飞思卡尔培训资料
合集下载
《智能车制作 “飞思卡尔杯”从入门到精通》教材部分章节节选
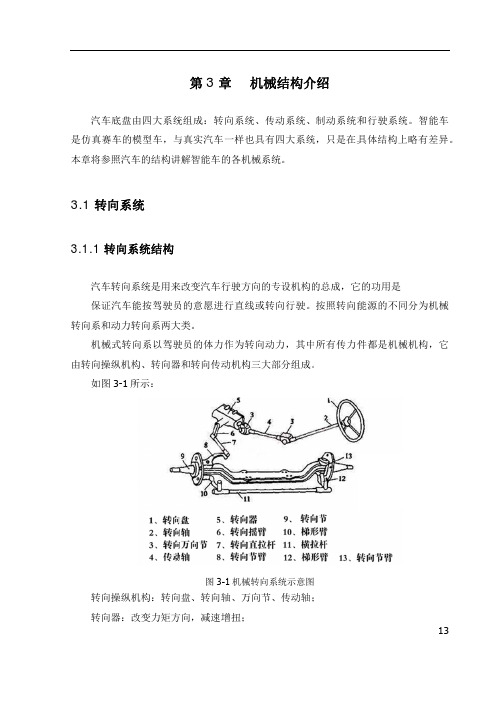
图 3-7 前置 置卧式
16 6
图 3-8 后置卧式
优点:安 安装原车模 模舵机布置方 方式、改动 动量小,重心 心低; 缺点:响 响应速度慢 慢、两边拉杆 杆长度不一 一样、转向不 不对称。 2).扣式
图 3-9 扣式 扣
优点:重 重心低、响 响应速度快、 、转向平顺 顺对称; 缺点:安 安装过程复 复杂、不利于 于后续维护 护调整。 3).卧式
图 3-14匀速圆 圆周运动
转向舵机因 因型号固定 定在供电电 压确定时其 其输出力矩 矩是固定的, ,我们知道 道力矩等于 于 力与 与力臂的乘积 积,即 M=F F*L。舵机 的输出力矩 矩与摆臂长度关系如下 下: 舵机转矩 矩=舵机摆臂 臂作用力*摆臂长度 摆 18 8
假设舵机 机输出力矩 矩是恒定的 ,其输出轴 轴的旋转角 角速度也是恒 恒定的,舵 舵机摆臂端 端 部的 的瞬时线速度 度随舵机摆 摆臂长度增 加而增大。摆臂的瞬 瞬时线速度大 大会导致转 转向系统灵 灵 敏度 度提高,这是 是我们最希 希望得到的。 。 同时,我 我们知道在 在转向时舵机 机摆臂的力 力传递搭到 到横拉杆,横 横拉杆的作 作用力大于 于 轮胎 胎阻力时才开 开始转向,小于或者 等于轮胎阻 阻力时不转 转向。开始转 转向后,横 横拉杆作用 力越 越大轮胎转的 的越快,也 也就是说转向 向响应速度 度越快。 而舵机力 力矩是恒定 定的,舵机摆 摆臂作用力 力与摆臂长 长度是成反比 比的,此长 长彼消。舵 舵 机摆 摆杆不能太长 长也不能太 太短,太短, 响应慢,太长,拉不 不动,响应 应也慢。 最合适的 的舵机摆臂 臂长度值, 可以通过转 转向系统四 四杆机构仿真 真结合实际 际测试来获 获 取。实际测试可 可以选用不 不同长度的舵 舵机摆臂装 装车后测试转 转向灵敏度 度。 获取最佳舵 舵机摆臂长 长度后,可 以对摆臂的 的外形做优 优化以达到减 减重、美观 观的效果。 图 3 3-15 为优化 化后的舵机摆 摆臂,选用 用 1mm 不锈钢板线切 切割成型。 不锈钢板有 有良好的刚 刚 度、韧性,为了 了减重将摆 摆臂中部切除 除一块。
飞思卡尔单片机教学

模式选择及相关引脚 试时使用。XCLKS表示:1-使用pierce oscillator,0-使用colpitts oscillator ,内部有上拉电阻,所以悬空默认为1,只在RESET上升
沿锁存。LSTRB:在外部使用2片8位宽度存储器时和ADDR0,R/W配合使用。可可转转到到9页页图图。。
模式选择和PORTE复用 TEST:保留脚,接地 XIRQ:非屏蔽中断 IRQ:可屏蔽中断
RAM
EEPROM
Flash/ROM
外部扩展存储器
低
§3-5 复位及时钟—复位
上电复位
单片机自动检测VDD端的正跳变,启动自动工作。
外部复位
通过RESET引脚加一低电压,拉低超过一定时间 后可实现复位。
看门狗复位
帮助系统在软件跑飞后自动复位。
时钟监视器复位
利用内部的RC电路来保证时钟频率满足要求。
MC9S12DG128拥有128K的FLASH,8K的RAM,2K的EEPROM。
用于给单片机内部提供合适的电源电压,9S12单片机内核使用2.5V供电.VDD1\2,VSS1\3,VDDPLL若使用电压调整模块,这些引脚
电压调整模块及相关引脚 只用接去耦电容.注意VDD1.2的箭头是向外出的.
电压调整模块
存储器容量寄存器
RAM_SW2-RAM_SW0:分配系统RAM存储空间
寄存器区映射寄存器-INITRG
指定内部寄存器区基址的高5位。 则最小基址是$0000,最大基址为$7FFF(D7=0决定)。
使用时,一般定位在$0000开始的1K中。 因为前256个字节可以用直接地址(8 bit地址)访问,如果
Z: 0标志,当运算结果为0时,该位置1。
V: 2补码运算溢出标志,当运算结果出现2补码溢出时,该位置1。
沿锁存。LSTRB:在外部使用2片8位宽度存储器时和ADDR0,R/W配合使用。可可转转到到9页页图图。。
模式选择和PORTE复用 TEST:保留脚,接地 XIRQ:非屏蔽中断 IRQ:可屏蔽中断
RAM
EEPROM
Flash/ROM
外部扩展存储器
低
§3-5 复位及时钟—复位
上电复位
单片机自动检测VDD端的正跳变,启动自动工作。
外部复位
通过RESET引脚加一低电压,拉低超过一定时间 后可实现复位。
看门狗复位
帮助系统在软件跑飞后自动复位。
时钟监视器复位
利用内部的RC电路来保证时钟频率满足要求。
MC9S12DG128拥有128K的FLASH,8K的RAM,2K的EEPROM。
用于给单片机内部提供合适的电源电压,9S12单片机内核使用2.5V供电.VDD1\2,VSS1\3,VDDPLL若使用电压调整模块,这些引脚
电压调整模块及相关引脚 只用接去耦电容.注意VDD1.2的箭头是向外出的.
电压调整模块
存储器容量寄存器
RAM_SW2-RAM_SW0:分配系统RAM存储空间
寄存器区映射寄存器-INITRG
指定内部寄存器区基址的高5位。 则最小基址是$0000,最大基址为$7FFF(D7=0决定)。
使用时,一般定位在$0000开始的1K中。 因为前256个字节可以用直接地址(8 bit地址)访问,如果
Z: 0标志,当运算结果为0时,该位置1。
V: 2补码运算溢出标志,当运算结果出现2补码溢出时,该位置1。
飞思卡尔单片机教学第3章_指令系统自学
如:
LDAA
$55
;表示将零页$0055内存单元的数据加载到累加器A。 也可以表示为:
LDAA <$55
;“<”在老版本CodeWarrior中表示零页寻址,新版本 中不需要加“<”。
7
第三章 MC9S12单片机指令系统
直接寻址举例
LDAA $55 执行前:[55]=0,A=CB 执行后:[55]=0,A=0
– LEAX :将有效地址加载到变址寄存器X
例如: LEAX D,Y ;将Y的内容加上D的内容加载到X寄 存器
– LEAY :将有效地址加载到变址寄存器Y
例如:LEAY 存器
B,X ;将X的内容加上B的内容加载到Y寄
21
第三章 MC9S12单片机指令系统
数据传输指令7
堆栈操作指令:
– 单字节压栈出栈
#$55;表示将十六进制立即数$55加载到累加器A中
LDX
#1234;表示将十进制数1234加载到累加器X中
LDY
#%01010101;表示将二进制数00100110加载到累
加器Y中
注:立即数前加#
6
第三章 MC9S12单片机指令系统
直接寻址
零页寻址,范围是$00~$ff,共256个单元,一般访问I/O寄 存器。
0, X
;A=[$1000]
LDAA
7, X
;A=[$1000+7]
LDAA
-150, X
;A=[$1000-150]
LDAA
1000, X
;A=[$1000+1000]
LDAA
[1000,X] ;将X+1000地址单元中的
;值作为指针,指向的内存单元的值加载到累加器A中 5位偏移量隐含在指令字节中(2字节指令) 9位偏移量多占一个字节(3字节指令)
飞思卡尔K60入门资料课件

将JTAG调试器连接到计算 机,并下载和安装相应的 驱动程序。
打开Keil MDK-ARM软件 ,创建一个新项目,选择 正确的芯片型号(K60), 并配置项目属性,如工作 空间、工具链等。
使用串口通信线将开发板 与计算机连接起来,以便 在开发过程中进行调试和 数据传输。
使用Keil MDK-ARM软件 编写代码,并进行编译和 调试。
K60在图像处理中的应用
K60芯片具有高速的图像处理能力,可以用于实现各种图像处理算 法,如图像增强、目标检测、人脸识别等。
图像处理实例代码
提供一些基于K60芯片的图像处理实例代码,包括图像增强、目标 检测等。
通信系统实例
通信系统概述
通信系统是实现信息传输和交换的技术体系,包括无线通信、有 线通信、卫星通信等。
软件问题及解决方案
总结词
软件问题通常涉及到编程环境、编译错误、烧录程序等,需要检查软 件配置和代码错误。
编程环境配置
确保你使用的编程环境(如IAR Embedded Workbench、Keil uVision等)已正确配置,包括驱动程序安装、工具链设置等。
编译错误
检查代码是否有语法错误或逻辑错误,仔细阅读编译器给出的错误提 示,定位并修复问题。
K60在通信系统中的应用
K60芯片具有高速的通信接口和强大的数据处理能力,可以用于实 现各种通信系统,如无线通信网络、卫星通信系统等。
通信系统实例代码
提供一些基于K60芯片的通信系统实例代码,包括无线通信网络协 议栈的实现、卫星通信系统的数据处理等。
05
K60芯片常见问题及解决方案
硬件问题及解决方案
开发环境常见问题及解决方案
1. Keil MDK-ARM软件安装问题:确保从官方网 站下载正确的版本,并按照安装向导进行操作。 如果遇到问题,可以查阅Keil官方文档或寻求技 术支持。
培训资料 北航飞思卡尔培训ppt

电路、电源电路、电磁传感器、以及一些其他的可能模块),
可以使用指定的现成模块(线性CCD,摄像头,按键(最好 自己画)、OLED显示屏、超声波传感器)等。(以规则为主)
几点建议(续)
• 5、建议的芯片:一般K60比较多,如果用的话,大家可
以用K60DN512的芯片,最小系统板建议用一样的,因 为会有很大可能烧芯片,到时候方便更换。
PE和IAR配合使用
• 教程:/module/forum/thread-缺点:有BUG,PE是英文,配置元件和模块的时候上手可能比较难 • 已知bug1:在已有的工程上,PE新生成的一些component可能无法 自动更新到IAR工程上 • 解决办法:重新connect info文件 • 已知bug2:当开着IAR时(IAR打开了指定的工程),在PE已有的工 程基础上,新生成component或者更改component的配置的时候, 会出现IAR无法编译链接时候的出错 • 解决办法:关掉IAR工程,PE重新生成代码,打开IAR(必要的时候可 能要重复bug1的解决办法)
• 6、9s12芯片也是建议的,kl26芯片也是可以的,我们
还用过kl46,kl系列资料较少,相对而kl26资料多一点。
• 7、电池的接口最好要统一,不统一也可以做转接头,这 样队伍之间可以通用,千万注意正负极 • 8、希望组与组之间进行讨论交流,不同项目的队伍之间 也可以交流。
几点建议(续)
• 9、选用管脚的时候,注意管脚冲突的问题。下载器的调
• SI下降沿 开始输入采集到的电压值
线性CCD TSL1401
• 一般模块基本是5根引脚,也有6根引脚的出现
GND GND VCC SI AO CLK VCC AO AO2 SI CLK
第四届飞思卡尔智能车大赛 培训资料

车大赛官方网站
考核办法 开学两பைடு நூலகம்内上交智能车设计报告(根据假期收 集资料) 第三周将根据报告内容安排面试
LOGO
欢迎提问
入门参考书
工作内容
智能车
总体设计
硬件设计
传感器 电动机驱动 舵机转向 单片机外围电路 电源电路 控制及显示电路
软件设计
各部分驱动程序设计 算法设计 各功能模块设计
学习方法
以自学研究为主, 以自学研究为主,指导老师提供指导意见 看书
挑战“ 《学做智能车——挑战“飞思卡尔”杯》 学做智能车 挑战 飞思卡尔”
比赛使用组委会统一提供的车模、舵机、直流电机以及单片机、 比赛使用组委会统一提供的车模、舵机、直流电机以及单片机、 开发软件和在线调试工具, 开发软件和在线调试工具,保证参赛队伍在一个基本相同的硬 件平台上制作自己的智能车。 件平台上制作自己的智能车。
知识体系构成
汽车原理
电子技术
智能车
嵌入式系统 测试技术 (传感器) 数学建模
LOGO
第四届“飞思卡尔杯” 第四届“飞思卡尔杯”全国大学生智能车竞赛
简要介绍及初步辅导
辽宁工程技术大学 机械工程学院车辆工程系
基本内容
1 2 3 4 赛事简介 个人要求 工作内容 学习方法
赛事简介
智能车大赛来自韩国,最早是由韩国汉阳大学举办的, 智能车大赛来自韩国,最早是由韩国汉阳大学举办的,面向韩国 各个大学。 年这个比赛登陆中国, 各个大学。2006年这个比赛登陆中国,经过教育部批准,由飞思 年这个比赛登陆中国 经过教育部批准, 卡尔半导体公司赞助,由清华大学协办, 卡尔半导体公司赞助,由清华大学协办,在清华大学举办了第一 飞思卡尔”杯智能车车大赛。这个比赛主题很简单, 届“飞思卡尔”杯智能车车大赛。这个比赛主题很简单,要求参 赛选手在组委会提供的车模和相关部件平台下, 赛选手在组委会提供的车模和相关部件平台下,制作一辆可以自 主识别赛道的寻线小车,在比赛规定的赛道上进行竞速比赛, 主识别赛道的寻线小车,在比赛规定的赛道上进行竞速比赛,单 圈成绩最好的车获得冠军。 圈成绩最好的车获得冠军。
考核办法 开学两பைடு நூலகம்内上交智能车设计报告(根据假期收 集资料) 第三周将根据报告内容安排面试
LOGO
欢迎提问
入门参考书
工作内容
智能车
总体设计
硬件设计
传感器 电动机驱动 舵机转向 单片机外围电路 电源电路 控制及显示电路
软件设计
各部分驱动程序设计 算法设计 各功能模块设计
学习方法
以自学研究为主, 以自学研究为主,指导老师提供指导意见 看书
挑战“ 《学做智能车——挑战“飞思卡尔”杯》 学做智能车 挑战 飞思卡尔”
比赛使用组委会统一提供的车模、舵机、直流电机以及单片机、 比赛使用组委会统一提供的车模、舵机、直流电机以及单片机、 开发软件和在线调试工具, 开发软件和在线调试工具,保证参赛队伍在一个基本相同的硬 件平台上制作自己的智能车。 件平台上制作自己的智能车。
知识体系构成
汽车原理
电子技术
智能车
嵌入式系统 测试技术 (传感器) 数学建模
LOGO
第四届“飞思卡尔杯” 第四届“飞思卡尔杯”全国大学生智能车竞赛
简要介绍及初步辅导
辽宁工程技术大学 机械工程学院车辆工程系
基本内容
1 2 3 4 赛事简介 个人要求 工作内容 学习方法
赛事简介
智能车大赛来自韩国,最早是由韩国汉阳大学举办的, 智能车大赛来自韩国,最早是由韩国汉阳大学举办的,面向韩国 各个大学。 年这个比赛登陆中国, 各个大学。2006年这个比赛登陆中国,经过教育部批准,由飞思 年这个比赛登陆中国 经过教育部批准, 卡尔半导体公司赞助,由清华大学协办, 卡尔半导体公司赞助,由清华大学协办,在清华大学举办了第一 飞思卡尔”杯智能车车大赛。这个比赛主题很简单, 届“飞思卡尔”杯智能车车大赛。这个比赛主题很简单,要求参 赛选手在组委会提供的车模和相关部件平台下, 赛选手在组委会提供的车模和相关部件平台下,制作一辆可以自 主识别赛道的寻线小车,在比赛规定的赛道上进行竞速比赛, 主识别赛道的寻线小车,在比赛规定的赛道上进行竞速比赛,单 圈成绩最好的车获得冠军。 圈成绩最好的车获得冠军。
飞思卡尔kinetis_内部培训资料_SIM部分

SIM (System Integration Module) 模块培训材料
SIM模块采用粘合逻辑与Kinetis芯片绝大部分模块联系,提供四个主要功能:SIM模块采用粘合逻辑与Kinetis芯片绝大部分模块联系,提供四个主要功能:
∙系统和模块时钟配置;
∙模块配置(模块管脚配置和时钟源选择);
∙片上系统配置;
∙芯片信息。
SIM模块系统和模块时钟配置功能包括:
1.配置系统时钟,总线时钟,外部总线时钟和Flash时钟工作频率;
2.控制大部分Kinetis模块时钟选通,可以关闭不用模块时钟降低芯片运行模式下功
耗;
3.MCG时钟模块时钟源选择,MCG外部参考时钟源来自系统振荡器或RTC振荡器。
SIM模块配置功能包括:
1.UART输出管脚驱动能力控制;
2.UART输入输出源选择和配置;
B电压源模块配置(使能,工作模式);
4.FlexTimer外部时钟,输入捕获,故障源选择;
5.ADC模块触发源选择。
SIM模块片上系统配置包括:
1.外部总线安全级别设定(是否允许指令和数据总线访问);
2.外部复位管脚信号滤波配置。
SIM模块芯片信息包括芯片版本,Kinetis家族类别(K10,K20等),封装形式,128-bit 独一无二ID(可以用作客户产品序列号)。
飞思卡尔智能车入门资料大全概要
计算机控制技术、单片机技术、C语言、 传感器与检测技术、电机与拖动、模数电 及电路基础、自动控制理论、机械设计基 础等学科
1.2.2 动手能力和创新能力 常见电源电路和驱动电路设计 新的一些寻迹算法的提出等
二、硬件系统设计与实现
1)电源部分 2)电机驱动部分 3)舵机部分 4)图像采集部分 5)测速部分
1k
OUT1 CC P1 OUT2 33n VS S VS S D1 D2 47uF 47u VS S C3 0.1u GND GND C1 GND
GND 6 5 4 3 2 1 GND VC C PWM7 PWM5 D2 D1
20 DNC 4 V+ 5 V+ 16 V+ 18 D1 13 D2
R2 VC C
正确放电:
由于镍镉电池具有记忆效应,对电池的不完全放电将会人 为的降低电池的电容量; 从放电曲线可以看出,随着电池电量的减少,其电压也会 逐渐降低,当电压降低到某个阈值后继续放电,电池电压 将很快的跌落。这个阈值就是电池的放电下限电压。厂家 给出了放电下限电压为6V。因此,在使用时,建议在动力 车的电源设计中加入电池保护电路,当电池电压低于6V时 切断电路,用来保护电池。如果没有保护电路,要注意, 电池接通时人不要离开。因为当电池电压降到接近6V时, 电池已经给不出多少电流,已经没有能力驱动电机了,此 时一定要及时断开电路,到了给电池充电的时候了。
舵机控制方法
三线连接方式 红线:电源线+6V 蓝线:地线 黑线:PWM控制信号
2.2.2驱动芯片BTS7960/7970组成的电路
大功率驱动芯片BTS7970特性如下: 输入电压:6v---24v 输出电流: 最大可达60A 内阻:16毫欧 控制线电压: 5v PWM控制频率:25K
1.2.2 动手能力和创新能力 常见电源电路和驱动电路设计 新的一些寻迹算法的提出等
二、硬件系统设计与实现
1)电源部分 2)电机驱动部分 3)舵机部分 4)图像采集部分 5)测速部分
1k
OUT1 CC P1 OUT2 33n VS S VS S D1 D2 47uF 47u VS S C3 0.1u GND GND C1 GND
GND 6 5 4 3 2 1 GND VC C PWM7 PWM5 D2 D1
20 DNC 4 V+ 5 V+ 16 V+ 18 D1 13 D2
R2 VC C
正确放电:
由于镍镉电池具有记忆效应,对电池的不完全放电将会人 为的降低电池的电容量; 从放电曲线可以看出,随着电池电量的减少,其电压也会 逐渐降低,当电压降低到某个阈值后继续放电,电池电压 将很快的跌落。这个阈值就是电池的放电下限电压。厂家 给出了放电下限电压为6V。因此,在使用时,建议在动力 车的电源设计中加入电池保护电路,当电池电压低于6V时 切断电路,用来保护电池。如果没有保护电路,要注意, 电池接通时人不要离开。因为当电池电压降到接近6V时, 电池已经给不出多少电流,已经没有能力驱动电机了,此 时一定要及时断开电路,到了给电池充电的时候了。
舵机控制方法
三线连接方式 红线:电源线+6V 蓝线:地线 黑线:PWM控制信号
2.2.2驱动芯片BTS7960/7970组成的电路
大功率驱动芯片BTS7970特性如下: 输入电压:6v---24v 输出电流: 最大可达60A 内阻:16毫欧 控制线电压: 5v PWM控制频率:25K
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
复位高电平
ZZTI 14
郑 州
飞思卡尔单片机使用
• 官网:
– 飞思卡尔半导体/
• 开发工具 CodeWarrior
– 下载:CW_S12_v5.0_Special(3).exe
– 安装:----
• BDM调试器
首创科技光盘资料
– 安装驱动:USBDMrelease\driver
复位后端口为IO口输入,子系统使能 后,自动变更为专用功能口。
ZZTI 5
郑 州
管 脚 图
ZZTI 6
郑 州
单片机端口配置
ZZTI 7
郑 州
最小系统管脚接线图
ZZTI 8
郑 州
引脚
ZZTI 9
郑 州
常用引脚
ZZTI 10
郑 州
背面焊接
ZZTI 11
郑 州
• 概述
IO口设置
– PORTA,PORTB做IO,T,P,AD功能不变
ZZTI 30
郑 州
PWM模块
• 作用:
– 硬件方法产生PWM,控制电机
U0
ZZTI 31
郑 州
PWM产生原理
• 计数器 • 周期 • 比较值 • 原理:当计数器值=比较值时,电平翻转
计数值 周期
比较值
0
连续增计数方式
连续增减计数方式
ZZTI 32
郑 州
PWM产生
• 起始电平:高
周期
计数值
比较值 0
7
6
5
4
3
2
1
0
• PORTB PB7 PB6 PB5 PB4 PB3 PB2 PB1 PB0
• DDRB
76543210
DDRB7 DDRB6 DDRB5 DDRB4 DDRB3 DDRB2 DDRB1 DDRB0
7
6
5
4
3
2
1
0
位访问方法:例PORTA_PA0
ZZTI 13
郑 州
第一个练习
• 点亮一盏灯 • PB3口 • 输出DDRB=0x0f; 亮灯:PORTB=0x00;
ZZTI 29
郑 州
时钟设置典型程序2
// 80M主频 CLKSEL_PLLSEL=0; //系统时钟=晶振/2 PLLCTL_PLLON=1; //允许锁相环 SYNR =0xc0 | 0x09; REFDV=0x80 | 0x01; POSTDIV=0x00; _asm(nop); _asm(nop); while(!(CRGFLG_LOCK==1));//等待系统稳定 CLKSEL_PLLSEL =1; //系统时钟=PLLCLK/2
• AB口IO设置
– 输入输出: (1位对应一个端口)
• 方向寄存器A口- DDRA, B口- DDRB
• 0输入,1输出
– 输出时的驱动能力(1位对应一口-RDRIV[1];
• 1全额驱动能力,0缩减(全额/3)驱动能力
– 上拉电阻控制 (1位对应一组端口)
ZZTI 15
郑 州
最小系统板使用
• 电路板 • 电源 • 系统板及插座 • 电阻,LED
ZZTI 16
郑 州
• 运行程序
操作过程
ZZTI 17
郑 州
ZZTI 18
郑 州
ZZTI 19
郑 州
ZZTI 20
郑 州
CodeWarrior
ZZTI 21
郑 州
写程序、编译、连接、下载
ZZTI 22
ZZTI 1
郑 州
飞思卡尔智能车_单片机篇
ZZTI 2
郑 州
飞思卡尔单片机
• 8位单片机
– 51,宏晶,C8051,AVR
• 16位单片机
– 飞思卡尔9S12XS128,ARM,430,DSP2000
最小系统板
BDM调试器
ZZTI 3
郑 州
飞思卡尔单片机
• MC9S12sx128:16位单片机 • 系统时钟:晶振16M,总线时钟可到80M
PWM
ZZTI 33
郑 州
PWM产生原理
• 起始电平:低
周期
计数值
比较值 0
PWM
ZZTI 34
郑 州
PWM模块
• 8路PWM • 8位
ZZTI 35
郑 州
PWM寄存器设置
• PWM允许:1允许,0禁止
• 极性:0起始低,1起始高
• 居中对齐:0左对齐,1居中对齐
• 周期寄存器PWMPERx :8位
– 模块时钟:可对系统时钟分频
• 功能及模块
– IO端口 – PWM – ECT – PIT – ATD – SCI
ZZTI 4
郑 州
端口控制
• 概述
– A、B:通用IO – E: – AD:ATD模块 –K – T:TIM模块 – P:PWM模块 – S:SCI模块 –M
–J
–H
端口作用:IO(输入,输出),功能口
BUSCLK=PLLCLK/2
ZZTI 27
郑 州
SYNR与REFDIV高位
• FVCO=2*FOSC*(SYN+1)/(REF+1)
FVCO
32-48M 48-80M 保留
SYNR[7-4] 0x00
0x40
0x80
80-120M 0xC0
– SYNR =0xc0 | 0x04;
• FREF=FOSC/(REFDIV + 1)
郑 州
ZZTI 23
郑 州
程序调试界面
ZZTI 24
郑 州
效果图
ZZTI 25
郑 州
单片机时钟
ZZTI 26
郑 州
总线时钟频率
• 总线时钟:可编程改变(一般最大80M) – 时钟合成寄存器SYNR低4位 – 时钟分频寄存器REFDV低4位
PLLCLK=2*OSCCLK*(1+SYNR)/(1+REFDV)
• A口-PUCR[0];B口-PUCR[1];
• 1使用,0不使用
ZZTI 12
郑 州
端口的位访问
• PORTA • DDRA
PA7 PA6 PA5 PA4 PA3 PA2 PA1 PA0 76543210
DDRA7 DDRA6 DDRA5 DDRA4 DDRA3 DDRA2 DDRA1 DDRA0
• 比较值寄存器PWMDTYx : 8位
ZZTI 36
郑 州
PWM时钟
• 时钟选择
FREF
1-2M
REFDIV[7-4] 0x00
2-6M 0x40
6-12M 0x80
– REFDV=0x80 | 0x01;
>12M 0xC0
ZZTI 28
郑 州
时钟设置典型程序1
// 24M主频 CLKSEL_PLLSEL=0; //系统时钟=晶振/2 PLLCTL_PLLON=1; //允许锁相环 SYNR =0x40 | 0x02; REFDV=0x80 | 0x01; POSTDIV=0x00; _asm(nop); _asm(nop); while(!(CRGFLG_LOCK==1));//等待系统稳定 CLKSEL_PLLSEL =1; //系统时钟=PLLCLK/2