数字信号处理-程佩青-PPT第二章
数字信号处理课件ppt
| rws (k ) |2
2 w
1 dz 1 C Sss ( z) H opt ( z)S xs ( z ) z 2πj
通过前面的分析, 因果维纳滤波器设计的一般方法可以按 下面的步骤进行:
(1) 根据观测信号x(n)的功率谱求出它所对应的信号模型的
传输函数,即采用谱分解的方法得到B(z)。 S xs ( z) (2) 求 B( z 1 ) 的Z反变换,取其因果部分再做Z变换,即 S xs ( z ) 舍掉单位圆外的极点,得 B( z 1 ) (3) 积分曲线取单位圆,应用(2.3.38)式和(2.3.39)式,计 算Hopt(z), E[|e(n)|2]min。
1 ˆ' rxx (m) N
N |m|1
n 0
x ( n ) x ( n m)
平稳随机序列通过线性系统:
y (n)
k
h( k ) x ( n k )
k
m y E[ y (n )]
h(k ) E[ x(n k )]
k
ryy (m)
m0
k=0, 1, 2, …
利用白化x(n)的方法求解维纳-霍夫方程:
x(n)=s(n)+υ (n)
H(z) (a)
ˆ y ( n) s ( n)
x(
x(n)
1 B( z )
w(n)
G(z) (b)
ˆ y ( n) s ( n)
x(
图2.3.5 利用白化x(n)的方法求解维纳-霍夫方程
D (m)
2 x
rxx (m)
2 x (m)
《数字信号处理教程》程佩青(第三版)清华大学出版社课后答案

9
c) 设 x(n) = δ (n) + δ (n − 1)
i)向n > 0 处递推
y3 (1) = ay3 (0) + x3 (1) = 1 y3 (2) = ay3 (1) + x3 (2) = a y3 (3) = ay3 (2) + x3 (3) = a2
┇ y3 (n) = ay3 (n − 1) + x3 (n) = a n−1 ∴ y3 (n) = a n−1 , n ≥ 1 ii)向 n < 0 处递推
解:(1 )
n
y(n) = ∑ x(m ) m = −∞
n
y1 (n ) = T [x1 (n )] = ∑ x1 (m ) m = −∞
y2 (n ) = T [x2 (n )] =
n
∑ x2 (m )
m = −∞
n
ay1(n)+ by2 (n) = ∑[ax1(m) + bx2 (n)] m = −∞
10
T [ax1(n)+ bx2 (n)] =
n
∑
[ax1
(n
)
+
bx2
(n
)]
m = −∞
T[ax1(n) + bx2(n)] = ay1(n) + by2(n)
∴ 系统是线性系统
解:(2) y(n) =
[x(n )] 2
y1(n)
= T [x1(n)] = [x1(n)] 2
y2 (n) = T [x2 (n)] = [x2 (n)] 2
试判断系统是否是线性的?是否是移不变的?
分析:已知边界条件,如果没有限定序列类型(例如因果序列、反因果序列等), 则递推求解必须向两个方向进行(n ≥ 0 及 n < 0)。
《数字信号处理教程》程佩青第三版课后答案

10
T [ax1(n)+ bx2 (n)] =
n
∑
[ax1
(n
)
+
bx2
(n
)]
m = −∞
T[ax1(n) + bx2(n)] = ay1(n) + by2(n)
∴ 系统是线性系统
解:(2) y(n) =
[x(n )] 2
y1(n)
= T [x1(n)] = [x1(n)] 2
y2 (n) = T [x2 (n)] = [x2 (n)] 2
m = −∞
3
3 .已知 h(n) = a −nu(−n − 1) , 0 < a < 1 ,通过直接计算卷积和的办法,试确定 单位抽样响应为 h(n) 的线性移不变系统的阶跃响应。
解:
x(n) = u(n)
h(n) = a −nu(−n − 1) , 0 < a < 1
y(n) = x(n) * h(n)
ay1(n)+ by2 (n) = [ax1(n)] 2 + [bx1(n)] 2
∴ 系统不是线性系统
T [ax1(n)+ bx2 (n)] = [ax1(n) + bx2 (n)] 2 = [ax1(n)] 2 + [bx2 (n)] 2 + 2abx1(n)x2 (n) 即T [ax1(n)+ bx2 (n)] ≠ ay1(n)+ by2 (n)
j sin(
n 6
−π)
=
− cos
n 6
−
j sin
n 6
2π /ω 0 = 12π 5. 设系∴统是差非分周方期程的为。:
《数字信号处理教程》程佩青(第三版)清华大学出版社课后答案
结果 y (n ) 中变量是 n ,
∞
∞
∑ ∑ y (n ) =
x ( m )h (n − m ) =
h(m)x(n − m) ;
m = −∞
m = −∞
②分为四步 (1)翻褶( -m ),(2)移位( n ),(3)相乘,
(4)相加,求得一个 n 的 y(n) 值 ,如此可求得所有 n 值的 y(n) ;
10
T [ax1(n)+ bx2 (n)] =
n
∑
[ax1
(n
)
+
bx2
(n
)]
m = −∞
T[ax1(n) + bx2(n)] = ay1(n) + by2(n)
∴ 系统是线性系统
解:(2) y(n) =
[x(n )] 2
y1(n)
= T [x1(n)] = [x1(n)] 2
y2 (n) = T [x2 (n)] = [x2 (n)] 2
(3) y(n) = δ (n − 2) * 0.5n R3(n) = 0.5n−2 R3(n − 2) (4) x(n) = 2n u(−n −1) h(n) = 0.5n u(n)
当n ≥ 0 当n ≤ −1
∑ y(n) = −1 0.5n−m 2m = 1 ⋅ 2−n
m = −∞
3
y(n) = ∑n 0.5n−m 2m = 4 ⋅ 2n
+ 1)
−
x1 (n
+ 1)]
=
−a n
综上 i) , ii) 可知: y1 (n) = −a nu(−n − 1)
(b) 设 x(n) = δ (n − 1)
i)向 n > 0 处递推 ,
数字信号处理-程佩青第三版课件
xa(t) 0
xa(nT)
t
2T
0
t
T
这里 n 取整数。对于不同的 n 值,xa(nT) 是 一个有序的数字序列,该数字序列就是离散时间信 号。注意,这里的n取整数,非整数时无定义,另 外,在数值上它等于信号的采样值,即
x(n) xa (nT ), n
离散时间信号的表示方法:公式表示法、图形 表示法、集合符号表示法,如
称该系统是因果系统。 因果系统是指输出的变化不领
先于输入的变化的系统。
对于线性时不变系统,具有因果性的充要条件是 系统的单位取样响应满足:
如
稳定系统
稳定系统是指对于每个有界输入x(n),都产生有 界输出y(n)的系统。即如果|x(n)|≤M(M为正常数), 有|y(n)|<+∞,则该系统被称为稳定系统。
x(n) ...1,2,3,7,8,9,...
二、常用序列
1. 单位抽样序列(n)
(t) 1/
0 t
(n)
1
0
n
(t)
(1)
t
0
2. 单位阶跃序列u(n)
u(n) 0
u(t)
1
…
n
0
t
(n)与u(n)之间的关系
令n-k=m,有
3. 矩形序列RN(n)
N为矩形序
列的长度
R4(n)
n 012 3
4. 实指数序列
,a为实数
0<a<1
a>1
n
n
0
0
-1<a<0
a<-1
0
n0
n
a<-1或-1<a<0,序列的幅值摆动
(完整版)数字信号处理教程程佩青课后题答案
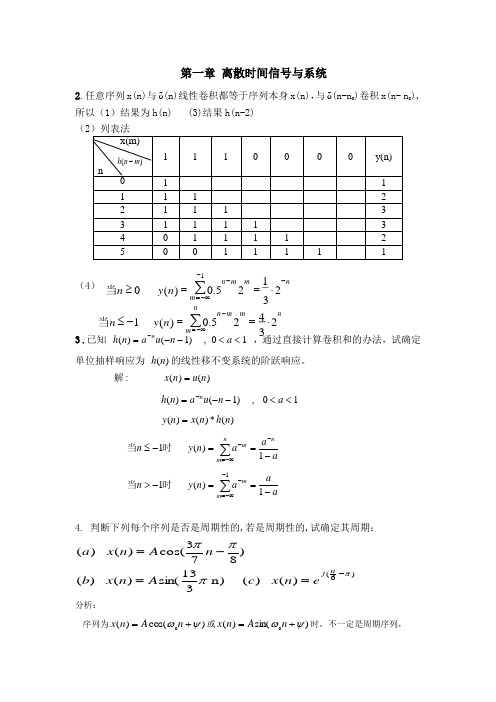
第一章 离散时间信号与系统2.任意序列x(n)与δ(n)线性卷积都等于序列本身x(n),与δ(n-n 0)卷积x(n- n 0),所以(1)结果为h(n) (3)结果h(n-2) (2(4)3 .已知 10,)1()(<<--=-a n u a n h n,通过直接计算卷积和的办法,试确定单位抽样响应为 )(n h 的线性移不变系统的阶跃响应。
4. 判断下列每个序列是否是周期性的,若是周期性的,试确定其周期:)6()( )( )n 313si n()( )()873cos()( )(ππππ-==-=n j e n x c A n x b n A n x a分析:序列为)cos()(0ψω+=n A n x 或)sin()(0ψω+=n A n x 时,不一定是周期序列,nmm m n n y n - - -∞ = - ⋅ = = ≥ ∑ 2 31 2 5 . 0 ) ( 01当 3 4n m nm m n n y n 2 2 5 . 0 ) ( 1⋅ = = - ≤ ∑ -∞ = - 当 aa a n y n a a an y n n h n x n y a n u a n h n u n x m m nnm mn -==->-==-≤=<<--==∑∑--∞=---∞=--1)(11)(1)(*)()(10,)1()()()(:1时当时当解①当=0/2ωπ整数,则周期为0/2ωπ;②;为为互素的整数)则周期、(有理数当 , 2 0Q Q P QP =ωπ ③当=0/2ωπ无理数 ,则)(n x 不是周期序列。
解:(1)0142/3πω=,周期为14 (2)062/13πω=,周期为6 (2)02/12πωπ=,不是周期的 7.(1)[][]12121212()()()()()()[()()]()()()()[()][()]T x n g n x n T ax n bx n g n ax n bx n g n ax n g n bx n aT x n bT x n =+=+=⨯+⨯=+所以是线性的T[x(n-m)]=g(n)x(n-m) y(n-m)=g(n-m)x(n-m) 两者不相等,所以是移变的y(n)=g(n)x(n) y 和x 括号内相等,所以是因果的。
数字信号处理(程佩青) 第二章 Z变换PPT资料优秀版
分子多项式P(z)的根是X(z)的零点,分母多项式Q(z)的根是 X(z)的极点。在极点处Z变换不存在,因此收敛域中没有极点, 收敛域总是用极点界定其边界。
不同形式的序列其收敛域形式不同,分别讨论如下:
12
2. z变换的收敛域
(1)有限长序列
在有限区间 n1 nn2之内具有不为零的有限
值的序列。其z变换为:
n2
X(z) x(n)zn nn1
(2.2)
要使(2.2)式收敛,则需要满足
x(n)zn n1 nn2
由于x(n)为有限值,所以要求
zn
n1 nn2
13
2. z变换的收敛域
显然在 0 z 上,都满足该条件。所以有限长序列 的收敛域为:
0 z
在n1,n2的特殊选择下,收敛域为:
0 z n1 0
Fourier 变换
由于x(n)为有限值,所以要求
(9)
设X(z)与Y(z)分别是x(n)与y(n)的z变换,即
(2)当n≤-2时:函数
在围线C外只有一个 4 一阶极点。
假如知道了向量r, p和k,利用residuez.
因果序列及其收敛域(包括z=∞ )
19
2. z变换的收敛域
(3)左边序列
在n n 2 时 x n 有值,在 n n 2 时 x n 0
收敛区域:对于所有的序列或所有的z值,z变换并 不总是收敛的。对于任意给定的序列,使z变换收敛的z 值集合称作收敛区域:
{Z:X(z)存在}=收敛区域。
注意:z变换收敛域的概念很重要,不同的 序列可能有相同的z变换表达式,但是收敛域却 不同。所以应该特别注意,只有当z变换的表达
式与收敛域都相同时,才能判定两个序列相等。
数字信号处理 程佩青 PPT第二章
1
= a n z n a n z n
n 1 n 0
az a z 1 az n 1
n n
az 1 z 1/ a
az 1 1 z a
a z
n 0
n n
1 1 az 1
当 a 1时,无公共收敛域,X( z )不存在
则
d ZT [nx ( n )]
若
ZT [ x (n )] X ( z ) Rx z Rx
则
ZT [ x* (n)] X * ( z* )
Rx z Rx
6、翻褶序列
若
ZT [ x (n )] X ( z ) Rx z Rx
其z变换:X ( z )
n
0
x(n ) z n x(n ) z n
n 1
n2
前式Roc: 0 z Rx
j Im[ z ]
后式Roc: z 0
当n2 0时,Roc : 0 z Rx 当n2 0时,Roc : 0 z Rx
Roc :
za
0
a
零点:z 0 极点:z a
Re[ z ]
例4:求x ( n ) a ,a为实数,求其z变换及其收敛域
n
解:X(z)= x(n ) z n = a z n = a n z n a n z n
n n n n n 0
1)有限长序列
x(n ) n1 n n2 x(n) 其它n 0
其Z变换:X ( z ) x(n ) z n
n n1 n2
数字信号处理-第2章-精品文档精选文档PPT课件
2.1、数字信号处理系统的基本组成
•大多数数字信号处理的应用中,信号为来自不同模拟信号源,这些模拟 信号(电压或电流)通常为连续时间信号。
•应用数字信号处理(DSP)主要有三个原因: 1)滤波:滤除信号中来自周围环境的干扰或噪声; 2)检测:检测淹没在噪声中的特定信号(如雷达或声纳系统中),当检测 到的信号超过给定的阈值则认为目标信号存在,反之认为不存在; 3)压缩:当信号转换到另外一个域后,在变换域上更容易分辨信息的重 要程度,对重要部分分配多的比特数,次要部分分配尽可能少的比特 数,达到压缩的目的(如DCT算法)。
的是离散时间信号。将连续时间信号转换成离散时间信号的过程叫抽样。
抽样可由称为A/D变换器的器件完成:
量化结果
声卡
5
模拟输入 xa (t)
Ts
抽样器
抽样输出
xˆa (t)
xˆa(t) xa(t)•P (t)
xa(t)(t nTs)
n
xˆa (t)
周期性抽样函数 P (t )
xˆa (t)
Ts
P(t) (tnTs)
是否可以根据抽样后的离散时间序列恢复原始信号? •奈奎斯特抽样频率:能够再恢复出原始信号的最低抽样频率(使 抽样后的信号频谱不发生混叠的最低抽样频率,即信号最高频率的 二倍)
0 s/2 s2 0
•满足奈奎斯特抽样频率的抽样信号可由理想低通滤波器恢复出原 始信号。此后将推导这个过程。
xˆa(t) G (j )/g (t( ) 低 通 y滤 (t) 波 xa) (t)
X a ( j)
xa
(t )e
jt dt
[xa
(t )
•
P
(t )]e
程佩青《数字信号处理教程(第三版)》课后习题答案精编版
第一章 离散时间信号与系统
1 .直接计算下面两个序列的卷积和 y( n ) = x( n )* h( n )
h (n )
=
⎧an ⎨
⎩0
, 0 ≤ n ≤ N −1 , 其他n
x (n )
=
⎧⎪ β ⎨
n−n 0
⎪⎩ 0
,n0 ≤ n , n < n0
请用公式表示。
分析:
①注意卷积和公式中求和式中是哑变量 m ( n 看作参量),
y (n ) ={1,2,3,3,2,1} ;
②δ (n)* x(n) = x(n) , δ (n − m)* x(n) = x(n − m) ;
③卷积和求解时, n 的分段处理。
6
解:(1) y(n) = x(n) * h(n) = R5(n) (2) y(n) = x(n) * h(n) = {1,2,3,3,2,1}
β α
n +1
β α β =
n +1− N −n0
N−
N
α −β
y(n) = Nα n−n0 ,
(α = β )
, (α ≠ β )
如此题所示,因而要分段求解。
2 .已知线性移不变系统的输入为 x( n ) ,系统的单位抽样响应
为 h( n ) ,试求系统的输出 y( n ) ,并画图。
(1)x(n) = δ (n)
∑ ∑( ) n α m−n0 n−m = β α = β m=n0
nn β
n0
α
n β −n0
− β n0
α
β n +1 α
1
−
β α
α β =
− n +1− n0
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
X z 5 A2 Res z 3 1 z 2 z 3 z 3 z z 3
2 z 3
X z 1 1 z z 2 z 3 z z 1 1 X z 1 z 2 z 3 1 2z 1 3 z 1
j Im[ z ]
j Im[ z ]
a
0
b
Re[ z ]
a
c
0
b Re[ z ]
c
j Im[ z ]
j Im[ z ]
a
0
a
b Re[ z ]
c
0
b
Re[ z ]
c
二、z反变换
z反变换: 从X(z)中还原出原序列x(n)
x ( n ) IZT [ X ( z )]
X ( z ) ZT [ x(n )]
单位圆上的系统函数 单位抽样响应h(n)的Fourier变换
H (e j ) H ( z )
其Z变换:X ( z ) x(n ) z n x (n ) z n
n n1 n 0 1
前式Roc: 0 z
后式Roc: Rx z
j Im[ z ]
当n1 0时,Roc : Rx z 当n1 0时,Roc : Rx z
则
ZT [ x* (n)] X * ( z* )
Rx z Rx
6、翻褶序列
若
ZT [ x (n )] X ( z ) Rx z Rx
1 则 ZT [ x ( n )] X z
1 1 z Rx Rx
10、序列的卷积和(时域卷积和)
M r
i 0 N
X ( z)
n 0
r A Ck n k Bn z 1 1 k k 1 1 zk z k 1 [1 zi z ]
用留数定理求系数: X ( z) Ak Re s z z zk k 1,2,, M r
5z 1 例:X ( z ) , 2< z 3,求z反变换 1 2 1 z 6z
数字信号处理
第二章
第二章 z变换
时域分析方法 变换域分析方法:
连续时间信号与系统 Laplace变换 Fourier变换 离散时间信号与系统 z变换 Fourier变换
一、z变换的定义及收敛域
1、z变换的定义
序列x(n)的z变换定义为:
X ( z ) ZT [ x (n )]
n
ZT [u ( n )] ZT [u ( n 3)]
z z 3 z z 1 z 1
z 1
z3 1 2 z ( z 1)
z2 z 1 z2
z 0
3、乘以指数序列
若
ZT [ x (n )] X ( z ) Rx z Rx
z 则 ZT [a x (n )] X a
n
x(n) z n M
P( z ) 令X ( z ) Q( z )
则X(z)的零点:使X(z)=0的点, 即P( z ) 0和当Q( z )阶次高于P( z )时 Q( z ) X(z)的极点:使X(z) 的点, 即Q( z ) 0和当P( z )阶次高于Q ( z )时P( z )
2
Roc : a < z 1/ a
j Im[ z ]
零点:z 0,
极点:z a, a 1
0
a
Re[ z ] 1/ a
给定z变换X(z)不能唯一地确定一个序列,只有
同时给出收敛域才能唯一确定。
X(z)在收敛域内解析,不能有极点,故:
右边序列的z变换收敛域一定在模最大的有限极点 所在圆之外 左边序列的z变换收敛域一定在模最小的有限极点 所在圆之内
Roc :
za
0
a
零点:z 0 极点:z a
Re[ z ]
例4:求x ( n ) a ,a为实数,求其z变换及其收敛域
解:X(z)= x(n ) z n = a z n = a n z n a n z n
n n n n n 0 1
0
例1 :求x ( n ) RN ( n )的z变换及其收敛域
解:X(z)= x(n ) z n = RN (n ) z n
n n
= z n 1 z 1 1 z n 0 zN 1 N 1 z ( z 1)
零点:z e
5 z 1 5z 5z 解:X z 2 1 2 1 z 6z z z 6 z 2 z 3
X z 5 A1 A2 z z 2 z 3 z 2 z 3
j Im[ z ]
3
0
2
Re[ z ]
X z 5 A1 Res 1 z 2 z 2 z 3 z 2 z z 2
1)有限长序列
x(n ) n1 n n2 x(n) 其它n 0
其Z变换:X ( z ) x(n ) z n
n n1 n2
j Im[ z ] Re[ z ]
Roc至少为: 0 z
0
2)右边序列
x(n ) n n1 x(n) n n1 0
设y(n)为x(n)与h(n)的卷积和:
y ( n ) x ( n ) * h( n )
m
x ( m)h( n m)
且
X ( z ) ZT [ x (n )] Rx z Rx H ( z ) ZT [h(n )] Rh z Rh
则 Y ( z ) ZT [ y (n )] X ( z ) H ( z )
六 、离散系统的系统函数、 系统的频率响应
LSI系统的系统函数H(z): 单位抽样响应h(n)的z变换
H ( z ) ZT [h( n )]
n
h(n ) z
n
Y ( z) X ( z)
其中:y(n)=x(n)*h(n)
Y(z)=X(z)H(z)
j H ( e ): 系统的频率响应
1 ZT [a u (n)] z a 1 1 az 1 n ZT [a u (n 1)] z a 1 1 az
n
1 1 2 z 1
z 2
2 n u ( n)
1 1 3 z 1
n
z 3
3
n
n
u(n 1)
x n 2 u n 3 u n 1
j 2 r N
N 1
N
n1 n2 1 q q n q 1 q n n1 n2
n2 时须满足 q 1
j Im[ z ]
r 1,..., N 1
0
Re[ z ]
极点:z 0 (N 1)阶
Roc : 0 z
例2:求x(n) a nu(n)的z变换及其收敛域
x(n) z n
z 是复变量,所在的复平面称为z平面
例:
X ( z ) 2 z 1 1.5z 1 z 2 +0.5 z 3
2、z变换的收敛域与零极点
对于任意给定序列x(n),使其z变换X(z)收敛的
所有z值的集合称为X(z)的收敛域。
级数收敛的充要条件是满足绝对可和
若
ZT [ x (n )] X ( z ) Rx z Rx
则 ZT [ x(n m)] z m X ( z )
Rx z Rx
m为任意整数
例:x(n) u(n) u(n 3),求X ( z ) 解:X ( z ) ZT [u(n) u(n 3)]
对各部分分式求z反变换:
x ( n ) IZT [ X ( z )]
IZT [ X 1 ( z )] IZT [ X 2 ( z )] IZT [ X K ( z )]
B( z ) X ( z) A( z )
M N
i b z i
M
1 ai z i
i 1
解:X(z)= x(n ) z n = a n u( n 1) z n
n n
= a z = a z
n n n 1 n 1
n n
当 a z 1时
1
a 1 z 1 1 1 a z 1 az 1
j Im[ z ]
0
Rx
n2 0
4)双边序列
n为任意值时皆有值
其z变换:X ( z )
n
1
x(n) z n x(n ) z n
n 0
前式Roc: 0 z Rx 后式Roc: Rx z
j Im[ z ]
Rx
Re[ z ]
Rx
当Rx Rx 时,Roc : 当Rx Rx 时,Roc : Rx z Rx
其z变换:X ( z )
n
0
x(n ) z n x(n ) z n
n 1
n2
前式Roc: 0 z Rx
j Im[ z ] Re[ z ]
后式Roc: 0 z
当n2 0时,Roc : 0 z Rx 当n2 0时,Roc : 0 z Rx
Rx
Re[ z ]
0
n1 0
包括z 处
因果序列
n1 0 的右边序列, Roc: Rx z