柔性臂振动系统角速度反馈控制的最优指数衰减率问题[1]
压电柔性臂的ARMAX模型辨识降阶及最优极点移动控制

压电柔性臂的ARMAX模型辨识降阶及最优极点移动控制作者:娄军强周优鹏廖江江李国平魏燕定来源:《振动工程学报》2018年第01期摘要:研究了压电柔性臂的系统模型辨识和振动主动抑制问题。
基于自回归滑动平均模型(ARMAX,Auto-Re-gressive Moving Average Exogenous)确立了系统辨识模型,且其辨识精度高达97.9%,并采用平衡降阶法对高阶的辨识模型进行降阶,得到低阶模型,通过多频激励实验证实了降阶模型与实际结构具有较高的吻合度。
针对柔性臂的振动控制,提出了一种基于线性二次型(Linear Quadratic,LQ)最优极点移动控制法,从求逆的角度,通过移动系统极点来确定LQ的最优状态加权矩阵Q,该方法简单有效地解决了状态加权矩阵Q和输入加权矩阵R的选择问题,具有明显的物理工程意义。
试验结果证实了ARMAX模型对于压电柔性臂系统模型辨识的适用性及平衡降阶方法对模型降阶的可行性,并验证了线性二次型最优极点移动策略对柔性臂振动控制的有效性。
关键词:振动控制;系统辨识;压电柔性臂;最优极点移动控制;平衡降阶;中图分类号:TB535;TP24 文献标志码:A 文章编号:1004-4523(2018)01-0132-08DOI:10.16385/ki.issn.1004-4523.2018.01.016引言随着空间技术的发展和制造业对轻质高速机構的要求不断提高,具有质量轻、能耗低及移动灵活方便等优点的柔性机械臂被应用到诸多领域。
但是在外界干扰下,柔性臂极易引起持续的弹性振动,这严重影响了系统的定位精度和稳定性。
近年来,以压电材料为代表的智能材料具有易与柔性结构集成为一体的优势,常用于柔性臂的振动主动控制研究中。
系统动力学建模和控制算法设计是压电柔性结构振动主动控制技术中的两个基本问题,引起了国内外研究学者的广泛关注。
建立精确的系统动力学模型是设计高效控制算法的前提。
基于实验数据的系统辨识法可以避免复杂的数学计算和理想化的假设,并很好地诠释系统动力学特性,是一种精度更高、效果更好的建模方法。
基于多种群遗传算法的柔性臂振动控制参数优化设计
X(, " Q$ ! Y,
"
i+3参数优化方案& 利用多个种群同时进行优化选
"H$
择& 系统最优参数是多个种群协调优化的综合结果& 解决常规遗传算法存在的未成熟收敛问题*H+( 利用
式中系! /统9势为能滑仅块考质虑量柔( 性臂变形时产生的弹性势能&
'JX=J9 进行仿真研究& 比较多种群遗传算法与常规遗 为!
收稿日期 !"#%E#!E#" 基金项目 国家自然科学基金资助项目"H#&"H%%%$# 教育部博士点基金"!"#!""?H#!""#&$# 江苏省科技计划项目
"\2!"#%"!FE"$$# 江苏高校优势学科建设工程资助项目 作者简介 鞠锦勇"#??#%$& 男& 硕士研究生& 研究方向为机械电子工程( -EIJB=! AAQ#??#K#!$:L<I(
传算法的优化过程& 证明该方法的有效性( 利用(3] ('6 建立柔性臂物理模型作为被控对象*$+& 验证了
/ [ ] # ?9
(! +" ,& Q$ !
2W !
"9 P9 X
"
(,!
Y,
"$$
优化参数对柔性臂振动抑制的有效性( #"移动柔性操作臂建模分析
外力包括电机驱动滑块运动的力L" Q$ 以及滑块 与导轨之间的摩擦力& 系统的虚功为!
的偏差& 构建适应度函数(
空间柔性结构振动的直接速度反馈控制

空间柔性结构振动的直接速度反馈控制
郭铁能;周舟;陆秋海;任革学
【期刊名称】《机械强度》
【年(卷),期】2003(25)5
【摘要】针对空间柔性结构的低频振动问题 ,采用轻质的直流电机和拉索作为控制器 ,通过传感器和控制器的共位布局方式 ,建立柔性结构的直接速度反馈主动阻尼控制方案。
该方案无需柔性结构的系统控制模型 ,只需调整速度反馈增益 ,即可以达到控制结构振动的目的。
为验证该方案的有效性 ,文中对一含中心刚体的柔性卫星缩尺模型进行数值仿真 ,并采用气浮台模拟太空无重力环境 ,对该模型进行控制实验。
仿真和实验的结果表明 ,该控制方案对空间柔性结构的低频大幅振动有很好的控制效果。
【总页数】5页(P476-480)
【关键词】柔性空间结构;阻尼;速度反馈;振动控制;气浮台;直流电机;拉索;控制器;传感器
【作者】郭铁能;周舟;陆秋海;任革学
【作者单位】清华大学工程力学系
【正文语种】中文
【中图分类】V414;TB535
【相关文献】
1.结构振动的速度加速度反馈控制律 [J], 刘炎海;张俊平
2.参数不确定与有界干扰自由飘浮柔性空间机械臂基于速度观测器的奇异摄动鲁棒控制及振动抑制 [J], 于潇雁;陈力
3.弹性空间结构的最优直接反馈控制设计 [J], 杨世才;徐博侯;鲍荣浩
4.基于加速度测量的柔性智能桁架结构振动主动控制实验研究 [J], 刘福强;岳林;张令弥
5.柔性臂振动系统角速度反馈控制的最优指数衰减率问题 [J], 于景元;王耀庭;李胜家
因版权原因,仅展示原文概要,查看原文内容请购买。
组合柔性机械臂动力学特性与振动抑制性能的研究的开题报告

组合柔性机械臂动力学特性与振动抑制性能的研究的开题报告一、研究背景柔性机械臂具有结构灵活、可冗余、质量轻等优点,在机器人领域中具有广泛应用前景。
然而,在实际应用过程中,柔性机械臂所带来的振动问题给控制系统带来了很大的挑战。
因此,研究柔性机械臂的动力学特性和振动抑制性能,对其优化设计和精确控制具有重要意义。
二、研究目的本文旨在:1. 深入探究柔性机械臂的动力学特性,分析和建立柔性机械臂的动力学模型。
2. 研究柔性机械臂的振动抑制性能,探究影响柔性机械臂振动的因素及其对振动抑制的影响。
3. 组合动力学与振动抑制分析,提出有效的柔性机械臂振动抑制方法并进行实验验证。
三、研究内容本文将围绕柔性机械臂的动力学特性和振动抑制性能展开研究工作,具体包括以下内容:1. 对柔性机械臂的动力学特性进行深入分析,在建立动力学模型的基础上模拟分析柔性机械臂的运动学和动力学特性。
2. 探究柔性机械臂振动的原因,包括结构刚度、质量分布等对柔性机械臂振动的影响,并对振动抑制技术进行综述。
3. 基于系统鲁棒控制的方法,提出柔性机械臂的振动抑制控制方法。
设计集中式控制器并验证其有效性。
4. 通过实验验证柔性机械臂的动力学特性和振动抑制性能,并与其他已有的方法进行比较,以评估所提出的方法的有效性和实用性。
四、研究意义本文研究的柔性机械臂动力学特性和振动抑制性能对提升柔性机械臂的精度和控制能力具有重要意义,具体有以下几点:1. 深入研究和掌握柔性机械臂的动力学特性和振动抑制技术,有助于优化柔性机械臂设计,提高其控制精度。
2. 所提出的柔性机械臂振动抑制控制方法,为柔性机械臂的实际应用提供了一种新的控制途径,具有重要的理论和实用价值。
3. 相关研究成果可以为机器人领域中的其他柔性结构的动力学分析和振动抑制技术提供有益借鉴和参考。
五、研究方法和技术路线本研究主要采用理论分析和实验验证相结合的方法,具体技术路线如下:1. 对柔性机械臂的动力学特性和振动抑制技术进行综述和分析,总结相关理论和方法。
柔性机械臂逆动力学问题的分析和求解

图1 是一双连杆柔性机械臂 , 两臂间关 节电机质量 为 m , 上臂端部集 中质量为 m.两连杆质量和抗 弯刚度分别为 和 e ,
分 。本文试 图将这两部分分 离 , 分别讨 论其 逆动力学特性 , 并 以此来分析整体 系统 的逆动力学 问题 。
收稿 日期 :0 0 0 — 2 2 1- 2 1 作者简介 : 盂庆元( 9 6 )男 , 津西青人 , 18 一 , 天 学生, 大学本科 , 研究 方 向为机械工程及 自动化( 数控 方向 ) 。
E up n Ma u a t n e h o o y No5, 0 0 q i me t n f er g T c n lg . 2 1 i
柔性机械臂逆动力学 问题 的分析和 求解
孟 庆 元
( 津 工 业 大学 . 津 3 0 6 ) 天 天 0 10
摘 要 : 用割线 坐标 系对机械臂 的运动进行 了描述 . 采 并分快变( 振动 ) 和慢 变两方面进行 逆动力学问题 的分析 与求解。在对快 变部分
文 章 编 号 :6 2 5 5 2 1 0 - 0 6 0 1 7 — 4 X( 0 0)5- 1 — 2 0
双连杆柔性机械臂 , 是柔性系统 中最 为典 型的例 子之一 。
鸩 , 和巩 , 两连杆的长度分别为 厶 和 £, 和 为两关节 :
电机 提 供 的力 矩 。
在实践中 , 对其端点 的运 动实现精确 的控制 的最重要 因素 , 是
1 6
《 备制 造 技术 )O O年 第 5期 装 2L
稳 定 , 解发 散 , 其 即双 连杆 柔性臂 在 这种情 况下 , 振动 问题 其
力学方 程式( ) , 方 程中 的弹性坐标 和力矩 进行求 解 , 2中 对 一
弹性关节柔性操作臂的频率及振型特性分析
显的影响,将关节视为理想刚性约束会产生明显的误差;由灵敏度分析可知,线性约束对频率的影响大于
扭转约束,且高阶频率段表现较为明显;扭转约束对振型的影响比线性约束更为显著,随着扭转约束的增
0暋 引 言
柔 性 操 作 臂 具 有 能 耗 低 、轻 质 、操 作 灵 活 等 特
点,广 泛 应 用 在 航 空 航 天、微 操 作 机 器 人、精 密 制 造加工等领域 。 [1飊2] 与此同时,由于柔性操 作 臂 的 模态较低,故在执 行 任 务 的 过 程 中 极 易 出 现 低 阶
收稿日期:2014 09 09
(6)
根据欧拉 伯努利理论,忽略转动惯量和剪切
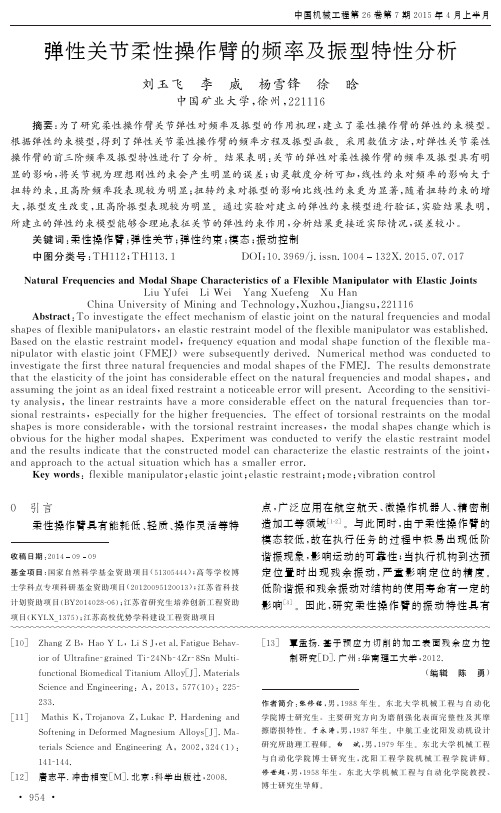
变 形 的 影 响 ,取 柔 性 臂 任 一 微 元 进 行 受 力 分 析 ,如
图3所示。
图1暋 柔性操作臂系统示意图
图2暋 柔性操作臂系统的弹性约束模型
在运动 基 的 驱 动 下,柔 性 臂 运 动 过 程 中 产 生
弯曲变形,变形的剪力 Q 和弯矩 M 分别为
· 954 ·
作者简介:张修铭,男,1988 年 生。 东 北 大 学 机 械 工 程 与 自 动 化 学院博士研究生。主要研究方向为磨削强化表面完整性及其摩 擦磨损特性。于永涛,男,1987年 生。 中 航 工 业 沈 阳 发 动 机 设 计 研究所助理工程师。白暋斌,男,1979 年 生。 东 北 大 学 机 械 工 程 与自动化学 院 博 士 研 究 生,沈 阳 工 程 学 院 机 械 工 程 学 院 讲 师。 修世超,男,1958年生。东 北 大 学 机 械 工 程 与 自 动 化 学 院 教 授、 博士研究生导师。
柔性机械臂振动控制
柔性机械臂振动控制1引言随着人类科技水平的不断进步,机器人的应用越来越广泛。
新一代机器人正向着高速化、精密化和轻型化的方向飞速发展, 传统的将机器人视为刚体系统的分析与设计方法已显得愈加不适用。
近二十年,计及构件及关节弹性影响的柔性机器人动力学分析与振动控制问题已受到国内外学者的广泛关注[1]。
在工业、医疗、军事等领域内,它能够代替人类完成大量重复、机械的工作。
近些年,人类对外太空的探索不断深入,空间机器人因为具有较强的恶劣环境的适应能力,且完成任务的精确程度较高,正受到越来越多科研机构的关注和重视。
机械臂作为机器人的重要组成部分,其未来的发展趋势是高速、高精度和轻型化。
操作灵活、性能稳定的柔性机械臂,无论在航天领域还是在工业领域都具有很高的应用价值。
柔性机械臂系统的动力学特点是大范围刚体运动的同时,伴随着柔性臂杆的小幅弹性振动。
柔性臂杆的弹性振动将极大地影响机械臂末端的定位精度,甚至影响机器人系统的稳定性。
2研究背景及意义随着工业自动化程度的提高,工业机器人的应用范围也从传统的汽车制造领域推广到了机械加工业、电子电气业、食品工业、物流、医疗等领域,机器人的科,类包括了焊接机器人、喷涂机器人、洁净机器人和医疗机器人等。
瑞典ABB公司制造的“IRB5400-12”喷涂机器人(图1所示),具有6个自由度,工作时关节轴的最大转速137o/S,末端定位精度0.15mm,其性能特点是喷涂精确、工作域大、负载能力强且运行可靠性高。
日本FANUC公司制造的“M-10iA”工业机器人(图2所示),工作半径1420mm,重复精度士0.8mm,主要用途包括搬运、弧焊、机床上下料等。
图1 IRB“5400-12”喷漆机器人图2 “M-10iA”工业机器人日本松下公司和IRT研究院((Information and Robotics Technology)联合研制的“KAR”洗碗机辅助机器人(图3所示),臂杆上安装了18个传感器,手爪配备防滑材料,可以牢牢抓住碗碟,防止意外跌落[2]。
柔性机械手臂运动优化分析
jc v nt nw s eo e yit d c g h eat t ms A esm m ,asibeid et pi zt nf m l i ae et ef ci a sl db r u i epn y e . th a et e t l n i c ot ao r ua o bsdo i u o r v no n t l a t i u a r mi i o tn n
柔性机 械手具 有能耗低 、高的有效载荷 比、运动
MX+ X+ ( ) 。 K Ⅳ X, =Q
() 1
灵活等优点 ,但 由于柔性机械手 的柔性 所带来 的变形 和振动 ,给 柔性 机械 手 的分 析 和控 制带 来 很大 的困
难 。 目前主要研究柔性机 械手在正 、逆 动力学 、轨迹 规划 、残余振动 的抑制 、驱 动力矩 的优 化以及柔 性机 器人设计等方 面的特性 。而对这些方 面之间是 否有影 响 以及有多 大影 响 ,工作做得还 有不够 。主要从 系统
P nr a i xmu p i cp ewa ee t d t c iv p i ls lt n T e o t z t nr s l e e a p id t ev r a rt tp o t g n ma i m r il ss l ce a he e o t y n o ma ou i . h p i ai e u t w r p l t i u l o oy e t o mi o s e oh t p o v i ae t e e e t e e sa d t e c r c n s fte o t z t n s h me l a d t h f ci n s n or t e so p i ai c e . v h e h mi o Ke wo d : F e il n p ltr G o a pi z t n;Vi u r tt p y rs l xb e ma iu a o ; l b o t l mia i o r a p o oy e tl
柔性机械臂动力学建模与振动分析
柔性机械臂动力学建模与振动分析作者:邓云江来源:《中国新技术新产品》2014年第10期摘要:本文采用假设模态法和Lagrange方程建立了柔性机器人连杆的动力学模型,利用数值仿真,对比分析了截取模态的阶数对连杆振动的影响,结果表明,三阶模态截断可以得到较良好的振动响应分析结果。
仿真结果还表明,柔性机器人连杆的结构参数对系统振动的影响,适当增加连杆截面高度可以有效抑制其振动和弹性变形。
末端集中质量会对连杆振动产生较大影响。
仿真结果表明,集中质量越大,连杆振动也越剧烈。
关键词:柔性机器人连杆;动力学模型;模态截断;振动;弹性变形中图分类号:TP391 文献标志码:A柔性机器人具有操作速度快、能量消耗少、构件紧凑、载荷质量比大等优点。
但是,由于其连杆弹性变形,容易产生高频弹性振动,且其末端运动往往偏离较大。
近年来,柔性机器人连杆的弹性振动问题十分突出。
例如空间站航天器的柔性附件在展开过程中诱发的振动可使航天器的姿态失稳,为避免造成大的振动而使得展开过程达6-8小时。
柔性边杆在产生弹性振动时,能导致后续执行动作的精准度产生较大误差,从而使执行速度减慢,甚至使结构产生过早的疲劳破坏。
对柔性机器人连杆振动分析必须首先建立一个动力学模型。
在柔性多体系统动力学中,主要的建模方法有运动-弹性力学法、子结构(假设模态)法、浮动参考坐标方法、有限段法、有限元法、绝对节点坐标方程法等。
本文主要分析柔性机器人连杆的弹性振动问题,首先利用假设模态法和Lagrange方程建立单个柔性连杆的动力学方程,然后进行数值仿真,分析连杆机构参数以及末端集中质量等对其振动的影响。
1柔性连杆动力学建模平面内做回转运动的柔性机器人连杆。
设 Oxy为固连在柔性机器人连杆上的参考坐标系;l为柔性机器人连杆(梁)的长度, h为截面高度;b为截面宽度;τ为电机的驱动力矩;θ为柔性机器人连杆的关节转角。
在对柔性机器人连杆(梁)进行动力学建模时,作Euler-Bernoulli柔性梁假设:( 1 )只考虑横向振动,忽略其轴向变形和剪切变形等;( 2 )横向振动为小变形;( 3 )柔性机器人连杆(梁)的长度远大于其截面尺寸。
柔性机械臂振动的线性二次型最优控制
第3卷 第3 7 期
、 17 , . No 3 o3 .
河
北
工
业
大
学
学
报
20 0 8年 6月
Jn 0 8 u e2 0
J 0URN ^ BE 1 0F HE IUNI VERS Ty 0F T CHN0L I E 0GY
究中 [ . 2 - 4 1 本 文针对在水 平面 内转动的单杆柔性 机械臂 , 先采用假设模态法和 L gag 方程推导出柔性臂的 首 arne
动力学模 型 ; 并在此基础上给 出其面 向控制器设计 的数学 模型 ; 然后设计线性二次型最优调节器 (Q ) L R, 以达到抑制柔性臂末端残余 振动的 目的 ;最后对 柔性机械臂线性二次型最优控 制的效果进行 仿真验 证.
收稿 日期 : 0 8 1 0 20— - 02
基金项 目:天津 市高等学 校科技 发展基 金计划项 目 ( 0Z 0;2010) 2 6 Y 9 0413 0 作者简 介:李坤 (93) 18.,男 ( 汉族 ) ,硕士生 .
维普资讯 第3 期 Fra bibliotek文章 编号 :10 -3 3(0 8 30 3 .5 0 82 7 2 0 )0 .0 80
柔性机械 臂振 动的线 性二次型最优控制
李 坤 ,炱今天
( 天津工 业大学 机械 电子学 院 ,天 津 306 ) 010
摘要 为抑 制柔性机械臂 的弹・振动 ,提 高定位精度 ,推 导 出单杆 柔性机械臂 的动 力学模型并对其进行线性化, 陛 针对 线・ 的系统模型 , 洼化 采用线性二次型最优调 节器对柔性机械臂末端残余振动进行控 制, 仿真 结果表 明调节 器
抑振作 用明显.
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
0
=
e
-
5 ∀ i 4
1 1 ∀ - n+ 4 i+ O n 1 4
2
2
= ( 9)
n-
i∀ 1 + O
1 n2
2
n = 1, 2, …
n
2
= -
e
-
3 ∀ i 4
1 1 i+ O 4 n 2 1 n + 1 i∀ 1 + O 2 4 n ∀ n+
= ( 10)
n = 1, 2, … 其中 ( 4) # 1( ) =
1 引 言
近年来, 人们对柔性、 弹性系统 my tt ( x , t) + E I y x xxx ( x , t) = 0 0 < x < l , t > 0 y ( 0, t ) = y x ( 0, t) = y xxx ( l , t) = y xx ( l , t) = 0 的控制问题产生了兴趣
[ 1- 8]
0
≥ Sup{ Re , 是系统的谱} 。 在什么条件下等号成
立, 是分布参数控制理论研究中最关心的问题之一。 这个问题一直是偏微分方程、 算子半群和分布参数 控制系统的稳定性研究的一个重大问题。 文献[ 1 ( 1) 3] 给出了系统谱的数字仿真结果, 但未能给出系统 的谱和系统的最优指数衰减率的关系。 Conrad 等
0 1 ″ ″
2 辅助系统特征值的分布 和特征函数表示
( 2) 系统( 3) 或 ( 4) 的特征方程为
″ ″
( x) +
2
( x ) = 0, 0 < x < 1 ( 1) = ′ ( 1) = 0
( 0) =
″ ″
′ ( 0) =
( 6)
如果 = 0, 则系统( 6) 可写成 ( x ) = 0, 0 < x < 1 ( 0) = ′ ( 0) = ( 1) = 0 如果 ≠ 0, 则系统( 6) 可写成 ( x) + ( x ) = 0, 0 < x < 1 ( 0) = ′ ( 0) = ( 1) = ′ ( 1) = 0
3 1 1 n
j
是特征行列式
1 2 3 4
1 e e
1 1
1
! ! 3 2 2
1
2 2
1
3 3
e e
! !
e e
4 4
! !
= 0
( 11) ( 5) 的单根。 由引理 1, 我们给出特征问题 ( 8) 的特征函数表 示公式。 引理 2 特征问题( 5) 的特征函数可表示为
n
1
″ ( x ) dx , ∈ V 。 定义微分算子 I
A=
0
, D ( A 0 ) = { ( u, v) , u ∈ - d4 / dx 4 0 H 4( 0, 1) ∩ V , v ∈ V , u ( 1) = 0, v ′ ( 1) = 0} ; 微分 0 I 算子 A 1 = , D( A 1) = { ( u , v ) , u 4 4 - d / dx 0 4 ∈ H ( 0, 1) ∩V , v ∈V , u ( 1) = 0, v ′ ( 1) = - K u″ ( 1) } 。 设 Y ( t ) = ( y ( x , t ) , y t( x , t ) ) T 。 辅助系统( 3) 可 写成一阶发展方程 d Y ( t) = A 0 Y ( t) , t > 0 dt Y ( 0) = Y 0 Y 0 = ( y 1 , y 2) T ∈ V × L 2( 0, 1) 系统( 2) 可写成一阶发展方程 d Y ( t) = A 1 Y ( t) , t > 0 dt Y ( 0) = Y 0 Y 0 = ( y 1 , y 2) ∈ V × L ( 0, 1)
= e 4, )e
2 n 3 n 1 n 1 1 1
4
时, ∃nj 是 #1 ( ) = 0 的单根。 下面给出特征问题 ( 15) 的特征函数的渐近表 示公式。 由引理 3 可得如下结果: 引理 4 特征问题 ( 15) 的特征函数可渐近表示 为 % n ( x , vn ) = 1 1 2i[ ( e (e (e (e
摘 要 讨论柔性臂的端点角速度反馈控制问题。通过对系统特征值和特征函数的渐近表示式的 进一 步研究 , 用 特征扰动的 P ayley - Wiener 稳定性理 论 , 证明 了该系统 的最优指数 衰减率可 由系统的谱 来 确定。 关键词 Euler - Berno ulli 梁 , Riesz 基 , 指数稳定 , 最优指数衰减率 分类号 O 175. 21
第 15 卷 第 2 期
Vo l. 15 N o. 2
控 制 与 决 策
CON T ROL A N D D ECI SI ON
2000 年 3 月
M ar . 2000
柔性臂振动系统角速度反馈控制的 最优指数衰减率问题*
于景元
( 北京信息与控制研究所 100037)
王耀庭 李胜家
( 山西大学数学系 )
142
控 制 与 决 策
2 00 0 年
的上确界。 但是, 对端点的角速度反馈控制系统 y tt ( x , t ) + y x xxx ( x , t ) = 0 0 < x < 1, t > 0 y ( 0, t ) = y x ( 0, t) = y xx x ( 1, t) = 0 K y x x ( 1, t ) = - y xt ( 1, t) y ( x , 0) = y 1 ( x ) y t ( x , 0) = y 2( x ) 0 ≤ x ≤ 1 的最优指数衰减率问题 , Conrad 方法是失效的。 本 文研究角速度反馈控制系统的特点, 引入一 个辅助系统, 对系统的特征值和特征函数做更精细 的研究。 用特征扰动的 Payley - Wiener 稳定性理 论 , 证明了在一定条件下, 角速度反馈控制系统的最 优能量指数衰减率可用系统的谱来确定。 为了研究系统 ( 2) , 引入一个辅助系统 y tt ( x , t ) + y xx xx ( x , t ) = 0 0 < x < 1, t > 0 y ( 0, t ) = y x ( 0, t) = y xxx ( 1, t) = y xt ( 1, t ) = 0 y ( x , 0) = y 1 ( x ) y t ( x , 0) = y 2 ( x ) 为 研究 系统 ( 2) 和 ( 3) , 这 里引 进空 间 V = { ( x ) ; ∈ H 2 ( 0, 1) , ( 0) = ′ ( 0) = 0} , V 的范数 为‖ ‖ = ( x) ∫″
Wang Yaot ing , L i Shengj ia
( Shanxi U niver sity )
Abstract T he pr oblem o f angular velocity feedback co nt ro l caused by a flex ible beam on a v ibr ating sy st em is discussed. T he stability is w ell know n, but the optima l ex po nent ial decay r ate o n the system is new . In or der to deter mine t he decay r ate, an assistant system as a ba sic sy stem is intro duced, and t he sy st em is considered as a pertur batio n o f t he assistant system . By the Pay ley - Wiener st ability theo ry , it is pr ov ed t hat a set o f the eigenvecto rs o f the system for m a R iesz basis of the sta te spa ce. So t he spectr um o f the sy st em is deter mined, a nd the optimal decay rat e can be deter mined by t he spectr um of t he sy st em. Key words Euler - Ber noulli beam , Riesz basis , ex po nent ial st ability , optim al ex ponential decay rat e
[ 4]
。 Chen 等研究了单根和
研究了系统仅在速度反馈控制 y x xx ( 1, t) = k 1y t ( l , t ) 作用下闭环控制系统的特征元结构问题 , 用隐函 数理论和扰动论的方法证明: 当 k 1 很小时 , 闭环系 统的特征元构成状态空间的 Riesz 基 , 从而证明了 该类控制系统的最优指数衰减率等于系统谱的实部
! x
1 K ]
∀ i 4 2 3 3 3
1
3
e
!
3 4
e
4
!
= 0 e
4!
( 17)
( e 2 n 1 + e 1 4 ( n1 + e ( e( 1 + 3 ) ! 其中,
3 1
)e
2
3 n n1
! x
1
+
4 n1
+
)!
)e
! ( x - 1)
( 12) 。
!
+
3
e
3!
Optimal Exponential Decay Rate on the Flexible Beam with Angular Velocity Feedback Control