基于PLC控制的臂式气动机械手的研制要点
PLC控制机械手控制系统设计

PLC控制机械手控制系统设计PLC(可编程逻辑控制器)是一种用于控制机械设备的电子设备,广泛应用于工业自动化领域。
在机械手控制系统设计中,PLC可以起到关键的作用,实现机械手的精确控制和高效运行。
下面将介绍PLC控制机械手控制系统的设计要点。
首先,PLC控制机械手控制系统设计需要明确系统的功能和需求。
根据机械手的应用场景和任务要求,确定系统需要具备的功能和性能指标,例如机械手的动作速度、精度、负载能力等。
其次,PLC控制机械手控制系统设计需要选择合适的PLC型号和配套设备。
根据系统需求和实际情况,选择适合的PLC型号和配套设备,例如输入输出模块、通信模块、运动控制模块等。
同时,还需要考虑PLC的编程环境和开发工具,确保可以方便地进行PLC程序的编写和调试。
然后,PLC控制机械手控制系统设计需要进行系统的硬件设计。
根据机械手的结构和控制需求,设计硬件电路和连接方式,包括传感器的选择和布置、执行器的选型和控制方式等。
同时,还需要考虑系统的电源供应和电气安全措施,确保系统的稳定性和安全性。
接下来,PLC控制机械手控制系统设计需要进行PLC程序的编写和调试。
根据系统功能和需求,编写PLC程序,包括输入输出的配置、数据处理的逻辑、控制算法的实现等。
在编写过程中,需要进行充分的测试和调试,确保程序的正确性和可靠性。
最后,PLC控制机械手控制系统设计需要进行系统的集成和调试。
将PLC控制系统与机械手的其他部分进行集成,包括传感器、执行器、机械结构等。
进行系统的调试和优化,确保机械手的正常运行和稳定性。
总之,PLC控制机械手控制系统设计需要从系统的功能和需求出发,选择合适的PLC型号和配套设备,进行系统的硬件设计,编写PLC程序并进行调试,最后进行系统的集成和调试。
通过科学合理的设计和调试,可以实现机械手的精确控制和高效运行。
基于PLC控制的气动机械手实验装置的研制

图"
连续动作顺序流程
$
图# 主程序框图
结束语 基于 $%& 控制的气动机械手教学实验演示装置
能够实现物料的自动循环搬运。可以实现单动和连动 两种执行方式。 我们在可编程序控制器课程、 气压传动课程、 机电 一体化系统设计课程中应用此装置, 学生很感兴趣, 认 为有了这套演示装置, 学习这几门课程就更加直观、 生 动了。实践证明, 我们所做的教学实验装置达到了教 学目的和要求, 取得了良好的效果。
基于 !"# 控制的气动机械手实验装置的研制
李国平, 时圣勇, 李宏伟, 艾长胜, 孙 选
!"#$%&’() #*+,-*..() !+(/0&,12 3&+14/.&,*- 564(-10(+, 7+’,&..&,1*+
"1 8/*$41+9, :;1 :;(+9$<*+9, "1 =*+9$>(1, ?1 #;&+9$’;(+9, :/+ @/&+
关键词: 气动; 机械手; 实验装置 !"#;
!
引言 气动技术是实现工业自动化的重要手段。气压传
动的介质来自于空气, 环境污染小, 工程实现容易, 所 以气压传动是一种易于推广普及的实现工业自动化的 应用技术。气动技术在机械、 化工、 电子、 电气、 纺织、 食品、 包装、 印刷、 轻工、 汽车等各个制造行业, 尤其在 各种自动化生产装备和生产线中得到了广泛的应用, 极大地提高了制造业的生产效率和产品质量。气动系 统的应用, 引起了世界各国产业界的普遍重视, 气动行 业已成为工业国家发展速度最快的行业之一。 可编程序控制器 ( !"#) 是以微处理器为基础, 综 合计算机技术、 自动控制技术和通信技术发展起来的 一种新型、 通用的自动控制装置, 它具有结构简单、 易 于编程、 性能优越、 可靠性高、 灵活通用和使用方便等 一系列优点, 近年来在工业生产过程的自动控制中得 到了越来越广泛的应用。 为实现大专院校的教学目标, 适应社会需要, 气压 传动与控制技术已成为大专院校工业自动化、 机电一 体化等专业的教学内容。为此我们研制一套教学实验 装置可作为学校数控技术、 机电一体化、 机械类等专业 开设可编程序控制器课程、 气压传动与控制课程、 机电 一体化系统设计课程的教学演示实验, 可使学生验证 其编程的正确性, 了解工业现场实际应用技术, 增强学 生学习专业课的兴趣和信心。 " 气动机械手实验装置设计 气动机械手实验装置原理如图 E 所示。真空吸盘 且吸盘在升降缸 F 的作用下可以 K 可以吸住物料块 B, 上下移动。真空吸盘连同升降缸在左右移动气缸 E 的 作用下沿着圆柱导轨 I 可以左右移动, 最后在复位进 万方数据 退气缸 A 的作用下将物料块送回原始位置, 为下一个
基于PLC控制的臂式气动机械手的研制

5结 语
根 据 GIS占空 间 小 、可 靠 性 高 的特 点 。 当采 用 简 化 一 次 主 接 线 以 后 ,可 以更 体 现 GIS的 优 点 和 长 处 。 同时 还 能 节 省 电 站 一 次 设 备 的 投 资 , 是 一 举 两 得 的 好 事 ,值 得 推 广 。 参考 文 献 : [1]黎 斌 .S 高压 电 器 [M] ,北 京 :机 械 工 业 出版 社 ,2008. [2]PTC.SF6绝 缘 金 属 封 闭开 关 设 备 GIS [Z].2008.
n YA4
— _.1}.-一 前后 伸缩缸
图 3 PLC的外 部 接 线
5臂 式 气 动 机 械 手 PLC控 制 系统 设 计
5.1 PLC型 号 的 选 定 由该 气 动 机 械 手 的 基 本 功 能 要 求 可 以 知 道 ,有 启 动 、
停 止 两 个 输 入 点 、有 用 于控 制 3个 二 位 五 通 双 线 圈 电 磁 阀
图 4 PLC控 制 程 序梯 形 图 (下 转 第 99页 )
经 验
母 线 I
图 6 进 线 间 隔 简 化 后 的 平 面 布 置 和 侧视
接 地开 笑 接 地 开关
接地 开 关
图 7 简化 主接 线 的实 例
GIS进 线 间 隔 简化 后 ,在 靠 近 进 线 处 已没 有 分 支 存 在 , 即没 有 刀 闸 和地 刀 ,也 没 有 过 渡 气 室 。 及 LA 布 置 在 间 隔 人 口处 ,如 图 6所 示 ,位 于 间 隔 筒 体 的 上 方 或 下 方 ,见 N—N侦4视 图 。
8.两 位 两 通 双 线 圈 电 磁 阀 9.夹 头 1O.消声 器 11.调 速 阀 12.二 位 五 通 双 线 圈 电 磁 阀 l3.直 动 双 轴 作 用 气 缸 l4.回转 气 缸
基于PLC的机械手控制设计
基于PLC的机械手控制设计一、绪论机械手是一种可以模仿人手操作的自动化机器。
它可以完成不同的工作任务,提高生产效率,减少劳动力成本。
在许多工业领域,机械手已经成为不可或缺的设备。
PLC(可编程逻辑控制器)是一种常用的自动化控制设备,它具有强大的逻辑计算和控制能力。
将机械手与PLC结合起来,可以实现对机械手的精确控制,提高其工作效率及安全性。
本文将讨论基于PLC的机械手控制设计,包括硬件设计、软件设计和控制实现。
二、硬件设计1. 机械手结构设计机械手的结构设计是机械手控制系统的基础。
一般来说,机械手的结构包括电机、传动装置、执行器、传感器等部件。
在进行硬件设计时,需要根据具体的工作任务和要求选择合适的机械手结构。
为了能够更好地与PLC进行配合,需要考虑机械手各部件的接口和通信方式。
2. PLC选择及接口设计PLC的选择直接影响到机械手控制系统的性能和稳定性。
在选择PLC时,需要考虑其输入/输出接口数量、通信接口标准、逻辑控制能力等方面的性能指标。
还需要根据机械手的具体结构和控制要求设计合适的PLC接口,以便实现PLC与机械手的连接和控制。
3. 传感器设计传感器在机械手控制系统中起着至关重要的作用。
传感器可以用来检测机械手的位置、姿态、力度等信息,并将这些信息传输给PLC,从而实现对机械手的实时监控和控制。
在硬件设计中,需要选择合适的传感器类型和布置位置,并设计相应的传感器接口电路,以确保传感器能够准确地获取所需的信息并与PLC进行通信。
三、软件设计1. PLC编程PLC的编程是机械手控制系统中的核心环节。
在进行PLC编程时,需要根据机械手的控制逻辑和工作流程,设计相应的控制程序。
控制程序包括逻辑控制部分、任务调度部分、通信控制部分等。
在设计控制程序时,需要考虑机械手的运动规划、安全控制、故障处理等方面的要求,以确保机械手能够安全、快速、准确地完成工作任务。
2. HMI设计HMI(人机界面)是机械手控制系统的另一个重要组成部分。
基于PLC的气动机械手控制系统设计

基于PLC的气动机械手控制系统设计一、本文概述随着工业自动化技术的飞速发展,气动机械手作为实现生产自动化、提高生产效率的重要工具,在各个领域得到了广泛应用。
基于可编程逻辑控制器(PLC)的气动机械手控制系统,以其稳定可靠、易于编程和维护的特性,成为当前研究的热点之一。
本文旨在探讨基于PLC 的气动机械手控制系统的设计方法,包括系统构成、硬件选择、软件编程以及调试与优化等方面,以期为我国工业自动化领域的发展提供参考和借鉴。
本文将简要介绍气动机械手及其控制系统的基本原理和特点,为后续的设计工作奠定理论基础。
将详细阐述PLC在气动机械手控制系统中的应用优势,包括其可靠性、灵活性以及扩展性等方面的优势。
在此基础上,本文将深入探讨基于PLC的气动机械手控制系统的设计方法,包括系统架构的设计、硬件设备的选择、软件编程的实现以及系统调试与优化等方面。
本文将总结基于PLC的气动机械手控制系统的设计要点和注意事项,为相关工程实践提供指导和借鉴。
通过本文的研究,旨在为我国工业自动化领域的发展提供新的思路和方法,推动气动机械手控制系统的技术进步和应用推广。
也期望本文的研究成果能对相关领域的学者和工程师产生一定的启示和借鉴作用,共同推动工业自动化技术的发展和创新。
二、气动机械手控制系统概述气动机械手控制系统是以可编程逻辑控制器(PLC)为核心,结合气动执行元件、传感器以及相应的控制逻辑,实现对机械手的精确控制。
该系统结合了气动技术的快速响应和PLC的灵活编程特性,使得机械手的动作更加准确、迅速且易于调整。
PLC控制器:作为整个控制系统的核心,PLC负责接收和处理来自传感器的信号,根据预设的程序逻辑,控制气动执行元件的动作。
PLC 具有高度的可靠性和稳定性,能够适应各种复杂的工作环境。
气动执行元件:包括气缸、气阀和气压调节器等。
气缸是实现机械手抓取、移动等动作的主要执行机构;气阀用于控制气缸的运动方向和速度;气压调节器则用于调节气缸的工作压力,以保证机械手的稳定性和精确性。
基于PLC的机械手控制设计

基于PLC的机械手控制设计随着自动化技术的不断发展和应用,机械手已经逐渐取代了人力完成一些机械加工、装配、搬运等工作,它的出现大大提高了生产效率和减少了人力资源的浪费。
而机械手的控制方式也随着自动化技术的发展不断更新,例如利用PLC来完成机械手的控制,这种控制方式不仅控制精度高、速度快,而且易于操作和维护。
1. 确定机械手的类型和结构机械手可以分为各种类型,例如串联式机械手、并联式机械手、多关节机械手等。
在机械手类型的选择时,需要根据实际的生产需求和机械手的应用场景来确定,还需要根据所选机械手的结构来设计控制程序。
2. 制定机械手控制系统的结构方案在机械手控制系统的设计中,需要确定各个模块之间的关系和控制流程。
在涉及多个模块的情况下,需要利用输入输出模块进行数据传输,在控制程序中根据输入输出模块来控制机械手的运动和操作。
设计一个坚实的控制系统结构方案有助于提高控制精度和稳定性。
3. 确定机械手控制系统的输入和输出信号在基于PLC进行机械手控制时,需要明确机械手控制系统的输入和输出信号。
例如,进料位置的传感器、夹具夹持状态的传感器、机械手的末端执行器输出的信号等都需要被收集并进行处理,以便确定控制程序的执行顺序。
4. 编写机械手控制程序在机械手控制系统的设计中,编写控制程序是至关重要的步骤,它直接影响机械手的运动和操作。
编写控制程序时,需要使用PLC编程软件进行编程,根据机械手控制系统的输入和输出信号,设计控制程序的执行流程和循环次数等参数,最终实现机械手的自动化操作。
5. 完成机械手控制系统的调试和运行在设计完机械手控制系统后,需要进行调试和运行,查看系统的工作状态和是否存在异常。
如果发现问题,需要及时进行调整和修正。
在确认机械手控制系统没有问题后,就可以进行实际生产操作,提高生产效率和质量。
总之,基于PLC的机械手控制设计需要进行细致的规划和设计,以确保机械手控制系统的质量和稳定性,从而提高生产效率和降低成本。
《2024年基于PLC的气动机械手控制系统设计》范文
《基于PLC的气动机械手控制系统设计》篇一一、引言随着工业自动化程度的不断提高,气动机械手在制造业中的应用越来越广泛。
为了满足高效率、高精度的生产需求,气动机械手的控制系统设计变得尤为重要。
本文将重点介绍基于PLC (可编程逻辑控制器)的气动机械手控制系统设计,探讨其设计思路、系统架构、硬件配置、软件设计以及系统测试与优化等方面的内容。
二、设计思路与系统架构基于PLC的气动机械手控制系统设计旨在实现高精度、高效率的机械手运动控制。
设计思路主要包括确定系统需求、选择合适的PLC型号及气动元件、设计控制逻辑及算法等。
系统架构主要由气动机械手本体、PLC控制器、传感器及执行器等部分组成。
其中,PLC控制器作为核心部件,负责接收上位机指令,控制气动元件的开关及动作,实现机械手的运动控制。
传感器则负责实时监测机械手的运动状态及环境信息,为PLC控制器提供反馈信号。
三、硬件配置1. PLC控制器:选择合适的PLC型号,根据气动机械手的控制需求,确定I/O点数、内存容量等参数。
2. 气动元件:包括气缸、电磁阀、气源处理元件等,根据机械手的动作需求选择合适的气动元件。
3. 传感器:包括位置传感器、压力传感器等,用于实时监测机械手的运动状态及环境信息。
4. 执行器:包括电机、驱动器等,负责驱动机械手完成各项动作。
四、软件设计1. 编程语言:采用适合PLC编程的编程语言,如梯形图、指令表等。
2. 控制逻辑设计:根据气动机械手的动作需求,设计控制逻辑及算法,实现精确的运动控制。
3. 程序调试与优化:在PLC仿真软件中进行程序调试,确保程序正确无误后,再在实物上进行测试与优化。
五、系统测试与优化1. 系统测试:对气动机械手控制系统进行全面的测试,包括静态测试和动态测试,确保系统运行稳定、可靠。
2. 参数调整:根据测试结果,对气动元件、传感器等参数进行调整,以达到最佳的控制效果。
3. 优化改进:根据实际使用情况,对控制系统进行优化改进,提高系统的性能和稳定性。
基于PLC控制的气动机械手的设计
毕业设计(论文、作业)毕业设计(论文、作业)题目:基于PLC控制的气动机械手的设计分校(站、点):年级、专业:教育层次:学生姓名:学号:指导教师:完成日期:目录摘要 (Ⅰ)一、机械手设计方案 (1)(一)机械手的手部结构方案设计 (1)(二)机械手的手腕结构方案设计 (1)(三)机械手的手臂结构方案设计 (1)(四)机械手的驱动方案设计 (1)(五)机械手的控制方案设计 (1)(六)机械手的主要参数 (1)(七)机械手的技术参数列表 (2)二、机械手手部设计 (2)(一)夹持式手部结构 (2)(二)升降缸的尺寸设计与校核和伸缩缸的选择 (3)三、机械手的PLC控制设计 (13)(一)可编程序控制器的选择及工作过程 (13)(二)机械手可编程序控制器控制方案 (13)四、结论 (14)参考文献 (14)致谢 (16)内容摘要对气动机械手的基本要求是能快速、准确地拾-放和搬运物件,这就要求它们具有高精度、快速反应、一定的承载能力、足够的工作空间和灵活的自由度及在任意位置都能自动定位等特性。
设计气动机械手的原则是:充分分析作业对象(工件)的作业技术要求,拟定最合理的作业工序和工艺,并满足系统功能要求和环境条件;明确工件的结构形状和材料特性,定位精度要求,抓取、搬运时的受力特性、尺寸和质量参数等,从而进一步确定对机械手结构及运行控制的要求;尽量选用定型的标准组件,简化设计制造过程,兼顾通用性和专用性,并能实现柔性转换和编程控制.本次设计的机械手是通用气动上下料机械手,是一种模拟大中型场合工作的机械搬运设备。
可以改变动作程序的自动搬运或操作设备,操作频繁的生产场合。
在发出指令协调各有关驱动器之间的运动的同时,还要完成编程、示教/再现以及其他环境状况(传感器信息)、工艺要求、外部相关设备之间的信息传递和协调工作,使各关节能按预定运动规律运动。
关键词:机械手 PCL 气动Ⅰ基于PLC 控制的气动机械手的设计一、机械手的设计方案(一)机械手的手部结构方案设计为了使机械手的通用性更强,把机械手的手部结构设计成可更换结构,当工件是棒料时,使用夹持式手部;当工件是板料时,使用气流负压式吸盘。
《2024年基于PLC的气动机械手控制系统设计》范文
《基于PLC的气动机械手控制系统设计》篇一一、引言随着工业自动化技术的不断发展,气动机械手作为现代工业生产线上重要的执行机构,其控制系统的设计显得尤为重要。
本文将详细介绍基于PLC的气动机械手控制系统设计,包括系统设计的目的、意义、相关技术背景以及应用领域。
二、系统设计目的与意义气动机械手控制系统设计的目的是为了提高生产效率、降低人工成本、提高产品质量和稳定性。
通过引入PLC(可编程逻辑控制器)技术,可以实现机械手的精确控制、灵活编程以及高度集成。
本系统设计具有重要意义,主要表现在以下几个方面:1. 提高生产效率:通过自动化控制,减少人工操作,提高生产效率。
2. 降低人工成本:减少人力投入,降低企业运营成本。
3. 提高产品质量:精确控制机械手动作,提高产品加工精度和一致性。
4. 增强系统稳定性:通过PLC的逻辑控制,提高系统运行的稳定性和可靠性。
三、相关技术背景PLC是一种基于微处理器的数字电子设备,具有高度的灵活性和可编程性。
它可以通过数字或模拟输入/输出对各种工业设备进行控制。
气动机械手是一种以压缩空气为动力源的机械设备,具有结构简单、动作迅速、节能环保等优点。
将PLC技术应用于气动机械手控制系统中,可以实现机械手的自动化控制和精确运动。
四、系统设计内容基于PLC的气动机械手控制系统设计主要包括硬件设计和软件设计两部分。
(一)硬件设计硬件设计主要包括PLC控制器、气动执行元件、传感器以及连接线路等部分。
其中,PLC控制器是整个系统的核心,负责接收和处理各种信号,控制气动执行元件的动作。
气动执行元件包括气缸、电磁阀等,负责实现机械手的实际动作。
传感器用于检测机械手的位置、速度、压力等状态信息,为PLC提供反馈信号。
连接线路则负责将各部分连接起来,实现信号的传输和控制。
(二)软件设计软件设计主要包括PLC程序设计和人机界面设计两部分。
PLC程序设计是整个系统的灵魂,它根据实际需求编写控制程序,实现机械手的精确控制和灵活编程。
基于PLC的气动机械手控制系统设计技术研究
基于PLC的气动机械手控制系统设计技术研究气动机械手是一种常见的工业自动化设备,它通过气动元件实现抓取、放置和搬运物体的功能。
为了实现对气动机械手的精确控制,需要设计一个高效可靠的控制系统。
本文将对基于可编程逻辑控制器(PLC)的气动机械手控制系统设计技术进行研究。
首先,针对气动机械手的控制需求,需要确定系统的功能要求和工作流程。
一般来说,气动机械手的控制系统需要实现如下功能:抓取物体、放置物体、调节机械手臂姿态、控制气动元件的开关和速度。
根据不同的应用场景和工作要求,可以进一步确定系统的具体功能需求,例如需要实现的抓取力度、精度等参数。
接下来,设计气动机械手的控制系统硬件。
在设计PLC控制系统时,可以选择合适的PLC型号,并根据系统需求选择合适的输入输出模块。
一般来说,气动机械手的控制系统需要包括传感器模块、执行器模块和PLC主控模块。
传感器模块用于检测气动机械手的状态和周围环境的参数,例如机械手的位置、角度、物体的存在与否等。
执行器模块用于控制气动元件的开关和速度,例如控制气缸的伸缩、气阀的开关等。
PLC主控模块负责接收传感器模块的信号并根据程序进行相应的控制命令输出。
然后,设计气动机械手控制系统的软件。
PLC控制系统的软件设计是整个系统的关键。
在设计PLC程序时,需要根据工作流程和功能要求,编写相应的程序段。
例如,当需要实现气动机械手抓取物体的功能时,可以编写一个抓取程序段,实现气缸的伸缩,并控制气阀的开关。
当需要调节机械手臂的姿态时,可以编写一个调节程序段,实现机械手臂的旋转和抬升。
在设计PLC程序时,需要考虑系统的实时性和可靠性,并对程序进行充分的测试和调试。
最后,测试和调试气动机械手控制系统。
在完成硬件和软件设计后,需要进行系统的测试和调试。
通过检测系统的各个模块是否正常工作以及整个系统是否按照设计要求进行操作,来验证系统的可靠性和稳定性。
如果发现系统存在问题,需要对硬件和软件进行相应的调整和优化。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机电工程技术2011年第40卷第2期基于PLC 控制的臂式气动机械手的研制黄广伟(东莞理工学院城市学院,广东东莞523106)收稿日期:2010-09-01,气动控制技术在制造业等行业得到了广泛应用。
为适应社会需求,PLC 控制系统的设计,研制出了基于PLC 控制的臂式气动机械手。
,达到预期的效果。
;机械手文献标识码:B文章编号:1009-9492(201102-0035-021引言为了使机电工程系学生能够更好地掌握气动技术、传感技术及PLC 编程技术,并能利用它们进行创新设计,笔者专门研制了一种基于三菱PLC 控制的臂式气动机械手,该机械手能实现抓取物品、上下、前后及旋转运动。
2臂式气动机械手的总体结构设计臂式气动机械手的基本结构如图1所示,由V 型夹手1、上下移动缸2、前后伸缩缸3、立柱4、回转缸5以及用于固定用的底板6等组成。
上下行程为100mm ,左右行程为150mm ,总体尺寸(长×宽×高)为400mm×200mm×600mm ,立柱采用铝合金材料。
考虑到受力情况及产品的性价比,上下移动缸及前后伸缩缸均采用台湾的CHANTO 长拓缸径D =10mm的双轴单作用缸。
该臂式气动机械手配有电控箱,电控箱与机械手主体分离,可实现远程控制。
操作面板、电磁阀、PLC 可编程控制器等均安装在电控箱上。
3臂式气动机械手的功能要求该气动机械手功能:夹手1可以夹住物品,在上下移动缸2的作用下可实现上下移动,而在前后伸缩缸3作用下可实现前后移动,在回转缸5作用下可实现绕Z 轴作90°旋转运动。
机械手具有一定的开放性,可根据不同的要求实现不同的运动组合,从而实现不同的应用功能。
当机械手处于图1所示状态,夹头打开,上下移动缸处于最顶端,前后伸缩缸处于最后端时为原始状态。
机械手典型动作过程:将左下方的物品夹住,顺时针旋转90°,搬往右前下方,并回到原点。
1个工作周期如下:当按下启动按钮,上下移动缸2向下伸出并延时2秒→V 型夹手1夹紧物品并延时1秒→上下移动缸2向上缩回并延时2秒→回转气缸5将顺时针转过90°并延时2秒→前后伸缩缸3将向前伸出并延时2秒→上下移动缸2将向下伸出并延时2秒→V 型夹手1将松开放下物品并延时2秒→上下移动缸2将向上移动并延时2秒→前后伸缩缸3将向前伸出延时2秒→回转气缸5逆时针转过90°→回到初始状态,等待下一次指令。
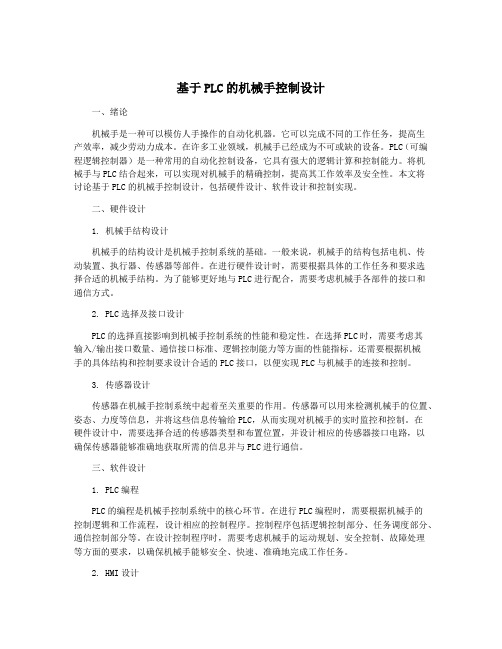
4臂式气动机械手的气动系统设计气动原理如图2所示,实现对2个直动气缸、1个回转气缸及1个夹手的动作控制。
气动系统由1个二位二通1.夹手2.上下移动缸3.前后伸缩缸4.立柱5.回转缸6.底座图1臂式气动机械手结构图机电工程技术2011年第40卷第2 期图4PLC 控制程序梯形图图3PLC 的外部接线1.空气压缩机2.单向阀3.压力表4.储气罐5.溢流阀6.分水滤器7.减压阀8.两位两通双线圈电磁阀9.夹头10.消声器11.调速阀12.二位五通双线圈电磁阀13.直动双轴作用气缸14.回转气缸图2气动原理图工的电磁阀、3个二位五通双线圈电磁阀、1个回转气缸、2个双轴作用直动气缸、1个夹手、6个调速阀、若干个消音器以及其它的元件组成。
调速阀11的作用是调整各气缸运行速度,以防止因速度过大对物料及机械手的冲击,保持机械手的各个动作协调;3个二位五通双线圈电磁阀12控制气动回路的换向,从而实现双轴作用直动气缸上升和下降、往前和往后,以及回转气缸的回转运动;二位二通的电磁阀用以实现夹手9的夹紧与放松功能。
5臂式气动机械手PLC 控制系统设计5.1PLC 型号的选定由该气动机械手的基本功能要求可以知道,有启动、停止两个输入点、有用于控制3个二位五通双线圈电磁阀及1个二位二通的电磁阀的四个输出点。
考虑到在实际安装、调试和应用中,还可能会发现一些估算中未预见到的因素,根据实际情况增加一些输入、输出信号,在选型中应多预留一些点数,以备将来调整、扩充使用。
因此PLC 选用了三菱的FX 系列的FX2N -24MR[1],直流24V 稳压电源,输入与输出点数均为12,符合要求。
5.2PLC 的外部接线图(安装图)根据该臂式气动机械手一个典型动作过程,将各电磁阀及按钮的接线分别接到电控箱上PLC 控制器相应的输出、输入接口上。
PLC 的外部接线图如图3所示。
启动按钮X1、停止按钮X2分别接PLC 的输入点X101、X102;而PLC 的输出点Y201、Y202、Y203、Y204分别接电磁阀YA1(回转缸)、电磁阀YA2(夹头)、电磁阀YA3(上下移动缸)、电磁阀YA4(前后伸缩缸)。
5.3PLC 控制系统程序设计PLC 控制系统程序设计是整个气动机械手的核心部分,也是实现整个系统预定功能的至关重要部分。
考虑到该机械手的功能要求,本设计采用STL (步进梯形)指令的方法进行编程。
STL 指令是用于设计顺序控制程序的专用指令,该指令易于理解,使用方便,运用相当广泛[2]。
(下转第99页)机电工程技术2011年第40卷第2期根据该臂式气动机械手一个典型动作过程,设计出PLC 控制程序的梯形图如图4所示。
6结语该臂式气动机械手充分发挥了PLC 、气动技术的优点,将气动技术、传感技术、机电控制技术三者很好的结合起来,具有一定的开放性,可根据不同的要求,编写不同的程序以实现不同的功能。
经过多次实验与调试,以及半年来实际使用后反馈的情况来看,该臂式气动机械手能够较好地完成预定的动作,安全性、可靠性、准确性都良好。
参考文献:[1]长拓液压气动有限公司.长拓液压气动有限公司产品手册[Z ].2006.[2]廖常初.PLC 基础及应用(第2版)[M ].北京:机械工业出版社,2007.作者简介:黄广伟,男,1982年生,广东汕尾人,硕士研究生,助理实验师。
研究领域:机电一体化、PLC 技术、液压与气动技术。
已发表论文1篇。
(编辑:吴智恒图6进线间隔简化后的平面布置和侧视GIS 进线间隔简化后,在靠近进线处已没有分支存在,即没有刀闸和地刀,也没有过渡气室。
PT 及LA 布置在间隔入口处,如图6所示,位于间隔筒体的上方或下方,见N-N侧视图。
4GIS 简化主接线的实例率先使用GIS 的国家,大多采用了简化的主接线方式。
简化一次主接线中,图7是比较典型的双母进线间隔剖面及各个电气元件的位置[2]。
它既考虑了GIS 免维护的特点,也考虑了检修拆装的可能性和元件的更换,同时充分利用空间来布置,做到结构紧凑,整体运输(注意:整个间隔运输时是不装PT 的)。
5结语根据GIS 占空间小、可靠性高的特点,当采用简化一次主接线以后,可以更体现GIS 的优点和长处,同时还能节省电站一次设备的投资,是一举两得的好事,值得推广。
参考文献:[1]黎斌.SF 6高压电器[M ].北京:机械工业出版社,2008.[2]PTC.SF 6绝缘金属封闭开关设备GIS [Z ].2008.作者简介:方煜瑛,女,1975年生,广东顺德人,大学本科,工程师。
研究领域:800~1100kVGIS 工程设计。
已发表论文4篇。
(编辑:王智圣图7简化主接线的实例!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!(上接第36页)Abstracts11-02-13Research of the Reasoning Machine for the Watch Product Design11-02-16ISIGHT Based Structural Optimization of Machine Tool Spindle11-02-18Parametric Design of Rail Container Gantry Crane11-02-21UG-Based Automobile Cover Drawing Die Entity Design11-02-24The Application of 1D Simulation during the Development of the Turbocharged Gasoline Engine11-02-27A HMI Design for 8-Bit MCU Application11-02-31Study on Communication and Control System of Cash Recycling ATM Based on CAN Bus11-02-35Study of Arm Pneumatic Manipulator Based on PLC ControlledLI Shi-jie, YUAN Qing-ke, GUO Chun-rong, ZHAN Pei-zhi Abstract:Key words:ZHANG Wei , ZHOU Zhi-shu Abstract:Key words:ZHANG Huan, XIA Xu-hui, GAO Long Abstract:Key words:LI Chun-you Abstract:Key words:XU Si-chuan, DENG Xiao, HAN Wen-yan Abstract:Key words:HU Yong-jian Abstract:Key words:WEI Wen-qiu, ZHUANG Huan-wei Abstract:Key words:HUANG Guang-wei Abstract:Key words:According to the feature of watch products and watch design methods of the experts, by discussing the reasoning machine of the watch products design, this paper puts forward a new reasoning strategy, which is integrated by the rule-based reasoning and the simulated annealing algorithm reasoning and describe the procedure in detail.reasoning machine; rule-based reasoning machine; SA-based Reasoning Machine; reasoning strategyThe mechanical optimal design provide an important scientific design for the engineering design. ISIGHT is used in this article, to achieve the objectives of minimizing spindle deflection and the lightest weight of the spindle shaft. It establishes a mathematical model of shaft’s multi-objective optimization, and optimizes the design of the spindle. This method is simple and practical, and the optimal results are reasonable and reliable. ISIGHT; machine tool spindle; optimizationIt introduces a kind of design method in gantry Crane based on VB by calling ANSYS. It makes full use of the advantage of VB in GUI development to connect VB with ANSYS, and uses VB language designed a good visual interface of crane metal structure analysis interface. The method has improved the efficiency of the crane design analysis and the flexibility of operation which has guiding significance.parametric design; VB; gantry craneIn this paper, automobile panel B under column support plate of tools described in UG as a means of drawing die for their detailed entity design, to complex automobile panel drawing die design of the study to guide the actual production. UG; automotive panel; drawing dieThe 1D thermodynamic simulation has been widely used among the development of the spark-ignition gasoline engine. In this paper, by using the 1D simulation software Amesim, a turbocharged gasoline engine simulation model was built up. Valve timing, intake &exhaust systems were optimized during the simulation, and the turbocharger matching calculation was done as well. By comparing the results between the test and the simulation, the simulation was validated.1D thermodynamic simulation; spark-ignition gasoline engine; developmentIn order to expand the function of 8-bit MCU, a HMI(HumanMachine Interface design with LPC2478MCU is given which can control TFT LCD display, get key value from keyboard and touch screen, set and clear digital I/O,save and load data etc.. This HMI is especially suitable for product development in specialty field, an application example in dry block temperature calibrator is given at the same time.HMI; 8-bit MCU; LPC2478; SCPIThis paper constructs a distributed control and communications system for Cash Recycling ATM based on CAN bus and digital signal controller, after analyzing its diversity and complexity in architecture and function, and its some unique requirements as a financial security, such as security, real-time, stability. And a hardware structure and software method of communication and control system for every module is presented systematically and detailedly based on stability and the real-time requirements. The trial machine proved that the above system and methods can meet the Cash Recycling ATM‘s high real-time, security, stability requirements.cash recycling ATM; CAN bus; information interaction; digital signal controllerWith the rapidly development of industrialization, the pneumatic controlled technology has been widely applied in the manufacturing industry. To meet the needs of community and teaching, and concerning with pneumatic and PLC technologies, the overall structure of manipulator, the pneumatic circuit and the PLC control system are designed. The arm pneumatic manipulator based on PLC controlled is also designed. Judging from the results of debugging and usage, the pneumatic manipulator has run well under the control of PLC, and achieved the desired results. PLC; pneumatic system; manipulator12(GuangdongUniversity of Technology, Faculty of Electrical Engineering,Guangzhou510006, China(1.Departmentof Machinery andAutomation, Wuhan University of Science and Technology, Wuhan430081, China;2.Luoyang Engineering and Research Institute for Nonferrous Metals Processing, Luoyang471039, China(Collegeof Mechanical,Wuhan University of Science and Technology, Wuhan430081, China(LoudiVocational &Technical College, Loudi417000,China(Schoolof AutomobileStudies, Tongji University, Shanghai 201804, China(TuHaDrilling Technology Research Institute of XDEC,Shanshan 838202, China(GuangdongProvince TechnologyResearch Center, Guangdong Polytechnic Normal Univ., Guangzhou510070, China(Departmentof Mechanical &ElectronicEngineering, City College of Dongguan University of Technology,Dongguan523106,China。