实验 6 极点配置与全维状态观测器的设计(优.选)
实验六状态反馈与状态观测器
状态反馈与状态观测器——38030229高乙超一.实验目的:1.1掌握用状态反馈进行极点配置的方法。
1.2了解带有状态观测器的状态反馈系统。
二.实验原理:2.1状态反馈:对于一个可控的线性时不变系统E状态方程:ẋ=Ax+buy=cx可以通过状态反馈:u=r−kx任意配置极点,得到带有状态反馈的可控系统E’:ẋ=(A−bk)x+bry=cx系统的传递函数为:G(s)=c(sI−A+bk)−1b对于E’闭环矩阵A-bk的特征值可以由k阵配置到复平面的任意位置。
其充要条件是原系统可控。
2.2状态观测器:状态反馈可以实现任意配置极点,但是需要的到系统的状态。
事实上,系统的状态往往是不能测量的,因此希望用计算机构成一个与实际系统[A,b,c]具有同样动态方程的模拟系统,用模拟系统的状态x̂作为系统状态向量x的估计值。
观测器的目的就是为了提供一个估计值x̂使得在t→∞时,x̂→x。
事实上,对于一个可观的系统[A,c]有对偶原理和特征值可分配原理我们可以对于一个可控系统[A T,c T]通过H T阵使得A T−c T H T特征值任意配置。
如果系统完全客观,我们就总能找到一个H阵使得观测器的跟踪误差以期望的速度趋于零。
跟踪误差:x̃=ẋ−x̂=A(x−x̂)−Hc(x−x̂)=(A−Hc)x̃如果系统是可控同时可观的那么由分离原理我们可以按照极点配置需要的反馈阵k,按照观测器的动态要求选择H,而互不影响。
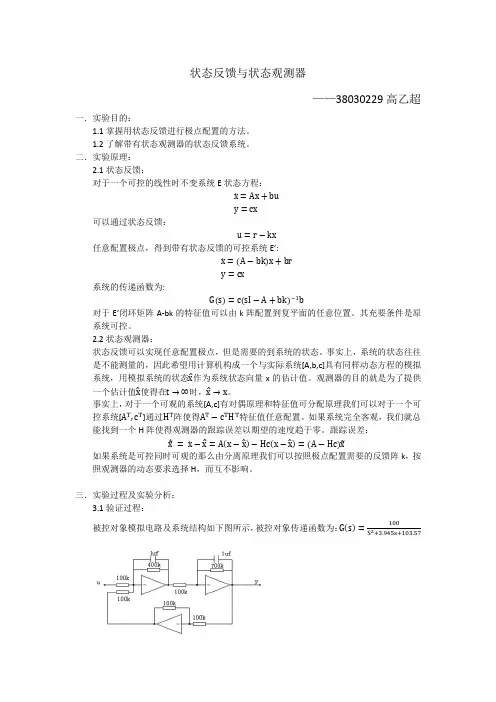
三.实验过程及实验分析:3.1验证过程:被控对象模拟电路及系统结构如下图所示,被控对象传递函数为:G(s)=100S2+3.945s+103.57系统响应曲线如下:未加状态观测器: 系统仿真(L),模拟输出(R)加状态观测器: 系统仿真(L),模拟输出(R)3.2对如下图控制系统设计状态反馈阵K,使动态性能指标满足超调量σ%≤5%,峰值时间tp≤5.0s。
设计反馈器电路图如下:系统响应曲线如下:四.实验总结:理论上,对于一个可观可控的系统我们可以通过状态反馈和状态观测器满足我们对于系统性能的需求,实际上状态观测器提供的估计状态是存在一定误差的,为满足实时和准确性的需要,合理的设计H阵是有必要的。
现代控制理论课件PPT极点的配置和观测器的设置
(s *1)(s *2 )
(s
* n
)
sn
a1*s n1
an1*s an*
0
通过比较系数,可知
a1
~k~n
a2 kn1
a1* a2
*
an
~ k1
an*
西华大学电气与电子信息学院
由此即有
k~2k~1aann1**
an an1
~ kn
a1*
a1
又因为
u v Kx v KP1x% v K%x%
要求用状态反馈来镇定系统。
解:系统不稳定。同时系统为不能控的。不能控子系统 特征值为-5,符合可镇定条件。故原系统可用状态反馈 实现镇定,镇定后极点设为 s1,2 2 j2
能控子系统方程为
x&C
AC xC
bCu
1 0
0 1 2 xC 1 u
引入状态反馈 u V KC xC ,设 KC [k1 k2 ]
西华大学电气与电子信息学院
5.2 系统的极点配置
所谓极点配置,就是通过选择适当的反馈形式和反馈矩阵, 使系统的闭环极点恰好配置在所希望的位置上,以获得所希 望的动态性能。
5.2.1 能控系统的极点配置 定理 5-2 给定系统
x Ax Bu :
y Cx Du
通过状态反馈 u v kx 任意配置极点的充
要条件 完全能控。
西华大学电气与电子信息学院
证: 只就单输入系统的情况证明本定理
充分性:因为给定系统 能控,故通过等价变换
~x Px 必能将它变为能控标准形
%:
x&% A%x% b%u y c%x% d%u
这里,P 为非奇异的实常量等价变换矩阵,且有
利用matlab实现极点配置、设计状态观测器(现代控制)
实 验 报 告实验名称 利用MATLAB 实现极点配置、设计状态观测器系 专业 自动化 班 姓名 学号 授课老师 预定时间实验时间实验台号一、目的要求1、掌握状态反馈和输出反馈的概念及性质。
2、掌握利用状态反馈进行极点配置的方法。
学会用MATLAB 求解状态反馈矩阵。
3、掌握状态观测器的设计方法。
学会用MATLAB 设计状态观测器。
4、熟悉分离定理,学会设计带有状态观测器的状态反馈系统。
二、原理简述1、状态反馈和输出反馈设线性定常系统的状态空间表达式为Cxy Bu Ax x =+=如果采用状态反馈控制规律u= r-Kx ,其中 r 是参考输入,则状态反馈闭环系统的传递函数为:B BK A sIC G k 1)]([---=2、极点配置如果 SISO 线性定常系统完全能控,则可通过适当的状态反馈, 将闭环系统极点配置到任意期望的位置。
MATLAB 提供的函数acker( )是用Ackermann 公式求解状态反馈阵K 。
该函数的调用格 式为K=acker(A,B,P)其中A 和B 分别为系统矩阵和输入矩阵。
P 是期望极点构成的向量。
MATLAB 提供的函数place( )也可求出状态反馈阵K 。
该函数的调用格式为 K=place(A,B,P)函数place( )还适用于多变量系统极点配置,但不适用含有多重期望极点的问题。
函数acker( )不适用于多变量系统极点配置问题,但适用于含有多重期望极点问题。
三、仪器设备PC 计算机,MATLAB 软件⎣[y1=lsim(G,u,t); plot(t,y1,':',t,y2,'-')蓝色为配置前,绿色为配置后题5-3 某系统状态空间描述如下[]010100134326100x x u y x⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥----⎣⎦⎣⎦= 设计全维状态观测器,要求状态观测器的极点为[]123---。
程序>> A=[0 1 0;0 0 1;-4 -3 -2];B=[1;3;-6]'; C=[1 0 0]; D=0;p=[-1 -2 -3]; L=(acker(A',C',p))' 结果:L = 40 -10。
利用MATLAB 实现极点配置、设计状态观测器(现代控制)
订 线实 验 报 告实验名称 利用MATLAB 实现极点配置、设计状态观测器系 专业 自动化 班 姓名 学号 授课老师 预定时间实验时间实验台号一、目的要求1、掌握状态反馈和输出反馈的概念及性质。
2、掌握利用状态反馈进行极点配置的方法。
学会用MATLAB 求解状态反馈矩阵。
3、掌握状态观测器的设计方法。
学会用MATLAB 设计状态观测器。
4、熟悉分离定理,学会设计带有状态观测器的状态反馈系统。
二、原理简述1、状态反馈和输出反馈设线性定常系统的状态空间表达式为Cxy Bu Ax x=+=如果采用状态反馈控制规律u= r-Kx ,其中 r 是参考输入,则状态反馈闭环系统的传递函数为:B BK A sIC G k 1)]([---=2、极点配置如果 SISO 线性定常系统完全能控,则可通过适当的状态反馈, 将闭环系统极点配置到任意期望的位置。
MATLAB 提供的函数acker( )是用Ackermann 公式求解状态反馈阵K 。
该函数的调用格 式为K=acker(A,B,P)其中A 和B 分别为系统矩阵和输入矩阵。
P 是期望极点构成的向量。
MATLAB 提供的函数place( )也可求出状态反馈阵K 。
该函数的调用格式为 K=place(A,B,P)函数place( )还适用于多变量系统极点配置,但不适用含有多重期望极点的问题。
函数acker( )不适用于多变量系统极点配置问题,但适用于含有多重期望极点问题。
三、仪器设备PC 计算机,MATLAB 软件[0410x y ⎢=⎢⎢--⎣=理想闭环系统的极点为(1)采用直接计算法进行闭环系统极点配置;(2)采用Ackermann订 线y1=lsim(G,u,t); plot(t,y1,':',t,y2,'-')蓝色为配置前,绿色为配置后题5-3 某系统状态空间描述如下[]010100134326100x x u y x⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥----⎣⎦⎣⎦= 设计全维状态观测器,要求状态观测器的极点为[]123---。
全维状态观测器的设计
实验报告课程践性系统理抡基碣实验日期2016年6月6日 专业册级学号同组人 实验名称全维狀盗现測器的投廿坪分 批阅敎斷签字一、实鲨目的1. 学习用状态观测器获取系统状态IS it li ft 方法,了解全细状态观测器的 根点对状态的估it 误差的靈响;2. 拿捋全维状态观測器的设it 方法;3. 拿捋带有狀态规測器的状态反饋系躱设廿方法。
二、实验容a ) 用状态反馈配置系説的用环根点:一2±丿・2朽,一5;b ) 设廿全细狀态规測器,规测器的极点为:一5±/2巧,一10;0研究规测器tUE 置对估计状态逼近被估it 值的影响; d )求系统的传递函数(带规测器及不帑观测器时);绘制系躱的输出阶跃响应曲线。
三. 实螫环境MATLAB6.5・01 o'oA =0 0 1,b = 0-6-1161c = p 0 0]开环系统x = Ax + bu y = ex0.实验眾理(或程序框图)及步驟利用状态反饋可以便闭环系就的根点配置在所希里的位置上,以条件是必须对全部状态变量邵能iSliH量,但在实际系统中,并不是所有狀盗变量那能测量的,这就给狀态反锁的实现it成了困难。
SUtl设法利用已*11的信息(输岀量y和输人量x),通过一个模塑車新构适系貌状态以对状态变量进fiIfiito该模塑就枕为狀态规測器。
若状态观测器的阶次与系貌的阶次是曲同的,这样的状态规汹器就祢力全维狀态观测器或全阶观測器。
设系説完全可观,剧可fiiia图4"所示的狀态规测器图4-1全维状态範測器为求岀状态焜测器的反備ke熾益,与板点配置类做,也可有两种方法:方法一:构造变换矩阵Q,便系统变成标旌能规里,然后根齬特征方程求HI ke;方法二:是可采用Ackermann公式:& =①(A)Q:[o 0・・・0 if, 其中0。
力可规性矩眸。
利用对偶原理,可便设廿冋题大为简化。
首先构造对偶系貌然后可由变换沫或Ackermann公式求岀様点配置的反馈k增益,逹也可由MATLAB的place和acker函数得到;晟后求出狀态规测器的反饋增益。
现代控制实验--状态反馈器和状态观测器的设计
现代控制实验--状态反馈器和状态观测器的设计-CAL-FENGHAI-(2020YEAR-YICAI)_JINGBIAN状态反馈器和状态观测器的设计一、实验设备PC 计算机,MATLAB 软件,控制理论实验台,示波器二、实验目的(1)学习闭环系统极点配置定理及算法,学习全维状态观测器设计法;(2)掌握用极点配置的方法(3)掌握状态观测器设计方法(4)学会使用MATLAB工具进行初步的控制系统设计三、实验原理及相关知识(1)设系统的模型如式所示若系统可控,则必可用状态反馈的方法进行极点配置来改变系统性能。
引入状态反馈后系统模型如下式所示:(2)所给系统可观,则系统存在状态观测器四、实验内容(1)某系统状态方程如下10100134326x x u •⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥----⎣⎦⎣⎦[]100y x =理想闭环系统的极点为[]123---.(1)采用 Ackermann 公式计算法进行闭环系统极点配置;代码:A=[0 1 0;0 0 1;-4 -3 -2];B=[1; 3; -6];P=[-1 -2 -3];K=acker(A,B,P)Ac=A-B*Keig(Ac)(2)采用调用 place 函数法进行闭环系统极点配置;代码:A=[0 1 0;0 0 1;-4 -3 -2];B=[1;3;-6];eig(A)'P=[-1 -2 -3];K=place(A,B,P)eig(A-B*K)'(3)设计全维状态观测器,要求状态观测器的极点为[]---123代码:a=[0 1 0;0 0 1;-4 -3 -2];b=[1;3;-6];c=[1 0 0];p=[-1 -2 -3];a1=a';b1=c';c1=b';K=acker(a1,b1,p);h=(K)'ahc=a-h*c(2)已知系统状态方程为:10100134326x x u •⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥----⎣⎦⎣⎦[]100y x =(1)求状态反馈增益阵K ,使反馈后闭环特征值为[-1 -2 -3];代码:A=[0 1 0;0 0 1;4 -3 -2];b=[1;3;-6];p=[-1 -2 -3];k=acker(A,b,p)A-b*keig(A-b*k)(2)检验引入状态反馈后的特征值与希望极点是否一致。
全维状态观测器的设计
卖验报告镌程 銭性*统理论基础 令敲可朗2016年g 刀互目 *业去飲 _______ 学号 _耐俎人 _________ 丈 检名 怂 全* 状 态 观 删 星 的 设计 评分 ______馳闻敎艸签丰 ___________一、卖軽可的1. 学习用状态观测森灰取糸统状态估计值的方出,了鮮全维状态观测森的 极点对状态的估计谖臭的彩响;2. 拿握全维状态观测森的设计方法;3. 拿提带有状态观测森的状态反馈糸统设计方出。
x = Ax + bu开环糸统彳,其中y = exa)用状态反馈配.更糸疣的诃环极点:一2土丿PJM —5 ;b) 设计全维状态观测爰.叽测乐的圾点为:一5±)2丿亍,一10; c) 研兗观测乐圾点住逍对仕计状态遍近彼仕计值的彩响;・01 0_OA =0 1 ,b =-6-11 61c = p 0 0]绘制糸统的输出阶跃响应曲线。
三.实脍环境MATLAB6.5宾唸々理图丿及歩螺利用状态及馈可以使诃环糸疣的圾盍配逍疫所希玺的住置上,其条件是必须对全部状态变量都能进行测量,仅A卖际糸统中.并不是所冇状态变量却能测量的,这就给状态反馈的卖现岌成了困难。
因此要设法利用己知的传息(綸出量y和綸入量x)>通过一个栈空重新构逡糸统状态以对状态变量进行仕计。
该楼型就称为状态观测森。
若状态观测森的阶次与务统的阶次是相同的,这擇的状态观测容就称为全维状态观测森戎全阶观测怎。
设糸疣兜全可观.則可构凌如图4・1所承的状态观測余国4-1 全维状态观測容为求出状态观測爰的反馈ke增益,与极点紀.1.类很.也可有而种方法:为比一:构逡雯换矩阵Q,使糸统支成标准能观淫.然后根据持征方程求岀匕;•资料. ^方出二:是可采用Ackermann 公 < : k c = [O 0…0 if,其中0。
为可观性矩阵。
利用对偶虑理,可使沒计问題大为简化。
管丸构凌对偶糸统'^=A T^+ C T Vhg然后可由变换法或Ackermann小式求出极点紀.1.的反馈k增益,这也可由MATLAB的place和acker函散得刊;呆后求出状态观测乐的反馈增益。
chapter6极点配置与状态观测器
K
6.3 状态观测器
用 ~x 代替 x
自然要求:
x~ x
渐近意义下: lim~x x 0 t
6.3 状态观测器
uB B
x ∫
+
A
E + x~ ∫
+
A
x
y
C
+
x~ C ~y 观测器
x~
6.3 状态观测器
u
y
+
E
B
+
x~
∫
x~
~y -
C
+
A
观测器
观测器状态方程
x~ A EC x~ Bu Ey
是否可以利用状态反馈,达到极点的 任意配置?
Im
s平面
0
Re
6.2 极点配置
6.2.1 极点配置定理 定理 6.2.1 给定系统
x Ax Bu :
y Cx Du
通过状态反馈 u v kx 任意配置极点的充
要条件 完全能控。
证: 只就单输入系统的情况证明本定理
6.2 极点配置
Re
响应快 响应慢
6.2 极点配置 在看一例:
Im
s平面
0
Re
稳定
6.2 极点配置
2阶系统 3阶系统
1阶系统
6.2 极点配置
Im
s平面
0
Re
稳定
6.2 极点配置
2阶系统 1阶系统
3阶系统
6.2 极点配置
状态反馈后系统极点
v
uB
-
x
∫
x
y
C
+
A
K
极点配置与观测器的设计
0 0 0 1 x 1 1 0 x 0u
0 1 1 0
y011x
求状态反馈增益阵 K ,使反馈后闭环特征值为
1* 2
* 2,3
1j
3
解:因为
1 0 0
ranbkA bA2bran0k 1 13
0 0 1
系统是状态完全能控,通过状态反馈控制律 能
任意 配置闭环特征值。
1) 由
s 0 0
det(sIA)det1 s1 0 s32s2s
K K C0 1 32 00
0 1 s1
得 a12,a21,a30.
2) 由 (s1 * )(s2 * )(s3 * ) (s 2 )(s 1 j3 )(s 1 j3 )
s 3 4 s 2 8 s 8
得 a1 *4,a2 8,a3 8.
3) k a 3 a 3 ,a 2 a 2 ,a 1 a 1 8 ,7 ,2
x1
y 1
0
0
x
2
x3
2. 计算状态反馈矩阵
0 0 10
QCb AbA2b0 10 110
10100990
ranQ kC 3 所以系统能控
计算出状态反馈矩阵 K K 0K 1K 2 4 1 . 2 0 . 1
状态反馈系统的状态图如图(c)所示(没有画出 T F )。
经过结构变换成(d)图所示的状态图
tp
n
1 2
bn 12 224 24 4
将已知数据代入,从前3个指标可以分别求出:
0.707, n9.0 b 9.0
综合考虑响应速度和带宽要求,取 n 。10于是,闭环主导极点
为
s1,2,7.0 取7非j主7.导07极点为
全维状态观测器的设计
实 验 报 告课程 线性系统理论基础 实验日期 2016年 6月 6 日 专业班级 姓名 学号 同组人 实验名称全维状态观测器的设计评分批阅教师签字一、实验目的1. 学习用状态观测器获取系统状态估计值的方法,了解全维状态观测器的极点对状态的估计误差的影响;2. 掌握全维状态观测器的设计方法;3. 掌握带有状态观测器的状态反馈系统设计方法。
二、实验内容开环系统⎩⎨⎧=+=cxy bu Ax x,其中[]0100001,0,10061161A b c ⎡⎤⎡⎤⎢⎥⎢⎥===⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦a) 用状态反馈配置系统的闭环极点:5,322-±-j ; b) 设计全维状态观测器,观测器的极点为:10,325-±-j ; c) 研究观测器极点位置对估计状态逼近被估计值的影响; d) 求系统的传递函数(带观测器及不带观测器时);绘制系统的输出阶跃响应曲线。
三、实验环境 MATLAB6.5四、实验原理(或程序框图)及步骤利用状态反馈可以使闭环系统的极点配置在所希望的位置上,其条件是必须对全部状态变量都能进行测量,但在实际系统中,并不是所有状态变量都能测量的,这就给状态反馈的实现造成了困难。
因此要设法利用已知的信息(输出量y 和输入量x),通过一个模型重新构造系统状态以对状态变量进行估计。
该模型就称为状态观测器。
若状态观测器的阶次与系统的阶次是相同的,这样的状态观测器就称为全维状态观测器或全阶观测器。
设系统完全可观,则可构造如图4-1所示的状态观测器图4-1 全维状态观测器为求出状态观测器的反馈ke 增益,与极点配置类似,也可有两种方法: 方法一:构造变换矩阵Q ,使系统变成标准能观型,然后根据特征方程求出k e ;方法二:是可采用Ackermann 公式:[]Toe Q A k 1000)(1-Φ=,其中O Q 为可观性矩阵。
利用对偶原理,可使设计问题大为简化。
首先构造对偶系统⎩⎨⎧=+=ξηξξTT T b v c A 然后可由变换法或Ackermann 公式求出极点配置的反馈k 增益,这也可由MATLAB 的place 和acker 函数得到;最后求出状态观测器的反馈增益。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验 6 极点配置与全维状态观测器的设计
一、实验目的
1. 加深对状态反馈作用的理解。
2. 学习和掌握状态观测器的设计方法。
二、实验原理
在MATLAB 中,可以使用acker 和place 函数来进行极点配置,函数的使用方法如下:K = acker(A,B,P) A,B为系统系数矩阵,P为配置极点,K为反馈增益矩阵。
K = place(A,B,P) A,B为系统系数矩阵,P为配置极点,K为反馈增益矩阵。
[K,PREC,MESSAGE] = place(A,B,P) A,B为系统系数矩阵,P为配置极点,K为反馈增益矩阵,PREC 为特征值,MESSAGE 为配置中的出错信息。
三、实验内容
1.已知系统
(1)判断系统稳定性,说明原因。
(2)若不稳定,进行极点配置,期望极点:-1,-2,-3,求出状态反馈矩阵k。
(3)讨论状态反馈与输出反馈的关系,说明状态反馈为何能进行极点配置?
(4)使用状态反馈进行零极点配置的前提条件是什么?
1.
(1)
(2)
代码:
a=[-2 -1 1;1 0 1;-1 0 1];
b=[1,1,1]';
p=[-1,-2,-3]';
K=acker(a,b,p)
K =
-1 2 4
(3)讨论状态反馈与输出反馈的关系, 说明状态反馈为何能进行极点配置?
在经典控制理论中,一般只考虑由系统的输出变量来构成反馈律,即输出反馈。
在现代控制理论的状态空间分析方法中,多考虑采用状态变量来构成反馈律,即状态反馈。
从状态空间模型输出方程可以看出,输出反馈可视为状态反馈的一个特例。
状态反馈可以提供更多的补偿信息,只要状态进行简单的计算再反馈,就可以获得优良的控制性能。
(4)使用状态反馈配置极点的前提是系统的状态是完全可控的。
2.已知系统
设计全维状态观测器,使观测器的极点配置在12+j,12-j 。
(1)给出原系统的状态曲线。
(2)给出观测器的状态曲线并加以对比。
(观测器的初始状态可以任意选取)观察实验结果,思考以下问题:
(1)说明反馈控制闭环期望极点和观测器极点的选取原则。
(2)说明观测器的引入对系统性能的影响。
(1)A=[0 1;-3 -4];
B=[0;1];
C=[2 0];
D=[];
G=ss(A,B,C,D);
x=0:0.001:5;
U=0*(x<0)+1*(x>0)+1*(x==0);
X0=[0 1]';
T=0:0.001:5;
lsim(G,U,T,X0);
(2)代码如下:A=[0 1;-3 -4];
B=[0;1];
C=[2 0];
D=[];
G=ss(A,B,C,D);
v=[-12+j,-12-j];
L=(acker(A',C',v))'
K=acker(A,B,v)
I=eye(2);
G2=ss(A-B*K,B,C,D); t=0:0.001:5;
t0=0;
U=stepfun(t,t0);
X0=[0 1]';
T=0:0.001:5;
lsim(G,U,T,X0); hold on ;
lsim(G2,U,T,X0);
L =
10
31
K =
142 20
蓝色线为原系统,红色线为观测器
观察实验结果,思考以下问题:
(1)说明反馈控制闭环期望极点和观测器极点的选取原则。
答:线性定常系统的稳定性和动态性能很大程度上是由闭环系统的极点位置决定的,因此反馈控制配置极点要使系统具有所期望的性能品质,改善性能指标。
而观测器的极点对于其性能也有很大影响,首先要保证极点均具有负实部,并通过极点配置应该使观测器具有期望的响应速度和抗干扰能力。
(2)说明观测器的引入对系统性能的影响。
答:实际系统的状态变量不可能都是可直接测量的,从而给状态反馈的实现造成困难。
而通过引入观测器,可实现状态重构,保证观测器的状态可以很快的逼近控制对象的状态,并且观测器的状态可以直接得到,可以用其代替实际状态进行状态反馈。
四、实验体会
这次实验讨论了状态反馈和输出反馈的关系,利用状态反馈进行极点配置,加深对状态反馈作用的理解。
利用MATLAB仿真设计状态观测器。
加深了对课本上知识的理解。
最新文件---------------- 仅供参考--------------------已改成word文本--------------------- 方便更改。