通用上下料气动机械手结构设计
薄板件冲压机上下料机械手设计

薄板件冲压机上下料机械手设计本文将介绍《薄板件冲压机上下料机械手设计》的主题和背景。
薄板件冲压机上下料机械手是一种自动化设备,用于将薄板件从原料堆放区取出,并送入冲压机进行加工。
随着工业自动化水平的不断提高,薄板件冲压机上下料机械手在企业生产中扮演着越来越重要的角色。
本文将重点探讨薄板件冲压机上下料机械手的设计原理、结构和工作流程。
通过对机械手的设计和优化,可以提高生产效率、降低劳动强度、减少人为错误,最终实现生产过程的自动化和智能化。
希望本文能为读者提供关于薄板件冲压机上下料机械手设计的详细解读,帮助读者更好地理解和应用这一自动化设备。
同时,读者也可以根据本文的内容,进一步研究和改进薄板件冲压机上下料机械手的设计方法,推动工业自动化技术的发展。
设计要求本文旨在设计一台薄板件冲压机上下料机械手,其功能和性能需满足以下要求:精确定位:机械手需要能够准确地定位薄板件,以确保准确的上下料操作。
快速操作:机械手需要具备快速的动作响应速度,以提高生产效率。
高负载能力:机械手需要能够承受高负载,以应对不同尺寸和重量的薄板件。
稳定性和精度:机械手的运动应具备稳定性和精度,以确保在上下料过程中不损坏薄板件或其他设备。
安全性:机械手需要具备安全保护功能,防止发生意外事故。
高可靠性和耐久性:机械手应具备高可靠性和耐久性,以满足长时间连续运行的需求。
灵活性:机械手需要具备灵活性,能够适应不同类型和尺寸的薄板件的上下料操作。
兼容性:机械手需要与现有的薄板件冲压机配套使用,并能够与其他设备进行良好的协同工作。
以上是设计一台薄板件冲压机上下料机械手所需满足的功能和性能要求。
本部分描述了机械手的整体结构设计,包括关键组件和连接方式等。
机械手的整体结构设计应考虑以下关键组件:基座:提供机械手的支撑和稳定性。
臂架:连接基座和末端执行器的关键组件,负责机械手的运动。
末端执行器:用于抓取和搬运薄板件的工具部分。
关键组件的连接方式应满足以下要求:基座和臂架之间的连接应牢固可靠,以保证机械手的稳定性。
车床上下料机械手的设计(全套图纸)

摘要对工业机械手各部分机械结构和功能的论述和分析,设计了一种圆柱坐标形式机械手。
重点针对机械手的立柱、手臂、手爪等各部分机械结构以及机械手控制系统进行了详细的设计。
具体进行了机械手的总体设计,立柱结构的设计,机械手手臂结构的设计,末端执行器(手爪)的结构设计,机械手的机械传动机构的设计,机械手驱动系统的设计。
同时对液压系统和控制系统进行了理论分析和计算。
基于PLC对机械手的控制系统进行了深入细致的设计,通过对机械手作业的工艺过程和控制要求的分析,设计了控制系统的硬件电路,同时编制了机械手的控制程序,达到了设计的预期目标。
关键词:机械手,可编程控制器PLC,液压伺服定位,电液系统AbstractIntegratting the knowledge of the past four years of Machine, discuss and analysis the each part and function of manipulator; design a kind of cylinderical coordinate manipulator used to pack and unload work piece for CNC machine tools. In particular, made the detailed design about base, arm, and end effector and the control system etc. including Total design, waist’s construction design, the arm’s construction design, the wrist’s constr uction design, the end effector’s construction design, and the drive system of manipulator. At the same time, analysis and compute the hydraulic pressure system and control system. Deeply design the manipulator’s control system, which based on PLC. After analysis about the craft process and the requests of the manipulator, the hardware circuit and the control program of the manipulator then is designed. In a word, the design of the manipulator has come to the anticipant object.Keyways: Manipulator, Programmable Logic Controller, Hydraulic servo control, Electrohydraulic system目录摘要 (1)Abstract (2)1 绪论 (1)1.1 选题背景 (1)1.2 设计目的 (1)1.3 国内外研究现状和趋势 (2)1.4 设计原则 (4)2 工业机械手的总体设计方案 (5)2.1 工业机械手传动方案设计 (5)2.2 工业机械手运动方案设计 (5)3 机械手结构设计 (9)3.1各执行部件(液压缸)的类型选择 (9)3.2 各执行部件之间的联接和固定方式设计 (9)3.3 手部的结构设计、计算及选型 (9)3.4 小手臂的结构设计、计算及选型 (13)3.5 大手臂的结构设计、计算及选型 (18)3.6 回转缸的结构设计、计算及选型 (20)4 液压系统设计 (25)4.1 液压系统的组成 (25)4.2 液压系统的特点 (26)4.3 拟定液压系统 (26)4.4 液压系统控制元件的选型 (27)4.5 液压控制原理及过程说明 (29)4.6 油缸泄露问题与密封装置 (30)4.7 管路布置 (31)5 PLC控制系统设计 (32)结论 (34)致谢 (35)参考文献 (36)1 绪论1.1 选题背景机械手是在自动化生产过程中使用的一种具有抓取和移动工件功能的自动化装置,它是在机械化、自动化生产过程中发展起来的一种新型装置。
浅议数控机床上下料机械手的机械结构设计
有一定 的速度 , 其 工作 空间 的形状 和大小 与机 械手手 臂 的长
度、 手 臂 关 节 的转 动 范 围有 密 切 的 关 系 , 因此 手 臂 尺 寸 设 计 应
大 的夹紧力 , 其通常与弹簧联合使用 。手爪 的具体 结构形式如
1 4 0
s n e j t y u e n x ● ■ ■ ■ ■ ■ ■ ■ ■ ■ ■ ● 主 ● ■ ■ ■ ■ 坌 ■ ■ ■ ■ 堑 ■ ■ ■ ● 雾 ● 一
满 足其工作 空间要求 。同时, 为了提高机械手 的运动速度 与控 制精度 , 应在保证机 械手手 臂有足 够强度 和刚度 的条 件下 , 尽 可能在结构 上、 材料 上设法 减轻手 臂的重 量 ; 为提高机 械手 手
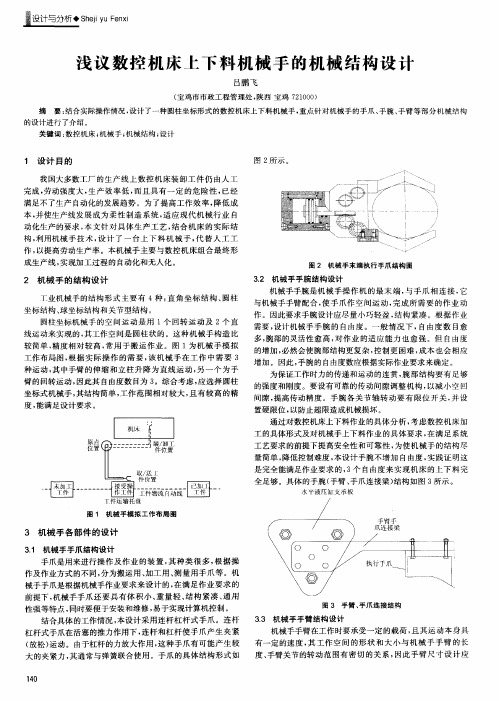
图2 所示 。
满 足不 了生产 自动化 的发展趋势 。为了提高工作效率 , 降低成
本, 并使 生产 线 发 展 成 为 柔 性 制 造 系 统 , 适应 现代机械行 业 自
动化生产 的要求 , 本文针对 具体生产 工艺 , 结合 机床 的实际结
构, 利 用 机械 手 技 术 , 设 计 了一 台上下 料机 械手 , 代 替人 工工
的设计 进行 了介绍 。 关 键词 : 数 控机 床 ; 机 械手 ; 机 械结构 ; 设计
1 设 计 目 的
我 国大 多数 1 厂 的 生 产 线 上 数 控 机 床 装 卸 工 件 仍 由 人 工 完成 , 劳 动强 度 大 , 生产效 率低 , 而且具有一 定的危 险性 , 已 经
的强 度 和 刚度 。要 设 有 可靠 的传 动 间 隙调 整 机 构 , 以减 小 空 回
间隙, 提高传动精度 。手腕 各关节轴转 动要有 限位开关 , 并 设
上下料机械手设计(结构设计)任务书 (22)
各阶段工作任务
起止日期
查阅资料,完成总体方案的设计,撰写开题报告。
3.5-3.18
完成液压控制系统和气动机械手装配图。
3.19-4.15
完成机械手的结构设计,主要参数确定。
4.16-5.10
完成机械手传动方式的论证和选择,机械手各结构的设计计算。
5.11-5.18
设计修改完善,完成论文终稿。
3、该机械手能抓取重物,机械手的双臂可同时升降并在水平面内一起作90°回转,升降动作;装在手臂前端的手,可作夹紧或松开工件的开闭动作;
主要任务及目标
1、完成上下料机械手的整体设计,包括:手部、手腕、手臂和机身等结构部件的设计。
2、用CAD完成机械手的总装配图,零件图。
[1]孙志礼,冷兴聚,魏延刚等.机械设计[M].沈阳:东北大学出版社,2016:19-25.
[2]刘朝儒,彭福荫,高政一.机械制图[M].北京:高等教育出版社,2016:25-30.
[3]李允文.工业机械手设计.机械工业出版社[M],2017. 88-97
[4]孙桓陈作模.机械原理[M].高等教育出版社,2016.145-151.
附件3
毕业论文(设计)任务书
学生姓名
指导教师姓名
论文(设计)题目
上下料机械手设计(结构设计)
下达任务日期
任务起止日期
主要研究内容及方法
1、是为普通车床而设计的一种自动上下料装置的机械手;
2、对机械手进行了总体方案的设计,确定坐标型式、自由度和机械手的技术参数,确定该机械手的手臂的回转机构和升降机构,及手部结构。
5.19-5.26
任务下达人签名
任务接收人
签名
教研室指导小组组长签名
数控机床上下料机械手设计

数控机床上下料机械手设计前言随着工业的不断发展和升级,机械制造产业已经成为了各国经济发展不可或缺的重要组成部分。
数控机床则是机械制造产业中的重要设备之一。
而数控机床上下料机械手,作为数控机床的附属设备,它的功能是在机床的输入、输出端之间自动输送加工件,减少了人力,提高了加工效率,为制造行业带来了极大的便利和效益。
本文将介绍数控机床上下料机械手的设计过程。
设计思路首先,在设计机械手之前,我们需要了解机械手的结构和工作原理。
1.机械手结构数控机床上下料机械手的结构一般分为机械手臂、机械手控制系统、夹手器、传感器和运动轴等主要部分。
其中,机械手臂是机械手的核心部件,它的结构一般采用铝合金或者碳纤维材料制作,具有较高的强度和刚度,能够承受较大的载荷;机械手控制系统则是机械手的智能核心,能够根据预设的程序进行自动化控制;夹手器则是机械手的末端执行器,用于夹持加工件;传感器则可以对加工件的位置、形状等进行检测和反馈;而运动轴则是机械手的实际运动部分,能够实现机械手的动作。
2.机械手工作原理数控机床上下料机械手的工作原理是通过控制机械手臂的运动轴和夹手器的打开、关闭,来实现机械手夹取、放置加工件的过程。
在机械手的控制系统中,我们可以预设机械手的运动轨迹和夹手器的运动规律,当接收到工艺指令后,机械手会按照预设的程序自动地执行加工件的夹取和放置操作。
在了解了机械手的结构和工作原理之后,我们可以开始设计机械手的具体实现方案。
设计方案1.机械手臂结构设计机械手臂的结构设计是机械手整体设计中的核心环节之一。
在设计机械手臂时,我们需要考虑以下几个方面:•材料的选择。
由于机械手臂需要具备较强的承载能力和刚度,因此在材料的选择上,我们可以考虑采用铝合金或者碳纤维等高强度材料,来满足机械手的结构要求。
•结构的设计。
机械手臂的结构设计需要采用工程力学理论,考虑机械手的承重和刚度等因素。
在结构设计中,需要确定机械手臂的长度、形状和悬挂方式等关键参数,保证机械手的稳定运行和准确夹取加工件的能力。
数控机床上下料机械手设计

数控机床上下料机械手设计2.3机械手手腕结构的设计机械手手腕是机械手操作机的最末端,与手爪相连接,它与机械手手臂配合,使手爪在空间运动,完成所需要的作业动作。
2.3.1手腕结构的设计要求1、由于手腕安装在机械手末端,因此要求手腕设计应尽量小巧轻盈,结构紧凑。
2、根据作业需要,设计机械手手腕的自由度。
一般情况下,自由度数目愈多,腕部的灵活性愈高,对对作业的适应能力也愈强。
但自由度的增加,必然使腕部结构更复杂,控制更困难,成本也会相应增加。
因此,手腕的自由度数,应根据实际作业要求来确定。
3、为实现腕部的通用性,要求有标准的连接法兰,以便于和不同的机械手手爪进行连接。
4、为保证工作时力的传递和运动的连贯,腕部结构要有足够的强度和刚度。
5、要设有可靠的传动间隙调整机构,以减小空回间隙,提高传动精度。
6、手腕各关节轴转动要有限位开关,并设置硬限位,以防止超限造成机械损坏。
2.3.2具体设计方案通过对数控机床上下料作业的具体分析,考虑数控机床加工的具体形式及对机械手上下料作业时的具体要求,在满足系统工艺要求的前提下提高安全和可靠性,为使机械手的结构尽量简单,降低控制的难度,本设计手腕不增加自由度,实践证明这是完全能满足作业要求的,3个自由度来实现机床的上下料完全足够。
具体的手腕(手臂手爪联结梁)结构见图2-4。
2.4机械手手臂结构的设计2.4.1手臂结构的设计要求机械手的手臂在工作时,要承受一定的载荷,且其运动本身具有一定的速度,因此,机械手手臂的设计需要遵循以下设计要求:1、工作空间的形状和大小与机械手手臂的长度,手臂关节的转动范围有密切的关系,因此手臂尺寸设计应合理,一般满足其工作空间即可。
2、为了提高机械手的运动速度与控制精度,应在保证机械手手臂有足够强度和刚度的条件下,尽可能在结构上、材料上设法减轻手臂的重量。
3、应尽可能使机械手手臂各关节轴相互平行;相互垂直的轴应尽可能相交于一点,这样可以使机械手运动学正逆运算简化,有利于机械手的控制。
数控车床上下料机械手设计_毕业设计
1.3机械手的分类
1.根据用途不同分类
机械手按用途主要分为三类:第一类为通用机械手,它是一种不依赖于主机的独立装置,可以根据需要编写控制程序,完成所需的功能,这类机器人有球坐标式、圆柱坐标式和直角坐标式等多种形式,主要由基座、腰关节、大臂、小臂以及手爪等组成,在三维空间里具有很好的灵活性和通用性,因此具有广泛的应用,对于该类机器人的研究和应用已经颇为成熟,由于其良好的通用性,只要在手爪部位安装合适的装置即可完成相应的功能。
关键词:数控车床;机械手;气动元件;伺服电机
ABSTRACT
This designmainly aims at the manipulator of the CNC lathe processing rotor of loading process, and analysis the motion process of workpiece by the production line to the workbench. Mainly adopts pneumatic components, gas, manipulator grasping and flip functions such as oscillating cylinder, servo motor and ball screw is used to implement manipulator transverse shift, in order to realize the movement of the scheme. Through the design of manipulator used in CNC lathe design steps and methods of systematic knowledge, according to its design manipulator that economy is applicable, and the cylinder of the structure and working principle of the comprehensive control.
自动上下料机械手毕业设计
自动上下料机械手毕业设计一、需求分析随着工业自动化水平的提高,自动上下料机械手在工业生产线上的作用越来越重要。
自动上下料机械手能够替代人工完成重复的上下料工作,提高生产效率和产品质量。
因此,设计一个具有自动上下料功能的机械手成为了当前毕业设计的热门课题之一二、系统结构设计在设计自动上下料机械手之前,需要先明确机械手的结构和工作原理。
1.结构设计2.工作原理机械手的工作原理主要分为三个步骤:识别物体位置、抓取物体、放置物体。
a.物体识别机械手需要通过视觉系统或传感器来识别需要上下料的物体位置。
视觉系统可以通过图像处理技术识别物体的形状、颜色和位置信息,传感器可以通过接触或非接触方式感知物体的位置。
b.抓取物体机械手通过夹爪对物体进行抓取。
夹爪可以采用机械夹持、气动夹持或电磁夹持等方式来完成抓取动作。
在抓取物体时需要注意夹爪的力度和抓取位置,以确保物体不会被损坏或滑落。
c.放置物体机械手将抓取的物体放置到目标位置。
在放置物体时同样需要注意放置位置和力度,以确保物体能够准确放置到目标位置。
三、技术选型在设计自动上下料机械手的过程中,需要选取合适的技术和材料。
1.机械结构机械结构可以采用金属、塑料或复合材料制作,具体选材要根据机械手的负荷和精度要求来决定。
2.夹爪夹爪可以根据具体应用选择合适的类型,例如并行夹爪、夹具夹爪或磁力夹爪等。
3.控制系统机械手的运动控制系统可以采用单片机、PLC或伺服电机控制等方式。
选择控制系统时需要考虑运动速度、精度和整体效率等因素。
四、系统实现在设计完机械手的结构和选型之后,需要进行系统的实现。
1.机械结构制作根据设计要求制作机械手的机械结构,包括机械臂、夹爪和固定装置等。
2.控制系统搭建根据选定的控制系统,搭建机械手的运动控制系统。
可以通过编程、电路连接和传感器安装等方式完成。
3.调试和测试完成机械手的组装后,进行调试和测试。
通过调试和测试可以发现和解决机械手运动、抓取和放置等环节出现的问题,并对系统进行优化和改进。
数控车床自动上下料机械手结构设计
数控车床自动上下料机械手结构设计首先,在设计机械手的结构时,需要考虑机械手的运动自由度。
通常情况下,机械手需要具备至少4个自由度,包括水平滑台运动、垂直滑台运动、夹具旋转和夹具开合等运动。
这样可以保证机械手可以在不同方向上进行运动,以满足不同工件的上下料需求。
其次,机械手的运动方式也需要进行合理的设计。
常见的机械手运动方式有直线运动和旋转运动。
在数控车床自动上下料机械手中,通常选择导轨和丝杠组合的方式实现机械手的水平滑台和垂直滑台运动,以保证稳定性和精度。
夹具的旋转可以通过电机和减速机组合实现,使夹具可以在水平方向上进行旋转。
夹具的开合则可以通过气动或液压系统来实现,以提高开合速度和准确度。
再次,机械手的控制系统需要具备高效、稳定和智能化的特点。
控制系统需要能够准确地控制机械手的运动,以达到预定的上下料速度和精度。
同时,控制系统还需要具备自动化和智能化的功能,可以根据生产需求进行灵活的调整和优化。
使用传感器和编码器等设备对机械手的运动状态进行实时监测和反馈,以实现闭环控制,提高机械手的稳定性和精度。
最后,机械手的安全性也是设计中需要考虑的重要因素。
机械手在工作过程中需要与操作人员和其他设备进行安全隔离,防止意外伤害的发生。
同时,机械手还需要具备急停、紧急停机和故障诊断等安全保护功能,以保障操作人员和设备的安全。
综上所述,数控车床自动上下料机械手的结构设计需要兼顾高效、稳定、安全和智能化的要求。
只有具备合理的运动自由度和方式、高效稳定的控制系统以及安全可靠的保护措施,才能有效提高生产效率和产品质量,满足企业的生产需求。
自动上下料机械手设计
自动上下料机械手的设计摘要随着机电一体化技术和计算机技术的应用,机械手的研究和开发水平获得了迅猛的发展并涉及到人类社会生产及生活的各个领域,特别是工业机械手在生产加工中的应用。
机械手是近代自动控制领域中出现的一种新型技术装备,它能模仿人体上肢某些动作,在生产中代替人搬运物体或操持工具进行动作,已成为现代机械制造系统中的一个重要组成部分。
本次设计主要设计自动上下料的机械手,该系统采用液压驱动,传动平稳,且易于控制,控制系统采用一般PLC所具有的位移寄存器和位移指令来编程。
关键词:机械手,液压驱动,控制系统目录1绪论 (1)2 工业机械手的设计方案 (2)2.1 工业机械手的组成 (2)2.2 上下料机械手的工作原理 (3)2.3 规格参数的选择 (3)2.4 设计路线与方案 (4)2.4.1 机械手的总体设计方案 (4)2.4.2 设计步骤 (4)2.4.3 研究方法和措施 (4)3 机械手各部分的计算与分析 (5)3.1 手部计算与分析 (5)3.1.1 滑槽杠杆式手部设计的基本要求 (5)3.1.2 手部的计算和分析 (5)3.2 腕部计算与分析 (12)3.2.1 腕部设计的基本要求 (12)3.2.2 腕部回转力矩的计算 (13)3.2.3 腕部摆动油缸设计 (16)3.2.4 选键并校核强度 (18)3.3 臂部计算与分析 (18)3.3.1 臂部设计的基本要求 (18)3.3.2 手臂的设计计算 (20)3.4 机身计算与分析 (28)4 液压系统设计 (29)4.1 液压系统总体设计 (29)4.2 液压元件的选择 (29)4.2.1 液压缸 (29)4.2.2 液压泵的选取要求及其具体选取 (31)4.2.3 选择液压控制阀的原则 (33)4.2.4 选择液压辅助元件的要求 (33)5 液压元件的保养与维修 (37)5.1 液压元件的安装 (37)5.2 液压系统的一般使用与维护 (37)5.3 一般技术安全事项 (37)6 结论 (39)参考文献 (40)致谢 (41)附录 (42)1绪论工业机械手是人类创造的一种机器,更是人类创造的一项伟大奇迹,其研究、开发和设计是从二十世纪中叶开始的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
编号:SM-ZD-30903
通用上下料气动机械手结
构设计
Organize enterprise safety management planning, guidance, inspection and decision-making, ensure the safety status, and unify the overall plan objectives
编制:____________________
审核:____________________
时间:____________________
本文档下载后可任意修改
通用上下料气动机械手结构设计
简介:该安全管理资料适用于安全管理工作中组织实施企业安全管理规划、指导、检查和决策等事项,保证生产中的人、物、环境因素处于最佳安全状态,从而使整体计划目标统一,行动协调,过程有条不紊。
文档可直接下载或修改,使用时请详细阅读内容。
气动机械手具有结构简单、重量轻、动作迅速、可靠、节能、不污染环境、可实现无级调速、易实现过载保护等优点,应用特点广泛。
论文介绍了气动机械手的原理,对机械手的主要部件和设计要求做了相关的阐述,另外对机械手回转臂的结构帮了优化措施。
气动机械手能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。
气动机械手具有结构简单、重量轻、动作迅速、可靠、节能、不污染环境、可实现无级调速、易实现过载保护等优点,特别适用于汽车制造业、食品和药品包装行业、化工行业、精密仪器制造业和军事工业等。
在现代工业技术应用的气动机械手能够实现4个自由度的运动,其各自的自由度的驱动全部由气动肌肉来实现。
最前端的气爪抓取物品,通过气动肌肉的驱动实现各自关节的转动,使物品在空间上运动,根据合理的控制,最终实现机
械手的动作要求。
气动机械手回转臂的设计主要是选择合适的控制阀,设计合理的气动控制回路,通过控制和调节各个气缸压缩空气的压力、流量和方向来使气动执行机构获得必要的力、动作速度和改变运动方向,并按规定的程序工作。
气动机械手的原理
气压传动机械手是以压缩空气的压力来驱动执行机构运动的机械手。
它巧妙地应用力的平衡原理,使操作者对重物进行相应的位移,就可在空间内平衡移动定位负荷。
重物在提升或下降时形成浮动状态,靠气路实现微重力的物料位移,操作力受工件重量影响。
无需熟练的点动操作,操作者用手推拉重物,就可以把重物正确地放到空间中的任何位置,或者通过操作台控制工件的位移可完成以下动作:送料、预夹紧、手臂上升、手臂旋转、小臂伸长、手腕旋转。
气动机械手的主要部件和设计要求
根据模块化设计思想,机械手的各模块化机构分别为:立柱、手臂、小臂、手腕和手爪几个部分。
论文选择圆柱坐标式机械手,木设计的机械手具有3个自由度:手臂伸缩;机身回转;机身升降。
木设计的机械手主要由3个大部件和3
个气缸组成:手部,采用一个气爪,通过机构运动实现手爪的运动。
臂部,采用直线缸来实现手臂的伸缩。
机身,采用一个直线缸和一个回转缸来实现手臂升降和回转。
机械手的手部是机械手上承担抓取工件的机构,由于被抓取物件(炮弹)的形状近似于圆台,所以,其手爪采用特殊的V字型结构,即手爪的内表而设计成与圆台斜度相同的斜而,即保证了抓取的稳定又不会因“线接触”而影响炮弹的表而质量。
通过对平衡气缸内空气压力快速精确的调节,实现对某一重量范围内工件的实时平衡状态。
机械手可选择定制功能:平衡系统;垂直提升;负载平衡。
设备回转关节设置刹车系统,可在任意所需要的位置刹车,使机械手可以长期或定期保持需要的状态。
翻转90度、翻转180度和翻转任意角度(MAX270°);断气保护:设备被意外断气时,设备上的储气罐装置可保证工人正常完成一个循环工作,然后进入刹车状态指不功能:负载指示、到位指示。
误操作保护功能:工件在悬空时不可被释放。
人性化操作手柄:控制按钮和人性化防滑手柄集成一体,让操作人更便捷操纵机体。
工件表面保护:夹具接触工件部位装置保护物件,保证工件
表而不会被刮伤。
高效率工作:夹具设置抓取导向,让工件的拾取更高效。
控制系统可根据动作的要求,设计采用数字顺序控制。
它首先要编制程序加以存储,然后再根据规定的程序,控制机械手进行工作程序的存储方式有分离存储和集中存储两种。
分离存储是将各种控制因素的信息分别存储于两种以上的存储装置中,如顺序信息存储于插销板、凸轮转鼓、穿孔带内;位置信息存储于时间继电器、定速回转鼓等;集中存储是将各种控制因素的信息全部存储于一种存储装置内,如磁带、磁鼓等这种方式使用于顺序、位置、时间、速度等必须同时控制的场合,即连续控制的情况下使用。
机械手回转臂的结构优化措施
为防止手臂沿伸缩方向轴线转动、加大承载能力,以及提高运动精度,必须设有导向装置。
伸缩手臂的导向装置需根据伸缩手臂的安装形式、结构及负荷等条件来确定。
用的有单导向杆和双导向杆。
在气动伺服系统中要实现高精度定位比较困难,将旋转气缸安装在底板上,实现机械手的回转运动,使机械手向左或向右摆动。
机械手末端执行器的水平
伸缩运动和竖直升降运动各由一个气缸控制,即以最简单的形式,在完全伸出和回缩位置之间进行切换。
具体优化措施:第一,由于最大应力出现在齿轮的齿根处,所以,为了减小应力给齿轮寿命带来的影响,应采用热处理方法增强齿根强度。
第二,由于最大变形出现在手爪受压的地方,长期使用定会加剧磨损,从而间接影响在检测平台上的位置。
因此,对于下半部分手爪结构进行热处理,以增强其耐磨性和强度。
这里填写您的企业名字
Name of an enterprise。