二维数值仿真软件MEDICI概述
TCAD选择Medici、ISE、Silvaco还是Sentaurus

TCAD选择Medici、ISE、Silvaco还是Sentaurus可选TCAD软件(TCAD-Technology Computer Aided Design)a.Tsuprem4/Medici(Avanti,被Synopsys收购)b.Silvaco TCAD(Silvaco公司)c.ISE TCAD(瑞士ISE公司,被Synopsys收购)d.Sentaurus TCAD(Synopsys)Tsuprem4/MediciTsuprem4/Medici是Avanti公司的二维工艺、器件仿真集成软件包。
Tsuprem4是对应的工艺仿真软件,Medici是器件仿真软件。
在实践中,可以将Tsuprem4的工艺仿真的结果导入到Medici中,从而进行较为精确的仿真。
功能和操作都不及ISE TCAD、Slivaco TCAD和Sentaurus TCAD,但对使用习惯了的用户一般还是会选择最经典的这两个软件。
Silvaco TCADSilvaco TCAD提供了工艺模拟和器件模拟;Athena是一套通用的、具有标准组件以及可拓展性的一维和二维制程模拟器,可用于Si 或其它材料的工艺开发。
Athena由四套主要的工具组成:SSuprem4用于模拟Si工艺的implantation, diffusion, oxidation and silicidation ;Flash用于模拟先进材料工艺的implantation, activation and diffusion;Optolith 用于lithography模拟;Elite用于topography模拟。
Athena还提供了硅化物建模和ion implantation, etching 和deposition的Monte Carlo建模方法。
Atlas是一套通用的、具有标准组件以及可拓展性的一维和二维器件模拟器。
Atlas适用所有的半导体工艺器件模拟,包括两个主要的模拟器:S-Pisces用于Si器件模拟; Blaz模拟先进材料构成的器件和复杂的构造。
工艺仿真软件

半导体器件工艺仿真软件选择ISE TCAD还是MEDICI,Tsuprem42009年04月11日星期六 12:40在介绍ISE TCAD,MEDICI,Tsuprem4之前先介绍Sentaurus吧,介绍完Sentaurus,也许就不需要再介绍ISE TCAD和MEDICI,Tsuprem4了。
Sentaurus Process介绍Synopsys Inc.的Sentaurus Process 整合了:⑴Avanti 公司的TSUPREM系列工艺级仿真工具(Tsupremⅰ,Tsupremⅱ,Tsupremⅲ只能进行一维仿真,到了第四代的商业版Tsuprem4能够完成二维模拟);⑵Avanti公司的Taurus Process 系列工艺级仿真工具;⑶ISE Integrated Systems Engineering公司的ISE TCAD工艺级仿真工具Dios(二维工艺仿真)FLOOPS-ISE(三维工艺仿真)Ligament(工艺流程编辑)系列工具,将一维、二维和三维仿真集成于同一平台。
在保留传统工艺级仿真工具卡与命令行运行模式的基础上,又作了诸多重大改进:⑴增加、设置了模型参数数据库浏览器(PDB),为用户提供修改模型参数及增加模型的方便途径;⑵增加、设置了一维模拟结果输出工具(Inspect)和二维、三维模拟结果输出工具(Tecplot SV)。
Inspect 提供了一维模拟结果的交互调阅。
而Tecplot SV 则实现了仿真曲线、曲面及三维等输出结果的可视化输出。
(ISE TCAD的可视化工具Inspect和tecplot的继承)此外,Sentaurus Process 还收入了诸多近代小尺寸模型。
这些当代的小尺寸模型主要有:⑴高精度刻蚀模型及高精度淀积模型;⑵基于Crystal-TRIM 的蒙特卡罗(Monte Carlo)离子注入模型、离子注入校准模型、注入解析模型和注入损伤模型;⑶高精度小尺寸扩散迁移模型等。
迪迈软件概述

DIMINE 2010数字矿山软件系统是在中南大学古德生院士及王李管教授领导下、由中南大学数字矿山研究中心的矿业及软件专家们,在全面研究了国内外数字矿山相关软件和国内矿业企业实际需求的基础上,经过多年的艰苦努力,研究开发出的新一版基于数字化矿山整体解决方案的矿山数字化软件系统,达到了国际领先水平。
该系统主要适用于矿业企业的地质、测量、采矿专业的技术人员及技术管理人员,全面实现了从矿床三维地质建模、储量计算与动态管理、测量验收及数据的快速成图;地下矿开采系统设计与开采单体设计、回采爆破设计、生产计划编制、矿井通风系统网络解算与优化;露天矿开采境界优化、露天采场设计、采剥顺序优化与计划编制到各种工程图表的快速生成等工作的可视化、数字化与智能化,是各矿业企业进行数字化矿山建设最佳的软件平台。
目前,DIMINE数字矿山软件系统已成功应用在国内包括有色、黑色、黄金等不同类型的矿山企业、设计院及大专院校,用户包括:江西铜业集团、安徽铜陵矿业集团、云南玉溪矿业公司、中国铝业河南分公司、中核集团、云南金沙矿业公司、五矿集团邯邢冶金矿山管理局、新余钢铁集团、北京矿冶研究总院、兰州设计院、本钢设计院、中南大学、北京科技大学等,为企业带来的经济和社会效益正逐渐显现出来,同时也极大地改善和提高了地质工程师、测量工程师、采矿工程师及企业管理者们在生产管理过程中的技术信息交流水平和工作效率,进而提高了矿山企业的技术及生产管理水平。
DIMINE 2010版软件系统的主要特点如下:l 采用OFFICE2007及AUTOCAD2009的界面风格,组织更有条理,界面更友好;l 采用八叉树技术及硬盘虚拟内存技术,可以支持超大块段模型的建立及显示;同时采用先进的动态次级分块技术实现对矿体边界的最佳拟合;l 增加了露天采剥顺序优化和计划编制功能,自动确定露天矿的分期开采境界,实现了中长期和短期采剥计划的快速编制;基于生产过程模拟技术、增加了符合中国矿山实际的地下矿生产进度计划编制功能;l 独有的类AUTOCAD绘图技术,具有支持OLE对象插入及自动标注功能;l 国内外首次采用数据库技术管理矿山所有数据,提高了企业数据的共享程度和安全性,实现了多用户,全方位协同工作;l 国内外首次利用三维GIS技术,实现复杂属性信息和空间信息的逻辑表达式查询与处理;l 首次采用空间工作面方式提高了真三维环境下的开采设计的精度和效率;l 实现了三维矿业软件由几何建模到开采设计建模的跨越;l 支持单用户、多用户及数据库用户三种不同类型的用户使用。
工艺仿真软件Tsuprem4与器件仿真软件Medici的使用

2017/8/1
1/138
1、TCAD仿真工具介绍
一、工具简介
目前世界上有四套TCAD仿真工具:
Tsuprem4 / Medici Silvaco ( Athena / Atlas) ISE ( Dios / Mdraw / Dessis) Sentaurus(Process / Structure / Device)
TSUPREM4使用介绍
结构初始化
有两种形式: 1. 读入已有结构:
INITIALIZE IN.FILE=oldstr
2.建立新结构:
结构区间定义 INIT <100> impurity=boron i.conc=1E15
2017/8/1
5 / 68
6/138
2、Tsuprem4 命令语句分类
(1)文件及控制命令 (2)定义器件结构的命令 (3)工艺步骤命令(Tsuprem-4的核心) (4)输出命令
2017/8/1
7/138
1、COMMENT命令
用于注释。若注释有多行,下一行前要加“+”符号。
为方便起见,可用“$”符号代替。 例1:COMMENT this is a short comment 或 $ this is a short comment
Medici 和 Atlas 都包含器件构建工具和器件 仿真工具,在后两个软件中器件构建和器 件仿真被拆分成两个独立的工具。
2/138
2017/8/1
2、仿真方式
工艺仿真器件仿真
Tsuprem4Medici AthenaAtlas DiosMdrawDessis(或 MdrawDessis) ProcessStructureDevice(或 StructureDevice )
基于MEDICI的MOS晶体管器件模拟

Y, MES N:1I 0 0 5 H 一 . 2 Y. MES N: = H 3 L 0.
Yt 口rjin ( 0 1 , V L●
’图 lNMO 输 出特性 曲线图 S ( 转移特性 的模拟 2 ) 转移特性模拟的主要命令如下 ,转移特性 模拟结果得到的曲线图 如 图 2所 示 。
对相关专业基础理论知识 的理解 , 明确理 论知识在 实际中的应用方 向, 领悟基础 知识的重要性。 [ 关键词 ] E C 晶体 管 器件模拟 M DI I
1引 Байду номын сангаас .
I OAD N. LE= I FI MDEX1 S
S YMB C ARRI ERS 0 =
随着微 电子科学和半导体技术 的飞速发展 , 半导体 工艺不断改进 , 半导体器件 结构 和性能也不断提 升。T A C D工具 ( E II M DC 是其 中之一 ) 可以通过计算机仿真技 术对不同工艺进行模 拟 ,取代或部分取代昂贵 的工艺实验 ; 也可以对不同器件结构进行优化 , 获得理想特性 。ME C DII 是 Sn py 公司开发的一款工 艺和器件仿真 软件 ,它在半 导体器 件设 yo s s 计领域应用十分广泛, 主要用作器件和电路性能参数 的仿真 。 半导体物 理、 半导体器件等知识都是半 导体技术的重要基 础 , 比较理论化 , 但 难 于理解。 由于半导体设备 、 运行费用 的昂贵 , 校不可能具 备如企业 一 学 样 的半导体器件制作和性能测试 的条件 , 以本课题 也可作 为如何合 所 理解决微电子专业学生缺乏实际操作问题 的初探 。 2MEDCI . I 简介 M D C 是先驱(vn ) E II Aat i 公司的一个用 来进行二维器件仿真 的软件 。 用该软件可以对双极型半导体器 件进行仿真 ,这个程序通过解二极 管 和双极型三极管 以及和双载流子有关 的电流效应 的电流连续性方程 和 泊松方程来分析器件。’ 另外 , 还可以分析单载流子起主要作用 的器件 , 例如 MO F T J E ME F T 软件可 以被用来分析器件在瞬态情 况下 S E ,F T, S E 。 的变化 , 对亚 微米 、 深亚微米 的器件进 行仿真 , 像热载 流子和速度过 冲 等效应在 ME I I D C 中都可 以被考虑 , 能对它们 的影响进行分析。 并
半导体器件模拟仿真
athena - 考虑过程 必需对器件生成的外在条件、物理过程进行描述。
材料定义、
结构定义指令 athena之外的另一种可以生成器件信息的工具。
与devedit类似,用atlas器件仿真器语言编写器件信息。 与devedit不同的是需要编程操作,没有图形操作界面。
2. 熟悉并学会使用器件仿真软件 (1)学习如何用仿真语句编写器件的结构特征信息 (2)学习如何使用atlas器件仿真器进行电学特性仿真
3. 对半导体工艺仿真及器件仿真中所用到的模型加以了解
4*. 利用工艺器件仿真软件,培养和锻炼工艺流程设计和新器件 开发设计等方面的技能。
6. 半导体器件仿真的历史发展
仿真系统
*.str文件 指定工作条件下的 结构文件。包含器 件的载流子分布、 电势分布、电场分 布等信息。
输出端
指令的输入通过deckbuild 软件窗口传送至仿真器
*.log *.str等输出文件通过tonyplot软件窗口来查看 Atlas器件仿真部分
athena 工艺仿真器
Athena概述
用途:开发和优化半导体制造工艺流程。
电路模拟用器件模型参数
IC电路仿真
(IC Circuit Simulation)
3. 有什么用?
一方面,充分认识半导体物理学,半导体器件物理学等这些抽象 难懂的理论基础知识在半导体工业中的实际应用。加强理论教学 的效果。
仿真也可以部分取代了耗费成本的硅片实验,可以降低成本,缩 短了开发周期和提高成品率。也就是说,仿真可以虚拟生产并指 导实际生产。
功能: (1)勾画器件。 (2)生成网格。(修改网格) 既可以对用devedit画好的器件生成网格,或对athena工艺仿真生成含有网格信息的 器件进行网格修改。
半导体器件模拟仿真

2. 在整个学科中所处的位置是什么?
从纵向来讲,和其他CAD类或仿真类课程一样,它是基础理论知 识和实际生产的链接点。 从横向来讲, 电路模拟、工艺模拟、器件模拟之间的关系可以用下 面的结构图来表示
本门课程 重点学习部分
工艺仿真
(Process Simulation)
器件仿真
(Device Simulation)
一、概论:半导体仿真概述 Introduction of Semiconductor Simulation
1. 这门课是研究什么的?
(1)什么是仿真? 仿真和另外一个词汇建模(modeling)是密不可分的。 所谓建模就是用数学方式抽象地总结出客观事物发展的一般规律。 仿真是在这个一般规律的基础上,对某事物在特定条件下的行动 进行推演和预测。 因此可以说建模是仿真的基础,仿真是随着建模的发展而发展的。 建模和仿真的关系可以比作程序设计中算法和语言的关系。
3. 对半导体工艺仿真及器件仿真中所用到的模型加以了解 4*. 利用工艺器件仿真软件,培养和锻炼工艺流程设计和新器件 开发设计等方面的技能。
6. 半导体器件仿真的历史发展
1949年: 半导体器件模拟的概念起源于此年肖克莱(Shockley)发表的论文, 这篇文章奠定了结型二级管和晶体管的基础。但这是一种局部分 析方法,不能分析大注入情况以及集电结的扩展。 1964年: 古默尔(H.K.Gummel)首先用数值方法代替解析方法模拟了一维 双极晶体管,从而使半导体器件模拟向计算机化迈进。 1969年: D.P.Kennedy和R.R.O’Brien第一个用二维数值方法研究了JFET。 J.W.Slotboom用二维数值方法研究了晶体管的DC特性。 从此以后,大量文章报导了二维数值分析在不同情况和不同器件 中的应用。相应地也有各种成熟的模拟软件,如CADDET和 MINIMOS等。
二维数值仿真软件MEDICI概述
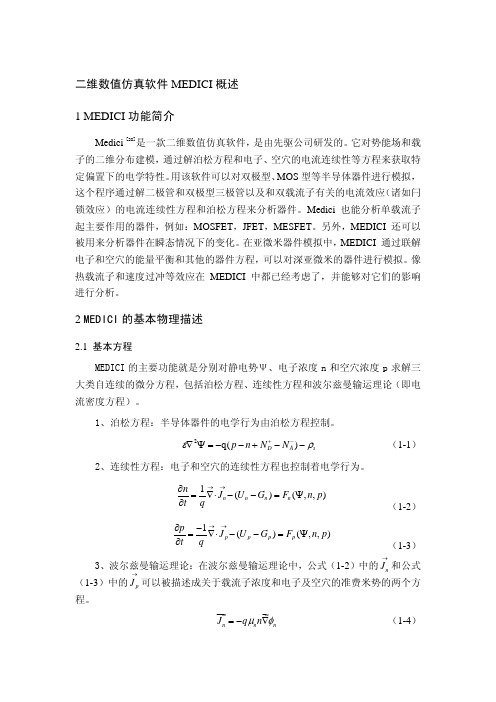
二维数值仿真软件MEDICI 概述1 MEDICI 功能简介Medici [28]是一款二维数值仿真软件,是由先驱公司研发的。
它对势能场和载子的二维分布建模,通过解泊松方程和电子、空穴的电流连续性等方程来获取特定偏置下的电学特性。
用该软件可以对双极型、MOS 型等半导体器件进行模拟,这个程序通过解二极管和双极型三极管以及和双载流子有关的电流效应(诸如闩锁效应)的电流连续性方程和泊松方程来分析器件。
Medici 也能分析单载流子起主要作用的器件,例如:MOSFET ,JFET ,MESFET 。
另外,MEDICI 还可以被用来分析器件在瞬态情况下的变化。
在亚微米器件模拟中,MEDICI 通过联解电子和空穴的能量平衡和其他的器件方程,可以对深亚微米的器件进行模拟。
像热载流子和速度过冲等效应在MEDICI 中都已经考虑了,并能够对它们的影响进行分析。
2 MEDICI 的基本物理描述2.1 基本方程MEDICI 的主要功能就是分别对静电势Ψ、电子浓度n 和空穴浓度p 求解三大类自连续的微分方程,包括泊松方程、连续性方程和波尔兹曼输运理论(即电流密度方程)。
1、 泊松方程:半导体器件的电学行为由泊松方程控制。
2q()D A s p n N N ερ+−∇Ψ=−−+−− (1-1)2、连续性方程:电子和空穴的连续性方程也控制着电学行为。
(1-2) (1-3) 3、波尔兹曼输运理论:在波尔兹曼输运理论中,公式(1-2)中的n J →和公式(1-3)中的p J →可以被描述成关于载流子浓度和电子及空穴的准费米势的两个方程。
n n n J q n µφ=−∇ (1-4)1()(,,)n n n n nJ U G F n p tq →→∂=∇⋅−−=Ψ∂1()(,,)p p p p pJ U G F n p tq →→∂−=∇⋅−−=Ψ∂p p p J q n µφ=−∇ (1-5)同样,n J 和p J 可以被写成关于Ψ、n 和p 的方程式,由漂移电流和扩散电流两部分组成。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
二维数值仿真软件MEDICI 概述1 MEDICI 功能简介Medici [28]是一款二维数值仿真软件,是由先驱公司研发的。
它对势能场和载子的二维分布建模,通过解泊松方程和电子、空穴的电流连续性等方程来获取特定偏置下的电学特性。
用该软件可以对双极型、MOS 型等半导体器件进行模拟,这个程序通过解二极管和双极型三极管以及和双载流子有关的电流效应(诸如闩锁效应)的电流连续性方程和泊松方程来分析器件。
Medici 也能分析单载流子起主要作用的器件,例如:MOSFET ,JFET ,MESFET 。
另外,MEDICI 还可以被用来分析器件在瞬态情况下的变化。
在亚微米器件模拟中,MEDICI 通过联解电子和空穴的能量平衡和其他的器件方程,可以对深亚微米的器件进行模拟。
像热载流子和速度过冲等效应在MEDICI 中都已经考虑了,并能够对它们的影响进行分析。
2 MEDICI 的基本物理描述2.1 基本方程MEDICI 的主要功能就是分别对静电势Ψ、电子浓度n 和空穴浓度p 求解三大类自连续的微分方程,包括泊松方程、连续性方程和波尔兹曼输运理论(即电流密度方程)。
1、 泊松方程:半导体器件的电学行为由泊松方程控制。
2q()D A s p n N N ερ+−∇Ψ=−−+−− (1-1)2、连续性方程:电子和空穴的连续性方程也控制着电学行为。
(1-2) (1-3) 3、波尔兹曼输运理论:在波尔兹曼输运理论中,公式(1-2)中的n J →和公式(1-3)中的p J →可以被描述成关于载流子浓度和电子及空穴的准费米势的两个方程。
n n n J q n µφ=−∇ (1-4)1()(,,)n n n n nJ U G F n p tq →→∂=∇⋅−−=Ψ∂1()(,,)p p p p pJ U G F n p tq →→∂−=∇⋅−−=Ψ∂p p p J q n µφ=−∇ (1-5)同样,n J 和p J 可以被写成关于Ψ、n 和p 的方程式,由漂移电流和扩散电流两部分组成。
n n n n J q E n qD n µ=+∇ (1-6)p p p p J q E p qD p µ=−∇ (1-7)其中,n µ和p µ分别是电子和空穴的迁移率,n D 和p D 是电子和空穴的扩散系数,假设服从波尔兹曼载流子统计规律并忽略能带变窄效应带来的影响。
2.2 三种基本的复合方式现在MEDICI 支持求解以下三种体内复合,分别是间接复合(也叫肖特基-里德-霍尔复合,即SRH 复合),俄歇复合和直接复合(也称为带到带复合或者光学复合),公式(1-2)和(1-3)中的U n 和U p 代表电子和空穴的复合率,其为正值时,代表载流子复合,为负值时则代表载流子产生。
则:n p SRH Auger dir U U U U U U ===++ (1-8) 其中:2[exp()][exp()]i SRH p i n i pn n U ETRAP ETRAP n n p n kT kT ττ−=−+++ (1-9) 2.()dir i U C DIRECT np n =− (1-10)2222()()Auger i i U AUGN pn nn AUGP np pn =−+− (1-11)上述公式中,i n 代表本征载流子浓度,n τ和p τ代表电子和空穴寿命,并可能和浓度相关,参数ETRAP 代表陷阱能级E t 和本征费米能级E i 之差,AUGN 和AUGP 为与材料相关的特定常数。
MATERIAL 语句可以修改ETRAP ,AUGN ,AUGP 和C.DIRECT 的值。
2.3 其它物理描述除以上的基本方程及三种基本复合方式之外,MEDICI 还支持以下物理描述,包括:与浓度相关的寿命、与晶格温度相关的寿命、复合导致的隧穿、肖特基势垒隧穿、波尔兹曼统计、禁带与有效态密度、重掺杂导致的禁带变窄、应力导致的禁带变化、费米-狄拉克统计、杂质不完全离化、低温模拟、MOSFET 反型层中的量子效应、修正的局部密度近似量子模型等,相关内容可参考MEDICI 手册。
2.4 MEDICI 编程中的关键MEDICI 编程(以跑反向耐压为例)主要包括了定义变量、网格描述、结构及材料描述、杂质分布描述、求解所用的模型、方法及特定技巧、求解条件的设定等部分组成。
其中,结构及材料描述、杂质分布描述、求解条件的设定等部分是由器件本身决定的,变量定义是个人喜好的问题,这几个部分的编程是相对比较简单的。
网格描述是编程的重点,这决定了程序的运行效率。
在求解的模型、方法、技巧乃至求解条件都一样的前提下,一套好的网格可以在不影响结果精度的前提下大大缩短程序运行的时间,并且提高程序的收敛性。
求解所用的模型、方法及技巧的选择是编程的难点,这直接影响程序的可靠性,在不同的情况下,对模型的选择不仅必然影响结果的可靠性,而且会严重影响到程序的收敛性。
以下我们将对网格描述及模型取舍作进一步的讨论。
2.4.1 网格描述三个基本注意点首先,格点数目p N 对仿真时间有直接影响,求解一次的算法步骤正比于p N α,α的取值通常在1.5~2之间变化。
因此,格点增加,运算时间大幅度增加。
其次,器件的各个区域的电学行为不一致,所以需要在某些区域使用较密的网格,有些区域则只需要很疏的网格。
再次,对小器件几何结构的精确描绘非常重要。
为了能够正确地模拟载流子的运动,网格必须根据器件结构的大小进行适当地调整,这一考虑将随着器件的小型化和非平面化而显得越来越重要。
初始网格定义横向网格定义:MEDICI 定义网格是从器件的左边开始的。
横向网格定义由一个或多个X.MESH 来决定,每个X.MESH 语句定义一个横向网格片段,如果只有一个X..MESH 则涵盖整个器件的横向距离。
可以由WIDTH 参数开始一段定义,比如:X.MESH WIDTH=20,即定义片段初始位置到其后20µm 长的一段网格,然后定义网格间距;也可以在定义完网格间距之后,在语句的最后加上LOCATION 参数或者X.MAX 参数,与WIDTH 参数不同之处在于,LOCATION 和X.MAX 都是定义的绝对坐标,假设我们的片段从X=0的位置开始,则以上三个参数的值对同一网格片段是一致的,可是如果从X=5的位置开始定义20µm 长的一个网格片段,则LOCATION=25,X.MAX=25,而WIDTH=20,这是需要着重注意的地方。
另外LOCATION 和X.MAX 只需二者取一,而不是同时使用,因为两者的意义是一样的,当使用X.MAX 时,需添加X.MIN 语句定义网格片段的初始位置(不写则默认初始位置为0),而LOCATION 参数是不用写的。
纵向网格定义:纵向网格的定义是器件的最上方开始的。
纵向网格定义由一个或多个Y.MESH来决定。
每个Y.MESH语句定义一个纵向网格片段,如果只有一个则涵盖整个器件的纵向距离。
可以由DEPTH参数开始一段定义,使用方法同WIDTH,然后定义网格间距。
或者在定义完网格间距之后使用LOCATION 或者Y.MAX,基本使用方法也同横向定义中的LOCATION和X.MAX。
使用Y.MAX时,需要添加Y.MIN来说明初始位置,不写则默认初始位置为Y=0。
注意点:在MEDICI中,横向位置从X=0开始,可是纵向位置却可以是负值。
当Y的坐标为负值时,不能使用DEPTH语句,而只能用LOCATION或者Y.MAX来定义网格!定义网格间距的参数定义网格间距可以由以下几个参数来决定:H1,H2,H3,N.SPACES,NODE,RATIO,以及两个额外的参数,SPACING和MIN.SPAC。
以下对这些参数进行分别说明。
H1:从网格片段的初始位置开始定义间距,H1为间距值。
例如:X.MESH WIDTH=20 H1=1,这个语句的意义即为,从某个横向网格片段初始位置开始的20µm长度里,每隔1µm画一条网格线。
H2:从网格片段的结束位置开始定义间距,H2为间距值。
例如:X.MESH WIDTH=20 H2=1,这个语句的意义即为,从某个横向网格片段结束位置开始倒数20µm长度里(也就是这个网格片段),每隔1µm画一条网格线。
H1和H2可以组合使用,这样就可以形成渐变网格间距。
例如:X.MESH WIDTH=20 H1=1 H2=2,这个语句的意义即为,某个20µm长横向网格片段,第一条网格线距离初始位置间距为1µm,最后一条网格线距离结束位置间距为2µm,中间的网格线分布MEDICI会自动生成,不需要编程人员考虑。
之所以需要写渐变网格,就是因为对于某些器件来说,并不是所有定义的区域都是重要的区域,因此只需要比较少的网格即可。
H3:定义网格片段最中间位置的最大网格间距,可以与H1和H2共同使用,也可以只与H1或者H2搭配使用。
例如:X.MESH WIDTH=20 H1=1 H2=2 H3=3,这个语句的意义为,从某个横向网格片段的初始位置开始,第一网格线距离初始位置为1µm,最后一条网格线距离结束位置为2µm,最中间位置左右两条网格线距离中线为3µm,即网格从1µm渐变到3µm,再渐变到2µm。
具体的使用方法可在编程中自行试验。
N.SPACES:网格间距的数目,也即网格线的数目,只能定义均匀网格。
例如:X.MESH WIDTH=20 N.SPACES=20,其意义和X.MESH WIDTH=20 H1=1是完全一致的,不再赘述。
NODE:网格片段结束时的节点数目,和前一段节点数相减即得出本段网格片段的网格线数目,也只能定义均匀网格。
例如:X.MESH WIDTH=10 NODE=10,X.MESH WIDTH=20 NODE=30,这两个语句定义了WIDTH=20这个片段有20条均匀网格线,和上一例的定义没有区别。
RATIO:同一片段中相邻网格间距的比例值,可以控制网格的均匀渐变,使用较少,不做赘述。
SPACING:这个参数也是用来定义网格片段的间距,用途类似于H1和H2的组合,可以定义均匀也可以渐变,但使用方法类似NODE,必须使用两个语句才能确定是否渐变,比如:X.MESH WIDTH=10 SPACING=1,X.MESH WIDTH=20 SPACING=2,这两个语句说明在WIDTH=20这个片段中网格从1µm 渐变到2µm,和X.MESH WIDTH=20 H1=1 H2=2的意义是一样的。
MIN.SPAC:这个参数定义片段中允许出现的最小网格间距,基本不用,不做赘述。