5极点配置与观测器的设计
利用MATLAB 实现极点配置、设计状态观测器(现代控制)
实 验 报 告实验名称 利用MATLAB 实现极点配置、设计状态观测器系 专业 自动化 班姓名 学号 授课老师 预定时间 实验时间实验台号 一、目的要求1、掌握状态反馈和输出反馈的概念及性质。
2、掌握利用状态反馈进行极点配置的方法。
学会用MATLAB 求解状态反馈矩阵。
3、掌握状态观测器的设计方法。
学会用MATLAB 设计状态观测器。
4、熟悉分离定理,学会设计带有状态观测器的状态反馈系统。
原理简述状态反馈和输出反馈设线性定常系统的状态空间表达式为Cx y Bu Ax x =+=&如果采用状态反馈控制规律u= r-Kx ,其中 r 是参考输入,则状态反馈闭环系统的传递函数为: B BK A sI C G k 1)]([---=2、极点配置如果 SISO 线性定常系统完全能控,则可通过适当的状态反馈, 将闭环系统极点配置到任意期望的位置。
MATLAB 提供的函数acker( )是用Ackermann 公式求解状态反馈阵K 。
该函数的调用格式为K=acker(A,B,P)其中A 和B 分别为系统矩阵和输入矩阵。
P 是期望极点构成的向量。
MATLAB 提供的函数place( )也可求出状态反馈阵K 。
该函数的调用格式为K=place(A,B,P)函数place( )还适用于多变量系统极点配置,但不适用含有多重期望极点的问题。
函数acker( )不适用于多变量系统极点配置问题,但适用于含有多重期望极点问题。
三、仪器设备PC 计算机,MATLAB 软件内容步骤、数据处理题5-1 某系统状态方程如下[]010100134326100x x u y x⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥----⎣⎦⎣⎦=& [](s+ (s^2 + +------------------------------------(s+30) (s+ (s^2 + +>> A=[-10 -35 -50 -24;1 0 0 0;0 1 0 0;0 0 1 0];B=[1;0;0;0];C=[1 7 24 24];D=0;G=ss(A,B,C,D);p=[-30 +4i ];k=place(A,B,p);A1=A-B*k;G1=ss(A1,B,C,D);t=0::20;u=ones(size(t));y2=lsim(G1,u,t);y1=lsim(G,u,t);plot(t,y1,':',t,y2,'-')蓝色为配置前,绿色为配置后题5-3 某系统状态空间描述如下[]010100134326100x x u y x⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥----⎣⎦⎣⎦=& 设计全维状态观测器,要求状态观测器的极点为[]123---。
05第五章 极点配置与观测器设计
A11 B1K c
A22
开环不能控极点无法改变
结论:
1. 状态反馈只改变能控性极点; 2. 只有开环系统完全能控时,所有的极点都可改 变,即开环系统完全能控时,可任意配置极点; 3. 不能控极点不稳定时(不能控极点有实部≥0), 无论如何选择K,闭环系统都不 s 2s 1
k1 2 2 k1 k 2 1 1
k1 4 k 2 4
k 4 4
(5) 代入 k 4 - 4 1 s 1 -1 1 2 A bk , sI- A bk 4 s 3 s 1 4 3
sI A bk s n d1s n1 d 2 s n2 d n1s d n
这里A, b已知,期望极点1 , 2 n 给定
即:d1 , d 2 ,, d n已知
由上式可得出 k 值
例:
1 1 0 x x 1 u 0 1
例:
1 G( s) 2 s 3s 1
超调量: p % 5% 要求闭环满足: 峰值时间:t p 0.53
阻尼振荡频率: d 10
解: (1) 状态空间模型(实现)
0 x - 1
1 0 x 1 u 3
(2) 根据时域指标求取期望极点
第五章 极点配置与观测器设计
5.1 概述
5.2 单输入系统的极点配置 5.3 多输入系统的极点配置
5.4 观测器及其设计方法
5.5 用状态观测器的反馈系统
第一节
一、问题的提出
• 系统的描述:
概述
模型结构,如第一章状态方程内容
• 系统的分析:
5第五节极点配置
K = [− 9.4 − 79.1 − 170.8]
以上述状态阵K反馈后的状态方程为:
1 0 0 0 ɺ X = ( A + B K ) X + Bv = 0 0 1 X + 0 v − 172.8 − 82.1 − 14.4 1 y 输出方程为: = x1 = [1 0 0]X
Saturday, June 25,1]一个三阶系统的微分方程为:ɺ(t ) + 5 ɺɺ(t ) + 3 y (t ) + 2 y (t ) = u (t ) y 希望该系统有小的超调量,调整时间小于1秒。试确定状态反馈 阵K,以满足上述要求。
选择希望的特征方程为: * (λ ) = (λ2 + 2ζλ + ω n 2 )(λ + ζω n ) = 0 f 因为要求小的超调量,所以可以取ζ = 0.8,那么调整时间为:
Saturday, June 25, 2011
11
Saturday, June 25, 2011
9
u K 状态反馈阵K是: = [k1 k 2 k3 ] 。取控制量为: = K X ɺ 则:X = A X + B K X = ( A + B K ) X 1 0 0 0 1 其中:A + B K = 0 − 2 + k1 − 3 + k 2 − 5 + k3 特征方程为: f (λ ) = det[λI − ( A + B K )] = λ3 + (5 − k3 )λ2 + (3 − k 2 )λ + (2 − k1 )
u
B
图a
ɺ x
+
现代控制理论课件PPT极点的配置和观测器的设置

(s *1)(s *2 )
(s
* n
)
sn
a1*s n1
an1*s an*
0
通过比较系数,可知
a1
~k~n
a2 kn1
a1* a2
*
an
~ k1
an*
西华大学电气与电子信息学院
由此即有
k~2k~1aann1**
an an1
~ kn
a1*
a1
又因为
u v Kx v KP1x% v K%x%
要求用状态反馈来镇定系统。
解:系统不稳定。同时系统为不能控的。不能控子系统 特征值为-5,符合可镇定条件。故原系统可用状态反馈 实现镇定,镇定后极点设为 s1,2 2 j2
能控子系统方程为
x&C
AC xC
bCu
1 0
0 1 2 xC 1 u
引入状态反馈 u V KC xC ,设 KC [k1 k2 ]
西华大学电气与电子信息学院
5.2 系统的极点配置
所谓极点配置,就是通过选择适当的反馈形式和反馈矩阵, 使系统的闭环极点恰好配置在所希望的位置上,以获得所希 望的动态性能。
5.2.1 能控系统的极点配置 定理 5-2 给定系统
x Ax Bu :
y Cx Du
通过状态反馈 u v kx 任意配置极点的充
要条件 完全能控。
西华大学电气与电子信息学院
证: 只就单输入系统的情况证明本定理
充分性:因为给定系统 能控,故通过等价变换
~x Px 必能将它变为能控标准形
%:
x&% A%x% b%u y c%x% d%u
这里,P 为非奇异的实常量等价变换矩阵,且有
利用matlab实现极点配置、设计状态观测器(现代控制)
实 验 报 告实验名称 利用MATLAB 实现极点配置、设计状态观测器系 专业 自动化 班 姓名 学号 授课老师 预定时间实验时间实验台号一、目的要求1、掌握状态反馈和输出反馈的概念及性质。
2、掌握利用状态反馈进行极点配置的方法。
学会用MATLAB 求解状态反馈矩阵。
3、掌握状态观测器的设计方法。
学会用MATLAB 设计状态观测器。
4、熟悉分离定理,学会设计带有状态观测器的状态反馈系统。
二、原理简述1、状态反馈和输出反馈设线性定常系统的状态空间表达式为Cxy Bu Ax x =+=如果采用状态反馈控制规律u= r-Kx ,其中 r 是参考输入,则状态反馈闭环系统的传递函数为:B BK A sIC G k 1)]([---=2、极点配置如果 SISO 线性定常系统完全能控,则可通过适当的状态反馈, 将闭环系统极点配置到任意期望的位置。
MATLAB 提供的函数acker( )是用Ackermann 公式求解状态反馈阵K 。
该函数的调用格 式为K=acker(A,B,P)其中A 和B 分别为系统矩阵和输入矩阵。
P 是期望极点构成的向量。
MATLAB 提供的函数place( )也可求出状态反馈阵K 。
该函数的调用格式为 K=place(A,B,P)函数place( )还适用于多变量系统极点配置,但不适用含有多重期望极点的问题。
函数acker( )不适用于多变量系统极点配置问题,但适用于含有多重期望极点问题。
三、仪器设备PC 计算机,MATLAB 软件⎣[y1=lsim(G,u,t); plot(t,y1,':',t,y2,'-')蓝色为配置前,绿色为配置后题5-3 某系统状态空间描述如下[]010100134326100x x u y x⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥----⎣⎦⎣⎦= 设计全维状态观测器,要求状态观测器的极点为[]123---。
程序>> A=[0 1 0;0 0 1;-4 -3 -2];B=[1;3;-6]'; C=[1 0 0]; D=0;p=[-1 -2 -3]; L=(acker(A',C',p))' 结果:L = 40 -10。
利用MATLAB 实现极点配置、设计状态观测器(现代控制)
订 线实 验 报 告实验名称 利用MATLAB 实现极点配置、设计状态观测器系 专业 自动化 班 姓名 学号 授课老师 预定时间实验时间实验台号一、目的要求1、掌握状态反馈和输出反馈的概念及性质。
2、掌握利用状态反馈进行极点配置的方法。
学会用MATLAB 求解状态反馈矩阵。
3、掌握状态观测器的设计方法。
学会用MATLAB 设计状态观测器。
4、熟悉分离定理,学会设计带有状态观测器的状态反馈系统。
二、原理简述1、状态反馈和输出反馈设线性定常系统的状态空间表达式为Cxy Bu Ax x=+=如果采用状态反馈控制规律u= r-Kx ,其中 r 是参考输入,则状态反馈闭环系统的传递函数为:B BK A sIC G k 1)]([---=2、极点配置如果 SISO 线性定常系统完全能控,则可通过适当的状态反馈, 将闭环系统极点配置到任意期望的位置。
MATLAB 提供的函数acker( )是用Ackermann 公式求解状态反馈阵K 。
该函数的调用格 式为K=acker(A,B,P)其中A 和B 分别为系统矩阵和输入矩阵。
P 是期望极点构成的向量。
MATLAB 提供的函数place( )也可求出状态反馈阵K 。
该函数的调用格式为 K=place(A,B,P)函数place( )还适用于多变量系统极点配置,但不适用含有多重期望极点的问题。
函数acker( )不适用于多变量系统极点配置问题,但适用于含有多重期望极点问题。
三、仪器设备PC 计算机,MATLAB 软件[0410x y ⎢=⎢⎢--⎣=理想闭环系统的极点为(1)采用直接计算法进行闭环系统极点配置;(2)采用Ackermann订 线y1=lsim(G,u,t); plot(t,y1,':',t,y2,'-')蓝色为配置前,绿色为配置后题5-3 某系统状态空间描述如下[]010100134326100x x u y x⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥----⎣⎦⎣⎦= 设计全维状态观测器,要求状态观测器的极点为[]123---。
利用MATLAB 实现极点配置、设计状态观测器(现代控制)要点

D=0;
p=[-30 -1.2 -2.4+4i -2.4-4i];
k=place(A,B,p);
A1=A-B*k;
sys=ss(A1,B,C,D);
G1=zpk(sys)
结果:Zero/pole/gain:
(s+1.539) (s^2 + 5.461s + 15.6)
------------------------------------
k=place(A,B,p);
A1=A-B*k;
sys=ss(A1,B,C,D);
G1=zpk(sys)
结果:
Zero/pole/gain:
(s+4.303) (s+0.6972)
--------------------
(s+3) (s+2) (s+1)
则其极点为-1,-2,-3
题5-2某控制系统的状态方程描述如下:
sys=ss(A1,B,C,D);
G1=zpk(sys)
结果:Zero/pole/gain:
(s^2 + 5s + 15)
-------------------------
(s+1) (s+1.999) (s+3.001)
则其极点为பைடு நூலகம்1 ,-2 ,-3
(2)
程序:
>> A=[0 1 0;0 0 1;-4 -3 -2];
实验报告
实验名称利用MATLAB实现极点配置、设计状态观测器
系
专业
自动化
班
姓名
学号
授课老师
预定时间
实验五 状态观测器的设计
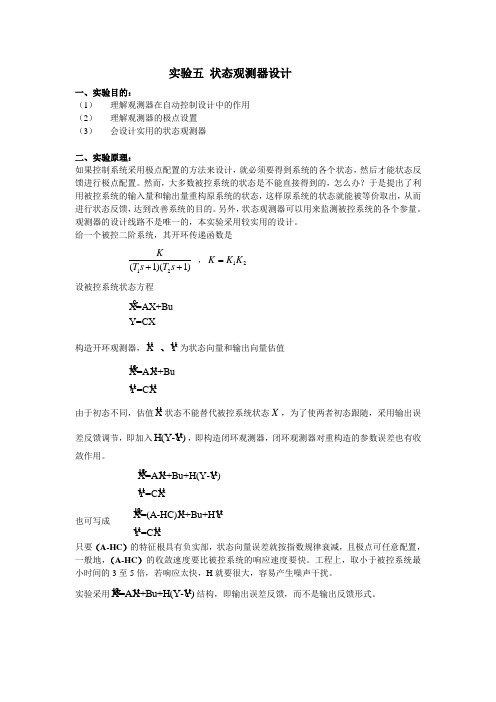
实验五 状态观测器设计一、实验目的:(1) 理解观测器在自动控制设计中的作用(2) 理解观测器的极点设置(3) 会设计实用的状态观测器二、实验原理:如果控制系统采用极点配置的方法来设计,就必须要得到系统的各个状态,然后才能状态反馈进行极点配置。
然而,大多数被控系统的状态是不能直接得到的,怎么办?于是提出了利用被控系统的输入量和输出量重构原系统的状态,这样原系统的状态就能被等价取出,从而进行状态反馈,达到改善系统的目的。
另外,状态观测器可以用来监测被控系统的各个参量。
观测器的设计线路不是唯一的,本实验采用较实用的设计。
给一个被控二阶系统,其开环传递函数是12(1)(1)K T s T s ++ ,12 K K K = 设被控系统状态方程X=AX+BuY=CX构造开环观测器, X、 Y 为状态向量和输出向量估值 X=AX+Bu Y=CX由于初态不同,估值 X状态不能替代被控系统状态X ,为了使两者初态跟随,采用输出误差反馈调节,即加入 H(Y-Y),即构造闭环观测器,闭环观测器对重构造的参数误差也有收敛作用。
X=AX+Bu+H(Y-Y)Y=CX也可写成 X=(A-HC)X+Bu+HY Y=CX只要(A-HC )的特征根具有负实部,状态向量误差就按指数规律衰减,且极点可任意配置,一般地,(A-HC )的收敛速度要比被控系统的响应速度要快。
工程上,取小于被控系统最小时间的3至5倍,若响应太快,H 就要很大,容易产生噪声干扰。
实验采用X=AX+Bu+H(Y-Y)结构,即输出误差反馈,而不是输出反馈形式。
由图可以推导: 11112222[()]1[()]1K x u Y y g T s K x u Y y g T s =+-+=+-+所以: 111111112222122121 ()1 ()K g K x x u Y y T T T K g K x x x Y y T T T =-++-=-+- 比较: X=Ax+Bu+H(Y-Y)Y=Cx可以得到:[]1111111222221210 , B= , C=01,10g K K T T g T A H g K g K T T T ⎡⎤⎡⎤-⎡⎤⎢⎥⎢⎥⎡⎤⎢⎥⎢⎥⎢⎥==≠⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦-⎢⎥⎣⎦⎢⎥⎢⎥⎣⎦⎣⎦选择观测器极点为1λ,2λ即有:12()()s s λλ++故:特征式 d e t ()S I A H C-+=12()()s s λλ++ 取:1212min 3520,5,2,0.5,0.2K K T T t λ-======,求解12g g ⎡⎤⎢⎥⎣⎦三、实验设备:THBDC-1实验平台THBDC-1虚拟示波器Matlab/Simulink 软件四、实验步骤:按要求设计状态观测器(一)在Matlab环境下实现对象的实时控制1、将ZhuangTai_model.mdl复制到E:\MA TLAB6p5\work子目录下,运行matlab,打开ZhuangTai_model.mdl注:‘实际对象’模块对应外部的实际被控对象,在simulink下它代表计算机与外部的接口:●DA1对应实验面板上的DA1,代表对象输出,输出通过数据卡传送给计算机;●AD1对应实验面板上的AD1,代表控制信号,计算机通过数据卡将控制信号送给实际对象;2、如图,在Simulink环境下搭建带状态观测器的系统实时控制方框图3、如图正确接线,并判断每一模块都是正常的,包括接好测试仪器、设置参数、初始化各个设备和模块;接成开环观测器,双击误差开关,使开关接地。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
x AxBu :
y CxDu
通过状态反馈 uvkx任意配置极点的充
要条件 完全能控。
2020/4/5
证: 只就单输入系统的情况证明本定理
充分性:因为给定系统 能控,故通过等价变换
~xPx必能将它变为能控标准形
%: x&% A%x% b%u
,
y c%x% d%u
:
x& 13
2 1
x10u
y [1 2]x 完全能控能观,引入反馈 u[3 1]xV
则闭环系统 的K 状态空间表达式为
K
:
x&
1 0
2 0
x10v
y [1 2]x
不难判断,系统 K 仍然是能控的,但已不再
能观测。
2020/4/5
5.2 系统的极点配置
所谓极点配置,就是通过选择适当的反馈形式和反馈矩阵, 使系统的闭环极点恰好配置在所希望的位置上,以获得所希 望的动态性能。
第5章 极点配置与观测器的设计
舒欣梅 西华大学电气信息学院
2020/4/5
第5章 极点配置与观测器的设计
5.1 反馈控制结构 5.2 系统的极点配置 5.3 状态解耦 5.4 观测器及其设计方法 5.5 带状态观测器的反馈系统 5.6 MATLAB在控制系统综合中的应用
2020/4/5
综合与设计问题,即在已知系统结构和参数(被控系统数学模型) 的基础上,寻求控制规律,以使系统具有某种期望的性能。
j
3
解:因为
1 0 0
ranbk Ab A2bran0k 1 13
0 0 1
系统是状态完全能控,通过状态反馈控制律 能
任意 配置闭环特征值。
2020/4/5
1) 由
s 0 0
det(sIA)det1 s1 0 s32s2s
0 1 s1
得 a12,a21,a30.
2) 由 (s1 * )(s2 * )(s3 * ) (s 2 )(s 1 j3 )(s 1 j3 )
一般说来,这种控制规律常取反馈形式。
经典控制理论用调整开环增益及引入串联和反馈校正装置来配置 闭环极点,以改善系统性能;而在状态空间的分析综合中,除了 利用输出反馈以外,更主要是利用状态反馈配置极点,它能提供 更多的校正信息。
由于状态反馈提取的状态变量通常不是在物理上都可测量,需要 用可测量的输入输出重新构造状态观测器得到状态估计值。
这里,P为非奇异的实常量等价变换矩阵,且有
0 1
A~PAP1
1
an an1 a1
2020/4/5
0
b~ Pb
0
1
c ~ c 1 P n n 11 d~d
引入状态反馈
u vK%x% K %k% 1 k% 2 L k% n 则闭环系统 % K 的状态空间表达式为
% K
:
x&% ( A% b%K%)x% b%v y (c% d%K%)x% d%v
证明 对任意的K阵,均有
IA B K B IAB K I 0 I
上式中等式右边的矩阵
I
K
0
I
,对任意常值都是非奇异的。
因此对任意的 和K,均有
r a n k I A B K B r a n k I A B
说明,状态反馈不改变原系统的能控性
2020/4/5
例 系统
可求得期望的闭环特征方程
( s * 1 ) s ( * 2 ) ( s * n ) s n a 1 * s n 1 a n 1 * s a n * 0
通过比较系数,可知
a
a
2
1
k~ ~ kn
n
1
a1 a
* 2
*
an
~ k1
a n*
2020/4/5
由此即有
将 K 变换为 KKP1
直接求K阵方法
根据要求极点,写出希望闭环特征多项式
令
n
sIAB Kf*s s*
求解
i 1
2020/4/5
例 给定系统的状态空间表达式为
0 0 0 1 x 1 1 0 x 0u
0 1 1 0
y011x
求状态反馈增益阵 K ,使反馈后闭环特征值为
1* 2
* 2,3
1
1 00 00 1 100 100
5)
1 2 11 0 0 1
PQ1 1 1 0 0 1 1
1 0 0 1 2 1
6)
0 0 1
kk% P8 7 20 1 12 3 3
状态反馈与状态观测器的设计便构成了现代控制系统综合设计的 主要内容。
2020/4/5
5.1 反馈系统
x& Ax Bu y Cx Du
在系统中引入反馈控制律
u=V-Kx
则闭环系统 的结构如图 5-1 所示。
2020/4/5
状态空间表达式为:
x & A x B u A x B (V K x ) (A B K )x B V
s 3 4 s 2 8 s 8
得 a1 *4,a2 8,a3 8.
3) k a 3 a 3 ,a 2 a 2 ,a 1 a 1 8 ,7 ,2
2020/4/5
4)
a 2 a 1 1 10 0121 121 Q bA bA 2 b a 1 10 01 1 210 110
2020/4/5
其中,显然有
0
1
(A%b% K%)
O
an
k% 1
an1k% 2
L
1 a1k% n
系统 % K 的闭环特征方程为
s n ( a 1 k ~ n ) s n 1 ( a 2 k ~ n 1 ) s n 2 ( a n k ~ 1 ) 0
2020/4/5
同时,由指定的任意 n个期望闭环极点*1,*2,,*n
k~
~ k1 2
a
an*
* n 1
an a n1
~ kn
a1*
a1
又因为
u v K x v K P 1 x % v K % x %
所以
K K%P
2020/4/5
K阵的求法
根据能控标准形求解
求线性变换P阵,将原系统变换为能控标准 形。然后根据要求的极点配置,计算状态 反馈阵 K a n a n ,a n 1 a n 1 ,L ,a 1 a 1
y C x D u C x D (V K x ) C D K x D V
2020/4/5
5.1.2 输出反馈
当 D 0 时,输出反馈系统动态方程为
x&ABHCxBV
yCx
2020/4/5
5.1.3 状态反馈系统的性质
定理5-1 对于任何常值反馈阵K,状态反馈系统 能控的充分必要条件是原系统能控。