2.状态方程的解
浙大控制考研-现代控制理论(浙大)第二章
1 A2t 2 2!
1 k
Aktk
)
b0
t 0 x(0) b0
x(t) (I At 1 A2t 2 1 Akt k )x(0)
2!
k
eAt I At 1 A2t 2 1 Akt k
2!
k
矩阵指数函数
Φ(t) 状态转移矩阵
x(t) eAtx(0) 描述了状态向量由初始状态x(0)向任意时 刻状态 x(t)转移的内在特性。
eAt I At 1 A2t 2 1 Akt k
2!
k
1)根据状态转移矩阵的定义求解:
eAt I At 1 A2t 2 1 Akt k
2!
k!
对所有有限的t值来说,这个无穷级数都是收敛的 。
求出的解不是解析形式,适合于计算机求解。
例:求解系统状态方程 解:
x1
x2
0 0
-11
6
-6 -11 5
试计算状态转移矩阵 eAt .
解: 1) 特征值
1 1
I A 6 -11 6 1 2 3 0
6 11 5
1 1,2 2,3 3
2) 计算特征向量:
1 1 1 p1 0, p2 2, p3 6
1 4 9
3) 构造变换阵P:
1 1 1 P 0 2 6
(A B)3 A3 B3 3A2B 3AB 2
(9) x Px Φ(t) P-1Φ(t)P P-1eAtP
证明:非奇异线性变换
x Px
n n非奇异矩阵 另一组状态变量
x Px
x P1AP x x(t) eP1AP x(0)
x Ax APx 新的系统矩阵 新的状态转移矩阵
Ax
eAt x(0) Φ(t)x(0)
状态方程的时域解法
状态方程的时域解法
使得
(1) (t)=X0 (2) φ(Βιβλιοθήκη ) Aφ t Bw t
t t0 , t2
成立,则函数()称为状态方程的解。 显然,解的定义只为方程的解加了一定的约 束,而对如何找到解并未作任何限制。于是, 我们可以通过多种途径来找解,设法构造一 个解就是途径之一。
状态方程的时域解法
在具体讨论构造一个解之前,我们先参照指 数函数 e 1 at 1 at 1 at , 1 at
at 2 3 k
2!
3!
k 0
k!
定义一个矩阵指数函数
1 1 2 3 e 1 At At At , 2! 3!
状态方程的时域解法线性定常网络的状态方程是一阶线性常微分方程组一个方程的解是有明确定义的
状态方程的时域解法
状态方程的时域解法
线性定常网络的状态方程是一阶线性常微分 方程组,一个方程的解是有明确定义的。 对状态方程
x(t ) Ax t Bw t , x t0 X0
来说,解的定义是:假定t[t0,t2],w() 是已知的向量函数,若能找到一个向量函 数(),且t[t0,t2], (t)Rn,
At
1 k At k 0 k !
等号右边对有限的t是收敛的。
状态方程的时域解法
函数eAt有下列几个主要性质:
(1)当t=0,eAt=1 (2) dt e At Ae At e At A
A t1 t2 (3)对有限的t1和t2, e
d
e e
At1 At2
现代控制理论课后题及答案
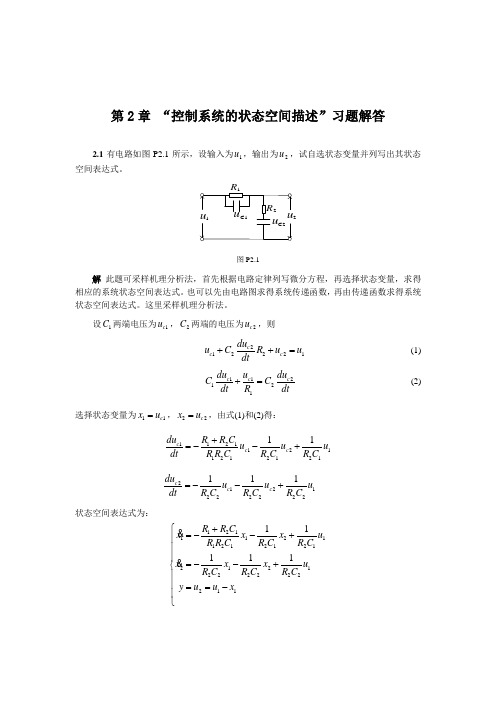
第2章 “控制系统的状态空间描述”习题解答2.1有电路如图P2.1所示,设输入为1u ,输出为2u ,试自选状态变量并列写出其状态空间表达式。
图P2.1解 此题可采样机理分析法,首先根据电路定律列写微分方程,再选择状态变量,求得相应的系统状态空间表达式。
也可以先由电路图求得系统传递函数,再由传递函数求得系统状态空间表达式。
这里采样机理分析法。
设1C 两端电压为1c u ,2C 两端的电压为2c u ,则212221c c c du u C R u u dt++= (1) 112121c c c du u duC C dt R dt+= (2) 选择状态变量为11c x u =,22c x u =,由式(1)和(2)得:1121121121212111c c c du R R C u u u dt R R C R C R C +=--+ 2121222222111c c c du u u u dt R C R C R C =--+ 状态空间表达式为:12111211212121212122222221111111R R C x x x u R R C R C R C x x x u R C R C R C y u u x +⎧=--+⎪⎪⎪=--+⎨⎪⎪==-⎪⎩即: 12121121211112222222211111R R C R C R R C R C x x u x x R C R C R C +⎡⎤⎡⎤-⎢⎥⎢⎥⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦--⎢⎥⎢⎥⎣⎦⎣⎦[]11210x y u x ⎡⎤=-+⎢⎥⎣⎦2.2 建立图P22所示系统的状态空间表达式。
1图P2.2解 这是一个物理系统,采用机理分析法求状态空间表达式会更为方便。
令()f t 为输入量,即u f =,1M ,2M 的位移量1y ,2y 为输出量, 选择状态变量1x =1y ,2x = 2y ,3x =1dy dt,24dyx dt =。
现代控制理论第二章

= α n −1 (t ) An −1 + α n − 2 (t ) An − 2 + ⋯ + α1 (t ) A + α 0 (t ) I
【例2-5】见板书
(3)α i (t )的计算公式 A的特征值互异时 α 0 (t ) 1 λ1 α1 (t ) 1 λ2 ⋮ = ⋮ ⋮ α (t ) 1 λ n −1 n
λ λ λ
பைடு நூலகம்
2 1 2 2
⋮
2 n
⋯ λ e λ1t λ2 t ⋯ λ e ⋮ ⋮ λn t n −1 ⋯ λn e
At
2.变换A为约旦标准型 (1)A特征根互异 Λ = T −1 AT 有
例2-2 ,同例2-1
e At = Te ΛtT −1
(2)A特征值有重根
J = T AT e At = Te JtT −1
0 1 0 [例2 - 3]已知A = 0 0 1 , 求e At 2 - 5 4
若
σ ω A= −ω σ
则
cos ωt sin ωt σt e = Φ(t ) = e − sin ωt cos ωt
At
2.2.4 计算
1.根据 e At 或 Φ (t ) 的定义直接计算
1 2 2 1 33 1 n n e = I + At + A t + A t ⋯ A t + ⋯ 2! 3! k! 1 0 [例2 - 1]已知A = , 求e At − 2 − 3
线性离散系统状态方程的解
因此,有
(k) Gk Z 1[(zI - G)1]
1 3
-
4(-0.2)k 0.8(-0.2)k
- (-0.8)k 0.8(-0.8)k
5(-0.2)k - 5(-0.8)k
-
(-0.2)k
4(-0.8)k
Z变换法(6/7)—例3-14
由Z变换,有 u(k)=1 U(z)=z/(z-1)
比较连续系统与离散系统状态方程的解的表示形式:
➢ 连续系统
t
x(t) (t)x0
(t )Bu( )d
0
➢ 离散系统
k 1
x(k) Φ(k)x(0) Φ(k - j -1)Hu( j) j0
初始时刻后输入的 初始状态 影响,为脉冲响应函 的影响 数与输入的卷积
对上述离散系统状态方程的求解公式,有如下几点说明:
线性时变离散系统状态方程的解(5/6)
由上述状态方程解公式可知,线性时变离散系统的状态方程 的解也包括两项。其中, ➢ 第1项是由初始状态激励的,为零输入响应,描述了输入向 量为零时系统的自由运动。
➢ 第2项对应初始状态为零时,由输入向量激励的响应,称为 强迫运动或受控运动。
➢ 线性时变离散系统的运动状态取决于状态转移矩阵(k ,k0),而又是由(k ,k0)唯一决定的。
k 1
Z -1{( zI - G)-1 HU (z)} Z -1{( zI - G)-1 z z-1HU (z)} Gk- j-1Hu( j) j0
离散卷积
Z变换法(3/7)—例3-14
因此,离散系统的状态方程的解为:
k 1
x(k) Gkx(0) Gk j1Hu( j)
j0
该表达式与前面递法求解结果一致。
第2章 状态空间表达式求解

1 T 2. 若A能通过非奇异变换予以对角线化,即 AT
则
e1t e At (t ) T 0
e2t
0 T 1 n t e
证明:根据定义式
A2t 2 A3t 3 Ak t k e I At 2! 3! k 0 k! At
A2t 2 A3t 3 ( I At ) A e At A 信息与控制工程学院 2! 3!
5. 性质五
设有nxn矩阵A和B,当且仅当AB=BA 时,有eAteBt
= e(A+B)t ,而当AB≠BA 时,则eAteBt ≠ e(A+B)t 。
证明:根据定义式
e ( A B ) t ( A B ) 2 2 ( A B )3 3 I ( A B )t t t 2! 3! A2t 2 ABt2 BAt2 B 2t 2 I ( A B )t ( ) 2! 2! 2! 2! A3t 3 A2 Bt3 ABAt3 AB2t 3 BA2t 3 BABt3 ( 3! 3! 3! 3! 3! 3! B 2 At3 B 3t 3 ) 3! 3!
2 2 1 t 2! 1 1t 1 k k 2t At e At k 0 k! nt 1 0 0 k k 1 t k! k 0 0 2 2 2t 2!
(t )( ) (t ) (t )( t ) (t t ) I ( )(t ) ( t )
( t )(t ) ( t t ) I
从而证明了(t)与(-t)互为逆
信息与控制工程学院
4. 性质四
状态空间表达式解
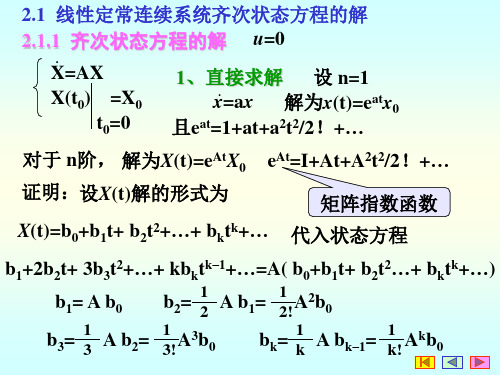
2.1.1 齐次状态方程的解 u=0
X·=AX
1、直接求解 设 n=1
X(t0) =X0
x·=ax 解为x(t)=eatx0
t0=0 且eat=1+at+a2t2/2!+…
对于 n阶, 解为X(t)=eAtX0 eAt=I+At+A2t2/2!+…
证明:设X(t)解的形式为
=(I+At1+A2t12/2!+…) (I+At2+A2t22/2!+…) = (t1) (t2)
1、状态转移矩阵的性质:设t0=0 (4)[(t)]–1= (–t)
证明:由 (1)(0)=I (3) (t1+t2)= (t1) (t2) 得 (t–t)= (t) (–t)=I
(–t +t)= (–t) (t) =I 所以 [(t)]–1= (–t) (5) (t2– t1) (t1– t0) = (t2– t0)
0 0 0… 0 0 0…
e1t tm–1/(m–1)! e1t tm–2/(m–2)!
Q–1 te1t e1t
以A有三重特征值为例进行证明
1 1 0 J= Q–1AQ= 0 1 1
0 0 1
证明 eAt=I+At+A2t2/2!+… 则 Q–1eAtQ=Q–1IQ+ Q–1 AtQ+ Q–1 A2t2/2!Q+… =I+ Jt+ J2t2/2!+… eAt=Q(I+ Jt+ J2t2/2!+…) Q–1
1 k!
Akb0
2.1.1 齐次状态方程的解
现代控制理论--3控制系统的状态方程求解

7
小结:
1.齐次状态方程的解表示了系统在初始条件作用 下的自由运动,又称为零输入解;
2.系统状态的变化实质上是从初始状态开始的状
态转移,而转移规律取决于 eAt ,eA(t-t0) 故称其
为状态转移矩阵.一般用
x
(t) eAt (t t0) eA(tt0)
来表示。 x 0
2 ! 3 !
AA2t1A3t2L 2!
A(I At 1 A2t2 L ) 2!
AeAt eAt A
13
所以当 Φ(t)=eAt时, &(t)A(t) 又因为 Φ(t)=eAt (t=0时) eA0 =I+A0+...=I 所以 Φ(0)=I 故 eAt 是状态转移矩阵Φ(t)
(2)状态转移矩阵Φ(t)是A阵同阶的方阵,其元 素均为时间函数.
sX(s)-x0=AX(s)+BU(s)
即
X(s)=(sI-A)-1[x0+BU(s)]
其中X(s)和U(s)分别为x(t)和u(t)的拉氏变换。
对上式两边取拉氏反变换,并利用卷积分公式,则有
x ( t ) L 1 ( s A ) I 1 x 0 L 1 ( s A ) I 1 B ( s )U
1 0 3x1u
试求:x(0)=0,u(t)=1(t) 时的状态解。
解:1.求 eAt : 由前例得:
eAt
2et 2et
e2t 2e2t
et e2t et 2e2t
25
2. 求x(t)
x(t)eA tx00 teA (t )B u ()d
t2 e (t )e 2 (t ) e (t ) e 2 (t ) 0
由于状态空间表达式由两部分组成,即 x& Ax Bu y Cx Du
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Chapter2状态方程的解我们要解决的问题是:在系统初始时刻0t t =时,初始状态为00)(x t x =的条件下,对该系统施加控制)(t u ,求出系统状态)(t x 的变化,即求解非齐次方程(0)(≠t u )初值问题的解: 000)()()()()()(t t x t x t u t B t x t A t x≥=+=&或者在系统不加控制)(t u ,(0)(=t u 称为自由系统)的条件下,求出初值)(0t x 对系统状态)(t x 的影响,即求解齐次方程初值问题的解:000)(),()()(t t x t x t x t A t x ≥==&⇒⎩⎨⎧离散连续线性定常⇒⎩⎨⎧离散连续线性时变⎩⎨⎧⨯∆⇒⎩⎨⎧⨯∆数值解解析解非齐次数值解解析解齐次 2.1 线性定常系统状态方程的解2.1.1 n 阶、线性、定常(无关与时间t A )连续系统齐次状态方程的解我们知道:常系数线性微分方程(标量方程))()(t ax t x=&,0)0(x x =,0≥t 其解为 000!)(x k t a x e t x k kk at∑∞===对齐次状态方程(矩阵方程) )()(t Ax t x=&,0)0(x x =,0≥t 很自然,仿照常系数线性微分方程,可得到n 阶线性、定常、连续系统齐次(0)(=t u )状态方程的解 000!)(x k t A x e t x k kk At∑∞=== 定义矩阵指数:k k k k k Att A k t A At I k t A e!121!220++++=≡∑∞=Λ,它仍是一个矩阵。
若初始时间为0t ,则状态方程的解为 0000)(!)()(0x k t t A x et x k kk t t A ∑∞=--==∑∞=--=00)(!)(0k kk t t A k t t A e称为定常(连续)系统的状态转移矩阵。
)(0t t A e -物理意义:将系统从初始状态)(0t x 转移到(时刻t 的)状态)(t x 。
2.1.2 矩阵指数At e 的性质(1)])[(11---=AsILe At称为频域求法或叫Laplace变换法;(2)Ie=0;(3))(ττ+=⋅t AAAt eee;(4)AtAt ee--=1)(;(5)若矩阵BA、满足交换律BAAB=,则有t BABtAt eee)(+=(A、B可交换的充要条件是AB为反称矩阵,AA='称为对称矩阵,AA-='称为反称矩阵)对称矩阵⎪⎪⎪⎭⎫⎝⎛==nnnnjiijaaaaaaΛMOMΛ1111;反称矩阵⎪⎪⎪⎭⎫⎝⎛-=-=nnnnjiijaaaaaaΛMOMΛ1111(6)kAtkAt ee=)(;(7)AeAeedtdAtAtAt==;(8)设P是与A同阶的非奇异矩阵,则有PePe AtAPtP11-=-;图2-1 状态的传递性P31(9)传递性:对任意满足12ttt>>,有)()()(02112ttAttAttA eee---=⋅。
这表明状态轨线由t时刻的)(t x转移到2t时刻的)(2t x等于由t时刻的)(t x转移到1t时刻的)(1t x,再由1t时刻的)(1t x转移到2t时刻的)(2t x(参见图2-1),故称)(0ttAe-为状态转移矩阵。
这意味着,状态方程的解可以任意分段求取,这就有可能避开对初始条件的处理,这是动态系统用状态空间法的又一优点。
而在经典控制理论中,用高阶微分方程描述的系统,求解时对初始条件的处理是非常麻烦的,一般都假设0)0()(==xt x去计算系统的响应。
2.1.3 矩阵指数At e的计算方法(1)定义法求Ate k kkkkAt tAktAAtIktAe!121!22++++==∑∞=Λ这种方法很适合计算机求(级数)数值解,由于!1k 的存在,可以取到任意精度,但不易求解析解,只有在A 是“幂零矩阵”的情况下才可求得解析解。
幂零矩阵:存在某一正整数k ,使得0=k A 称为k 次“幂零矩阵”。
A 为幂零矩阵的“充要条件”是A 的所有特征值为零:A AX λ=,0=i λ n i ,,2,1Λ=特例:A 为数字矩阵,即I A λλλ=⎪⎪⎪⎭⎫⎝⎛=O31P 例2-1:⎪⎪⎪⎭⎫⎝⎛=000100010A ,⎪⎪⎪⎭⎫ ⎝⎛=0000001002A ,03=A ,3次“幂零矩阵”⎪⎪⎪⎭⎫⎝⎛=++=100102/1!21222t t t t A At I e At(2) Laplace 法求At e])[(11---=A sI L e At ,但当阶数较高时,求解1)(--A sI 较困难。
下面介绍法捷耶夫算法,给出递推公式。
nn n n nn n n b a s a s a s B s B s B s B A sI A sI A sI ++++++++=--=-------111122111)()(ΛΛ 03221)(11111=⎪⎩⎪⎨⎧=+==-=⇒=+--n k k k k k B nk Ia AB B nk AB tr ka I B 此时必有,,,,ΛΛ 计算顺序是:I B =1 trA a -=⇒1I a A B 12+=⇒ )(21)(211222A a A tr AB tr a +-=-=⇒I a A a A I a AB B 212223++=+=⇒ )(31)(31221333A a A a A tr AB tr a ++-=-=⇒01=⇒+n B Λ注意:tr 为矩阵之迹,即矩阵对角线元素之和;当01≠+n B 时,计算必有误。
例2-2 (32P )已知⎪⎪⎪⎭⎫ ⎝⎛=000100010A ,求])[(11---=A sI L e At 。
解:用法捷耶夫法计算nn n n nn n n a s a s a s B s B s B s B A sI ++++++++=-------111122111)(ΛΛ取I B =1,0)()(11=-=-=A tr AB tr aA I a AB B =+=112,000000010021)(2122=⎪⎪⎪⎭⎫⎝⎛-=-=tr AB tr a⎪⎪⎪⎭⎫ ⎝⎛=+=000000100223I a AB B ,0)(3133=-=AB tr a ; 0334=+=I a AB B⎪⎪⎪⎪⎪⎪⎭⎫⎝⎛=⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧⎪⎪⎪⎭⎫ ⎝⎛+⎪⎪⎪⎭⎫ ⎝⎛+⎪⎪⎪⎭⎫ ⎝⎛=--s s s s s ss s s A sI 1001101110000001000001000101000100011)(232231⎪⎪⎪⎪⎪⎭⎫⎝⎛=⎪⎪⎪⎪⎪⎪⎭⎫ ⎝⎛=-=---10010211100110111])[(2232111t t t s ss s s sL A sI L e At ,结果相同。
(3) Hamilton Cayley —(凯莱—哈密尔顿)法求At e将At e 展开成矩阵A 的多项式,然后根据A 的特征值情况求出展开系数。
11101)()()()(---=+++==∑n n k n k k AtA t A t I t A t eββββΛ)(t k β——110-=n i ,,,Λ是待定系数,问题的关键是求出待定系数)(t k β。
(3a )先求出A 的特征值,当A 有n 个不同特征值n λλλ,,,Λ21情况下,可以用如下方法求展开系数)(t k β n i t ekin k k ti ,,,Λ21)(1==∑-=λβλ写成分列式:⎪⎪⎩⎪⎪⎨⎧=+++==+++==+++=------ni t t t e i t t t ei t t t e n n n n t n n t n n t n )()()(2)()()(1)()()(111011212011111021βλβλββλβλββλβλβλλλΛMΛΛ这里共有n 个方程,可以唯一确定n 个待定系数)(t k β。
(3b )先求出A 的特征值,当A 有p 个单特征值p λλ,,...1,r 个重特征值,1+p λr p +λ,...,重数分别为r m m m ,,,...21情况下,可用如下方法求系数)(t k β48476p p λλ...1,4484476111...m p p ++λλ,┅,4484476rm r p r p ++λλ... ,n m m m p r =+++ (21)对单根情况,按(3a )方法求解待定系数)(t k β。
但在重根情况下,我们不能得到相应个数的独立方程,不能求出待定系数)(t k β。
先固定一个j m 重特征值j λ,j λ满足的方程kj n k k tt ej λβλ∑-==1)(有一个,再对j λ求1-j m 次导数得到1-j m 个方程,这样一共得到j m 个独立的方程,(必须先求对j λ求导,再代入j λ的值)这样又可以唯一的求出待定系数)(t k β。
例2-3 (37P ) Ate A ,求⎪⎪⎭⎫ ⎝⎛--=2110 解:先求A 的特征值 0)1(1221122=+=++=+-=-λλλλλλA I ,121-=,λtt t tt t te t te t t t d dd de e t t e t t t t e ---=⇒=⇒+=+=⇒=-⇒+=)()()]()([)1()()()()()(1111011010110111βββλβλλββββλβλλλ t t t Ate t t t t e t t t e t t A t I t e ---⎪⎪⎭⎫ ⎝⎛--+==⎪⎪⎭⎫ ⎝⎛--+⎪⎪⎭⎫ ⎝⎛++=+=11201001)()(10ββ (4) 特征值与特征向量法求At e (略,自己看书)2.1.4 线性、定常、连续、非齐次(0)(≠t u )状态方程的解前面已经求出齐次方程)()(t x A t x⋅=&,00)(x t x =,0t t ≥的解为 0000)(!)()(0x k t t A x et x k kk t t A ∑∞=--==对非齐次状态方程:000)()()()(t t x t x t Bu t Ax t x ≥=+=,&将上述状态方程左乘At e - )()()(t Bu e t Ax e t xe At At At ---+=& 移项得 )]([)()()()()(t x e dtd t x dt de dt t dx et x A et x et Bu eAt At AtAtAtAt------=⋅+⋅=-=& 积分、移项并左乘At e ,得非齐次状态方程的解为⎰--+=tt A t t A d Bu e x et x 0)(0)()()(0τττ物理意义: 自由系统(只有初条件作用)的解+强迫项)(t u 作用的解。