(:,4)]
['轮槽数z=10']
[' 销轮转角',' 槽轮角位移',' 角速度',' 角加速度']
% 矩阵c(:,j)表示第j列的各行元素
[c10(:,1),c10(:,2),c10(:,3),c10(:,4)]
%
% 绘制槽轮机构运动参数曲线
figure(1); % 生成槽轮运动线图窗口
subplot(2,2,1); % 选择第1个子窗口plot(c4(:,1),c4(:,3),c4(:,1),c4(:,4)) % 绘制z= 4的线图
title('\bf 外槽轮槽数z=4') % 标注子窗口名称axis([-pi/4/dr pi/4/dr -6 6]) % 定义坐标轴范围
grid % 栅格线
text(-2,4.2,'\bf \epsilon/\omega^{2}') % 标注类角加速度线图text(20,1.6,'\bf \omega/\omega') % 标注类角速度线图ylabel('\bf 槽轮运动线图') % 定义纵坐标轴名称%
subplot(2,2,2); % 选择第2个子窗口plot(c6(:,1),c6(:,3),c6(:,1),c6(:,4)) % 绘制z= 6的线图
title('\bf 外槽轮槽数z=6')
axis([-pi/3/dr pi/3/dr -1.5 1.5])
grid
text(10,-0.7,'\bf \epsilon/\omega^{2}')
text(30,0.7,'\bf \omega/\omega')
ylabel('\bf 槽轮运动线图')
%
subplot(2,2,3); % 选择第3个子窗口plot(c8(:,1),c8(:,3),c8(:,1),c8(:,4)) % 绘制z= 8的线图
title('\bf 外槽轮槽数z=8')
axis([-3*pi/8/dr 3*pi/8/dr -0.8 0.8])
grid
text(12,-0.3,'\bf \epsilon/\omega^{2}')
text(40,0.4,'\bf \omega/\omega')
ylabel('\bf 槽轮运动线图')
%
subplot(2,2,4); % 选择第4个子窗口plot(c10(:,1),c10(:,3),c10(:,1),c10(:,4)) % 绘制z=10的线图
title('\bf 外槽轮槽数z=10')
axis([-2*pi/5/dr 2*pi/5/dr -0.5 0.5])
grid
text(15,-0.2,'\bf \epsilon/\omega^{2}')
text(40,0.3,'\bf \omega/\omega')
ylabel('\bf 槽轮运动线图')
%
figure(2); % 生成类线图窗口subplot(1,2,1); % 选择第1个子窗口plot(c4(:,1),c4(:,3),c6(:,1),c6(:,3),c8(:,1),c8(:,3),c10(:,1),c10(:,3))
title('\bf \omega/\omega')
axis([-f20/dr f20/dr -0.1 2.5])
grid
text(-10,0.35,'z=10')
text(-8,0.7,'z=8')
text(-8,1.1,'z=6')
text(10,2.1,'z=4')
ylabel('\bf 槽轮类角速度线图')
%
subplot(1,2,2); % 选择第2个子窗口plot(c4(:,1),c4(:,4),c6(:,1),c6(:,4),c8(:,1),c8(:,4),c10(:,1),c10(:,4))
title('\bf \epsilon/\omega^{2}')
axis([-f20/dr f20/dr -5.5 5.5])
grid
text(-50,0.2,'z=10')
text(-30,0.9,'z=8')
text(-25,1.6,'z=6')
text(0,3.5,'z=4')
ylabel('\bf 槽轮类角加速度线图')。