清华大学结构力学第7章位移法107.
合集下载
结构力学-位移法
则梁端结点转角为0;若柱子不平行,则梁端结
点转角可由柱顶侧移表示出来。
(4)对于平行柱刚架不论横梁是平的,还是斜的, 柱子等高或不等高,柱顶线位移都相等。
a
Δ Δ
§7.4 位移法举例
例1:
q
B EI C
EI
杆长为:l
A
解:1.确定未知量
未知量为: B
2.写出杆端力的表达式
BC杆
M Bc
3
EI L
二、基本未知量的确定
1.无侧移结构基本未知量:所有刚结点的转角
1
2
1
2.有侧移结构
1
2
3
例1. B
C 例2. B
C
A
A
只有一个刚结点B,由于忽 略轴向变形,B结点只有 B
只有一个刚结点B, 由于忽略轴向变形及C 结点的约束形式,B结 点有一个转角和水平位 移 B BH
例3. B
l
A
F11
4EI A l
4EI A l
B
2
E l
I
A
θA
4i
2
E l
I
A
A
ql3 96 EI
4E l
I
A
基本体系法解题要点:
(1)位移法的基本未知量是结点位移;
(2)位移法的基本结构----单跨梁系; (3)位移法的基本方程是平衡方程; (4)建立基本方程的过程分为两步:
1)把结构拆成杆件,进行杆件分析; 2)再把杆件综合成结构,进行整体分析; (5)杆件分析是结构分析的基础。
第7章 位移法
基本要求:熟练掌握位移法解题的基本原理和超静定梁、刚架在荷 载作用下内力的计算。 掌握位移法方程建立的两种途径:一是利用直接平衡法 建立平衡方程,便于理解和手算;二是利用基本体系建 立典型方程,为矩阵位移法打基础,便于用计算机电算。 掌握对称性的利用。
点转角可由柱顶侧移表示出来。
(4)对于平行柱刚架不论横梁是平的,还是斜的, 柱子等高或不等高,柱顶线位移都相等。
a
Δ Δ
§7.4 位移法举例
例1:
q
B EI C
EI
杆长为:l
A
解:1.确定未知量
未知量为: B
2.写出杆端力的表达式
BC杆
M Bc
3
EI L
二、基本未知量的确定
1.无侧移结构基本未知量:所有刚结点的转角
1
2
1
2.有侧移结构
1
2
3
例1. B
C 例2. B
C
A
A
只有一个刚结点B,由于忽 略轴向变形,B结点只有 B
只有一个刚结点B, 由于忽略轴向变形及C 结点的约束形式,B结 点有一个转角和水平位 移 B BH
例3. B
l
A
F11
4EI A l
4EI A l
B
2
E l
I
A
θA
4i
2
E l
I
A
A
ql3 96 EI
4E l
I
A
基本体系法解题要点:
(1)位移法的基本未知量是结点位移;
(2)位移法的基本结构----单跨梁系; (3)位移法的基本方程是平衡方程; (4)建立基本方程的过程分为两步:
1)把结构拆成杆件,进行杆件分析; 2)再把杆件综合成结构,进行整体分析; (5)杆件分析是结构分析的基础。
第7章 位移法
基本要求:熟练掌握位移法解题的基本原理和超静定梁、刚架在荷 载作用下内力的计算。 掌握位移法方程建立的两种途径:一是利用直接平衡法 建立平衡方程,便于理解和手算;二是利用基本体系建 立典型方程,为矩阵位移法打基础,便于用计算机电算。 掌握对称性的利用。
结构力学位移法
FP
M BC -3iZ1
A
M BA M BC 0
1 Z1 56i FPl
3 M BA 56 FPl 当附加约束产生实际位移时,建立附加约束的
平衡方程,求解附加约束的位移,进而根据形
常数和载常数绘出各杆的内力图。
25
平衡方程法
以某些结点的位移为基本未知量 将结构拆成若干具有已知力-位移(转 角-位移)关系的单跨梁集合 分析各单跨梁在外因和结点位移共同 作用下的受力 将单跨梁拼装成整体 用平衡条件消除整体和原结构的差别, 建立和位移个数相等的方程 求出基本未知量后,由单跨梁力-位移关 系可得原结构受力
B 结点位移状态的一
致性。
18
P
A θA
C
θA
实现位移状态可分两步完成
1)在可动结点上附加约束, 限制其位移,在荷载作用下, 附加约束上产生附加约束力;
B 分析:
2)在附加约束上施加外力, 使结构发生与原结构一致的结 点位移。
1)叠加两步作用效应,约束结构与原结构的荷载特征及 位移特征完全一致,则其内力状态也完全相等;
2)结点位移计算方法:对比两结构可发现,附加约束上 的附加内力应等于0,按此可列出基本方程。
19
位移法基本思路
q
↓↓↓↓↓↓↓↓↓↓
A
C
βA
Z1
↓↓↓↓↓↓↓↓↓↓
A θA
Z1P
q ql2/12
q
ql2/12 ↓↓↓↓↓↓↓↓↓↓
A
C
C
Z1P
ql 2 Z1P - 12
l
EI=常数
B l
Z1=0
A A
26
2.典型方程法
图示各杆长度为 l ,EI 等于常数,分布集度q,
结构力学课后答案第7章位移法
(d)
解:(1)确定基本未知量
两个位移未知量,各种M图如下
(2)位移法典型方程
(3)确定系数并解方程
代入,解得
(4)求最终弯矩图
(e)
解:(1)确定基本未知量
两个角位移未知量,各种M图如下
(2)位移法典型方程
(3)确定系数并解方程
代入,解得
(4)求最终弯矩图
7-7试分析以下结构内力的特点,并说明原因。若考虑杆件的轴向变形,结构内力有何变化?
(a)
解:(1)利用对称性得:
(2)由图可知:
可得:
(3)求最终弯矩图
(b)
解:(1)利用对称性,可得:
(2)由图可知,各系数分别为:
解得:
(3)求最终弯矩图如下
(c)
解:(1)在D下面加一支座,向上作用1个单位位移,由于BD杆会在压力作用下缩短,所以先分析上半部分,如下图。
D点向上作用1个单位,设B向上移动x个单位,则 ,得 个单位。
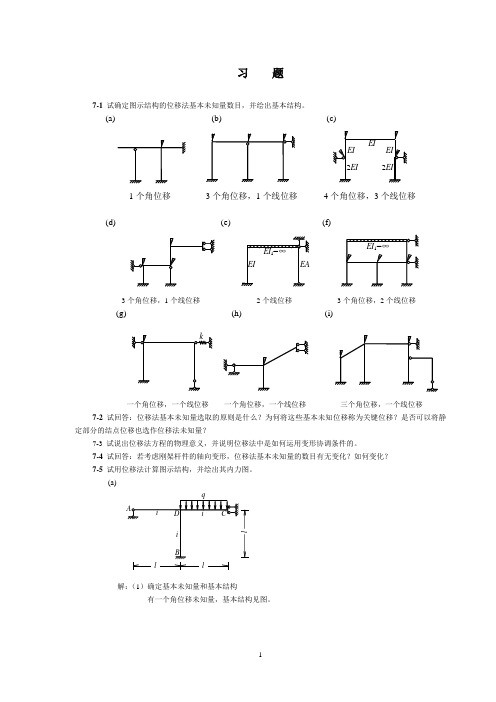
习题
7-1试确定图示结构的位移法基本未知量数目,并绘出基本结构。
(a)(b) (c)
1个角位移3个角位移,1个线位移4个角位移,3个线位移
位移3个角位移,2个线位移
(g)(h)(i)
一个角位移,一个线位移一个角位移,一个线位移三个角位移,一个线位移
7-2试回答:位移法基本未知量选取的原则是什么?为何将这些基本未知位移称为关键位移?是否可以将静定部分的结点位移也选作位移法未知量?
(a) (b) (c)
(d) (e) (f)
7-8试计算图示具有牵连位移关系的结构,并绘出M图。
(a)
解:(1)画出 图
由图可得:
由图可知:
(2)列方程及解方程组
解:(1)确定基本未知量
两个位移未知量,各种M图如下
(2)位移法典型方程
(3)确定系数并解方程
代入,解得
(4)求最终弯矩图
(e)
解:(1)确定基本未知量
两个角位移未知量,各种M图如下
(2)位移法典型方程
(3)确定系数并解方程
代入,解得
(4)求最终弯矩图
7-7试分析以下结构内力的特点,并说明原因。若考虑杆件的轴向变形,结构内力有何变化?
(a)
解:(1)利用对称性得:
(2)由图可知:
可得:
(3)求最终弯矩图
(b)
解:(1)利用对称性,可得:
(2)由图可知,各系数分别为:
解得:
(3)求最终弯矩图如下
(c)
解:(1)在D下面加一支座,向上作用1个单位位移,由于BD杆会在压力作用下缩短,所以先分析上半部分,如下图。
D点向上作用1个单位,设B向上移动x个单位,则 ,得 个单位。
习题
7-1试确定图示结构的位移法基本未知量数目,并绘出基本结构。
(a)(b) (c)
1个角位移3个角位移,1个线位移4个角位移,3个线位移
位移3个角位移,2个线位移
(g)(h)(i)
一个角位移,一个线位移一个角位移,一个线位移三个角位移,一个线位移
7-2试回答:位移法基本未知量选取的原则是什么?为何将这些基本未知位移称为关键位移?是否可以将静定部分的结点位移也选作位移法未知量?
(a) (b) (c)
(d) (e) (f)
7-8试计算图示具有牵连位移关系的结构,并绘出M图。
(a)
解:(1)画出 图
由图可得:
由图可知:
(2)列方程及解方程组
结构力学 7.位移法
也称“先拆后搭”
§7-1 位移法的基本概念
2 位移法计算刚架的基本思路
(1)基本未知量——A 和。
(2)建立位移法基本方程 ■刚架拆成杆件,得出杆件的刚度方程。 ■杆件合成刚架,利用刚架平衡条件,建立位移法基本方程。
§7 – 2 等截面直杆的刚度方程 正负号规定
结点转角 A 、 B 、弦转角( = / l ) 和杆端弯矩M AB
0
0
6
5ql
3ql
3l / 8
8
8
9ql2 / 128
(↑) (↑)
2ql
ql
7
5
10
(↑) (↑)
8
9ql
11ql
40
40
(↑) (↑)
§7-2 等截面杆件的刚度方程
表1:载常数表(续)
序号 计算图及挠度图
弯矩图及固端弯矩
9
10
5FPl / 32
11
12
固端剪力
FQAB
FQBA
FPb(3l 2 b2 ) 2l 3
M AB
4i A
2i B
6i
l
M BA
2i A
4i B
6i
l
(1)B端为固定支座 B 0
FQ AB FQ BA
6i l
A
6i l
B
12i l2
(2)B端为铰支座 MBA 0
M AB
4i A
6i
l
M BA
2i A
6i
l
M AB
3i A
3i
l
§7-2 等截面杆件的刚度方程
M AB
24
25
26
27
固端剪力
§7-1 位移法的基本概念
2 位移法计算刚架的基本思路
(1)基本未知量——A 和。
(2)建立位移法基本方程 ■刚架拆成杆件,得出杆件的刚度方程。 ■杆件合成刚架,利用刚架平衡条件,建立位移法基本方程。
§7 – 2 等截面直杆的刚度方程 正负号规定
结点转角 A 、 B 、弦转角( = / l ) 和杆端弯矩M AB
0
0
6
5ql
3ql
3l / 8
8
8
9ql2 / 128
(↑) (↑)
2ql
ql
7
5
10
(↑) (↑)
8
9ql
11ql
40
40
(↑) (↑)
§7-2 等截面杆件的刚度方程
表1:载常数表(续)
序号 计算图及挠度图
弯矩图及固端弯矩
9
10
5FPl / 32
11
12
固端剪力
FQAB
FQBA
FPb(3l 2 b2 ) 2l 3
M AB
4i A
2i B
6i
l
M BA
2i A
4i B
6i
l
(1)B端为固定支座 B 0
FQ AB FQ BA
6i l
A
6i l
B
12i l2
(2)B端为铰支座 MBA 0
M AB
4i A
6i
l
M BA
2i A
6i
l
M AB
3i A
3i
l
§7-2 等截面杆件的刚度方程
M AB
24
25
26
27
固端剪力
结构力学第七章-位移法(一)

由 M B = 0 同理可得,
FQAB 6i 6i 12i F A B 2 FQAB l l l
结构力学 第七章 位移法
2015年9月12日星期六
§7-2 等截面直杆的转角位移方程
等截面直杆的转角位移方程:
一端固端一端铰支的等截面直杆:
B端角位移不独立。
C
B A
AB:一端固定一端定向滑动 BC:一端固定一端定向滑动 BD:一端固定一端铰支
C
EI=c D B A
AB:两端固定 BC:一端固定一端定向滑动 BD:一端固定一端铰支
C
EI=c D B A
AB:两端固定 BC:两端固定 BD:一端固定一端铰支
C
EI=c D EI=c B A
AB:两端固定 BC:一端固定一端定向滑动 BD:两端固定
R1 = 0 R2 = 0 R3 = 0
R11 Z1
R21
R31
R12
R22 Z2
R32
R13
R23
R1P R33
R2P
P2
R3P
D EI=c A
E
F
D EI=c
E
F
D EI=c
E
F
P1
D EI=c A
E
F
B
C
A
B
C
A
B
C
B
C
(a)基本结构只发生 Z1
(b)基本结构只发生 Z 2
EI 1
B’ O
B
A’
EI
EI
EI
A EI
EI 1
不考虑杆件伸缩变形,AB 不能转动,无结点角位移
结构力学 第七章 位移法
结构力学I第7章 位移法

2015-12-21
Page 25
LOGO §7-2单跨超静定梁的形常数与载常数
2015-12-21
Page 26
LOGO
§7-3 位移法解无侧移刚架
如果刚架的各结点只有角位移而没有线位移,这种刚架 称为无侧移刚架。
位移法计算:
为什么不选结点C?
取结点角位移 ������������ 作为基本位置量。 C为支座结点!
6i 6i
/ /
l l
2015-12-21
A
=
1 3i
M
AB
1 6i
M
BA
l
M BA =0
B
=
1 6i
M
AB
+
1 3i
M
BA
l
M AB 3iA 3i / l
B 0
FQAB FQBA 0
M AB M BA
第七章 位移法
结构力学 I
浙江大学海洋学院 Tel : Email:
LOGO
§7-1 位移法基本概念
位移法是计算超静定结构的基本方法之一。
P
力法计算太困难了!
用力法计算,9个未知量 如果用位移法计算, 1个基本未知量
1个什么样的基本未知量?
Page 2
LOGO
§7-1位移法基本概念
一、位移法的提出(Displacement Method)
Page 20
LOGO §7-2单跨超静定梁的形常数与载常数
用位移法进行结构分析的基础是杆件分析。位移法的基 本结构为以下三种单跨超静定梁:
结构力学第七章位移法

几何不变体系
10
§7-3 位移法基本结构与未知量数目
二 位移法基本结构 1 附加刚臂 控制结点转动 2 附加链杆 控制结点线位移
ΔC C θC
ΔD θD
D
基本结构
将原结构结点位移锁住,所得单跨梁的组合体
11
三 位移法基本结构与未知量数目
ΔC
ΔD
Z1
θD
C θC
D
Z2 Z3
基本结构
结点角位移的数目=刚结点的数目=附加刚臂的数目 独立结点线位移的数目=附加链杆的数目
B
15i 16
6
0(2)
位移法方程实质上平衡方程 33
2i
3i/2Z2=1
A
D
2i
k 21
FQ BA
FQ CD
3i 2
B
C k22
FQBA
FQCD
3i
i2
3i/2
k 22
i
3i 4
3i 16
15i 16
B i
0
FQ BA
3i 4
C FQCD i
3i 2
M1
3i 4
A
FQ CD
3i 16
3i/2
D 3i/4 26
4
B
C F2P
3kN/m 3kN/m
16
皮肌炎图片——皮肌炎的症状表现
▪ 皮肌炎是一种引起皮肤、肌肉、 心、肺、肾等多脏器严重损害的, 全身性疾病,而且不少患者同时 伴有恶性肿瘤。它的1症状表现如 下:
▪ 1、早期皮肌炎患者,还往往伴 有全身不适症状,如-全身肌肉酸 痛,软弱无力,上楼梯时感觉两 腿费力;举手梳理头发时,举高 手臂很吃力;抬头转头缓慢而费 力。
10
§7-3 位移法基本结构与未知量数目
二 位移法基本结构 1 附加刚臂 控制结点转动 2 附加链杆 控制结点线位移
ΔC C θC
ΔD θD
D
基本结构
将原结构结点位移锁住,所得单跨梁的组合体
11
三 位移法基本结构与未知量数目
ΔC
ΔD
Z1
θD
C θC
D
Z2 Z3
基本结构
结点角位移的数目=刚结点的数目=附加刚臂的数目 独立结点线位移的数目=附加链杆的数目
B
15i 16
6
0(2)
位移法方程实质上平衡方程 33
2i
3i/2Z2=1
A
D
2i
k 21
FQ BA
FQ CD
3i 2
B
C k22
FQBA
FQCD
3i
i2
3i/2
k 22
i
3i 4
3i 16
15i 16
B i
0
FQ BA
3i 4
C FQCD i
3i 2
M1
3i 4
A
FQ CD
3i 16
3i/2
D 3i/4 26
4
B
C F2P
3kN/m 3kN/m
16
皮肌炎图片——皮肌炎的症状表现
▪ 皮肌炎是一种引起皮肤、肌肉、 心、肺、肾等多脏器严重损害的, 全身性疾病,而且不少患者同时 伴有恶性肿瘤。它的1症状表现如 下:
▪ 1、早期皮肌炎患者,还往往伴 有全身不适症状,如-全身肌肉酸 痛,软弱无力,上楼梯时感觉两 腿费力;举手梳理头发时,举高 手臂很吃力;抬头转头缓慢而费 力。
结构力学第7章位移法讲解
内力与位移的关系式;整体分析(组合)建立位 移法基本方程,解方程求出基本未知量; (4)由杆件的内力与位移关系式求出各杆件内力。
关于刚架的计算思路
A
P C
q
A
A
M AB
P A
A
M AB
A
C
B
B
第一种位移法的基本思路:
将结构拆成杆件,推导各杆件的内力和位 移的关系;再把杆件组装成结构,通过各 杆件在结点处的受力平衡列基本方程。
l
l
(1)
l FQBA
6i l
A
6i l
B
12i l2
(2)
几种不同远端支座的刚度方程
(1)远端为固定支座
MAB
A
EI l
(2)远端为固定铰支座
MAB
A
EI l
(3)远端为定向支座
MAB
A
EI
l
MBA
M M
AB BA
4i A 2i A
M BA
(2)由于相对线位移引起的A和B
A 2 B 2
A2 B2 l
以上两过程的叠加
A
1 3i
M
AB
1 6i
M
BA
l
M AB M BA
4i A 2i A
B
2iB 6i
4iB 6i
FQAB
1
1
6i
M AB
3i
M BA
BA
8
8
关于刚架的计算思路
A
P C
q
A
A
M AB
P A
A
M AB
A
C
B
B
第一种位移法的基本思路:
将结构拆成杆件,推导各杆件的内力和位 移的关系;再把杆件组装成结构,通过各 杆件在结点处的受力平衡列基本方程。
l
l
(1)
l FQBA
6i l
A
6i l
B
12i l2
(2)
几种不同远端支座的刚度方程
(1)远端为固定支座
MAB
A
EI l
(2)远端为固定铰支座
MAB
A
EI l
(3)远端为定向支座
MAB
A
EI
l
MBA
M M
AB BA
4i A 2i A
M BA
(2)由于相对线位移引起的A和B
A 2 B 2
A2 B2 l
以上两过程的叠加
A
1 3i
M
AB
1 6i
M
BA
l
M AB M BA
4i A 2i A
B
2iB 6i
4iB 6i
FQAB
1
1
6i
M AB
3i
M BA
BA
8
8
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
上述方法既可用于超静定结构(n>3),又可用于静 定结构(n=2)。
位移法要点如下:
1.基本未知量是结构的结点位移 2.基本方程是平衡方程 3.建立基本方程的过程分为两步:a.离散结构,进行 杆件分析,得出杆件的刚度方程;b.组装结构,得到 基本方程。 4.杆件分析是结构分析的基础。(刚度法)
4
二.位移法计算刚架基本思路
6
§7-2 等截面直杆的刚度方程
两个问题:已知端点位移下求杆端弯矩;已知荷
载作用下求固端弯矩。
一、符号规则
1.杆端弯矩 规定顺时针方向为正, 逆时针方向为负。 杆端弯矩的双重身份:
B
C
MBC
MBA
MCB
A
1)对杆件隔离体,杆端弯矩是外力偶,顺时 针方向为正,逆时针方向为负。 2)若把杆件装配成结构,杆端弯矩又成为内 力,弯矩图仍画在受拉边。
以上就是弯曲杆件的刚度方程。 以上矩阵为刚度矩阵, 系数称为刚度系数, 该系 数只与截面尺寸和材料性质有关的常数, 称为形常 数.
11
2. 一端固定、一端辊轴支座的梁
M AB
A
EI
B
M AB 3i A
A
A
A
i
B
l EI i l
A
M AB
i
3i l
B
M AB
3i 3i A l
F AB
l/2
M
l/2
ql 2 8
F AB
3FP l 16
17
3. 一端固定、一端滑动支座的梁
q
ql 2 3 A
l
M
M
F AB
FPl 2
Fp B
B A ql 2 6
l
F M AB
FPl 2
FP l 2
ql 2 3
ql 2 6
F BA
M
F BA
FP l 2
各种单跨超静定梁的固端弯矩可查教材附表。
6i 2i A 4i B l
1 ( M AB M BA ) l
此外,可得杆端剪力为
FQAB FQBA
即为:
FQAB FQBA
6i 6i 12i A B 2 l l l
10
为紧凑起见,可写成矩阵形式
4i M AB M BA 2i F QAB 6i l 2i 4i 6i l 6i l A 6i B l 12i l2
7
2.结点转角 顺时针为正,逆时针为负。 Fp A B C 3.杆件两端相对侧移
D
B( )
C( )
杆件两端相对侧移△,其与弦转角β 的正负 号一致。而β以顺时针方向为正,逆时针方向 为负。 l B A A B l
8
二、等截面直杆的刚度方程
1. 两端固定梁
A
EI
ql 12 A
ql 2 24 l
M
F AB
2
ql 12 B
2
FPl 8 A
l/2
Fp F l 8 P B
FPl 8
M
l/2
Fp l 8
16
M
F BA
ql 2 12
M
F AB
F BA
2. 一端固定、一端辊轴支座的梁
q
ql 8
2
A
ql 2 16
3FPl 16
Fp
5FPl 32
B
A
B
l
M
(刚度方程)
2
第二步,组装结构
i Δ sin i 变形协调条件: u n 节点平衡条件: FNi sin i FP
i 1
(n 5)
即 于是得
EAi 2 sin i FP i 1 li
FP 5 EAi 2 sin i i 1 l i
3
5
基本未知量求出后,每根杆件的位移和轴力可求出。
第七章 位移法
§7-1 §7-2 §7-3 §7-4 §7-5 位移法的基本概念 等截面直杆的刚度方程 无侧移刚架和有侧移刚架的计算 位移法的基本体系 对称结构的计算
§7-1 位移法的基本概念
一、关于位移法的简例
只要求出结点B位移,各杆伸长变形即可求出。然 后进一步可以求出杆件内力
EAi 第一步,分析单杆 FNi ui li
M BA
6i 2i A l
14
2)
MAB EI A i l
MAB
A
M AB
MAB i EI
B
A
A
EI i l
B
3i 3i A l
MAB
3)
MBA
A
l
A
B
A
EI i l
MBA
A
B
M AB i A M BA i A
15
三、固端弯矩
单跨超静定梁在荷载作用下产生的杆端弯矩称 为固端弯矩。固端弯矩以顺时针方向为正,逆时 针方向为负。 1. 两端固定梁 q
12
3. 一端固定、一端滑动支座的梁
MAB
EI
MBA
A
A
B
EI i l
M AB i A
M BA i A
13
4. 等截面直杆只要两端的杆端位移对应相同, 则相应的杆端力也相同。
EI MBA A i l
MAB MAB
1)
A
B
A
EI MBA A i l
B
M AB
6i 4i A l
18
在既有荷载作用,又有端点位移情况下,
F M 4 i 2 i 6 i M A B AB AB l 杆端弯矩为: F M BA 2i A 4i B 6i M BA l
6i 6i 12i F F F A B QAB 2 杆端剪力为: QAB l l l 6i 6i 12i F FQBA A B 2 FQBA l l l
分别分析杆AB和AC. 相对于杆AB和AC, A点分 别视为固定支座. 杆AB和AC分别受载荷和 支座位移作用.
基本未知量取为A点水平线位移和转角.
5
结点位移是处于关键地位的未知量。
基本思路:
首先把刚架拆成杆件,进行杆件分析——杆件在已知 端点位移和已知荷载作用下的计算;
其次把杆件组合成刚架,利用平衡条件,建立位移法 基本方程,借以求出基本未知量。
EI i l B
M AB 4i A M BA 2i A
AAຫໍສະໝຸດ iABl B
MAB
M AB 2i B M BA 4i B
MBA
A
i
MAB
B
i
MBA
B
A
A
EI
B
l
B
A
B
9
M AB M BA
6i l
由上图可得:
M AB
M BA
6i 4i A 2i B l