稳定裕度
稳定裕度
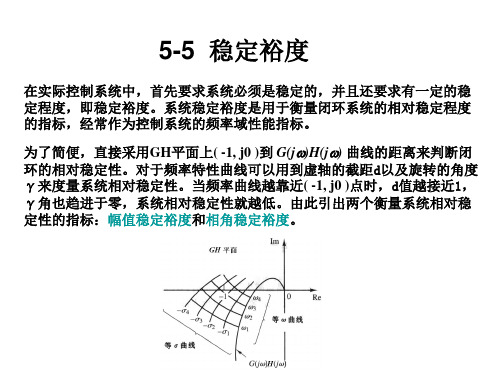
Nyquist稳定性判据是根据开环传递函数 G(jw)H(jw) 曲线是否包围GH平面 上的临界点( -1, 0 ) 判断闭环稳定性的。那末,能否根据函数 G(jw)H(jw) 曲 线离开( -1, 0 ) 判断闭环系统的相对稳定性呢?这就是本节的内容。 s 平面上的等 s 线和等 w 线在GH 平面上的映象见图。S 平面上,s = 0线 在 GH 平面的映象若穿过( -1, 0 ) ,意味着闭环有极点在虚轴上。若某–s 线穿过( -1, 0 ) 点,则意味着闭环有极点在–s 线上。用同样方法,也可以 解释等 w 线映象的意义。因此,GH平面上, ( -1, 0 ) 点在“映象网格”中 的位置就反映了闭环极点在s 平面上的位置,体现了其相对稳定性。 为了简便,实际中不进行等 s 线和等 w 线的网格映射,而直接采用GH平 面上( -1, 0 )到 G(jw)H(jw) 曲线的距离来判断闭环的相对稳定性。
习题5、 系统的开环传递函数为 KTT K G( s) H ( s) = , 1 2 1 s(T1s 1)(T2 s 1) T1 T2 试用乃奎斯特稳定判据判断系统的稳定性 K (T1 T2 ) G( jw) H ( jw) = 1 w 2 (T12 T22 ) w 4T12T22
)(1 j ) 0.01 5
w
) 0.1
w
w
20lg K 20lg 1 (
K 10 =1 100 1
1 2 1 2 1 ) 20lg 1 ( ) 20lg 1 ( ) 2 = 20lg1 0.1 0.01 5 10(1 10s) G ( s ) = K = 10 s(1 100s)(1 0.2s)
(3)幅值裕度在Bode 图中的等价表述
(自动控制原理)稳定裕度

2 干扰和噪声
外部干扰和噪声会降低系统的稳定裕度。
3 参数变化
系统参数的变化会对稳定裕度产生影响。
提高稳定裕度的方法和技巧
1
参数调整
通过调整系统参数来增加稳定器类型和参数来提高稳定裕度。
3
滤波器应用
通过滤波器来减少干扰和噪声对系统稳定裕度的影响。
结论和总结
稳定裕度是评估系统稳定性的重要指标,它能够确保系统在面对干扰和参数变化时保持稳定。了解稳定 裕度的定义、计算方法和影响因素,以及提高稳定裕度的方法和技巧,对于优化系统设计和提高系统可 靠性至关重要。
(自动控制原理)稳定裕度
稳定裕度是评估系统稳定性的重要指标。它衡量系统在面对干扰时的能力, 是确保系统可靠运行的关键。
定义稳定裕度
稳定裕度可以定义为系统离稳定界限的距离。它衡量了系统在存在不确定因素或参数变化时仍然保持稳 定的能力。
稳定裕度的公式和计算方法
稳定裕度公式
常见的稳定裕度公式是: 稳定裕度 = 1 / (1 + G(s))
计算方法
计算稳定裕度时,需要确定系统的传递函数, 并对其进行频率响应分析。
1. 确定幅值裕度和相位裕度的要求。 2. 绘制系统的频率响应曲线。 3. 根据要求的裕度计算稳定裕度。
稳定裕度的意义和重要性
1 系统可靠性
稳定裕度能够确保系统在面对干扰或参数变化时保持稳定性。
2 容错能力
稳定裕度增加系统的容错能力,即使出现不确定情况也能维持系统的稳定。
3 稳定边界
通过评估稳定裕度,可以确定系统的稳定边界,并提前采取措施来避免系统不稳定。
常见的稳定裕度指标
相位裕度 幅值裕度 增益裕度
系统响应相位与稳定边界相差的角度值。 系统响应幅值与稳定边界之间的比例关系。 系统传递函数增益与单位增益相差的值。
自动控制原理 第五章第八节稳定裕度
5.8 稳定裕度5.8 稳定裕度对一个最小相角系统而言,G(j w ) 曲线包围(-1, j0)点系统不稳定,不包围(-1, j0)点系统稳定,恰好经过(-1, j0) 点系统临界稳定。
G(j w ) 曲线越靠近(-1, j0)点,系统阶跃响应的振荡就越强烈,系统的相对稳定性就越差。
相角裕度和幅值裕度是系统开环频域指标,它们与系统的动态性能密切相关。
因此,可以用G(j w ) 曲线与(-1, j0)点的接近程度来表示系统的相对稳定性。
通常,这种接近程度以相角裕度和幅值裕度来表示。
的几何意义h ,γcω截止频率γ相角裕度()c =︒+∠180j G γw ()c =j 1G ωg ω相角交界频率h幅值裕度()g =1j h G w ()g ∠=−︒j 180G ω的物理意义h ,γ系统在方面的稳定储备量γh 幅值相角一般要求︒>40γ2>h相角裕度的物理意义:系统在相角上距离临界稳定还具有的储备量幅值裕度的物理意义:系统在增益上距离临界稳定还具有的储备量一般要求︒>40γ2>h)(180c j G w γ∠+︒=解法I :由幅相曲线求。
h ,γ例1)10)(2(100)110)(12(5)(++=++=s s s s s s s G ,求。
h ,γ(1)令()c =j 1G ω2222102100++=c c c w w w 242[104400]10000c c c w w w ++=9.2=c w 解得)9.2(180ϕ+︒=109.2arctan 29.2arctan 90180−−︒−︒=︒=︒−︒−︒=5.181.164.55905.8 稳定裕度(2) 令︒−=180)(g w ϕ10arctan 2arctan 90g g w w −−︒−=可得︒=+9010arctan 2arctan g g w w 47.4=g w )(1g j G h w =4.24167.01==例1)10)(2(100)110)(12(5)(++=++=s s s s s s s G ,求。
控制系统稳定裕度设计

控制系统稳定裕度设计控制系统的稳定性是系统工程中至关重要的一环。
稳定裕度是控制系统在面对外部扰动时能保持稳定的能力。
本文将讨论控制系统稳定裕度的概念、影响因素以及设计原则。
一、稳定裕度的概念稳定裕度是指控制系统在满足性能要求的同时,对于内外部扰动能够保持稳定的能力。
通常用裕度指标来描述系统的稳定性,例如相位裕度和增益裕度。
相位裕度是指系统的相位与临界相位的差值,增益裕度是指系统增益与临界增益的差值。
二、影响因素1. 系统动态特性:系统的动态特性直接影响稳定裕度。
例如,系统的阻尼比、谐振频率以及过冲量等参数都会对稳定裕度产生影响。
2. 控制器设计参数:控制器的设计参数会直接影响稳定裕度。
例如,比例系数和积分时间常数的选择都会对稳定裕度产生影响。
3. 系统外部扰动:外部扰动的大小和频率对系统的稳定性有直接影响。
稳定裕度设计需要考虑外部扰动的影响。
三、稳定裕度设计原则1. 设定合适的相位裕度:相位裕度是决定系统稳定性的重要指标。
通常,相位裕度应大于一定阈值,以确保系统不会产生不稳定的振荡。
2. 提高增益裕度:增益裕度是指系统增益与临界增益的差值,也是保证系统稳定性的关键因素。
增益裕度的提高可以通过合适的控制器设计参数以及系统结构的良好调整来实现。
3. 引入补偿网络:通过引入补偿网络可以改善系统的稳定裕度。
常用的补偿网络包括PID控制器、滤波器等。
4. 考虑外部扰动:稳定裕度设计需要充分考虑外部扰动对系统稳定性的影响。
可以采用滤波器、增加机械结构等手段来减小外部扰动的影响。
四、结论控制系统稳定裕度的设计是确保系统稳定性的关键步骤。
通过正确选择相位裕度和增益裕度,优化控制器设计参数以及考虑外部扰动的影响,可以提高系统的稳定性。
这将有助于系统的性能优化,提高工程的可靠性和稳定性。
在控制系统中,稳定裕度的合理设计对于保证系统稳定性和性能具有重要作用。
我们应该深入理解稳定裕度的概念、影响因素以及设计原则,并根据具体系统的特点和需求进行相应的设计和优化。
稳定裕度

m
(1 ij )
j
(1 T j )
闭环传递函数和频率特性可表示为:
GK ( s ) ( s) 1 GK ( s ) K (1 i s ) s
m i 1 j
(1 T s) K (1 s)
j 1 i 1 i m
n
|M(j|下降到
[0, b ]称为系统带宽。
2 M 0 时,对应的频率 b 称为带宽频率。频率范围 2
5.8 闭环系统性能分析
16
一、稳态性能指标分析:
如果通过频率特性曲线能确定系统的无差度阶数 v(即积分环节的个数) 和开环放大系数 K 的话,则可求得系统的稳态误差。(见3.6 稳态误差分析) 在波德图上,低频渐近线的斜率 和 的关系如下: 由 20 (dB / Dec),可求得 值; 也可由
|M(j|下降到
② 对典型欠阻尼二阶系统而言,性能指标与系统的特征参数有关。欠 阻尼二阶系统的特征参数是阻尼系数z 和无阻尼震荡频率。
tp 2 d n 1z
d%e
z
1z 2
100%
4 z ,当Δ 2时 n ts 3 ,当Δ 5时 z n
③ 对临界阻尼和过阻尼二阶系统而言,性能指标只有ts 。
60 40 20 0 -20 -40 -60 -80 -100 -120 -90 -120 -150 -180 -210 -240
10
K=30 K=3 K=0.3
-20dB/dec
当K=3,c=1.583, 23.3° 当K=30, -40dB/dec c=5.12, 16° -60dB/dec
20 0 -20 -40 -60 -80 -100 -120 -140 -90 -120 -150 -180 -210 -240 -270 0.01 0.1 1 10 100 1000
自动控制系统—— 第5章-4 稳定裕度

根据幅相曲线
R 2(N N ) 2
1
系统不稳定
j
4 10
0
16
【例5.4.2】 求如图所示二阶系统的相角裕度
R(s)
解:系统开环频率特性为
G( j)
n2
j( j 2n )
A()
n2
2
4
2 2 n
() 90 arctg 2 n
n2 s(s 2n )
C(s)
17
求截止频率 c A(c ) c
n2
1
c 2
4
2 2 n
c n 4 4 1 2 2
相位裕度为
180 (c ) 90
arctg
c 2 n
arctg
2 n c
arctg
2
4 4 1 2 2
18
【例5.4.3】 单位反馈系统的开环传递函数为
G(s)
K
s(s 1)(0.1s 1)
分别确定K=5和K=20时的相角裕度和增益裕度
解:开环频率特性为
G(
j)
K
(1 j)3
A()
K
(1
2
)
3 2
幅频,与K有关
() 3arctg 相频, 与K无关
12
1)由 (x ) 180 得 3arctgx 180
2)当K=4时
A(x )
4
3
(1 3)2
1 2
幅值裕度 h 1 2 A(x )
A(c )
4
(1
c
2
)
3 2
1
() 3arctg
解:绘制Bode图,根据图确定系统的相角裕度和 增益裕度
Exam5_4_3.m
飞机稳定裕度计算

飞机稳定裕度计算
飞机的稳定裕度通常以飞机的焦点到重心的距离占机翼平均空气动力弦长的百分比来表示,且焦点位于重心之后为正,反之为负。
早期,战斗机的纵向稳定裕度为正5%左右,运输机的纵向稳定裕度一般为正5%-10%。
飞机的纵向稳定性条件也适用于羽毛球、纸飞机、毽子等体育、娱乐用品。
除纵向稳定性外,飞机还有横向稳定性和方向稳定性问题,三者大体类似,不再逐一展开。
飞机的稳定裕度是一个重要的参数,它可以帮助设计者评估飞机的稳定性,并优化飞机的设计。
稳定裕度的讲解
180 G( jwc )
1 G( jw g )
相角交界频率ωg G( jωg ) 180
幅值 的物理意义 相角
h
系统在
幅值 一般要求
方面的稳定储备量
40 h 2
§5.5
例3 G ( s )
5
稳定裕度 (3)
自动控制原理
§5. 线性系统的频域分析与校正
§5.1 §5.2 §5.3 §5.4 §5.5 §5.6 §5.7 频率特性的基本概念 幅相频率特性(Nyquist图) 对数频率特性(Bode图) 频域稳定判据 稳定裕度 利用开环频率特性分析系统的性能 利用闭环频率特性分析系统的性能
自动控制原理
§5.5 稳定裕度
课程小结
稳定裕度的概念
稳定裕度的定义
(开环频率指标) 截止频率 ωc 相角裕度 穿越频率 幅值裕度 h
G( jωc ) 1
180 G( jwc )
ωg G( jωg ) 180
h 1 G( jw g )
稳定裕度的意义 稳定裕度计算方法
, h 的几何意义 , h 的物理意义
s s s( 1)( 1) 2 10 100 , s( s 2)( s 10 ) ,求
§5.5.2 稳定裕度的计算
h。
解法I:由幅相曲线求 , h。
§5.5
稳定裕度 (6)
解法II:由Bode图求 , h。
§5.5
6(
稳定裕度 (7)
例4
s 1) 2.5 ,求 , h。 G( s ) s s s s( 1)( 1)( 1) 2 5 12.5
L(w ) wc 180 (wc ) 1 (w ) 180 w g h G( jw g )
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
5.5 稳定裕度
5.5.1 稳定裕度的定义
控制系统稳定与否是绝对稳定性的概念。
而对一个稳定的系统而言,还有一个稳定的程度,即相对稳定性的概念。
相对稳定性与系统的动态性能指标有着密切的关系。
在设计一个控制系统时,不仅要求它必须是绝对稳定的,而且还应保证系统具有一定的稳定程度。
只有这样,才能不致因系统参数变化而导致系统性能变差甚至不稳定。
对于一个最小相角系统而言,()G j ω曲线越靠近(1,0j -)点,系统阶跃响应的振荡就越强烈,系统的相对稳定性就越差。
因此,可用)(ωj G 曲线对(0,1j -)点的接近程度来表示系统的相对稳定性。
通常,这种接近程度是以相角裕度和幅值裕度来表示的。
相角裕度和幅值裕度是系统开环频率指标,它与闭环系统的动态性能密切相关。
1 相角裕度
相角裕度是指幅相频率特性)(ωj G 的幅值1)()(==ωωj G A 时的向量与负实轴的夹角,常用希腊字母γ表示。
图5-46 相角裕度和幅值裕度的定义 图5-47稳定裕度在Bode 图上的表示
在G 平面上画出以原点为圆心的单位圆,见图5-46。
)(ωj G 曲线与单位圆相交,交点处的频率c ω称为截止频率,此时有1)(=c A ω。
按相角裕度的定义
)
(180
)180()(c c ωϕωϕγ+=--=
(5-59)
由于01lg 20)(lg 20)(===c c A L ωω,故在伯德图中,相角余度表现为
dB
L 0)(=ω处的相角)(c ωϕ与 180-水平线之间的角度差,如图5-46所示。
上述
两图中的γ均为正值。
2 幅值裕度
)
(ωj G 曲线与负实轴交点处的频率g ω称为相角交界频率,此时幅相特性曲
线的幅值为)(g A ω,如图5-45所示。
幅值裕度是指(0,1j -)点的幅值1与)(g A ω之比,常用h 表示,即
)
(1g A h ω=
(5-60)
在对数坐标图上
20lg 20lg ()()g g h A L ωω=-=-
(5-61)
即h 的分贝值等于)(g L ω与dB 0之间的距离(dB 0下为正)。
相角裕度的物理意义在于:稳定系统在截止频率c ω处若相角再迟后一个γ角度,则系统处于临界状态;若相角迟后大于γ,系统将变成不稳定。
幅值裕度的物理意义在于:稳定系统的开环增益再增大h 倍,则g ωω=处的幅值)(g A ω等于1,曲线正好通过(0,1j -)点,系统处于临界稳定状态;若开环增益增大h 倍以上,系统将变成不稳定。
对于最小相角系统,要使系统稳定,要求相角裕度0>γ,幅值裕度1>h 。
为保证系统具有一定的相对稳定性,稳定裕度不能太小。
在工程设计中,一般取
60~30=γ,2≥h 对应20lg 6h dB ≥。
5.5.2 稳定裕度的计算
根据式(5-59),要计算相角裕度γ,首先要知道截止频率c ω。
求c ω较方便的方法是先由)(s G 绘制)(ωL 曲线,由)(ωL 与dB 0线的交点确定c ω。
而求幅值裕度h 首先要知道相角交界频率g ω,对于阶数不太高的系统,直接解三角方程
180)(-=∠g j G ω是求g ω较方便的方法。
通常是将)(ωj G 写成虚部和实部,令虚部为零而解得g ω。
例5-12 某单位反馈系统的开环传递函数为
)
5)(1()(0
++=
s s s K s G
试求100=K 时系统的相角裕度和幅值裕度。
解 ⎩⎨
⎧==++=
1
5
)
151)(
1(5)(00υK K s s s K s G 绘制开环增益250==K K 时的)(ωL 曲线如图5-48所示。
当2=K 时
)20(2
1
2
11
)5
(
1
2
)(2
2
2
2
2
2
2
<<=≈
=++=
c c
c
c c c c c A ωωωωωωωω
所以 2=c ω
5
.198.157.54905
arctan
arctan 90180
)
(180
1=--=---=∠+=c
c c j G ωωωγ
又由 0)5arctan(arctan 90180)(180=---=∠+︒g g g j G ωωω 有 arctan arctan(90o g g ωω+=
等式两边取正切: ∞==⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎣
⎡-
+
90tan 5152
g g g ωωω
得 0512
=-g
ω,即 236
.25==
g ω。
dB
A h g
g g g 9.8793.22
1
)5
(
1)
(12
2
1==++=
=
∴
ωωωω
在实际工程设计中,只要绘出)(ωL 曲线,直接在图上读数即可,不需太多计算。
图5-48 2=K 时的)(ωL 曲线。