船舶操纵重点
船舶操纵知识点

船舶操纵知识点船舶作为一种重要的交通工具,被广泛应用于海洋、河流等水域。
而在操纵船舶的过程中,船长和船员需要掌握一定的船舶操纵知识点,以确保船舶的安全运行。
本文将针对船舶操纵所需要了解的一些知识点进行探讨。
1. 舵角和操舵方式舵角是指船舶船轮转动的角度,通过舵角的调整,船长可以控制船的航向。
船舶可以通过手动操纵舵轮或使用自动操纵装置来调整舵角。
手动操纵舵轮通常需要两名船员协调,其中一名船员负责转动舵轮,另一名船员负责监督舵角的变化。
自动操纵装置则可以根据预设的航线和参数自动调整舵角,减轻船员的工作负担。
2. 舵手须知舵手是操纵船舶的重要角色之一。
舵手需要具备以下技能和知识点:a. 熟练掌握船舶结构和舵机操纵原理。
b. 熟悉船舶航行规则和航行标志。
c. 熟悉船舶吃水和排水情况,以及与潮汐等相关的水文地理知识。
d. 熟悉船舶不同航速状态下的不同舵角调整方式和技巧。
e. 熟悉船舶遇到紧急情况时的应急处置方式。
3. 转向和掉头船舶在航行中需要进行转向和掉头操作,以避免遇到障碍物或改变船的航向。
在进行转向和掉头时,船长需要考虑以下几点:a. 船舶的航速和航向。
b. 船舶的吃水和排水情况。
c. 船舶当前的舵角和转向方式。
转向方式分为渐变转向和急转弯两种。
渐变转向可以分为外侧弯和内侧弯,分别对应着船舶正常航行时左转和右转的状态。
急转弯则是在一定时间内使船舶快速改变航向。
4. 驾驶技巧和注意点a. 航行时需随时留意船舶周围环境,注意观察水流、风速、潮汐等因素的变化。
b. 船舶在不同航速状态下的操作方式和技巧不同,需注意切换。
c. 若发生船舶故障或天气突变等紧急情况,需及时采取应急处置措施。
d. 舵轮操作时需小心谨慎,避免过度调整舵角引发不必要的风险。
e. 在船舶停泊和起锚时,需注意船舶与岸边或其他船只的距离和方向,操作时需谨慎。
总结船舶操纵技巧和知识点涉及诸多方面,通过不断学习和实践,船长和船员可以掌握有效的操作技巧,确保船舶的安全运行。
船舶操纵技巧与技术

船舶操纵技巧与技术船舶操纵是航行中至关重要的一环,良好的操纵技巧和技术能够确保船只在复杂的水域中安全运行。
本文将介绍一些船舶操纵的技巧和技术,帮助船员更好地应对各种操纵挑战。
一、船舶操纵的基本原则船舶操纵的基本原则涉及到船舶动力学、水动力学和操纵设备的运用。
在实际操纵中,应遵循以下原则:1. 保持船舶稳定:船舶操纵过程中应尽量减小船舶的摇摆和倾斜,保持船舶的稳定性。
2. 控制速度和方向:及时、准确地通过手动或自动操纵设备调整船舶的速度和方向。
3. 避免碰撞和搁浅:注意监测船舶周围的水域情况,避免与其他船只、岛屿或障碍物碰撞,并确保船舶不会搁浅。
4. 灵活应对突发情况:当遇到突发情况,如恶劣天气、机械故障或其他紧急情况时,及时采取应对措施,确保船舶安全。
二、船舶操纵技巧1. 舵角和推力的协调运用:正确配合舵角和推力,通过调整舵柄和控制推进器来控制船舶的方向和速度。
2. 转向技巧:在进行转向操作时,应在中速航行状态下开始转向,逐渐增加船舶舵角,使船舶缓慢转向。
转向角度过大或过快都会引起摇摆或失控。
另外,进入弯道时应提前减速,以确保船舶在转弯过程中不会失控。
3. 使用舵动力特性:船舶舵的响应时间较长,因此在操纵船舶时,应提前预判和计划舵的动作,避免误操作。
同时,应注意保持适量的速度,以利用水流在船舶舵上的力量来帮助控制船舶运动。
4. 使用辅助设备:船舶操纵过程中,可以借助雷达、GPS、罗经等辅助设备来提供实时航行信息,帮助船员更好地掌握船舶位置、航向、速度等关键数据,从而进行准确的操纵。
三、船舶操纵技术1. 自动操纵技术:随着技术的进步,现代船舶配备了自动操纵系统,如自动驾驶系统、动力位置系统等,通过这些系统可以实现自动控制船舶的方向、速度和位置。
船员可根据实际情况灵活使用这些技术来提高船舶操纵的效率和安全性。
2. 航线规划和动态控制:在船舶操纵中,可以利用电子海图和航线规划系统来预先规划船舶的航线,并在航行中动态调整航线以应对不同的情况。
第二章 船舶操纵基本知识
第二章船舶操作基本知识船舶操纵是指船舶驾驶人员根据船舶操纵性能和客观环境因素,正确地控制船舶以保持或改变船舶的运动状态,以达到船舶运行安全的目的。
船舶操纵是通过车、舵并借助锚、缆和拖船来实现的。
要完成操纵任务,除保证所有操纵设备处于正常良好的技术状态外,操纵人员必须掌握船舶操纵性能(惯性和旋回性等)及对客观环境(风、流、水域的范围等)的正确估计。
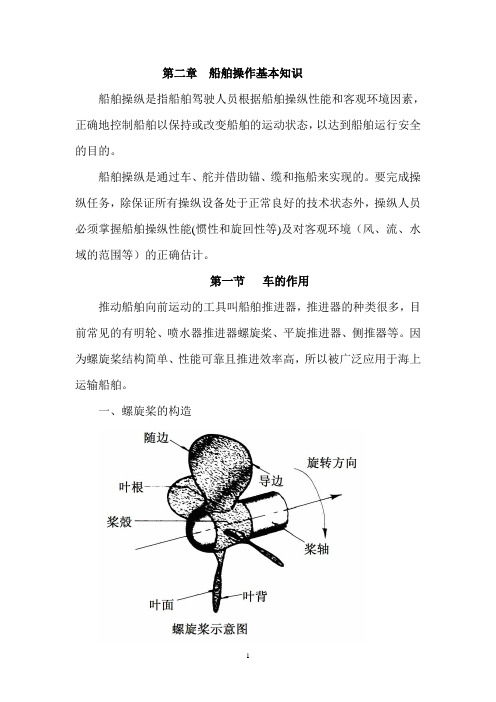
第一节车的作用推动船舶向前运动的工具叫船舶推进器,推进器的种类很多,目前常见的有明轮、喷水器推进器螺旋桨、平旋推进器、侧推器等。
因为螺旋桨结构简单、性能可靠且推进效率高,所以被广泛应用于海上运输船舶。
一、螺旋桨的构造1、螺旋桨的材料和组成螺旋桨常用铸锰黄铜、青铜和不锈钢制作。
现在也有采用玻璃制作的。
螺旋桨有桨叶和浆毂两部分组成,连接尾轴上。
(1)桨叶,一般为三片和四片,个别也有五片甚至六片的,低速船采用宽叶,高速船采用窄叶。
(2)桨毂,多数浆毂与桨叶铸成一体。
浆毂中心又圆锥形空,用以套在尾轴后部。
(3)整流帽(4)尾轴2、螺旋桨的配置一般海船都采用单螺旋桨,叫单车船。
也有部分船舶(客船和军舰)采用双螺旋桨,叫双车船。
单桨船的螺旋桨通常是右旋转式的。
右旋是指船舶在前进时,从船尾向船首看,螺旋桨在顺车时沿顺时针方向转动的称为右旋,沿逆时针方向转动的称为左旋。
目前,大多数商船均采用右旋式。
双桨船的螺旋桨按其旋转方向可分为外旋式和内旋式两,对于双桨船,往舷外方向转动的称为外旋,反之称内旋。
通常采用外旋,以防止水上浮物卷入而卡住桨叶。
进车时,左舷螺旋桨左转,右舷螺旋桨右转,则称为外旋式;反之,称为内旋式。
二、推力、阻力和功率1、船舶推力在主机驱动下,螺旋桨正车旋转时推水向后运动,水对螺旋桨的反作用力在船首方向的分量就是推船前进的推力,倒车时则产生指向船尾的拉力。
流向螺旋桨盘面的水流称为吸入流(suction current);离开螺旋桨盘面的水流称为排出流(discharge current)。
船舶操纵考点总结

船舶操纵考点总结第一章船舶操纵性能1.船舶由静止状态进车,达到相应稳定航速的前进距离与船舶排水量成正比,与相应的稳定的船速的平方成正比,与螺旋桨推力成反比。
2.船舶由静止状态进车,达到相应稳定航速的时间与船舶排水量成正比,与相应的稳定的船速的成正比,与螺旋桨推力成反比。
3.船舶由静止状态启动主机,到达到常速,满载船的航进距离约为船长的20倍,轻载约为满载的1/2---2/3。
4.船停船距离(冲程)/冲时:船在前进中下令停止主机至船对水停住的滑行距离和时间。
5.实测停车距离(冲程)/冲时:船在前进中下令停止主机至船对水余速将至2节时或对水速度降低到保持舵效的最低速度的滑行距离和时间。
6.停车冲程与船速的平方成正比,与排水量成正比。
7.航行船舶停车后速度变化:呈非线性变化,开始时速度下降快,而后下降慢,至终为0 8.影响冲程大小的因素与:排水量、初速度、船舶阻力、污底和浅水有关。
9.减速常数是指船舶停车后船速每递减一半所需的时间,减速常数随排水量的不同而不同,一般万吨船约为4Min.10.倒车距离(冲程)/冲时:船在前进中下令倒车至船对水停住移动时的滑行距离和时间。
11.倒车停止性能:从发令开始至船对水停止移动的这段时间所前进的距离。
12.实测倒车距离(冲程)/冲时:船在前进中下令倒车至船对水停住时的滑行距离和时间。
13.倒车停船距离:万吨级6-8L,5万吨8-10L,10万吨10-13L,15-20万吨级13-16L14.航行中船舶下令倒车后,速度的变化是主机倒车转速达到最大时下降快。
15.船舶航行中进行倒车,通常在关闭油门后,等船速降至全速的60%-70%,转速降至额定转速的25%-35%,停止主机在进行倒车启动。
16.全速倒车后,右旋螺旋桨船,向右偏转,航向变化可能超过90度,压载状态较满载状态右偏量更大。
左满舵比右满舵旋回圈小。
17.主机换向所需时间:蒸汽机指示功率60-90s,内燃机制动功率90-120s,汽轮机轴功率120-180s。
船舶操纵(内河船员考试)第二章知识要点
第二章系、离泊操纵第一节抛起锚操纵1.锚设备的作用有:停泊用锚、操纵用锚、应急用锚。
2.操纵用锚分:抛锚制动、控制船舶首向两种方法。
3.控制船舶速度和冲程时用锚的方法为:抛锚制动。
4.抛锚掉头、驶靠用锚、驶离用锚、抛锚倒车后退以稳定船首的方法都是控制船舶首向。
5.锚在操纵中可用于:控制余速、协助掉头、抛开锚利于离泊。
6.避免碰撞、触礁、搁浅,拖锚或拖链漂航、滞航,船舶搁浅后船体的固定及脱浅都属于应急用锚。
7.锚的抓力大小与:锚重、链长、底质、水深、抛锚方法有关。
8.锚的抓力大小决定于:锚型、锚重、锚杆的仰角、抛锚的方法;底质、水底地形、水深;与船舶的排水量和风、流、浪等外力的大小无关。
9.锚抓力为:锚的抓力系数与锚重的乘积。
链抓力为:锚链的抓力系数与平卧河底锚链重量的乘积。
10.锚型不同,锚的抓力系数不同。
按抓力系数的大小将不同锚型从小到大排列顺序为:霍尔锚——斯贝克锚——AC-14型大抓力锚。
11.当锚在河底被拖动2倍锚长时,锚爪开始抓土,锚的抓力将达最大值,一般为3~5倍锚重,这种姿势称为稳定抓底姿势。
12.锚在正常抓底状态下,抓力大;走锚状态下,抓力小。
13.当锚杆仰角为50时,抓力减小1/4,150时抓力减小1/2。
14.锚泊船的出链长度由两部分组成:悬垂链长和卧底链长。
15.锚泊力由锚抓力和链抓力两部分组成,其中链抓力等于卧底链长与河底的摩擦力。
16.悬垂链长不直接产生抓力,其作用是:使锚杆仰角为零,拉力呈水平方向,保证锚能充分发挥最大抓力,同时缓冲阵发性地作用在船体上的外力。
17.单锚泊时,锚链悬链长度:与锚重无关,与锚链单位长度重量有关。
18.单锚泊时,锚链卧底链长:与锚链单位长度重量有关,与船舶受到的外力有关。
19.单锚泊时,安全出链长度应:大于或等于悬链长度与卧底链长之和。
20.风速与锚泊船出链长度的关系为:风速为20m/s时,出链长度为3h+90m;30m/s时,出链长度为4h+145m。
知识点-船舶操纵避碰
艏余地不大,风流较强,顺流吹拢风艉先离
海空搜救:
多船平行航线i
操舵设备的要求:
一套故障不致另一套失效
艉余地不大,风流较弱,顶流吹开风艏先离
海空协同-
两条拖轮
靠泊时,功率大的在前
进坞时,功率大的在后(顶推)■■■后
本船人落水
单旋回,立即行动
威廉姆斯旋回(双半旋回),最适延迟,也可立即斯恰诺旋回,适用失踪,比威廉节省I-2里
冰量采用10分法航行
5时,冰厚不超过30cm,可航
HHHII
船舶长度
舷灯
艉灯
拖带灯
桅灯
6~7以上,需破冰和慢速航行
HHHIII
<12m
1
2
2
2
进入冰区
■■级■■入
缘,将冲力降至最小
12~20m
2
2
2
3
从下风侧,艏向垂直于冰
20~50m
2
2
漂角:船舶重心旋回时轨迹的切线与艏艉线的夹角。漂角越大,旋回性越好。
单锚泊
出链链长
风速20m/s,3倍水深+90
风速30m/s,4倍水深+145急流应比缓流多1节
测停船性能
倒车试验抛板法,测航迹进距,对水速为0结束一次实验
测冲程
制动试验,冲程与速度2和排水量成正比
系泊设备
养护周期
制缆索每航次
缆、钢丝绳、绞缆机3个月
两船对遇,转舵避让的时机相距两船进距之和以外
计算富裕水深,图水深+潮高-船静止时的最大吃水
-L11三水深20~100m,误差1m
海图水深允许俣差L―、口工
水深20m以下,误差0.3m
船舶靠码头操纵

靠码头GET ALONGSIDE一、准备工作:(1)了解情况;(2)掌握风、流;(3)制定靠泊计划。
二、操纵要点:1、控制余速:根据本船的停车趟航距离和当时风流的影响,在到达泊位之前适时停车,维持舵效即可;进入泊位下端时,如果速度太快,可预先倒车控制船速;到达泊位中点N旗时,船速以不超过2节为宜;横风较强时,为防止风压,余速要求稍大;有水流时,码头边比中间的流速小,从航道中进而码头会发现余速变大,应当特别注意。
2、摆好船位:到达泊位前2L以外时,应摆好船位;风流影响不大时,至少保持2B的横距;有吹拢风时,应先求出或估算出漂移距离;吹开风时,从船舶里舷至泊位下方靠泊的船舶的横距应不少于2B;到达泊位外档时的横距约为2B 时,应考虑抛开锚,到锚链吃力时,船身于码头间尚能保持越15米的安全距离。
3、控制靠拢角度:到达泊位外档时,船身与风流的交角越小越好。
抛下开锚后,用车作一定的角度,利用风流压使船向里靠拢,当需要保持横距时,及时用车舵消除与风流的夹角,反复几次,配合绞缆使船平行靠拢。
4、注意:重载船舶,顶流有力时,角度应小;河道弯曲处码头,一般有轧拢流,靠拢时应及早将船舶领直,必要时首略偏外。
三、靠码头介绍:1、无风无流右舷靠码头:1)根据本船的冲程及时停车趟航,无舵效时可以短时进车助舵。
2)控制余速:船舶泊位前1/4时,船舶与码头平行或稍有向里角度,至少保持2B与码头的横距,若冲势尚大时,可以倒车抑制,同时抛外档锚1节水面,倒车使船首偏右,用前冲余势向码头靠拢,锚链吃力后,若船舶以无甚前冲之势,船首将在锚链的牵制下外摆,立即稍用进车右舵稳定,使船舶缓缓靠拢。
3)撇缆上岸后,先带首缆及首倒缆,前面两根缆绳都带好后,带尾缆,绞拢船舶。
2、空船顶流吹拢风靠码头:1)据流速与航速适时停车趟航,船首进入泊位靠泊船舶的船尾时横距应不少于2B,以N旗横距1.5B出选择串视线;随着船速的降低和舵效的减弱,不能保持航向时,用微进车稳定;当船首驶过他船下风时,风压暂减,宜作下风舵,以防船舶被流压拢。
船舶操纵复习2

•
风致偏转的规律
• 题干: 船舶在前进中如风从正横前吹来, 则: A. 风力中心在重心前,水力中心在重心后 B. 风力中心在重心后,水力中心在重心前 C. 风力中心和水力中心在同一点上 D. 船首偏转方向不定,要看风力与水阻力 的力矩大小而定 答案:D
•
风致偏转的规律
• 题干: 重载船在海上高速行驶时,正横前 来风,船舶受风影响出现的偏转情况是: A. 顺风偏转 B. 迎风偏转 C. 基本不偏转 D. 尾偏向上风 答案:B
•
答案:B
风力和水动压力的三要素
• 题干: 船舶的水动力系数与下列哪些因素 有关? A. 漂角 B. 漂角和船体水下侧面积 C. 漂角和水深 D. 水深与海水密度 答案:C
•
风力和水动压力的三要素
• 题干: 船舶的水动力系数与漂角之间的关 系是? A. 随漂角增大而增大 B. 在漂角为30-40度和140-160度时存在 极大值 C. 在漂角为90度左右达到极大值 D. 漂角为零时,水动力系数为零 答案:C
操纵复习2
• 外界因素对操纵的影响
– 风、流对船舶操纵的影响
• 风致偏转和漂移的规律
– – – – 风动压力和水动压力的三要素 静止中、前进中和后退中的船舶风致偏转的规律 静止中船舶风致漂移速度 影响船舶风中保向的因素
• 流对旋回性、冲程及舵效的影响
– 流对旋回漂移距离的影响 – 流对冲程及舵效的影响
•
风力和水动压力的三要素
• 题干: 船舶受风时,其风力中心的位置将 随风舷角增大而: A. 由船中向船尾移动 B. 由后向前移动 C. 保持不变 D. 由前向后移动 答案:D
•
风力和水动压力的三要素
• 题干: 风对船舶作用力的方向: A. 决定于风级的大小 B. 较风向更偏于船舶正横方向 C. 较风向更偏于船舶首尾方向 D. 与风向一致
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
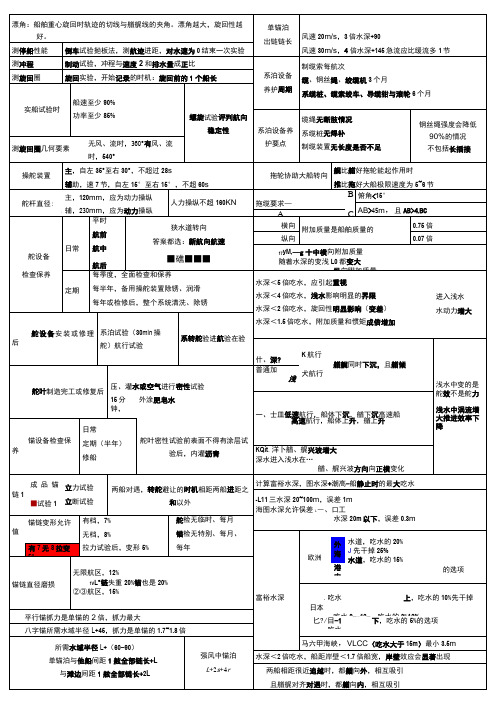
2、描述船舶旋回运动状态的运动要素
1) 漂角(drift angle)
船舶首尾线上某一点 的线速度与船舶首尾面的交 角叫做漂角,如左图所示。 船舶在首尾线上不同点的漂 角是不同的,在船尾处,由 于其横移速度最大,因此漂 角也最大。但通常所说的漂 角是指船舶重心处的线速度 Vt与船舶首尾面的交角,也 就是船首向与重心G点处旋回 圈切线方向的夹角,用B表示 之。一般船舶的漂角大约在 3°~15°之间。
第二节 船舶操纵方程及船舶操纵性指数
一、船舶操纵运动方程
Tŕ+r=Kδ
式中: K —— 旋回性指数(s-1); T —— 追随性指数(s); r —— 旋回角速度(1/s); ŕ —— 旋回角加速度(1/s2); δ —— 舵角(°)。
该方程最早是由日本学者野本谦作提出的,因此也称为野 本 方 程。 该式 中 , T 称之 为 船舶 的追 随 性指 数 (turning lag index),单位为s;K称之为船舶的旋回性指数(turning ability index)。
无因次化后的船舶操纵性指数K’、T’由于已经除去了船 舶尺度与船速的影响,故可直接用来比较不同船舶或同一船舶在 不同条件下的操纵性优劣及其变化趋势;反过来说,当两船的K、 T指数相等时,要使其操纵性能也相同,其船长和船速也应相同。
对于具备一般的操纵性能的船舶在满载状态下的K’、 T’应处于下列数值范围之内:
4) 旋回直径(final diameter) 旋回直径是指船舶作定常旋回时重心轨迹圆的直径, 亦称旋回终径,并以D表示之,它大约为旋回初径的0.9~ 1.2倍。 5) 滞距(reach) 亦称心距。正常旋回时,船舶旋回直径的中心O总较操 舵时船舶重心位置更偏于前方。滞距是该中心O的纵距,并 以Re代表之,大约为1~2倍船长,它表示操舵后到船舶进入 旋回的“滞后距离”,也是衡量船舶舵效的标准之一。
四、旋回圈要素在实际操船中的应用 由旋回试验测定的旋回圈资料是船舶操纵性能的重要 内容之一,它不仅用来评价船舶的旋回性能,同时还可以 直接用于实际操船。 1.旋回初径、进距、横距、滞距和在实际操船 中的应用
在水深足够的宽敞水域,旋回初径可以用来估算船舶用舵 旋回掉头所需的水域;横距可以用来估算操舵转首后,船舶与岸 或其他船舶是否有足够的间距;滞距可以用来推算两船对遇时无 法旋回避让的距离,即两船对遇时的距离小于两船的滞距之和, 则用舵无法避让;而两船的进距之和则可以用来推算对遇时的最 晚施舵点。
2)
转心(pivoting point)及其位置
旋回中的船舶可视为一方面船舶以一定的速度前进, 同时绕通过某一点的竖轴而旋转的运动的叠加,这一点就是 转心,通常以P代表之。船舶操舵旋回时,在旋回的初始阶段, 转心约在重心稍前处,以后随船舶旋回不断加快,转心随着 旋回中的漂角的增大而逐渐向船首方向移动;当船舶进入定 常旋回阶段即船舶旋回中的漂角保持不变时,转心P逐渐稳定 于某一点,对于不同船舶,该点的位置大约在离船首柱后1/ 3~1/5船长处;船处于后退中,转心位置则在船尾附近。 对于不同船舶而言,旋回性能越好、旋回中漂角B越大 的船舶,其旋回时的转心越靠近船首。
2、第二阶段 (过渡阶段)
操舵后随着船舶横 移速度的和漂角的增大, 船舶的运动逐渐偏离首 尾面而向外转动,进入 内倾消失,外倾出现并 逐渐增大的加速旋回阶 段 —正移外倾。
3、第三阶段 (定长旋回) 随着旋回阻尼力矩 的增大,当船舶所受的舵 力转船力矩N(a)、漂角水 动力转船力矩N(B)和阻 尼力矩N(r)相平衡时,船 舶的旋回角加速度变为零, 船舶的旋回角速度达到最 大值并稳定于该值,船舶 将进入稳定旋回阶段。 —定常旋回 。
4.操舵时间
操舵时间主要对船舶的进距影响较大,进距随操舵时 间的增加而增加,而对横距和旋回初径的影响不大,旋回直 径则不受其影响。
5.舵面积比
舵面积比(rudder area ratio)是指舵面积与船体浸 水侧面积(Lpp³d)的比值。增加舵面积将会使舵的转船力矩 增大,因而提高船舶的旋回性,旋回圈变小。但增加舵面积 的同时又增加了旋回阻尼力矩,当舵面积超过一定值后,旋 回性就不能提高。也就是说,就一定船型的船舶而言,舵面 积比的大小在降低旋回初径方面存在一个最佳值。
船舶操纵
绪论
所谓船舶操纵(Ship handling)是指船
舶的驾引人员利用船舶的操纵设备即车、
舵、锚、缆以及拖船等来抵御外界环 境条件包括风、流、浪、浅窄水、 岸壁等的影响,以保持或改变船舶的运动
状态所进行的操纵,包括分析、判断、指挥 和实施等。
学习目的:
1、全面掌握船舶的操纵性能、船舶操纵性指数的含义 及其在操船中的应用
3)
旋回中的降速
船舶在旋回中,主要由于船体斜航(存在漂角)时阻力增加,以 及舵阻力增加和推进效率降低等原因,将会出现降速现象。 一般船舶旋回中的降速幅度大约为旋回操舵前船舶速度的25 %~50%,而旋回性能很好的超大型油船在旋回中的降速幅度最 大可达到原航速的65%。
4)
旋
吃水 增加
尾倾 增加
水深 变浅
二、旋回圈的大小及其要素 概念: 定速直航(一般为全速)的船舶操一定舵角(一般为满舵) 后,其重心所描绘的轨迹叫做旋回圈(turning circle)。
1.表征旋回圈大小的几何要素
1) 进距(advance) 进距也称纵距,是指从操舵开始到船舶的航向转过 任一角度时重心所移动的纵向距离。通常,旋回资料中所 说的纵距,特指当航向转过90°时的进距,并以Ad表示之, 它大约为旋回初径的0.6~1.2倍。
三、K、T、指数无因次化数值范围及影响K、T指数的因素
1.K、T指数的无因次化数值范围
K、T指数通常由实船Z型实验测得 , 为了便于比较不 同船舶之间的操纵性,常将操纵性指数K、T作无因次化处理, 即消去其量纲的处理,即:
K’= K ·L / Vs
T’= T ·Vs / L
式中:L为船长,单 位为m; Vs为船速,单 位为m/s 。
11.螺旋桨的转动方向
由于受螺旋桨横向力的影响,船舶向左或向右旋回时的旋回圈 的大小将有所不同。对于右旋固定螺距螺旋桨单车船而言,在
其他条件相同的情况下,向左旋回时的旋回初径要比向右旋 回时的旋回初径要小一些。但对于超大型船舶而言,这一差 别很小。 另外,船体的污底、风、流的作用都将对船舶旋回圈 的大小产生影响。例如顶风、顶流使旋回圈进距减小,顺风、 顺流使旋回圈进距增大等等。
1.固有操纵性:包括追随性、定长旋回性、
航向稳定性
2.控制操纵性:包括改向性、旋回性、保向
性
第一节
概述:旋回性是指 定速直航的船舶操某 一大的舵角后进入定 常旋回的运动性能。
船舶的旋回性
旋回性是船 舶操纵性当中 极其重要的一 种性能!
一、船舶旋回的运动过程
1、第一阶段(转舵阶段)
船舶向一舷操舵后, 保持或近乎保持其直进速 度,同时开始进入基本沿 原航向前进而船尾外移同 时少量的向操舵一舷横倾 的初始旋回阶段 —反移内倾。
2、全面了解船舶所配备的操纵设备的基本性能,熟悉 他们在操船中的具体作用 3、掌握外界环境条件对操船的影响,在实际操船中趋 利避害加以运用或控制 4、掌握在各种环境条件下的操船方法
第一章
船舶操纵性能
概念:船舶操纵性能是指船舶对驾引人员实施
操纵的响应能力
分类:船舶操纵性能可分为固有操纵性和
控制操纵性
6.船速
一般说来,船速对 船舶旋回所需时间的长短 具有明显的影响,但对旋 回初径大小的影响却呈现 较为复杂的情况。
如图 减速旋回与加速旋回
7.吃水
若纵倾状态相同,吃水增加时,旋回进距增大,横距和旋回初径 也将有所增加。
8.吃水差
有吃水差和平吃水相比较,相当于较大程度地改变了船舶水线下 船体侧面积的分布状态,因而对船舶旋回性能带来明显的影响。尾倾增 大,旋回圈也将增大。
9.横倾
船体存在横倾时,左右浸水面积不同,两侧所受的水动压力也不相 同,改变了左右舷各种作用力的对称性。但总的来讲,横倾对旋回圈的 影响并不大。
10. 浅水影响
在浅水中的旋回圈明显增大。当水深吃水比小于2时,旋回圈 有所增大(特别是对高速船而言);当水深吃水比小于1.5时,旋回 圈明显增大;当水深吃水比小于1.2时,旋回圈急剧增大。
满载货船(L=100~150 m):K’=1.5~2.O; T’=1.5~2.5 满载油船(L=150~250 m):K’=1.7~3.0; T’=3.0~6.0
操纵性指数K’、T’值是通过实船Z形试验所 测定的。
2.影响K’、T’值的因素
船舶操纵性能指数K’、T’值,将随舵角、吃水、吃水差、 水深与吃水之比、船体水下线型等因素的变化而变化,且其 规律较为复杂,但总体来讲,趋势如表所列:
2) 横距(transfer)
横距是指从操舵开始到船舶的航向转过任一角度时船 舶重心所移动的横向距离。通常,旋回资料中所说的横距, 特指当航向转过90°时的横距,并以Tr表示之,它大约为旋 回初径的一半。 3) 旋回初径(tactical diameter) 旋回初径是指从操舵开始到船舶的航向转过180°时 重心所移动的横向距离,并以DT表示之。它大约为3~6倍的 船长。
6) 反移量(kick) 反移量亦称偏距,是指船舶重心在旋回初 始阶段向操舵相反一舷横移的距离。通常,该值 极小,其最大量在满载旋回时仅为船长的1%左 右。但操船中应注意的是,船尾的反移量却不容 忽视,其最大量约为船长的1/5~1/10,约出 现在操舵后船舶的转头角达一个罗经点左右的时 刻。反移量的大小与船速、舵角、操舵速度、排 水状态及船型等因素有关,船速、舵角越大,反 移量越大。
三、影响旋回圈大小的因素 1.方形系数Cb(block coefficient)
方形系数较低的瘦形高速船(Cb≈0.6)较方形系数较高的肥 形船(Cb ≈0.8)的旋回性能差得多,即船舶的方形系数越大,船 舶的旋回性越好,旋回圈越小。