基于PLC控制的变速器搬运机械手系统设计
基于PLC控制的搬运机械手设计

l B 1
1 B 2
横臂 收回到位
横臂 伸出到位
手 爪 松 开 状 态
1 0 . 2
1 0 . 3
1 0 . 4
2 B 1
2 B 2
3 B 1
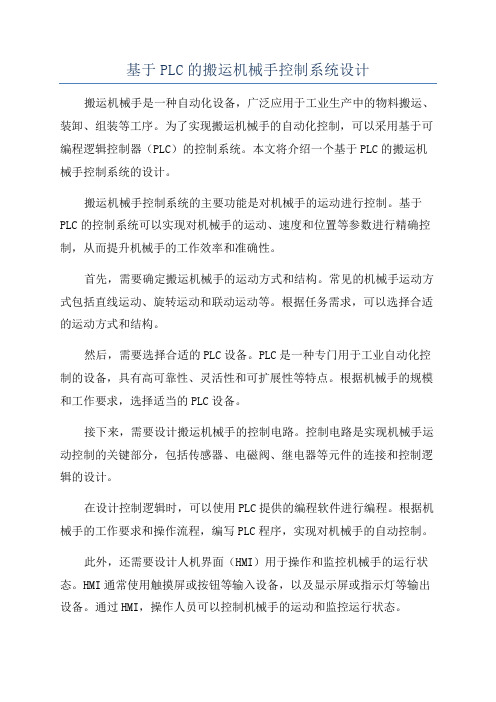
搬运机械手是 一个整体的单元 , 其动作顺序为 : 开始_ + 横 臂 伸 出一 竖 臂 伸 出一 手 指 夹 紧 一 竖 臂 收 回 横臂收回_ + 摆动右摆 横臂伸出一竖臂伸出_ ÷
急停
I 2 7
摆动 气缸顺时针 摆动气 缸逆时针 双 活塞杆气缸 杆收 回 双 活塞杆气缸杆伸 出
气 爪 开
Q o . 0 Q O . 1 Q O . 2 Q O . 3
Q O . 4
1 Y1 l Y 2 2 Y l 2 Y 2
3 Yl
通 过 对 搬 运 机 械 手 控 制 线 路 及 加 工 工 艺 的 分
采用组态监控 ,为搬运机械手 的运动提供 了一个仿 析 , 输 入信号 为按钮 、 选择开关 、 接近开关等主令 电 真的工业环境 , 通过软件控制代替硬接线控制 , 以软 器 ; 输 出信号为继电气线圈 、 电磁阀等控制 电器 。结 件编程 完成搬 运机械手 运动过 程 的动作修 改和控 合搬运机械手 的运动过程 ,该 系统需要 1 5 个输入 制, 在一定程度上提高了搬运机械手系统的灵活性。
要: 传统的搬运机械手采用硬接线控制 , 系统接 线复杂 , 灵活性 有待提 高。提 出了一种基 于 P L C控 制的搬运机械 手
设计 方案 , 并采用 MCG S组 态监控 。 以软件编程代替硬件控 制完成机械 手的运 动控 制 , 在一定程度上提 高了搬运机械 手
系统 的灵 活性 。
基于PLC的搬运机械手控制系统设计
基于PLC的搬运机械手控制系统设计搬运机械手是一种自动化设备,广泛应用于工业生产中的物料搬运、装卸、组装等工序。
为了实现搬运机械手的自动化控制,可以采用基于可编程逻辑控制器(PLC)的控制系统。
本文将介绍一个基于PLC的搬运机械手控制系统的设计。
搬运机械手控制系统的主要功能是对机械手的运动进行控制。
基于PLC的控制系统可以实现对机械手的运动、速度和位置等参数进行精确控制,从而提升机械手的工作效率和准确性。
首先,需要确定搬运机械手的运动方式和结构。
常见的机械手运动方式包括直线运动、旋转运动和联动运动等。
根据任务需求,可以选择合适的运动方式和结构。
然后,需要选择合适的PLC设备。
PLC是一种专门用于工业自动化控制的设备,具有高可靠性、灵活性和可扩展性等特点。
根据机械手的规模和工作要求,选择适当的PLC设备。
接下来,需要设计搬运机械手的控制电路。
控制电路是实现机械手运动控制的关键部分,包括传感器、电磁阀、继电器等元件的连接和控制逻辑的设计。
在设计控制逻辑时,可以使用PLC提供的编程软件进行编程。
根据机械手的工作要求和操作流程,编写PLC程序,实现对机械手的自动控制。
此外,还需要设计人机界面(HMI)用于操作和监控机械手的运行状态。
HMI通常使用触摸屏或按钮等输入设备,以及显示屏或指示灯等输出设备。
通过HMI,操作人员可以控制机械手的运动和监控运行状态。
最后,进行系统调试和测试。
在将系统投入使用之前,需要进行调试和测试,确保搬运机械手的运动控制正常,并满足工作要求。
总结起来,基于PLC的搬运机械手控制系统设计包括确定运动方式和结构、选择合适的PLC设备、设计控制电路、编写PLC程序、设计人机界面以及进行系统调试和测试等步骤。
通过PLC控制系统的应用,可以提高机械手的自动化程度,提升生产效率和产品质量。
基于PLC的搬运机械手控制系统设计

基于PLC的搬运机械手控制系统设计搬运机械手是工业生产中常用的一种机器人,目的是为了将物品从一个地方搬到另一个地方,以实现生产线的自动化生产。
为了方便操作和控制机械手的运动,我们常使用PLC进行控制。
本文将详细介绍基于PLC的搬运机械手控制系统设计并分为以下几个部分:系统设计、硬件设计、软件设计和测试与优化。
系统设计在设计搬运机械手的控制系统前,需要明确其基本能力以及操作条件。
本文需要实现的是一个能够在工业生产上自动完成货物的移动,如从一个点到达另一个点,或从一个点将货物取下并放入另一个点的机械手控制系统。
硬件设计在硬件方面,机械手的结构以及体积会影响到设计的复杂度和控制的难度。
机械手的操作部分包括控制电路、执行器驱动电路、电源等。
现在,我们来介绍每个部分的主要内容。
控制电路部分包括PLC、IO模块等。
PLC是机械手控制的核心,负责读取传感器信号并控制执行器的动作。
IO模块则负责将信号转换为PLC能接受的信号进行处理。
执行器驱动电路部分主要负责控制电机动作。
电机的选择与应用需要根据机械手的具体要求而定,需要注意的是,电机的转矩和功率需要协调匹配,还需要注意电机的供电和控制电路之间的配合问题。
电源系统是机械手控制系统的基础之一,电源的大小和控制器的匹配与应用直接关系到系统的正常运行。
需要根据需要提供相应的电压以及功率供给系统。
软件设计在软件设计方面,我们借助PLC程序进行控制,根据机械手的执行需要编写相应的程序,实现机械手的移动、旋转、夹取或放置操作。
具体流程如下:1. 初始化- 设定初始位置和状态等参数;2. 等待操作信号- 根据设定的信号进行等待;3. 传感器检测- 检测对象的位置和状态;4. 判断操作- 根据传感器检测结果进行相应操作;5. 输出控制信号- 控制执行器动作,改变机械手所处的位置和状态。
测试与优化测试与优化是机械手控制系统设计的重要一步,目的是检查系统的稳定性和准确性。
在测试过程中,需要测试机械手的各种运动状态,比如加速度、负载、速度等参数,以确定机械手的质量和性能优化方向。
《2024年基于PLC的工业机械手运动控制系统设计》范文

《基于PLC的工业机械手运动控制系统设计》篇一一、引言随着工业自动化技术的不断发展,机械手运动控制系统在工业生产中扮演着越来越重要的角色。
传统的机械手控制系统通常采用单片机或嵌入式系统进行控制,但由于其处理能力和稳定性的限制,已经无法满足现代工业生产的高效、精确和可靠的要求。
因此,本文提出了一种基于PLC(可编程逻辑控制器)的工业机械手运动控制系统设计。
该系统采用先进的PLC技术,能够有效地提高机械手的控制精度、稳定性和可靠性,满足现代工业生产的需求。
二、系统设计1. 硬件设计本系统硬件部分主要包括PLC控制器、机械手本体、传感器、执行器等部分。
其中,PLC控制器是整个系统的核心,采用高性能的PLC模块,能够实现对机械手的精确控制。
机械手本体包括手臂、手腕、抓手等部分,通过执行器进行驱动和控制。
传感器则用于检测机械手的运动状态和位置信息,为控制系统的精确控制提供支持。
2. 软件设计软件部分是整个系统的关键,它决定了机械手的运动方式和控制精度。
本系统采用PLC编程软件进行程序设计,通过编写梯形图或指令代码来实现对机械手的控制。
程序包括主程序和控制程序两部分。
主程序负责控制整个系统的运行流程,而控制程序则负责实现对机械手的精确控制。
3. 控制策略本系统采用基于位置的控制策略,通过传感器实时检测机械手的位置信息,将位置信息与目标位置进行比较,计算出位置偏差,并通过执行器对机械手进行精确的控制。
同时,系统还具有速度控制和力控制等功能,能够根据实际需求进行灵活的调整和控制。
三、系统实现1. 硬件连接硬件连接是整个系统实现的基础。
首先需要将PLC控制器与机械手本体、传感器、执行器等部分进行连接,确保各部分之间的通信和信号传输畅通。
同时,还需要对硬件设备进行调试和测试,确保其正常工作。
2. 程序设计程序设计是整个系统的核心部分。
根据实际需求和机械手的运动特性,编写相应的梯形图或指令代码,实现对机械手的精确控制。
(完整版)基于PLC的搬运机械手控制系统设计112
基于PLC的搬运机械手控制系统设计摘要随着工业自动化的普及和发展,控制器的需求量逐年增大,搬运机械手的应用也逐渐普及,主要在汽车,电子,机械加工、食品、医药等领域的生产流水线或货物装卸调运,可以更好的节约能源和提高运输设备或产品的效率,以降低其他搬运方式的限制和不足,满足现代经济发展的要求。
本机械手的机械结构主要是曲轴在两条生产线之间搬运任务的搬运机械手控制系统进行设计。
采用了电气一体化的设计方案,使用带自锁功能的气缸实现了机械手对工件的抓放和保证了在断气状态下机械手状态的保持,通过伺服电机来实现机械手在水平、竖直方向快速精确的移动。
采用SIEMENS公司的SIMATIC S7-200系列PLC 作为核心控制器,外扩定位模块EM253模块对伺服电机进行精确的定位控制,从硬件和软件两个方面进行设计,完成了PLC在搬运机械手中硬件连接,I/O点分配和应用程序的设计,实现了机械手的上电初始化、零点复位、故障报警、手动运行、半自动运行和在无人看守时的自动运行。
最终达到设计要求,完成搬运目的。
关键词搬运机械手定位模块EM2253控制系统可编程PLC SIMATIC S7-200 系列PLC 核心控制器。
目录目录 (2)1引言 (1)1.1 搬运机械手的应用简况 (1)1.2机械手的应用意义 (2)2系统设计 (2)2.1系统结构及流程 (2)2.2系统主要部件选择 (4)2.2.1气缸的选择 (5)2.2.2阀门的选择 (6)2.2.3行程开关的选择 (6)2.2.4接近开关的选择 (6)2.2.5驱动电机的选择 (6)3控制系统的硬件设计 (7)3.1控制系统功能 (7)3.2控制系统硬件结构 (8)3.2.1位控模块 (8)3.2.3控制系统硬件结构 (9)3.3操作面板的设计 (9)3.4 PLC系统设计 (11)3.4.1 PLC 的I/O 分配表 (11)3.4.2 PLC 的I/O 接线图 (11)3.5运动控制系统的实现 (12)3.6控制系统电路设计 (17)4系统软件的设计与实现 (19)4.1系统工作方式 (19)4.2程序设计 (19)4.2.1主程序设计 (19)4.2.2初始化子程序设计 (20)4.2.3复位子程序设计 (20)4.2.4报警子程序设计 (21)4.2.5手动运行子程序设计 (21)4.2.6半自动运行子程序 (22)4.2.7自动子程序设计 (23)5结束语 (25)致谢 (26)参考文献 (27)附录1系统配件清单 (28)附录2程序清单 (28)1引言1.1搬运机械手的应用简况在现代工业中,生产过程的机械化、自动化已成为突出的主题。
基于PLC的搬运机械手控制系统的设计
基于PLC的搬运机械手控制系统的设计本文是基于PLC的搬运机械手控制系统的设计。
根据搬运机械手控制系统给出了控制流程图、阐述了用FX2N-1PG作上位机控制步进电机按一定角度旋转原理、用PLC作上位机控制伺服电机动作原理。
详细描述了基于PLC的搬运机械手控制系统的设计的硬件接线图和设计程序。
并进行了试验验证。
该设计合理规范并能实现搬运机械手控制系统的控制要求。
标签:S7-300PLC 步进电机伺服电机FX2N-1PG模块细分定位脉冲搬运机械手控制系统主要由日本三菱公司的FX2N系列PLC的特殊功能模块FX2N-1PG、步进驱动器、步进电动机和气动控制系统实现运行控制,具有抓取、放松、上升、下降和180°回旋功能,并能沿丝杆导轨做左右水平移动,同时配合伺服驱动器、、伺服电机将成品物料送到指定仓库各站点。
控制系统示意图:一、用PLC控制搬运系统的设计原理搬运机械手系统运用日本三菱公司的FX2N系列PLC对机械手进行一系列的控制,最终目的是把物料准确的送入指定仓库。
要实现准确定位主要涉及到FX2N-1PG模块的定位功能,步进驱动、步进电机和伺服驱动、伺服电机的动作原理。
1.定位脉冲输出模块FX2N-1PGFX2N-1PG定位脉冲输出模块,可输出一相脉冲数、频率可变的定位脉冲(最大100KHz,脉冲量32位),通过连接伺服电机或步进电机驱动器能实现独立1轴的简单定位控制。
首先了解PLC与1PG的体系结构关系。
FX2N-1PG是独立于PLC主机外的扩充模块,以数据总线连接。
模块依据安装位置先后自动设为K0~K7编号地址,所以必须有特殊的PLC数据写入指令,再配合时序及逻辑控制写入FX2N-1PG 寄存器内。
2.用PLC作上位机控制步进电机动作设计原理搬运机械手的定位控制可由PLC、步进驱动和步进电动机实现运行控制。
机械手运行过程为:回原点——定位运行——返回停止。
在机械手运行进程中,若碰到相应方向的极限开关时,机械手立即停止。
课程设计_PLC搬运物品机械手控制设计
课程设计_PLC搬运物品机械手控制设计PLC(Programmable Logic Controller)搬运物品机械手控制设计是一门工业自动化领域的课程。
在制造业中,物品搬运常常是非常繁琐的工作,因此机械手的出现给了制造业带来极大的便利。
机械手需要通过PLC来进行控制,通过对PLC程序的编程,可以让机械手对物品进行精准搬运。
本文将介绍PLC搬运物品机械手控制设计的相关知识和实践操作。
一、搬运物品机械手控制设计的基本知识1. PLC的基本概念PLC(Programmable Logic Controller)即可编程控制器,是一种专门用于控制工业生产过程的计算机硬件,也是一种特殊的计算机控制系统。
PLC控制器主要由中央处理器(CPU)、输入/输出模块(I/O)、电源部分和编程器四个部分组成。
PLC控制器的任务是将输入设备的信号转换为控制信号去驱动输出设备,从而实现控制过程。
2. 机械手的基本概念机械手(Robotic Arm)是一种可以代替人手进行工业生产操作的机器人。
它主要由机械臂、控制器、传感器、执行器等多个部件组成。
机械手在工业生产中可以起到非常重要的作用,在电子、汽车、食品等工业领域都有广泛应用。
3. 搬运物品机械手的基本工作原理搬运物品机械手的基本工作原理是通过控制机械手的关节转动和末端执行器的运动来实现物品的搬运。
在实际应用中,机械手需要进行复杂的运动规划,通过PLC对机械手进行精准的控制,可以实现对物品的精准搬运。
二、PLC搬运物品机械手控制设计的实践操作在PLC搬运物品机械手控制设计的实践操作中,我们需要通过PLC编程来实现搬运物品机械手的自动化控制。
1. 确定控制策略在控制机械手的过程中,需要明确控制策略,比如机械手的运动轨迹、动作的先后顺序、运动速度等。
在PLC编程中,可以通过编写具体的程序来实现控制的策略。
2. 设计PLC程序在PLC编程之前,我们需要根据机械手控制的策略来设计PLC程序。
基于PLC的搬运机械手控制系统设计

基于PLC的搬运机械手控制系统设计PLC(可编程逻辑控制器)是一种广泛应用于自动化领域中的控制设备,它拥有可编程的逻辑控制功能,具有高精度、高可靠性、动态稳定性好等特点。
在制造业中,搬运机械手广泛应用于对生产线上产品的搬运,包装和装载等操作。
基于PLC 的搬运机械手控制系统就是将PLC作为核心控制器,实现对搬运机械手的控制和调节,从而提高其工作效率和精度。
搬运机械手控制系统设计基于PLC的搬运机械手控制系统的设计由以下几个部分组成:1. 机械结构设计:机械结构是搬运机械手控制系统的基本构成部分,包括机械臂、传动机构和夹持机构等。
机械结构的设计需要考虑机械臂的长度、强度、重量、运动速度和角度等参数。
传动机构包括电机、减速器、传动轮等,其作用是将电机转换为机械臂的运动。
夹持机构用于夹持待处理的物品,实现搬运和装载等操作。
2. 电气设计:电气设计包括控制系统的电源、控制器、传感器和执行器等。
控制系统的电源是供电保障,必须保证输入电压稳定。
控制器根据输入信号实现对机械手的控制,包括控制信号的生成、控制程序的调试和PID调节等。
传感器用于实时获取机械手的位置、状态和运动方向等信息。
执行器执行机械手的运动和夹持等功能。
3. 软件设计:PLC控制器是基于程序的工作,程序的编写需要考虑搬运机械手的不同工作场景和判据,以实现自动化控制。
软件设计主要包括程序设计和逻辑控制等。
程序设计是根据搬运机械手的功能和运动方式编写程序,以实现对机械手的控制、调节和监测。
逻辑控制是根据具体工作场景进行逻辑判断,实现机械手的自动化控制动作。
基于PLC的搬运机械手控制系统的特点基于PLC的搬运机械手控制系统在制造业中得到广泛应用,其具有以下特点:1. 稳定性好:PLC控制器控制器稳定性好,能够长时间连续工作,不易出现故障。
2. 精度高:PLC控制器具有高精度的控制能力,能够控制搬运机械手的精度和速度,以及对物品的判别和定位等。
3. 可编程性强:PLC控制器采用可编程的逻辑控制,能够为不同的工作场景编写程序,实现自动化控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
【6】 第37卷 第2期 2015-02(下)基于PLC 控制的变速器搬运机械手系统设计System design of handling mechanical hand of transmission based on PLC control宣自洋1,2,陈书宏1,常 凯1XUAN Zi-yang 1,2, CHEN Shu-hong 1, CHANG Kai 1(1.中国科学院沈阳自动化研究所,沈阳 110016;2.中国科学院大学,北京 100049)摘 要:文章中介绍了一种变速器自动搬运机械手,机械手基于PlC控制,通过2套伺服驱动单元实现了机械手的水平和竖直方向运动,通过4套气动控制单元实现了机械手的夹紧、旋转、翻转和姿态调整动作,通过触摸屏提供了良好的信息与操作交互,利用PROFIBUS-DP现场总线建立了机械手系统与主装配线系统和试验线系统间的通信。
该机械手的成功应用,提高了生产的自动化程度和效率,降低了人力成本,进而提高了产品的市场竞争力。
关键词:搬运机械手;PlC;系统设计中图分类号:TP23 文献标识码:B 文章编号:1009-0134(2015)02(下)-0006-03Doi:10.3969/j.issn.1009-0134.2015.02(下).03收稿日期:2014-10-23作者简介:宣自洋(1988 -),男,安徽六安人,硕士研究生,研究方向为工业自动化控制。
0 引言变速器自动化装配线主要由主装配线和试验环线组成,由于两种线体的结构特性以及变速器的在线姿态等差异,往往无法实现两条线体的直接连接,因此需要将主装配线装配完成的变速器搬运到试验线上进行性能检测。
目前多数变速器生产厂家采用人工吊装的方式搬运变速器,不仅效率低,影响自动化装配线的整体效果,而且增加了额外的人力成本,导致产品成本的增加。
在此介绍一种自动搬运机械手,由PLC 进行控制,由伺服驱动单元和气动控制单元实现机械手的各项运动,由触摸屏提供人机交互。
该自动搬运机械手已成功应用于国内某知名汽车生产商的生产现场,实现了变速器抓取、搬运、放置等动作的全自动化,提高了生产效率,降低了运营成本。
1 变速器搬运机械手总体结构变速器搬运机械手总体结构如图1所示。
机械手总体采用龙门式架构,跨越主装配线和试验线,机械手的运动部分安装固定于龙门横梁上的溜板上。
机械手X 轴位于龙门框架的水平方向,Y 轴则位于龙门框架的竖直方向,机械手X 轴和Y 轴上分别有一个伺服电机,伺服电机都安装固定在溜板上。
机械手的底部是机械手的夹爪部分,机械手抓取变速器时需要将变速器夹紧,因此在夹爪的一侧配有夹紧气缸。
由于变速器在主装配线和试验线上放置的姿态不同,为了能顺利完成变速器搬运任务,需要在机械手搬运过程中对变速器进行必要的姿态变换,因此机械手结构上设有翻转机构和姿态调整机构以实现变速器的姿态变换,翻转机构与夹爪连接在一起,并配有一个翻转气缸,可驱动夹爪绕中心线正反向旋转90o 角,进而可以使变速器翻转90o 角,姿态调整机构与夹爪的安装板连接,有一个姿态调整气缸,对动底部整个装置绕一个轴线旋转一定的角度,对变速器的姿态进行微调。
机械手抓取主装配线变速器时,夹爪开口沿X 方向,放置变速器到试验线上时,夹爪开口则需要沿Z 方向,成功搬运变速器需要旋转机械手底部的夹持装置来改变夹爪的朝向,旋转机构位于竖直立柱上,配有一个旋转气缸,旋转气缸通过连接机构带动竖直立柱下的整个装置绕竖直轴线正反向旋转90o 角,从而改变了夹爪的朝向,满足了机械手对变速器的搬运需求。
1234598671.Y 轴电机;2.Y 轴导轨;3.X 轴电机;4.X 轴导轨;5.姿态调整电机;6.夹紧气缸;7.夹爪;8.翻转气缸;9.旋转气缸图1 变速器搬运机械手结构示意图2 变速器搬运机械手工作原理变速器搬运的整个过程都是全自动运行,无需人工干预。
整体系统无故障的情况下,主装配线变速器到位准备就绪后,通知机械手取箱,机械手成功抓取变速器后通知主装配线取箱完成,机械手搬运变速器到试验线,过程中完成旋转、翻转和姿态调整动作,机械手到达试验线上方后,若试验线已经准备好一个空托盘,则第37卷 第2期 2015-02(下) 【7】发讯通知机械手可以放箱,若试验线还没有准备好,机械手就在试验线上方等待放箱,机械手放箱完成后通知试验线放箱完成,随后机械手返回并恢复取箱姿态准备下一次取箱任务。
变速器搬运机械手基本流程如图2所示。
3 变速器搬运机械手气动原理机械手的夹紧、翻转、旋转以及姿态调整功能都是通过相应的气缸完成,气缸的动作由相应的电磁阀控制,而电磁阀的控制信号则由PLC 给定。
图3为变速器搬运机械手的气动原理图,旋转气缸和翻转气缸为90o 摆动气缸,夹紧气缸和姿态调整气缸为单活塞杆标准型气缸,4个二位五通电磁阀控制各气缸的动作。
各气缸的进出气口都连接有可调节的单向节流阀,起到节流和控制气流方向的作用,其中姿态调整气缸的和夹紧气缸的P2口连接有可控单向阀,控制气源来自P1口回路,可实现保压的功能。
㿞䓋㡙ⶸⳎ䓋㡙ⶸケ㆕㡙ⶸ䓬㲍⮘䎜㡙ⶸ图3变速器搬运机械手气动原理图4 变速器搬运机械手电控系统4.1 电气控制系统硬件设计变速器搬运机械手电气控制系统的硬件主要包括PLC 、HMI 触摸屏、伺服驱动单元、气动控制单元和通信模块等,控制系统硬件结构如图4所示。
䑘䓑㞅㼀㻖㵔⪆㘟㠢;䑂㤞Ⱀ⭆䊋<䑂㤞Ⱀ⭆䊋ケ㆕㡙ⶸ䓬㲍⮘䎜㡙ⶸ㿞䓋㡙ⶸⳎ䓋㡙ⶸ3URILEXV '3䓽㼀&38 ;3(0,㬵䂊㼀㻖㵔图4 变速器搬运机械手电气控制系统硬件结构图电气控制系统中采用西门子S7-200 CPU 224XP 型PLC ,该型号PLC 是S7-200系列功能增强型CPU ,本机集成14个输入/10个输出共24个数字量I/O ,2个输入/1个输出共3个模拟量I/O ,由于系统I/O 点数较多,故又扩展了24个输入/24个输出共48个数字量I/O 。
PLC 本机上有2个RS-485通信接口,其中一个用作计算机的编程接口,另一个作为与HMI 触摸屏建立串口通信。
PLC 本机上有2个100KHz 的高速脉冲输出和6个独立的100KHz 的高速计数器,2个100KHz 的高速脉冲输出用于输出PWM 脉冲信号控制伺服驱动单元,选取2个100KHz 的高速计数器用于电机编码器计数,进而计算电机转速,驱动单元的状态和报警信号都是通过PLC 的I 输入点传送到PLC 中的。
机械手PLC 系统通过PROFIBUS-DP 现场总线通信扩展模块EM 277将机械手控制系统与主装配线PLC 系统和试验线PLC 系统上的PROFIBUS-DP 总线连接在一起,组成统一的PROFIBUS-DP 通信网络,实现了相互之间的通信。
PLC 通过I/O 信号给定控制电磁阀,进而控制气缸的动作。
HMI 触摸屏采用台达触摸屏,PLC 通过RS-485串口通信将机械手系统状态和控制信息传送到触摸屏中,通过触摸屏可以直观的查看机械手的相关工作状态,并可以在触摸屏中设置相关的机械手的操作命令按钮,操作人员通过操作触摸屏就可以将操作命令传送到PLC 中,从而控制机械手的动作。
HMI 为用户和系统提供了良好的交互,使操作人员能直观的操作和监测内部系统。
伺服控制器采用安川伺服驱动器,通过配套的驱动电缆连接到配套的伺服电机。
机械手控制系统中共配有两组伺服系统,分别配置在X 水平轴和Y竖直轴上,在图2变速器搬运机械手基本工作流程图【8】 第37卷 第2期 2015-02(下)每个轴的两端设置限位开关,以防止行程超限,同时安装零位开关,为X 轴和Y 轴的移动提供零点基准。
伺服的控制模式为位置控制模式,控制中利用了伺服控制器中的电子齿轮功能,进而提高了位置控制的精度。
4.2 控制系统软件设计变速器搬运机械手控制系统软件设计包括两大部分:PLC 程序设计和HMI 程序设计。
4.2.1 PLC 程序设计PLC 程序按控制方式又可分为两类:手动控制程序和自动控制程序。
手动控制程序主要用于安装调试以及后期的维护工作,其操作指令主要来自触摸屏上的按钮和操作按钮,机械手的各种动作在安全模式下可单步独立执行。
自动控制程序可以控制搬运机械手自动完成变速器跨线搬运任务,程序根据外部采集的各种信息,按一定的顺序执行任务,并在系统发生一定的异常情况时,发出报警信号和执行相应的安全保护措施,机械手的运行状态信息会实时的上传到触摸屏上显示,变速器搬运机械手自动控制程序流程图如图5所示。
图5变速器搬运机械手自动控制程序流程图4.2.2 HMI程序设计图6 状态显示及手动气缸操作画面人机界面程序由多个画面组成,可分为主画面、状态显示及手动气缸操作画面、水平轴和垂直轴操作画面。
其中状态显示及手动气缸操作画面如图6所示。
主画面显示机械手自动控制过程中的各个流程的状态,便于监测机械手自动运行中的实时状态。
状态显示及手动气缸操作画面提供了机械手各执行气缸的手动操作按钮,以及机械手运行状态的显示,通过该画面可以手动控制各执行气缸的动作和观察机械手的状态。
水平轴和垂直轴操作画面设置了X 轴、Y 轴的各种手动操作项,以及X 轴、Y 轴各项状态的显示,可以方便的通过该画面控制机械手在水平和竖直方向上的运动。
5 结束语本文介绍的变速器搬运机械手采用PLC 进行控制,很好的适应了工厂的复杂电气环境,配合伺服与气动控制,系统结构简单灵活,通用性强,抗干扰能力强,可靠性高,系统稳定性好。
目前该套搬运机械手已在生产现场安全运行一年多,成功搬运变速器数十万台,提高了变速器装配生产线的自动化程度和生产效率,大大降低了运营的人力成本,从而降低了产品的出厂成本,提升了产品的市场竞争力,为企业创造了很好的经济效益。
参考文献:[1] 于殿勇,刘兴义.基于PLC 与触摸屏控制的搬运机械手的应用[J].制造业自动化,2009,31(8):121-123.[2] 李军,付永领,裴忠才,等.钢材捆扎机械手的理论分析与设计[J].机器人,2003,25(4):349-352.[3] 罗庚兴,宁玉珊.气动安装机械手的PLC 控制[J].制造业自动化,2011,33(1):82-84.[4] 胡敏.深入浅出西门子S7-200 PLC[M].北京:北京航空航天大学出版社,2007.[5] 中达电通股份有限公司.D O P -B 系列人机界面使用手册[K],2010.[6] 安川株式会社.Σ-V 系列AC 伺服驱动器用户手册[K].2009.基于PLC控制的变速器搬运机械手系统设计作者:宣自洋, 陈书宏, 常凯, XUAN Zi-yang, CHEN Shu-hong, CHANG Kai作者单位:宣自洋,XUAN Zi-yang(中国科学院沈阳自动化研究所,沈阳110016; 中国科学院大学,北京100049), 陈书宏,常凯,CHEN Shu-hong,CHANG Kai(中国科学院沈阳自动化研究所,沈阳,110016)刊名:制造业自动化英文刊名:Manufacturing Automation年,卷(期):2015(4)引用本文格式:宣自洋.陈书宏.常凯.XUAN Zi-yang.CHEN Shu-hong.CHANG Kai基于PLC控制的变速器搬运机械手系统设计[期刊论文]-制造业自动化 2015(4)。