nastran patran MPC约束使用详细介绍
PATRAN的一些精华小技巧

PATRAN的一些精华小技巧1、在Patran里如何Move 一组Points 的位置, 而不改变这组Points 的ID 编号? Group/Transform/Translate的功能,这样不但编号不会变, 连property跟边界条件都会保留2、Patran如何执行多次Undo?所有Patran的操作步骤, 都记录在最新的一个patran.ses.xx中,如果需要多次undo, 可以刪除最后不需要的步骤指令行,再利用File -> Session -> Play 的方式, 执行改过的patran.ses.xx ,这样可以无限制的undo。
3、Patran中如何定义杆件之间的铰接?用的是rod元素,不需要定义铰接,因为rod元间本身就是以铰接形式连接。
如果用bar或是beam,需在properties里的Pinned DOFs @ Node 1/2定义铰接。
4、Patran 如何把不小心Equivalence的node分开用Utility/FEM-Elements/Separate Elements在equivalence时, 可以將选项切换为"List",只选择特定某些节点作equivalence, 可以避免不小心的失誤。
5、Patran如何將Tri3单元转换为Tri6单元在Patran -> Element -> Modify/Element/Edit , 將Type选项打勾,在Shape中选Tri, New Shape 选Tri6, 最后选取想要改变的Tri3单元,6、Patran 如何定义材料库Patran除了可以直接读取MSC.Mvision的材料材料库外,还可利用执行Session File的方式,直接使用以前已经定义过的材料。
编辑patran.ses.xx,将定义材料的PCL指令剪下,粘贴到另外一个文件中(如mat.ses)。
之后便可直接由Patran的File/ Session/ Play来加入此一材料的定义。
Patran中的MPC多点约束
Patran中的MPC—多点约束1.1 MPC定义MPC(Multi-point constraints)即多点约束,在有限元计算中应用很广泛,它允许在计算模型不同的自由度之间强加约束。
简单来说,MPC定义的是一种节点自由度的耦合关系,即以一个节点的某几个自由度为标准值,然后令其它指定的节点的某几个自由度与这个标准值建立某种关系。
多点约束常用于表征一些特定的物理现象,比如刚性连接、铰接、滑动等,多点约束也可用于不相容单元间的载荷传递,是一项重要的有限元建模技术。
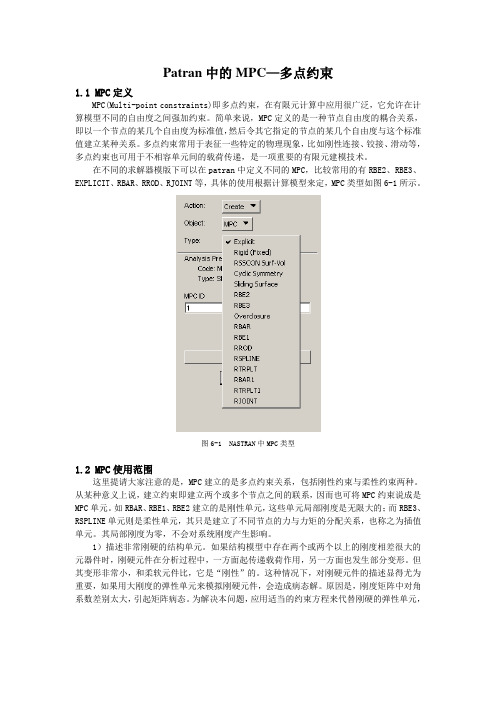
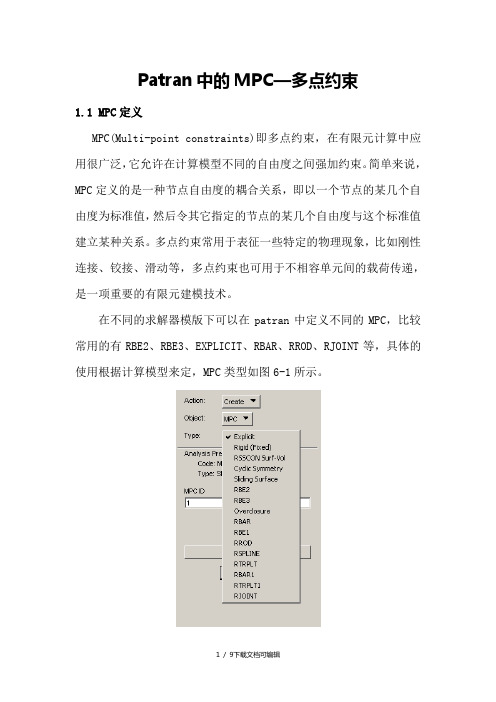
在不同的求解器模版下可以在patran中定义不同的MPC,比较常用的有RBE2、RBE3、EXPLICIT、RBAR、RROD、RJOINT等,具体的使用根据计算模型来定,MPC类型如图6-1所示。
图6-1 NASTRAN中MPC类型1.2 MPC使用范围这里提请大家注意的是,MPC建立的是多点约束关系,包括刚性约束与柔性约束两种。
从某种意义上说,建立约束即建立两个或多个节点之间的联系,因而也可将MPC约束说成是MPC单元。
如RBAR、RBE1、RBE2建立的是刚性单元,这些单元局部刚度是无限大的;而RBE3、RSPLINE单元则是柔性单元,其只是建立了不同节点的力与力矩的分配关系,也称之为插值单元。
其局部刚度为零,不会对系统刚度产生影响。
1)描述非常刚硬的结构单元。
如果结构模型中存在两个或两个以上的刚度相差很大的元器件时,刚硬元件在分析过程中,一方面起传递载荷作用,另一方面也发生部分变形。
但其变形非常小,和柔软元件比,它是“刚性”的。
这种情况下,对刚硬元件的描述显得尤为重要,如果用大刚度的弹性单元来模拟刚硬元件,会造成病态解。
原因是,刚度矩阵中对角系数差别太大,引起矩阵病态。
为解决本问题,应用适当的约束方程来代替刚硬的弹性单元,来创建更为合理的有限元模型。
2)在不同类型的单元间传递载荷。
如在有限元模型中,包含三维实体单元和壳体单元。
模型看来成功,没什么问题。
Patran中MPC(多点约束)应用
Patran中MPC(多点约束)应用——SQLMPC(Multi-point constraints)即多点约束,在有限元计算中应用很广泛,它允许在计算模型不同的自由度之间强加约束。
在不同的求解器模版下可以在patran中定义不同的MPC,比较常用的有rbe2,rbe3,explicit,rbar,rrod等,具体的使用根据计算模型来定。
MPC通用类型explicit(显式)MPC可以在一个从(dependent)自由度和一个或者多个主(independent)自由度之间创立,具体方程如下所示:U0 = C1U1 + C2U2 + C3U3 + ... + CnUn + C0式中U0为从自由度,Ui为主自由度,C0为常数项,举例说明,UX(Node 4) = 0.5*UX(Node 5) - 0.5*UY(Node 10) + 1.0A:我也来谈谈。
MPC主要使用在以下几个方面:1。
描述非常刚硬的结构单元。
假定结构模型中包括一个或多个比其他元件硬得多的元件,如汽车模型中的发动机,这时候刚硬元件可以传递载荷,但它的变形要小的多,和柔软元件比,它是“刚性”的。
如果用大刚度的弹性单元模拟刚硬单元,会造成病态解,原因是,刚度矩阵中对角系数差别太大,引起矩阵病态。
研究指出,应该用适当的约束方程来代替刚硬的弹性单元,以创建更为合理的有限元模型。
2.在不同类型的单元间传递载荷。
如果有限元模型中,包含三维实体单元和壳体单元。
模型看来成功,没异常。
但是求解在矩阵分解时失败了,因为缩减刚度矩阵是奇异的。
原因是模型中包含了一个“机构”。
无法将壳体单元上的力偶传递到实体单元上,因为实体单元没有转动自由度。
为了消除这种奇异性,必须建立一种连接,作用是在实体中建立一个耦合,以承受壳体力偶。
3。
任意方向的约束。
当某节点可以沿着不平行于坐标轴的某个边界运动时,就需要定义一个约束方程,这个方程反映垂直于此边界的运动的约束4。
刚性连杆A:RBE1和RBE2约束单元都是PABR和RTRPLT单元的推广,后者允许连接任意数量的几何格点。
abaqus——MPC问题多点约束解析
—多点约束MPC定义MPC(Multi-point constraints)即多点约束,在有限元计算中应用很广泛,它允许在计算模型不同的自由度之间强加约束。
简单来说,MPC定义的是一种节点自由度的耦合关系,即以一个节点的某几个自由度为标准值,然后令其它指定的节点的某几个自由度与这个标准值建立某种关系。
多点约束常用于表征一些特定的物理现象,比如刚性连接、铰接、滑动等,多点约束也可用于不相容单元间的载荷传递,是一项重要的有限元建模技术。
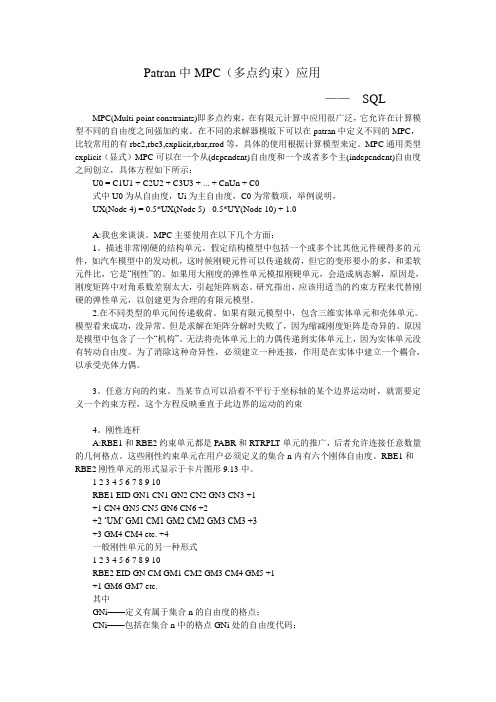
在不同的求解器模版下可以在patran中定义不同的MPC,比较常用的有RBE2、RBE3、EXPLICIT、RBAR、RROD、RJOINT等,具体的使用根据计算模型来定,MPC类型如图6-1所示。
图6-1 NASTRAN中MPC类型MPC使用范围这里提请大家注意的是,MPC建立的是多点约束关系,包括刚性约束与柔性约束两种。
从某种意义上说,建立约束即建立两个或多个节点之间的联系,因而也可将MPC约束说成是MPC单元。
如RBAR、RBE1、RBE2建立的是刚性单元,这些单元局部刚度是无限大的;而RBE3、RSPLINE单元则是柔性单元,其只是建立了不同节点的力与力矩的分配关系,也称之为插值单元。
其局部刚度为零,不会对系统刚度产生影响。
1)描述非常刚硬的结构单元。
如果结构模型中存在两个或两个以上的刚度相差很大的元器件时,刚硬元件在分析过程中,一方面起传递载荷作用,另一方面也发生部分变形。
但其变形非常小,和柔软元件比,它是“刚性”的。
这种情况下,对刚硬元件的描述显得尤为重要,如果用大刚度的弹性单元来模拟刚硬元件,会造成病态解。
原因是,刚度矩阵中对角系数差别太大,引起矩阵病态。
为解决本问题,应用适当的约束方程来代替刚硬的弹性单元,来创建更为合理的有限元模型。
2)在不同类型的单元间传递载荷。
如在有限元模型中,包含三维实体单元和壳体单元。
模型看来成功,没什么问题。
但是求解是,会出现“刚度矩阵奇异”的错误。
Patran中的MPC多点约束
Patran中的MPC—多点约束1.1 MPC定义MPC(Multi-point constraints)即多点约束,在有限元计算中应用很广泛,它允许在计算模型不同的自由度之间强加约束。
简单来说,MPC定义的是一种节点自由度的耦合关系,即以一个节点的某几个自由度为标准值,然后令其它指定的节点的某几个自由度与这个标准值建立某种关系。
多点约束常用于表征一些特定的物理现象,比如刚性连接、铰接、滑动等,多点约束也可用于不相容单元间的载荷传递,是一项重要的有限元建模技术。
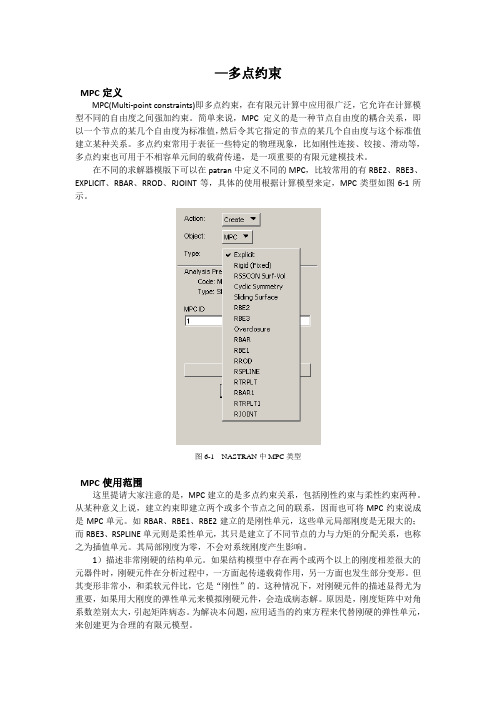
在不同的求解器模版下可以在patran中定义不同的MPC,比较常用的有RBE2、RBE3、EXPLICIT、RBAR、RROD、RJOINT等,具体的使用根据计算模型来定,MPC类型如图6-1所示。
图6-1 NASTRAN中MPC类型1.2 MPC使用范围这里提请大家注意的是,MPC建立的是多点约束关系,包括刚性约束与柔性约束两种。
从某种意义上说,建立约束即建立两个或多个节点之间的联系,因而也可将MPC约束说成是MPC单元。
如RBAR、RBE1、RBE2建立的是刚性单元,这些单元局部刚度是无限大的;而RBE3、RSPLINE单元则是柔性单元,其只是建立了不同节点的力与力矩的分配关系,也称之为插值单元。
其局部刚度为零,不会对系统刚度产生影响。
1)描述非常刚硬的结构单元。
如果结构模型中存在两个或两个以上的刚度相差很大的元器件时,刚硬元件在分析过程中,一方面起传递载荷作用,另一方面也发生部分变形。
但其变形非常小,和柔软元件比,它是“刚性”的。
这种情况下,对刚硬元件的描述显得尤为重要,如果用大刚度的弹性单元来模拟刚硬元件,会造成病态解。
原因是,刚度矩阵中对角系数差别太大,引起矩阵病态。
为解决本问题,应用适当的约束方程来代替刚硬的弹性单元,来创建更为合理的有限元模型。
2)在不同类型的单元间传递载荷。
如在有限元模型中,包含三维实体单元和壳体单元。
模型看来成功,没什么问题。
abaqus——MPC问题多点约束解析

6.MPC—多点约束1.1 MPC定义MPC(Multi-point constraints)即多点约束,在有限元计算中应用很广泛,它允许在计算模型不同的自由度之间强加约束。
简单来说,MPC定义的是一种节点自由度的耦合关系,即以一个节点的某几个自由度为标准值,然后令其它指定的节点的某几个自由度与这个标准值建立某种关系。
多点约束常用于表征一些特定的物理现象,比如刚性连接、铰接、滑动等,多点约束也可用于不相容单元间的载荷传递,是一项重要的有限元建模技术。
在不同的求解器模版下可以在patran中定义不同的MPC,比较常用的有RBE2、RBE3、EXPLICIT、RBAR、RROD、RJOINT等,具体的使用根据计算模型来定,MPC类型如图6-1所示。
图6-1 NASTRAN中MPC类型1.2 MPC使用范围这里提请大家注意的是,MPC建立的是多点约束关系,包括刚性约束与柔性约束两种。
从某种意义上说,建立约束即建立两个或多个节点之间的联系,因而也可将MPC约束说成是MPC单元。
如RBAR、RBE1、RBE2建立的是刚性单元,这些单元局部刚度是无限大的;而RBE3、RSPLINE单元则是柔性单元,其只是建立了不同节点的力与力矩的分配关系,也称之为插值单元。
其局部刚度为零,不会对系统刚度产生影响。
1)描述非常刚硬的结构单元。
如果结构模型中存在两个或两个以上的刚度相差很大的元器件时,刚硬元件在分析过程中,一方面起传递载荷作用,另一方面也发生部分变形。
但其变形非常小,和柔软元件比,它是“刚性”的。
这种情况下,对刚硬元件的描述显得尤为重要,如果用大刚度的弹性单元来模拟刚硬元件,会造成病态解。
原因是,刚度矩阵中对角系数差别太大,引起矩阵病态。
为解决本问题,应用适当的约束方程来代替刚硬的弹性单元,来创建更为合理的有限元模型。
2)在不同类型的单元间传递载荷。
如在有限元模型中,包含三维实体单元和壳体单元。
模型看来成功,没什么问题。
PATRAN的一些精华小技巧
PATRAN的一些精华小技巧1、在Patran里如何Move 一组Points 的位置, 而不改变这组Points 的ID 编号? Group/Transform/Translate的功能,这样不但编号不会变, 连property跟边界条件都会保留2、Patran如何执行多次Undo?所有Patran的操作步骤, 都记录在最新的一个patran.ses.xx中,如果需要多次undo, 可以刪除最后不需要的步骤指令行,再利用File -> Session -> Play 的方式, 执行改过的patran.ses.xx ,这样可以无限制的undo。
3、Patran中如何定义杆件之间的铰接?用的是rod元素,不需要定义铰接,因为rod元间本身就是以铰接形式连接。
如果用bar或是beam,需在properties里的Pinned DOFs @ Node 1/2定义铰接。
4、Patran 如何把不小心Equivalence的node分开用Utility/FEM-Elements/Separate Elements在equivalence时, 可以將选项切换为"List",只选择特定某些节点作equivalence, 可以避免不小心的失誤。
5、Patran如何將Tri3单元转换为Tri6单元在Patran -> Element -> Modify/Element/Edit , 將Type选项打勾,在Shape中选Tri, New Shape 选Tri6, 最后选取想要改变的Tri3单元,6、Patran 如何定义材料库Patran除了可以直接读取MSC.Mvision的材料材料库外,还可利用执行Session File的方式,直接使用以前已经定义过的材料。
编辑patran.ses.xx,将定义材料的PCL指令剪下,粘贴到另外一个文件中(如mat.ses)。
之后便可直接由Patran的File/ Session/ Play来加入此一材料的定义。
多点约束MPC-nastran
多点约束MPC-nastranMPC定义:定义:⼀个⾃由度的运动取决于其它 (⾄少⼀个) ⾃由度的运动:1.线性关系2.⼀个 (1) 从⾃由度3.“n” 个主⾃由度 (n >= 1)MPC定义其中系数ai是⽐例系数,ui是个⾃由度的位移;在nastran中1-3⾃由度的位移单位是mm;4-6⾃由度的位移单位是弧度;弧度换成⾓度的公式:⼀.只有⼀对主从节点;节点2向x运动=节点1向x运动;对应nastran中的数据卡⽚格式:其中:MPC-关键词卡⽚;SID-卡⽚编号;G1-从节点编号;C1-从节点⾃由度;A1-从节点⽐例系数;G2-主节点编号;C2-主节点⾃由度;A2-主节点⽐例系数;对应hypermesh中,dependent为从节点,independent为主节点;⼆.⼀对主从节点:节点2向1-6⾃由度运动,节点1向1-6⾃由度运动;(注意:MPC的节点编号是⼀个);⽐如车门铰链,三.MPC分析相对运动关系⽐如在分析发动机+减速器的时候,曲轴转动⾃由度与半轴转动⾃由度之间存在成⽐例的多点约束情况(可理解成⾃转),但是不可避免的是发动机+减速器同样存在转动的情况(可理解成公转)。
这种情况可引⼊参考点概念。
实际⼯况下,发动机外壳体存在⾃⾝的运动(公转),曲轴带动离合器从动侧转动(⾃转)经过变速箱-差速器传递到半轴,在模拟的时候选取参考点,进⽽更加准确的模拟转动传递的运动关系;假设变速齿⽐为1.5:1在不考虑发动机壳体⾃转的情况下,A:(B+C)=3:2;MPC表达式:2A+3(B+C)=0在考虑发动机壳体⾃传的情况下,2(A-P)+3{(B-Q)+(C-R)}=0其中ABCPQR代表5⾃由度的位移;所以,在nastran中的表达式为:其中abcpqr代表模型中节点的编号;总结:MPC多点约束在整车NVH分析中使⽤频率⽐较⾼,特别是刚性动⼒总成的建模;。
有限元 MPC问题多点约束
6.MPC—多点约束1.1 MPC定义MPC(Multi-point constraints)即多点约束,在有限元计算中应用很广泛,它允许在计算模型不同的自由度之间强加约束。
简单来说,MPC定义的是一种节点自由度的耦合关系,即以一个节点的某几个自由度为标准值,然后令其它指定的节点的某几个自由度与这个标准值建立某种关系。
多点约束常用于表征一些特定的物理现象,比如刚性连接、铰接、滑动等,多点约束也可用于不相容单元间的载荷传递,是一项重要的有限元建模技术。
在不同的求解器模版下可以在patran中定义不同的MPC,比较常用的有RBE2、RBE3、EXPLICIT、RBAR、RROD、RJOINT等,具体的使用根据计算模型来定,MPC类型如图6-1所示。
图6-1 NASTRAN中MPC类型1.2 MPC使用范围这里提请大家注意的是,MPC建立的是多点约束关系,包括刚性约束与柔性约束两种。
从某种意义上说,建立约束即建立两个或多个节点之间的联系,因而也可将MPC约束说成是MPC单元。
如RBAR、RBE1、RBE2建立的是刚性单元,这些单元局部刚度是无限大的;而RBE3、RSPLINE单元则是柔性单元,其只是建立了不同节点的力与力矩的分配关系,也称之为插值单元。
其局部刚度为零,不会对系统刚度产生影响。
1)描述非常刚硬的结构单元。
如果结构模型中存在两个或两个以上的刚度相差很大的元器件时,刚硬元件在分析过程中,一方面起传递载荷作用,另一方面也发生部分变形。
但其变形非常小,和柔软元件比,它是“刚性”的。
这种情况下,对刚硬元件的描述显得尤为重要,如果用大刚度的弹性单元来模拟刚硬元件,会造成病态解。
原因是,刚度矩阵中对角系数差别太大,引起矩阵病态。
为解决本问题,应用适当的约束方程来代替刚硬的弹性单元,来创建更为合理的有限元模型。
2)在不同类型的单元间传递载荷。
如在有限元模型中,包含三维实体单元和壳体单元。
模型看来成功,没什么问题。
patran&nastran使用经验积累
大部分东西在nastran、patran的帮助中都有介绍。
一、总1、nastran会生成许多文件,如*.dball(包含数据库运行的永久性数据)/*.f04(包括数据库文件信息和模块执行摘要)/*.f06(包含MSC.NASTRAN的分析结果)/*.log(包含系统信息和系统错误信息)/*.master(数据库运行总辞典)/*.op2(MSC.NASTRAN分析结果,为二进制文件)……。
如果数据库操作是设计好的,则中*.dbal/*.master可在运行后手动清除,也可通过附加执行语句SCR=YES来实现。
2、Nastran的输入文件包括几个部分,按先后顺序依次是:nastran语句(可选的)、文件管理段(可选的)、执行控制段(必须的,以限定符“CEND”结束)、情况控制段(必须的)、模型数据段(必须的,以限定符“BEGINE BULK”开始,以限定符“ENDDATA”结束)。
文件中行首为“$”表示是解释语句。
3、Nastran对物理单位无限制,只要求用户在建模时使用一致性单位制。
4、Nastran输入数据的格式有三种,整数、实数和字符。
整数不能包含小数点,实数必须包含小数点,字符可为字母数字的,但是必须以字母符号开头,其长度最多为8个字符。
5、Nastran有三种不同的输入数据格式:自由域格式(输入数据格式是用逗号分开的)、小域格式(共十个字域,每个子域有八个字符)、大域格式(十个子域,每个子域包含16个字符)。
文件管理段、执行控制段以及情况控制段采用自由域格式。
模型数据段允许任何一种。
模型数据段的每一个输入数据记录(卡)包含十个子域。
第一个子域填入该卡的特征名(如GRID,CBAR 等等)。
第二子域至第九子域包含该卡的数据输入信息。
第十子域不填数据,为继续卡预备。
Free、small、large field format6、nastran的坐标系中,所有角度输入都是按度表示,但输出(如转动位移)都以弧度表示。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
多点约束(MPC)
多点约束(MPC,Multi-Point Constraint)是对节点的一种约束,即将某节点
的依赖自由度定义为其它若干节点独立自由度的函数。
例如,将节点1的X方向位
移定义为节点2、节点3和节点4X方向位移的函数。
多点约束常用于表征一些特定的物理现象,比如刚性连接、铰接、滑动等,
多点约束也可用于不相容单元间的载荷传递,是一项重要的有限元建模技术。
但
是,建立明确的、能够正确描述各种现象的多点约束方程是非常不容易的。
对应于不同的分析解算器和分析类型,Patran支持的多点约束类型是不同的。
这里以Nastran的结构分析为例,则共有12种类型的多点约束,这里就以Explicit为
例来介绍。
Explicit:用于定义某节点的位移与其它若干节点位移的函
数关系,该函数是一个多项式。
如图所示,在“Explicit”的面
板上,可以明确地看到,其对应的分析解算“MSC.Nastran”,而
分析类型是“Structural”。
除过“Cyclic Symmetry”和
“Sliding surface”,其它所有的多点约束类型创建界面都很类
似,每个面板上都有按钮,单击它,可打开不同的
【define Terms】面板,用于不同多点约束的定义,Explicit对
应的【define Terms 】面板如右图所示。
该【define Terms 】
面板用于将一个节点某方向上的位移定义为若干个节点位移的一
次多项式函数。
有“Dependent Terms”、“Independent Terms”项、“Coefficient”
项、“Node List”项、“DOFs”项和四个操作项(“Create Dependent”、
“Create Independent”、“Modify”和“Delete”),自由度项“DOFs”有
六个选项:“UX”、“UY”、“UZ”、“RX”、“RY”和“RZ”,分别表示
节点的六个位移自由度。
使用时,一般先选定“Create Dependent”
项,输入一个节点及其某个方向的位移自由度,表示要建立该节
点该方向上位移的函数,所选定的节点和位移方向会显示在
“Dependent Terms”项中;接着,系统会自动选定“Create
Independent”项,即输入一些节点的位移作为函数的变量,在
“Coefficient”项中输入位移变量的系数,在“Node List”项
中输入作为变量的节点,在“DOFs”中选择位移自由度,单击
,则函数的一个变量定义完成。
这时,在“Independent
Terms”项中可以看到。
有几个变量,就重复操作几次,直到所有作为变量的节点位移都输入。
如果某个节点输入有误,可用“Modify”和“Delete”项修改和删除。
当所有的输入都完成之
后,单击图中的,就完成了一个多点约束的建立,屏幕上将以一个紫红色的小圆和若干
条连接依赖节点和独立节点的线段表示出来。
C yclic Symmetry:在两个不同的区域之间,建立一组柱面对称的多点约束边界条件,
从图3-19中可见,需要选择一个柱坐标系,该坐标系的Z轴将作为对称轴,在“Dependent Region”和“Independent Region”的文本框中,输入依赖节点和独立节点,依赖节点和独立节点必须成对出现,而且,各节点对的角度差应该相等。
S liding Surface:在两个相一致的区域的节点之间,定义一个滑动曲面。
对应节点间的移动自由度(即垂直于该曲面方向)被约束,但其它方向
上保持自由,
R igid(Fixed):赖节点与某个独立节点相互固定,从而使依赖节点的所有自由度都与独立节点保持一致,包括位移也保持一致,如图3-21所示。
这种多点约束在用曲面模拟板状实体时,可以连接不同的平面,从而可以使不同的曲面连接起来。