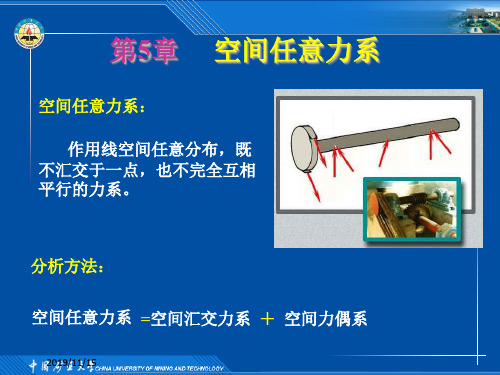
第5章 空间任意力系
工程力学课后习题答案

第一章 静力学基本概念与物体的受力分析下列习题中,未画出重力的各物体的自重不计,所有接触面均为光滑接触。
1.1 试画出下列各物体(不包括销钉与支座)的受力图。
解:如图(g)(j)P (a)(e)(f)WWF F A BF DF BF AF ATF BA1.2画出下列各物体系统中各物体(不包括销钉与支座)以及物体系统整体受力图。
解:如图F BB(b)(c)C(d)DCF D(e)AF D(f)FD(g)(h)EOBO EFO(i)(j) BYFB XBFXE(k)1.3铰链支架由两根杆AB、CD和滑轮、绳索等组成,如题1.3图所示。
在定滑轮上吊有重为W的物体H。
试分别画出定滑轮、杆CD、杆AB和整个支架的受力图。
解:如图'D1.4题1.4图示齿轮传动系统,O1为主动轮,旋转方向如图所示。
试分别画出两齿轮的受力图。
解:1o xF2o xF2o yF o yFFF'1.5结构如题1.5图所示,试画出各个部分的受力图。
解:第二章 汇交力系2.1 在刚体的A 点作用有四个平面汇交力。
其中F 1=2kN ,F 2=3kN ,F 3=lkN , F 4=2.5kN ,方向如题2.1图所示。
用解析法求该力系的合成结果。
解 00001423cos30cos45cos60cos45 1.29Rx F X F F F F KN ==+--=∑ 00001423sin30cos45sin60cos45 2.54Ry F Y F F F F KN ==-+-=∑2.85R F KN ==0(,)tan63.07Ry R RxF F X arc F ∠==2.2 题2.2图所示固定环受三条绳的作用,已知F 1=1kN ,F 2=2kN ,F 3=l.5kN 。
求该力系的合成结果。
解:2.2图示可简化为如右图所示023cos60 2.75Rx F X F F KN ==+=∑013sin600.3Ry F Y F F KN ==-=-∑2.77R F KN ==0(,)tan6.2Ry R RxF F X arc F ∠==-2.3 力系如题2.3图所示。
5章空间力系(交)

Fz F cos
由于力与轴平行 或相交时力对该轴的 矩为零,则有
M x F M x FZ Fz AB CD Fl bcos M y F M y FZ Fz BC Fl cos M z F M z Fx Fx AB CD Fl bsin
z Fz
F
x
Fx
Fxy
y Fy
二、 空间汇交力系的合成与平衡
1. 合成 将平面汇交力系合成结果推广得:
FR F1 F2 F n Fi
解析法 FR FRx i FRy j FRz k FR Fx i Fy j Fz k
合力的大小和方向为:
FR ( Fx )2 ( Fy )2 ( Fz )2
4力偶可改装性
4.4 空间力偶等效定理
空间力偶的等效条件是:两个力偶的力偶矩矢相等。
4、空间力偶系的合成 空间力偶系合成的最后结果为一个合力偶,
合力偶矩矢等于各力偶矩矢的矢量和。即:
M M1 M2 Mn Mi
根据合矢量投影定理:
Mx Mx, My My, Mz Mz
列平衡方程:(约束特点)
X 0 : X A TH cos 60 sin 45 TG cos 60 sin 45 0
Fx 0,
Fy 0,
Fz 0
M x (F ) 0, M y (F ) 0, M z (F ) 0
空间任意力系平衡的必要与充分条件为:力系中 各力在三个坐标轴上投影的代数和等于零,且各力对 三个轴的矩的代数和也等于零。
空间平行力系的平衡方程
Fz 0 Mx 0 My 0
工程力学(静力学与材料力学)单辉祖5

Generated by Foxit PDF Creator © Foxit Software For evaluation only.
工程力学电子教案
第五章 空间任意力系
X 0, TA TB cos60 0
T A TB cos60 3 1 80 11.5 ( N ) 6 2
Z F cos F sin
力沿坐标轴分解
Generated by Foxit PDF Creator © Foxit Software For evaluation only.
由式(*)知 合力的大小:
* 合力的方向:
空间汇交力系的合力与方向余弦为:
Generated by Foxit PDF Creator © Foxit Software For evaluation only.
力对轴的矩的概念
P39--P40
Generated by Foxit PDF Creator © Foxit Software For evaluation only.
Generated by Foxit PDF Creator © Foxit Software For evaluation only.
[例] 已知:P=2000N, C点在Oxy平面内。求:力P对坐标轴的矩。
解:
Pz Psin45 Pxy Pcos45 Px Pcos45sin60 Py Pcos45cos60
力对轴的矩的解析式
mx ( F ) yFz zFy m y ( F ) zFx xFz mz ( F ) xFy yFx
力对轴的矩的解析式
Generated by Foxit PDF Creator © Foxit Software For evaluation only.
《工程力学》课程的知识体系和内容结构
《工程力学》课程的知识体系和内容结构1、课程的知识体系《工程力学》是一门是既与工程又与力学密切相关的技术基础课程,在基础课程和专业课程之间起桥梁作用。
通过本课程的学习,使学生掌握工程力学的理论和方法,具备从力学角度对工程问题的思维能力和初步解决此类问题的实践能力,并且获得大量的工程背景知识,为学习后续课程、掌握机械等工程设计技术打下牢固的基础。
本课程涵盖了“静力学”和“材料力学”两部分的内容。
“静力学”主要研究刚体的受力和平衡的规律;“材料力学”主要研究构件强度、刚度和稳定性的问题,在保证构件既安全适用又经济的条件下,为合理设计和使用材料提供理论依据。
静力学主要研究的问题:物体的受力分析、力系的简化和力系的平衡条件。
材料力学主要研究的问题:杆件在发生拉伸或压缩、剪切、扭转和弯曲基本变形时内力、应力和变形的计算,在各种基本变形下的强度和刚度计算;应力状态的基本理论;材料在复杂应力作用下破坏或失效规律及其应用;压杆稳定性问题。
2、课程的内容结构第一章介绍静力学的基本概念,常见的几类典型约束及约束力的特征,物体的受力分析。
第二章介绍汇交力系的简化和平衡条件。
第三章介绍力偶的概念及其对刚体的作用效应,力偶系的合成与平衡条件。
第四章介绍平面任意力系的简化、平衡条件和平衡方程,刚体系的平衡问题求解。
第五章介绍空间任意力系的简化和平衡条件。
第六章静力学专题:桁架杆件内力的求解;滑动摩擦、摩擦角和自锁现象、以及滚动摩擦的概念。
第七章介绍材料力学的研究对象、基本假设、外力和内力、应力和应变的概念。
第八章介绍拉压杆的内力、应力、变形及材料在拉伸与压缩时的力学性能,拉压杆的强度和刚度问题,简单静不定问题,拉压杆连接部分的强度计算。
第九章介绍圆轴扭转的外力、内力、应力与变形,圆轴的强度和刚度计算,静不定轴的扭转问题。
第十章介绍梁的外力和内力(剪力与弯矩),内力图的绘制。
第十一章介绍对称弯曲时梁的正应力、切应力、强度计算和梁的合理强度设计。
工程力学第五章:重心及形心
W x
i i
yC
y
W Wi yi
zi xC xi
zC
zC
W Wi zi W
yC
x
有影响,可使物体
被分割成任意个部分进行计算。通常,对均质连续的物体 通常对物体在极限情况下 (n-∞)进行分割, 此时重心坐标 公式转化成积分形式。
2 R sin 3
y
R
2 C
x
扇形形心为
xC 2 R sin 3
y
当α为90°时,扇形为半圆
R C
x
xC
2 R sin
2 4R 3 3 2
对这类常用的简单几何图形和均质物体的重心或形心位置,均 可采用积分法进行求解。也可直接查询工程手册的形心表。
常 见 平 面 图 形 的 形 心 公 式 表
C
C
C
2. 积分法
例2:求半径为R,顶角为2 的扇形的形心。
如图所示建立参考直角坐标系,x为对称轴 yC 0
y
微元部分的面积为:
A
d
1 1 2 dA dL R R d 2 2
dA
O
C
B
扇形形心为
2 微元部分的形心坐标:x R cos 3 2 1 2 xdA R cos R d 3 2 A x x C 2 A R 2 2 1 3 R cos d 3 R 2 sin 2 R 3
M z ( FR ) M z ( F1 ) M z ( F2 ) M z ( Fn ) M z ( Fi )
即:空间力系的合力对某一轴的矩,等于力系中所有 分力对同一轴的矩的代数和。
空间任意力系
FC
最大载重Pmax是多少。
Q FB
P
D
解: 取起重机为研究对象
A
B,C
My(F)0, FAaco3s0Qa3co3s0Pclos0
MC'x(F)0,
a FA2
FBaQa2P(a2lsin)0
y C
x’
Fz 0, FAFBFCPQ0
A
ED
x
解得: FA=19.3kN, FB=57.3kN, FC=43.4kN
d O1
O
MO MO cos MO MO sin
d MO MO sin
FR
FR
一般情形下空间任意力系可合成为力螺旋
(4) 空间任意力系平衡的情形
● F′R=0,MO=0
2019/11/15
原力系平衡
内容回顾
空间力系的简化与合成
主矢
主矩
最后结果
说
明
FR′ = 0
MO = 0 MO≠0
§5-5 空间任意力系的平衡条件及其应用
1、平衡条件及平衡方程:
平衡条件:
由平衡力系定理可知,空间一般力系平衡的充要条件:力 系的主矢和对任一点的主矩都等于零,即:
平衡方程:
FR Fi 0
M O M O i 0
由主矢与主矩的计算式,有
F R (F x F x i )0 2 i, (F F yy ) i2 i0 ,(F F zz i )i2 0
② 空间任意力系的平衡条件及其应用;
2019/11/15
§5-4 空间任意力系的简化
1. 空间力线平移定理
作用于刚体的力 F 可等效地平移到刚体上的任一点O, 但须附加一力偶,此附加力偶矩 矢M 等于原力对平移点O 的力矩矢MO(F)。
理论力学复习总结(知识点)
第一篇静力学第1 章静力学公理与物体的受力分析1.1 静力学公理公理1 二力平衡公理:作用于刚体上的两个力,使刚体保持平衡的必要和充分条件是:这两个力大小相等、方向相反且作用于同一直线上。
F=-F’工程上常遇到只受两个力作用而平衡的构件,称为二力构件或二力杆。
公理2 加减平衡力系公理:在作用于刚体的任意力系上添加或取去任意平衡力系,不改变原力系对刚体的效应。
推论力的可传递性原理:作用于刚体上某点的力,可沿其作用线移至刚体内任意一点,而不改变该力对刚体的作用。
公理3 力的平行四边形法则:作用于物体上某点的两个力的合力,也作用于同一点上,其大小和方向可由这两个力所组成的平行四边形的对角线来表示。
推论三力平衡汇交定理:作用于刚体上三个相互平衡的力,若其中两个力的作用线汇交于一点,则此三个力必在同一平面内,且第三个力的作用线通过汇交点。
公理4 作用与反作用定律:两物体间相互作用的力总是同时存在,且其大小相等、方向相反,沿着同一直线,分别作用在两个物体上。
公理5 钢化原理:变形体在某一力系作用下平衡,若将它钢化成刚体,其平衡状态保持不变。
对处于平衡状态的变形体,总可以把它视为刚体来研究。
1.2 约束及其约束力1.柔性体约束2.光滑接触面约束3.光滑铰链约束第2章平面汇交力系与平面力偶系1.平面汇交力系合成的结果是一个合力,合力的作用线通过各力作用线的汇交点,其大小和方向可由失多边形的封闭边来表示,即等于个力失的矢量和,即F R=F1+F2+…..+Fn=∑F2.矢量投影定理:合矢量在某轴上的投影,等于其分矢量在同一轴上的投影的代数和。
3.力对刚体的作用效应分为移动和转动。
力对刚体的移动效应用力失来度量;力对刚体的转动效应用力矩来度量,即力矩是度量力使刚体绕某点或某轴转动的强弱程度的物理量。
(Mo(F)=±Fh)4.把作用在同一物体上大小相等、方向相反、作用线不重合的两个平行力所组成的力系称为力偶,记为(F,F’)。
工程力学第五章 空间力系(2)
14
下面用积分法求物体的重心实例: [例] 求半径为R,顶角为2 的均质圆弧的重心。
解:由于对称关系,该圆弧重心必在Ox轴,即yC=0。取微段
dL Rd
x Rcos
x dL L xC L
O
2 cos R d
2R
xC
Rsin
物体分割的越多,每一小部分体积越小,求得的重心
Pxi xC ,
位置就越准确。在极限情况下,(n),常用积分法求物
体的重心位置。
9
设i表示第i个小部分每单位体积的重量,⊿Vi第i个小 体积,则
Pi i Vi
代入上式并取极限,可得:
xdV ydV zdV V V V xC , yC , zC P P P
Pi zi PzC Pi zi , zC
P
综合上述得重心坐标公式为:
Pi xi Pi yi Pi zi xC , yC , zC P P P
12
若以△Pi= △mig , P=Mg 代入上式可得质心公式
m i x i mi yi mi zi xC , yC , zC M M M
空 间 汇 交 力 系
X 0 Y 0 Z 0
空 间 轴 力 系
X 0 m y 0 mz 0
∥x
19
X 0
面空 的间 力 系 ∥xoy
Y 0 m x 0 m y 0 mz 0
X 0 Y 0 m x 0 m y 0 mz 0 m x' 0
m y 0; Pz 50100Q x 0,Q 746( N )
3
m z A 0; 300Px 50Py 200X B 50Q cos200 0, X B 437( N ) X 0; X A X B Px Q cos200 0, X A 729( N ) m x A 0; 200Z B 300Pz 50Q sin200 0, Z B 2040( N ) Z 0; Z A Z B Pz Q sin200 0, Z A 385( N )
第5章 空间任意力系
例5-8 已知:Fx 4.25N,Fy 6.8N, Fz 17N, Fr 0.36 F , R 50mm , r 30mm 各尺寸如图
求: (1) Fr , F (2)A、B处约束力(3)O 处约束力
解:研究对象1:主轴及工件,受力图如图
F F F
x y
0 0 0
物体的重心(形心)与静矩 1. 计算重心坐标的公式 对y轴用合力矩定理
有 对x轴用合力矩定理
有
再对x轴用合力矩定理
则计算重心坐标的公式为 (4–14) 对均质物体,均质板状物体,有
称为重心或形心公式
2. 确定重心的悬挂法与称重法 (1) 悬挂法
图a中左右两部分的重量是否一定相等?
(2) 称重法
例5-2,有点问题? 已知: 物重P=10kN,CE=EB=DE; 30 求:杆受力及绳拉力
0
,
解:画受力图如图, 列平衡方程
F F F
x
0
F1 sin 45 F2 sin 45 0
y
0 0
FA sin 30 F1 cos 45 cos 30 F2 cos 45 cos 30 0 F1 cos 45 sin 30 F2 cos 45 sin 30 FA cos 30 P 0 结果: F1 F2 3.54kN FA 8.66kN
求:力
对 x, y, z轴的矩
=0
=
= =
+0
-
= =
则
+ 0
即,力对点的矩矢在过该点的某轴上的投影,等于 力对该轴的矩。
§5–2 空间任意力系的平衡条件
空间任意力系平衡的充分必要条件:该力系的主矢、 主矩分别为零。 1.空间任意力系的平衡方程
空间任意力系
解:取系统为研究对象 x
a
b
FAz
A
FAx
P
c
FBz
y B
FBx
My(F) 0, Mx(F) 0, Mz(F) 0, Fx 0, Fz 0,
2019/10/27
(F2 F1)RPr0
F 1 2 F 2 8 kN
FBz(bc) Pb 0
F Ax 15 . 6 kN
E
MCB(F) 0, F1 acos30 F4 sin30 acos30 0
MCA(F) 0, F2 acos30 F5 sin30 acos30 0
MAB(F) 0, F3 acos30 F6 sin30 acos30 0
解得 F 4 F 5 F 6 4 3 M a(压 ),F 1 F 2 F 3 2 3 M a(拉 )
空间力偶系
2019/10/27
M x(F ) 0 M y(F ) 0 M z(F ) 0
FZ 0 M x(F ) 0 M y(F ) 0
平面任意力系
Fx 0 Fy 0 M z(F ) 0
空间力系平衡方程:
F xi 0 F yi 0 F zi 0 M xi 0 M yi 0 M zi 0
主矩的方向: coM s(O,x)
Mx(Fi), MO
2019/10/27
简化结果小结:
向一点O 简化
空间 一般力系
力线平移定理
一个力 FR
F i
作用于简化中心O
与简化中心O点位置无关
一个力偶 M M O M O (F i)
与简化中心O点位置有关
2019/10/27
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
7
例题
空间任意力系
例题2
解:
由图示可以求出力F 在 各坐标轴上的投影和力F 作 用点C 的坐标分别为:
Fx F coscos
Fy F cos sin
Fz F sin
x= a = 4 m
y= b = 6 m
z= c =-3 m
8
例题
空间任意力系
例题2
则可求得力F 对坐标轴之矩 以及对原点O之矩的大小和方向。
FD 5.8 kN
解方程得 FB 7.777 kN
28
FA 4.423 kN
例题
空间任意力系
例题9
镗刀杆的刀头在镗削工件时受到切向力Fz, 径向力Fy,轴向力 Fx的作 用。各力的大小Fz=5 000 N, Fy=1 500 N, Fx=750 N,而刀尖B 的坐标 x = 200 mm,y = 75 mm,z = 0。如果不计刀杆的重量,试求刀杆根部A 的约束 力的各个分量。
M y 0, F2xl2 Fzr Fx (l1 l2 ) 0
Mz 0, Fyr MO 0
由以上方程可以求出所有未知量。
20
例题
空间任意力系
例题6
水平传动轴上装有两个胶带轮C和D,半径分别是r1=0.4 m , r2=0.2 m . 套在C 轮上的胶带是铅垂的,两边的拉力T1=3 400 N,T2=2 000 N,套在D轮 上的胶带与铅垂线成夹角α=30o,其拉力F3=2F4。求在传动轴匀速转动时, 拉力F3和F4以及两个径向轴承处约束力的大小。
系统受空间任意力系的作用, 可写出六个平衡方程。
Fx 0,
FAx FBx (F3 F4 ) sin 30 0
Fz 0,
FAz FBz (F3 F4 ) cos 30 (F1 F2 ) 0
Mx 0, FAZ 0.25 m FBZ 1.25 m (F3 F4) cos 30 0.75 m 0
19
例题
空间任意力系
例题5
系统受空间任意力系的作用,可 写出六个平衡方程。
Fx 0, Fy 0, Fz 0,
F1x F2x Fx 0 F1y F2 y Fy 0 F1z Fz FO 0
M x 0, F2 yl2 Fy (l1 l2 ) 0
空间任意力系
例题4
解: 令BD=s,将力F1和F2向
D点简化得主矢F'R和主 矩MD 在坐标轴x1,y1上 的投影:
F 'Rx1 F1 F 'Ry1 F2 M x1 F2s
M y1 F1l s
16
例题
空间任意力系
例题4
因为向D点简化是力螺旋,即 有F'R//MD ,故
M ABF MB F
F cos BC cos 3.18 N m
12
例题
空间任意力系
例题3
z
B
x
F
Cβ
α
y
F
y1
力F 对点B 的矩可如下计算。 坐标原点取在B点,C点的坐标:
x=0, y=0.18 m, z=0
力F 的各投影:
Fx F cos cos 17.7 N
MO M x2 M y2 M z2 124.3 N m
9
例题
空间任意力系
例题2
力F 对原点O之矩方向余弦:
cos( MO , i)
Mx MO
0.845
cos( MO ,
j)
My MO
0.531
cos( MO , k)
Mz MO
0.064
10
例题
空间任意力系
力FAz和FBz对轴 x 的矩分别 为-Faz×0.25 m和FBz × 1.25 m。
力F3和F4可分解为沿轴 x 和沿轴 z 的两个分量,其中沿轴 x 的分量对 轴 x 的矩为零。所以力F3和F4对轴 x 的矩等于-(F3+F4)cos 30o × 0.75 m
23
例题
空间任意力系
例题6
A
x1
Fy F cos sin 17.7 N Fz F sin 43.3 N
于是根据力对轴的矩之解析表达式 M x F yFz zFy
M y F zFx xFz
M z F xFy yFx
13
例题
空间任意力系
例题3
z
B
x
F
例题1
5
例题
空间任意力系
例题1
方法2 应用力对轴的矩之解析表达式求解。
M x F yFz zFy M y F zFx xFz M z F xFy yFx
因为力在坐标轴上的投影分别为:
Fx F sin , Fy 0, Fz F cos
cos( MB ,
j)
zFx xFz MB
cos( MB, k)
xFy yFx MB
14
例题
空间任意力系
例题4
铅直桅杆AB受彼此互 相垂直的两个水平力F1和 F2的作用,并由张索CD维 持平衡。已知尺寸l,力F1 和F2,向D点简化的结果是 力螺旋,试求D点的位置。
15
例题
第5章 空间任意力系
动画 例题
1
第5章 空间任意力系
动 画
2
第5章 空间任意力系
例 题
3
例题
空间任意力系
例题1
手柄ABCE在平面Axy内, 在D处作用一个力F,如图所 示,它在垂直于y轴的平面 内,偏离铅直线的角度为α。
如果CD=b,杆BC平行于x轴,
杆CE平行于y轴,AB和BC的 长度都等于l。试求力F 对x, y和z三轴的矩。
M y 0, (F1 F2 ) 0.4 m (F3 F4 ) 0.2 m 0 Mz 0, FAx 0.25 m FBx 1.25 m (F3 F4 ) sin 30 0.75 m 0
24
又已知F3 =2F4,故利用以上方程可以解出所有未知量。
F 'Rx1 M x1 F 'Ry1 M y1
F1 F2
F2 s
F1l s
从而解得所求距离
s
F1 2 F12 F22
l
17
例题
空间任意力系
例题5
涡轮发动机的涡轮叶片上受 到的燃气压力可简化成作用在涡轮 盘上的一个轴向力和一个力偶。图 示中FO , MO , 斜齿轮的压力角为α, 螺旋角为β,节圆半径r及l1 , l2尺寸 均已知。发动机的自重不计,试求 输出端斜齿轮上所受的反作用力F 以及径向推力轴承O1和径向轴承 O2 处的约束力。
21
例题
空间任意力系
例题6
解:
以整个系统为 研究对象,建立如 图坐标系Oxyz,画
出系统的受力图。
为了看清胶带 轮C和D的受力情 况,作出右视图。
22
例题
空间任意力系
例题6
下面以对 x 轴之矩分析为例 说明力系中各力对轴之矩的求法。
力FAx和FBx平行于轴 x ,力F2 和F1通过轴 x 。它们对轴x 的矩 均等于零。
25
例题
z
FA
O2
G
空间任意力系
例题7
FC
y
解:
1.取货车为研究对象,受
力分析如图。
2.列平衡方程。
O3
Fz 0, FA FB FC G 0
Mx 0, FC O3D G EM 0
M y 0, G O1E FC O1D FB O1O2 0
例题
空间任意力系
例题7
A
E
O1 M
D O2
B
G
在三轮货车上放着一重
G=1 000 kN的货物,重力G的
作用线通过矩形底板上的点M。
O3
已知O1O2=1 m, O3D=1.6 m,
C
O1E=0.4 m,EM =0.6 m,点D
是线段O1O2的中点,EM⊥
O1O2,试求A,B,C各处地
面的铅直约束力。
Cβ
α
y
F
y1
可得力F 对坐标轴的矩:
MBx 7.80 N m
M By 0
MBz 3.18 N m M AB(F)
此后可按下式计算出力矩 M B(F)
A
x1
的大小和方向余弦。
MB(F)
M
2 Bx
M
2 By
M
2 Bz
cos( MB, i)
yFz zFy MB
力作用点D 的坐标为:
x l, y l b, z 0
则
M x F yFz zFy l b F cos 0 F l bcos
M y F zFx xFz 0 l F cos Fl cos
18
例题
空间任意力系
例题5
解:
取整个系统为研究对象,建立 如图坐标系O1xyz,画出系统的受 力图。
其中在径向推力轴承O1处的约束 力有三个分量。在径向轴承O2处的 约束力只有两个分量。
在斜齿轮上所受的压力F 可 分解成三个分力。周向力Fy ,径 向力Fx 和轴向力Fz 。其中:
Fx F sin , Fy F cos cos , Fz F cos sin