ds18b20多路温度采集程序
DS18B20温度检测程序
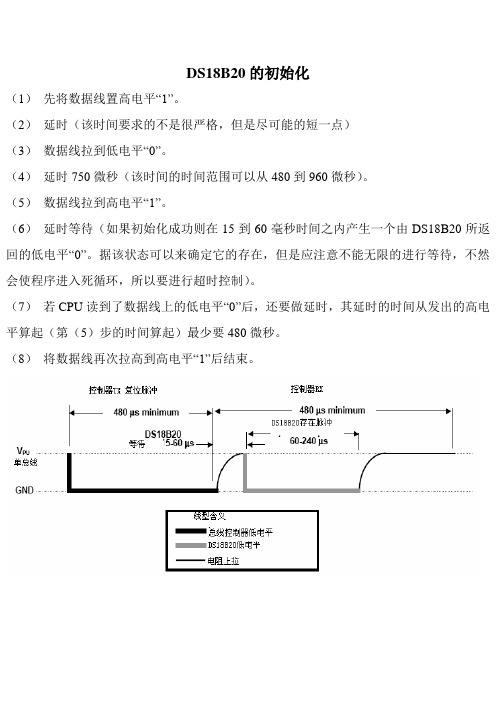
(1)先将数据线置高电平“1”。
(2)延时(该时间要求的不是很严格,但是尽可能的短一点)(3)数据线拉到低电平“0”。
(4)延时750微秒(该时间的时间范围可以从480到960微秒)。
(5)数据线拉到高电平“1”。
(6)延时等待(如果初始化成功则在15到60毫秒时间之内产生一个由DS18B20所返回的低电平“0”。
据该状态可以来确定它的存在,但是应注意不能无限的进行等待,不然会使程序进入死循环,所以要进行超时控制)。
(7)若CPU读到了数据线上的低电平“0”后,还要做延时,其延时的时间从发出的高电平算起(第(5)步的时间算起)最少要480微秒。
(8)将数据线再次拉高到高电平“1”后结束。
(1)数据线先置低电平“0”。
(2)延时确定的时间为15微秒。
(3)按从低位到高位的顺序发送字节(一次只发送一位)。
(4)延时时间为45微秒。
(5)将数据线拉到高电平。
(6)重复上(1)到(6)的操作直到所有的字节全部发送完为止。
(7)最后将数据线拉高。
DS18B20的写操作时序图如图DS18B20的读操作(1)将数据线拉高“1”。
(2)延时2微秒。
(3)将数据线拉低“0”。
(4)延时15微秒。
(5)将数据线拉高“1”。
(6)延时15微秒。
(7)读数据线的状态得到1个状态位,并进行数据处理。
(8)延时30微秒。
DS18B20的读操作时序图如图所示。
DS18B20的Protues仿真图源程序代码:#include "reg51.h"#include "intrins.h" // 此头文件中有空操作语句NOP 几个微秒的延时可以用NOP 语句,但本人没用NOP,直接用了I++来延时#define uchar unsigned char#define uint unsigned intuchar code table[]={0x30,0x31,0x32,0x33,0x34,0x35,0x36,0x37,0x38,0x39};sbit ds18b20_io=P2^0; //单片机与DS18B20的连接口sbit lcdrs=P2^6; //1602与单片机的接口sbit lcden=P2^7;unsigned char flag,tflag,i;unsigned int temper0,temper1,tvalue;float temperature;void delay() //6us 在KEIL中仿真出来的时间,这是调用DELAY所用的时间{i++;i++;}void Delay_50us(unsigned char t) //50us延时程序{unsigned char j;for(;t>0;t--)for(j=20;j>0;j--);}void delay1(uint z) //这个延时主要用在1602中,1602的读写时序没有//DS18B20那么严格{uint x,y;for(x=0;x<z;x++){ for(y=0;y<121;y++){;};};}uchar ds18b20_rst(){unsigned char j;ds18b20_io=1;i++; //1usds18b20_io=0;for(j=0;j<60;j++) //543us{delay();}ds18b20_io=1;for( j=0;j<7;j++) //65us{delay();}if(!ds18b20_io) //如果读到低电平,即复位成功{flag=1;}else flag=0; //如果没有读到低电平,则复位失败Delay_50us(9); //450usds18b20_io=1;return flag;}void ds18b20_writebyte(unsigned char byte){unsigned char j;for(j=0;j<8;j++){ds18b20_io=1;i++;ds18b20_io=0;delay(); //15usdelay();i++;i++;i++;ds18b20_io=byte&0x01;delay(); delay();delay();delay(); //48usdelay(); delay();delay();byte>>=1;ds18b20_io=1;delay();}ds18b20_io=1;}unsigned char ds18b20_readbyte() {unsigned char k,jj,i;jj=0;for(k=0;k<8;k++){ds18b20_io=1;i++; i++;ds18b20_io=0;delay(); //15usdelay(); i++;i++;i++;ds18b20_io=1;delay(); //15usdelay(); i++; i++;i++;if(ds18b20_io) //17us jj=(jj>>1)|0x80;elsejj>>=1;delay();delay(); delay(); //18us }return jj;}void write_com(uchar com){lcdrs=0;P1=com;delay1(5);lcden=1;delay1(5);lcden=0;}void write_data(uchar date){lcdrs=1;P1=date;delay1(5);lcden=1;delay1(5);lcden=0;}void init(){lcden=0;write_com(0x38);write_com(0x0C);write_com(0x06);write_com(0x01);}float read_temp()/*读取温度值并转换*/{if(ds18b20_rst()==1);{ds18b20_writebyte(0xcc);//*跳过读序列号*/ ds18b20_writebyte(0x44);//*启动温度转换*/ Delay_50us(30);}if(ds18b20_rst()==1);{ds18b20_writebyte(0xcc);//*跳过读序列号*/ds18b20_writebyte(0xbe);//*读取温度*/temper0 =ds18b20_readbyte();temper1 =ds18b20_readbyte();Delay_50us(20);}if(temper1&0xf8) //判断是正温度还是负温度{ //如果是高5位是0 为正温度,反则为负温度tflag=1;tvalue=(temper1<<8)|temper0;tvalue=((~tvalue)+1);temperature=tvalue*(0.0625);}else{tflag=0;tvalue=(temper1<<8)|temper0;temperature=tvalue*0.0625; //不用把tvalue进行转换,直接乘0.0625//的精度}return(temperature);}void write_xian(float date){uint bai,shi,ge,xiaozheng,xqian,xbai,xshi,xge;float k,m; //把浮点的DATA转换为整数,得到浮点娄的整数部分bai=(int)(date)/100; //把得到的整数部分拆开分别存在BAI SHI GE 中shi=((int)(date)%100)/10;ge=(int)(date)%10;if (bai!=0) //如果百不为0 则把整数部分全部显示{write_data(0x30+bai);write_data(0x30+shi);write_data(0x30+ge);}else if (shi!=0) //如果十不为0 则把十位和个位显示{write_data(0x30+shi);write_data(0x30+ge);}else write_data(0x30+ge);//如果百和十位都为0 ,则只显示个位数write_data(0x2e);k=date-(int)date; //取浮点娄的小数部分m=k*10000; //把得到的小数变为整数并显示xiaozheng=(int)m;xqian=(xiaozheng)/1000;xbai=((xiaozheng)%1000)/100;xshi=((xiaozheng)%100)/10;xge=(xiaozheng)%10;write_data(0x30+xqian);write_data(0x30+xbai);write_data(0x30+xshi);write_data(0x30+xge);}void main(){temperature=0.0;flag=0;tflag=0;tvalue=0;init();while(1){read_temp();if(tflag==0){write_xian(temperature); write_data(' '); write_data(' '); }if(tflag==1){write_data('-');write_xian(temperature); write_data(' '); write_data(' '); }write_com(0x80);}}。
DS18B20温度采集与控制

(3)发送 DS18B20 功能指令。
指令名称 温度转换
指令代码 44H
指令功能 启动 DS18B20 温度转换,最长 750ms,结果存于内部 9 字节 RAM
-1-
写暂存器
4EH
读暂存器 复制暂存器 重调 EEPROM 读供电模式
BEH 48H B8H B4H
发此命令后,可向内 RAM 发 3 个字节,1st 是 TH,2st 是 TL, 3st 配置寄存器 发此命令后,依次读出内 RAM 中 0~8 字节的内容,低位在前。 复制 2、3、4 字节的内容到 EEPROM 中 EEPROM 中的内容恢复到 2、3、4 字节 当 DS18B20 寄生供电时为“0”,外部电源供电为“1”
要想完成一次测温任务,首先需要主 MCU 指挥 DS18B20 进行一次温度转换,待转换完 成后,再让主 MCU 读取 DS18B20 内部 RAM 中的温度数据。具体操作如下:
(1)主 MCU 控制“1-Wire”总线进行复位初始化。参见“对 DS18B20 进行复位初始 化”操作。
(2)主 MCU 发送跳过 ROM 的操作(CCH)命令。 (3)主 MCU 发送转换温度的操作(44H)命令,后面释放总线至少 750 毫秒,让 DS18B20 完成转换的操作。 (4)主 MCU 发出复位操作并接收 DS18B20 的应答(存在)脉冲。 (5)主 MCU 发送跳过 ROM 的操作(CCH)命令。 (6)主 MCU 发送读取 RAM 的命令(BEH),随后主机依次读取 DS18B20 发出的从第 0 一第 8,共九个字节的数据。如果只想读取温度数据,那在读完第 0 和第 1 个数据后即丢 掉(不读)后续字节的内容。 上述操作中,涉及到主 MCU 对 DS18B20 的写(发送)操作和读(读取)操作,下文将 介绍如何完成这两种操作方法。 写操作:写操作周期最少为 60 微秒,最长不超过 120 微秒。写周期开始时,主机先把总 线拉低 1 微秒表示写周期开始。之后主机若想写 0,则继续拉低电平最少 60 微秒直至写周期 结束,然后释放总线为高电平。主机若想写 1,则拉低总线电平 1 微秒后就释放总线为高电 平,一直到写周期结束。 作为从机的 DS18B20 在检测到总线被拉低后等待 15 微秒然后从 15us 到 60us 开始对总 线采样,在采样期内总线为高电平则为 1,若采样期内总线为低电平则为 0。如下图所示。
18B20温度传感器温度计程序
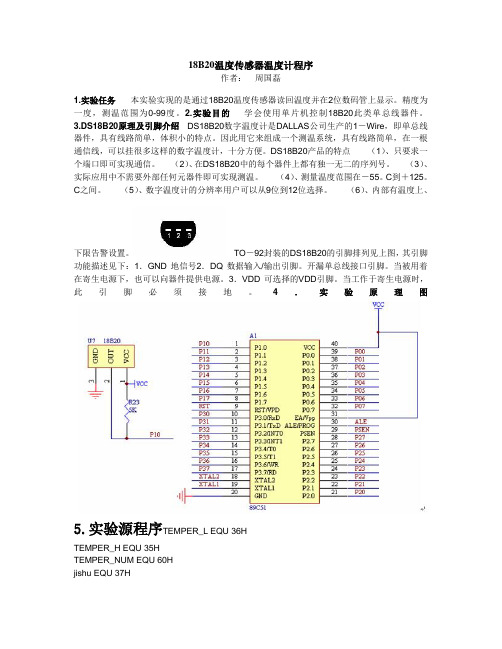
18B20温度传感器温度计程序作者:周国磊1.实验任务本实验实现的是通过18B20温度传感器读回温度并在2位数码管上显示。
精度为一度,测温范围为0-99度。
2.实验目的学会使用单片机控制18B20此类单总线器件。
3.DS18B20原理及引脚介绍DS18B20数字温度计是DALLAS公司生产的1-Wire,即单总线器件,具有线路简单,体积小的特点。
因此用它来组成一个测温系统,具有线路简单,在一根通信线,可以挂很多这样的数字温度计,十分方便。
DS18B20产品的特点(1)、只要求一个端口即可实现通信。
(2)、在DS18B20中的每个器件上都有独一无二的序列号。
(3)、实际应用中不需要外部任何元器件即可实现测温。
(4)、测量温度范围在-55。
C到+125。
C之间。
(5)、数字温度计的分辨率用户可以从9位到12位选择。
(6)、内部有温度上、下限告警设置。
TO-92封装的DS18B20的引脚排列见上图,其引脚功能描述见下:1.GND 地信号2.DQ 数据输入/输出引脚。
开漏单总线接口引脚。
当被用着在寄生电源下,也可以向器件提供电源。
3.VDD 可选择的VDD引脚。
当工作于寄生电源时,此引脚必须接地。
4.实验原理图5.实验源程序TEMPER_L EQU 36HTEMPER_H EQU 35HTEMPER_NUM EQU 60Hjishu EQU 37HFLAG1 BIT 00HDQ BIT P3.5AAA:SETB P2.0CLR P2.1MOV SP,#70HLCALL GET_TEMPERLCALL TEMPER_COVloop4:mov r5,#20loop3:mov 38H,#0ffhLOOP2:mov A,TEMPER_NUMMOV B,#10;MOV B,R5DIV ABSETB P2.2CLR P2.3MOV DPTR,#TABLE1MOVC A,@A+DPTRMOV P0,ALCALL DELySETB P2.3CLR P2.2MOV A,BMOV DPTR,#TABLE2MOVC A,@A+DPTRMOV P0,ALCALL DELydjnz 38H,loop2djnz r5, loop3sjmp aaaNOP;------------------读出转换后的温度值GET_TEMPER:SETB DQ ; 定时入口BCD:LCALL INIT_1820JB FLAG1,S22LJMP BCD ; 若DS18B20不存在则返回S22:LCALL DELAY1 MOV A,#0CCH ; 跳过ROM匹配------0CCLCALL WRITE_1820MOV A,#44H ; 发出温度转换命令LCALL WRITE_1820NOPLCALL DELAYLCALL DELAYCBA:LCALL INIT_1820JB FLAG1,ABCLJMP CBAABC:LCALL DELAY1MOV A,#0CCH ; 跳过ROM匹配LCALL WRITE_1820MOV A,#0BEH ; 发出读温度命令LCALL WRITE_1820LCALL READ_18200 ;READ_1820RET;------------------读DS18B20的程序,从DS18B20中读出一个字节的数据READ_1820:MOV R2,#8RE1:CLR CSETB DQNOPNOPCLR DQNOPNOPNOPSETB DQMOV R3,#7DJNZ R3,$MOV C,DQMOV R3,#23DJNZ R3,$RRC ADJNZ R2,RE1RET;-------------------写DS18B20的程序WRITE_1820:MOV R2,#8CLR CWR1:CLR DQMOV R3,#6DJNZ R3,$RRC AMOV DQ,CMOV R3,#23DJNZ R3,$SETB DQNOPDJNZ R2,WR1SETB DQRET;-------------------读DS18B20的程序,从DS18B20中读出两个字节的温度数据READ_18200:MOV R4,#2 ; 将温度高位和低位从DS18B20中读出MOV R1,#36H ; 低位存入36H(TEMPER_L),高位存入35H(TEMPER_H) RE00:MOV R2,#8RE01:CLR CSETB DQNOPNOPCLR DQNOPNOPNOPSETB DQMOV R3,#7DJNZ R3,$MOV C,DQMOV R3,#23DJNZ R3,$RRC ADJNZ R2,RE01MOV @R1,ADEC R1DJNZ R4,RE00RET;-------------------将从DS18B20中读出的温度数据进行转换TEMPER_COV:MOV A,#0F0HANL A,TEMPER_L ; 舍去温度低位中小数点后的四位温度数值SWAP AMOV TEMPER_NUM,AMOV A,TEMPER_LJNB ACC.3,TEMPER_COV1 ; 四舍五入去温度值INC TEMPER_NUMTEMPER_COV1:MOV A,TEMPER_HANL A,#07HSWAP AORL A,TEMPER_NUMMOV TEMPER_NUM,A ; 保存变换后的温度数据RET;-------------------将16进制的温度数据转换成压缩BCD码;-------------------DS18B20初始化程序INIT_1820:SETB DQNOPCLR DQMOV R0,#80HTSR1:DJNZ R0,TSR1 ; 延时SETB DQMOV R0,#25H ;96US-25HTSR2:DJNZ R0,TSR2JNB DQ,TSR3LJMP TSR4 ; 延时TSR3:SETB FLAG1 ; 置标志位,表示DS1820存在LJMP TSR5TSR4:CLR FLAG1 ; 清标志位,表示DS1820不存在LJMP TSR7TSR5:MOV R0,#06BH ;200USTSR6:DJNZ R0,TSR6 ; 延时TSR7:SETB DQRET;------------------重新写DS18B20暂存存储器设定值RE_CONFIG:JB FLAG1,RE_CONFIG1 ; 若DS18B20存在,转RE_CONFIG1RETRE_CONFIG1:MOV A,#0CCH ; 发SKIP ROM命令LCALL WRITE_1820MOV A,#4EH ; 发写暂存存储器命令LCALL WRITE_1820MOV A,#00H ; TH(报警上限)中写入00HLCALL WRITE_1820MOV A,#00H ; TL(报警下限)中写入00HLCALL WRITE_1820MOV A,#7FH ; 选择12位温度分辨率LCALL WRITE_1820RET;------------------延时子程序DELAY:MOV R7,#00HMIN:DJNZ R7,YS500RETYS500:LCALL YS500USLJMP MINYS500US:MOV R6,#00HDJNZ R6,$RETDELAY1:MOV R7,#20HDJNZ R7,$RETdely: mov r3,#100djnz r3,$retTABLE1: DB 0C0H,0F9H,0A4H,0B0H,99H,92H,82H,0F8H,80H,90H TABLE2: DB 0C0H,0F9H,0A4H,0B0H,99H,92H,82H,0F8H,80H,90H。
ds18b20多路温度采集程序

本程序为ds18b20的多路温度采集程序,是我自己参考其他程序后改写而成,可显示4路正负温度值,并有上下限温度报警(声音、灯光报警)。
亲测,更改端口即可使用。
(主要器件:51单片机,ds18b20,lcd显示器)附有proteus仿真图,及序列号采集程序/****上限62度下限-20度****/#include<reg51.h>#define uchar unsigned char#define uint unsigned intsbit ds=P1^1;sbit rs=P1^4;sbit e=P1^6;sbit sp=P1^0;sbit d1=P1^2;sbit d2=P1^3;ucharlcdrom[4][8]={{0x28,0x30,0xc5,0xb8,0x00,0x00,0x00,0x8e} ,{0x28,0x31,0xc5,0xb8,0x00,0x00,0x00,0xb9},{0x28,0x32,0xc5,0xb8,0x00,0x00,0x00,0xe0},{0x28,0x33,0xc5,0xb8,0x00,0x00,0x00,0xd7}};unsigned char code table0[]={"TEMPERARTURE:U "}; unsigned char code table1[]={"0123456789ABCDEF"};int f[4];int tvalue;float ftvalue;uint warnl=320;uint warnh=992;/****lcd程序****/void delayms(uint ms)//延时{uint i,j;for(i=ms;i>0;i--)for(j=110;j>0;j--);}void wrcom(uchar com)//写指令{delayms(1);rs=0;P3=com;delayms(1);e=1;delayms(1);e=0;}void wrdat(uchar dat)//写数据{rs=1;e=0;P3=dat;delayms(5);e=1;delayms(5);e=0;}void lcdinit()//初始化lcd {delayms(15);wrcom(0x38);delayms(5);wrcom(0x0c);delayms(5);wrcom(0x06);delayms(5);wrcom(0x01);delayms(5); }void display(uchar *p)//显示{while(*p!='\0'){wrdat(*p);p++;delayms(1);}}displayinit()//初始化显示{lcdinit();wrcom(0x80);display(table0);}/****ds18b20程序****/ void dsrst()//ds18b20复位{uint i;ds=0;i=103;while(i>0)i--;ds=1;i=4;while(i>0)i--;}bit dsrd0()//读一位数据{uint i;bit dat;ds=0;i++;ds=1;i++;i++;dat=ds;i=8;while(i>0)i--;return(dat);}uchar dsrd()//读1个字节数据{uchar i,j,dat;dat=0;for(i=8;i>0;i--){j=dsrd0();dat=(j<<7)|(dat>>1);}return(dat);}void dswr(uchar dat)//写数据{uint i;uchar j;bit testb;for(j=8;j>0;j--){testb=dat&0x01;dat=dat>>1;if(testb){ds=0;i++;i++;ds=1;i=8;while(i>0)i--;}else{ds=0;i=8;while(i>0)i--;ds=1;i++;i++;}}}void tmstart()//初始化ds18b20{sp=1;d1=1;d2=1;dsrst();delayms(1);dswr(0xcc);dswr(0x44);}void read_dealtemp()//读取并处理温度{uchar i,j,t;uchar a,b;for(j=0;j<4;j++){dsrst();delayms(1);dswr(0x55);for(i=0;i<8;i++){dswr(lcdrom[j][i]);//发送64位序列号}dswr(0xbe);a=dsrd();b=dsrd();tvalue=b;tvalue<<=8;tvalue=tvalue|a;if(tvalue<0){d1=1;tvalue=~tvalue+1;wrcom(0xc0);wrdat(0x2d);if(tvalue>warnl){d2=0;sp=0;}else{d2=1;sp=1;}}else{d2=1;wrcom(0xc0);wrdat(' ');if(tvalue>warnh){d1=0;sp=0;}else{d1=1;sp=1;}}if(j==0){wrcom(0x8e); wrdat('2');}if(j==1){wrcom(0x8e);wrdat('3');}if(j==2){wrcom(0x8e);wrdat('4');}if(j==3){wrcom(0x8e);wrdat('5');}ftvalue=tvalue*0.0625;tvalue=ftvalue*10+0.5;ftvalue=ftvalue+0.05;f[j]=tvalue;//温度扩大十倍,精确到一位小数tvalue=f[j];t=tvalue/1000;wrcom(0x80+0x41);wrdat(table1[t]);//显示百位t=tvalue%1000/100;wrdat(table1[t]);//显示十位t=tvalue%100/10;wrdat(table1[t]);//显示个位wrdat(0x2e); //显示小数点儿t=tvalue%10/1;wrdat(table1[t]);//显示小数位delayms(5000);}}/****主函数****/void main(){d1=1;d2=1;sp=1;displayinit();//初始化显示while(1){tmstart();//初始化read_dealtemp();//读取温度}}/****序列号读取程序****/#include <reg52.h>#define uchar unsigned char#define uint unsigned intsbit DQ = P1^1; //温度传感器信号线sbit rs = P1^4; //LCD数据/命令选择端(H/L)位声明sbit lcden = P1^6; //LCD使能信号端位声明void delay(uint z); //延时函数void DS18B20_Reset(void); //DQ18B20复位,初始化函数bit DS18B20_Readbit(void); //读1位数据函数uchar DS18B20_ReadByte(void); //读1个字节数据函数void DS18B20_WriteByte(uchar dat); //向DQ18B20写一个字节数据函数void LCD_WriteCom(uchar com); //1602液晶命令写入函数void LCD_WriteData(uchar dat); //1602液晶数据写入函数void LCD_Init();//LCD初始化函数void Display18B20Rom(char Rom); //显示18B20序列号函数/**********************************************//* 主函数*//**********************************************/void main(){ uchar a,b,c,d,e,f,g,h;LCD_Init();DS18B20_Reset();delay(1);DS18B20_WriteByte(0x33);delay(1);a = DS18B20_ReadByte();b = DS18B20_ReadByte();c = DS18B20_ReadByte();d = DS18B20_ReadByte();e = DS18B20_ReadByte();f = DS18B20_ReadByte();g = DS18B20_ReadByte();h = DS18B20_ReadByte();LCD_WriteCom(0x80+0x40);Display18B20Rom(h);Display18B20Rom(g);Display18B20Rom(f);Display18B20Rom(e);Display18B20Rom(d);Display18B20Rom(c);Display18B20Rom(b);Display18B20Rom(a);while(1);}/***************************************************//* 延时函数:void delay() *//* 功能:延时函数*//***************************************************/void delay(uint z)//延时函数{uint x,y;for( x = z; x > 0; x-- )for( y = 110; y > 0; y-- );}/***************************************************//* DS18B20函数:void DS18B20_Reset() *//* 功能:复位18B20 *//***************************************************/void DS18B20_Reset(void)//DQ18B20复位,初始化函数{uint i;DQ = 0;i = 103;while( i > 0 ) i--;DQ = 1;i = 4;while( i > 0 ) i--;}/***************************************************//* DS18B20函数:void DS18B20_Readbit() *//* 功能:读1个字节数据函数*//***************************************************/bit DS18B20_Readbit(void) //读1位数据函数{uint i;bit dat;DQ = 0;i++; //i++起延时作用DQ = 1;i++;i++;dat = DQ;i = 8;while( i > 0 )i--;return( dat );}/***************************************************//* DS18B20函数:void DS18B20_ReadByte() *//* 功能:读1个字节数据函数*//***************************************************/uchar DS18B20_ReadByte(void) //读1个字节数据函数{uchar i,j,dat;dat = 0;for( i = 1; i <= 8; i++ ){j = DS18B20_Readbit();dat = ( j << 7 ) | ( dat >> 1 );}return(dat);}/***************************************************//* DS18B20函数:void DS18B20_WriteByte() *//* 功能:向DQ18B20写一个字节数据函数*//***************************************************/void DS18B20_WriteByte(uchar dat) //向DQ18B20写一个字节数据函数{uint i;uchar j;bit testb;for( j=1; j<=8; j++){testb = dat&0x01;dat= dat>>1;if(testb) //写1{DQ = 0;i++;i++;DQ = 1;i = 8;while(i>0)i--; }else{DQ = 0; //写0 i = 8;while(i>0)i--; DQ = 1;i++;i++;}}}/* LCD函数:void LCD_WriteCom() *//* 功能:向LCD写入命令*//***********************************************/void LCD_WriteCom(uchar com){rs = 0;P3= com;delay(5);lcden = 0;delay(5);lcden = 1;delay(5);lcden = 0;}/***********************************************//* LCD函数:void LCD_WriteData(uchar dat) *//* 功能:向LCD写入数据*/void LCD_WriteData(uchar dat){rs = 1; //选择LCD为写入数据状态lcden = 0;P3= dat; //将待写入数据放到总线上delay(5);lcden = 1; //给LCD使能端一个脉冲delay(5); //信号将之前放到总线上lcden = 0; //的数据写入LCDdelay(5);}/***********************************************//* LCD函数:void LCD_Init() *//* 功能:初始化LCD,设定LCD的初始状态*/void LCD_Init(){LCD_WriteCom(0x38); //LCD显示模式设定delay(15);LCD_WriteCom(0x08); //关闭LCD显示delay(3);LCD_WriteCom(0x01); //LCD显示清屏delay(3);LCD_WriteCom(0x06); //设定光标地址指针为自动加1delay(3);LCD_WriteCom(0x0c); //打开LCD显示,但不显示光标}/**********************************************//* *//* 显示18B20序列号*//* *//**********************************************/void Display18B20Rom(char Rom){uchar h,l;l = Rom & 0x0f; //取低4位h = Rom & 0xf0; //取高4位h >>= 4;if( ( h >= 0x00 )&&( h <= 0x09 ) )LCD_WriteData(h+0x30);//取ASCII码elseLCD_WriteData(h+0x37);//取ASCII码if( ( l >= 0x00 )&&( l <= 0x09 ) )LCD_WriteData(l+0x30);//取ASCII码elseLCD_WriteData(l+0x37);//取ASCII码}。
DS18B20温度采集和显示程序

这个是我自己制作的51单片机板上的DS18B20温度采集和显示程序,你如果有现成的51板稍微修改一下可以用,在我这里是可以用没问题的。
环境是KEIL。
我这个51板也完全符合你的要求。
#pragma db code#include<AT89X52.H>//#include "reg52.h"#include "INTRINS.H"// 此实验是使用18B20检测温度,然后在数码管上显示#define uchar unsigned char#define uint unsigned int#define BUSY1 (DQ1==0)sbit LED_0=P1^0;sbit LED_1=P1^1;sbit LED_2=P1^2;sbit LED_3=P1^3;sbit DQ1=P1^6;//void delay(uint x);void display(unsigned char d1,unsigned char d2,unsigned char d3,unsigned char d4);void ds_reset_1(void);void wr_ds18_1(char dat);void time_delay(unsigned char time);int get_temp_1(void);void delay(unsigned int x);void read_ROM(void);int get_temp_d(void);/*=====0-9=====A-G=====*/uchar a[16]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0x88,0x83,0xc6,0x86,0x8e,0x82}; unsigned char ResultSignal;int ResultTemperatureLH,ResultT emperatureLL,ResultTemperatureH; unsigned char ROM[8];unsigned char idata TMP;unsigned char idata TMP_d;unsigned char f;unsigned char rd_ds18_1();unsigned int TemH,TemL;void main(){unsigned int TemH,TemL,k=0;ds_reset_1();ds_reset_1(); //resetwr_ds18_1(0xcc); //skip rom_nop_();wr_ds18_1(0x7f);ds_reset_1();wr_ds18_1(0xcc);_nop_();wr_ds18_1(0x44);for(k=0;k<11000;k++)time_delay(255);ds_reset_1();while(1){wr_ds18_1(0xcc);wr_ds18_1(0xbe);TemH=get_temp_1();TemL=get_temp_d();TemH&=0x00ff;TemL&=0x00ff;display((TemH/10),(T emH%10),(TemL/10),(TemL%10));}}/***************延时程序,单位us,大于10us*************/ void time_delay(unsigned char time){time=time-10;time=time/6;while(time!=0)time--;}/*****************************************************//* reset ds18b20 */ /*****************************************************/void ds_reset_1(void){unsigned char idata count=0;DQ1=0;time_delay(240);time_delay(240);DQ1=1;return;}void check_pre_1(void){while(DQ1);while(~DQ1);time_delay(30);}void read_ROM(void){int n;check_pre_1();wr_ds18_1(0x33);for(n=0;n<8;n++){ROM[n]=rd_ds18_1();}}/*****************************************************//* Read a bit from 1820 位读取*/ /*****************************************************/bit tmrbit_1(void){idata char i=0;bit dat;DQ1=0;_nop_();DQ1=1;_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();dat = DQ1;time_delay(50);return dat;}/*****************************************************//* read a bety from ds18b20 字节读取*/ /*****************************************************/unsigned char rd_ds18_1(){unsigned char idata i,j,dat=0;for(i=1;i<=8;i++){j=tmrbit_1();dat=(j<<(i-1))|dat;}return dat;}/*****************************************************//* write a bety from ds18b20 写字节*/ /****************************************************/void wr_ds18_1(char dat){signed char idata i=0;unsigned char idata j;bit testb;for(j=1;j<=8;j++){testb=dat & 0x01;dat = dat>>1;if(testb){DQ1=0;_nop_();_nop_();DQ1=1;time_delay(60);}else{DQ1=0;time_delay(50);DQ1=1;_nop_();_nop_();}}}int get_temp_1(void){unsigned char idata a=0,b=0; unsigned char idata i;EA=0;ds_reset_1();check_pre_1();wr_ds18_1(0xcc);wr_ds18_1(0x44);while(BUSY1);ds_reset_1();check_pre_1();wr_ds18_1(0xcc);wr_ds18_1(0xbe);a=rd_ds18_1();b=rd_ds18_1();i=b; /*若b为1则为负温*/ i=(i>>4);if(i==0){f=0;TMP=((a>>4)|(b<<4));a=(a&0x0f);if (a>8){TMP=(TMP+1);}}else{f=1;a=a>>4;b=b<<4;TMP=(a|b);TMP=~TMP;TMP=(TMP+1);}EA=1;return(TMP);}int get_temp_d(void){unsigned char idata a=0,b=0; unsigned char idata i,m;EA=0;ds_reset_1();//复位check_pre_1();wr_ds18_1(0xcc);wr_ds18_1(0x44);while(BUSY1);ds_reset_1();check_pre_1();wr_ds18_1(0xcc);wr_ds18_1(0xbe);a=rd_ds18_1();b=rd_ds18_1();i=b; /*若b为1则为负温*/ i=(i>>4);if(i==0){f=0;TMP=((a>>4)|(b<<4)); a=(a&0x0f);TMP_d=a;}else{f=1;a=~a;a=(a+1);b=~b;b=(b+1);m=a;a=a>>4;b=b<<4;TMP=(a|b);m=(m&0x0f);TMP_d=m;}EA=1;return(TMP_d);}void delay(unsigned int x) {unsigned int i;for(i=0;i<x;i++);}void display(unsigned char d1,unsigned char d2,unsigned char d3,unsigned char d4) {P2=a[d1];LED_0=0;delay(100);LED_0=1;P2=a[d2];LED_1=0;delay(100);LED_1=1;P2=a[d3];LED_2=0;delay(100);LED_2=1;P2=a[d4];LED_3=0;delay(100);LED_3=1;}。
DS18B20多路温度采集汇编程序

4路DS18B20温度显示汇编程序(可设置上下限和分路查看)作者蔡雄略;操作说明:;------------------------------------------;功能说明:模式选择键按下后,选择循环显示、分路查看,上限设置,下限设置功能;每按一次模式键,对应的模式指示灯会亮起。
;循环显示模式时候,每秒显示一下各路温度状况;分路查看时界面冻结每按一次+或-键进行各路切换;上限设置时每按一次+或-键对各路上限报警进行设置;下限设置时每按一次+或-键对各路下限报警进行设置;------------------------------------------仿真效果图:程序如下:;------------------------------------------;功能说明:模式选择键按下后,选择循环显示、分路查看,上限设置,下限设置功能;循环显示模式时候,每秒显示一下各路温度状况;分路查看时界面冻结每按一次+或-键进行各路切换;上限设置时每按一次+或-键对各路上限报警进行设置;下限设置时每按一次+或-键对各路下限报警进行设置;------------------------------------------;主程序S0EQU30H;50ms计数寄存器MODE_CONT EQU S0+1;模式计数器DS18B20_CONT EQU S0+2HI_TMP_SET_IN EQU S0+3;进水口LOW_TMP_SET_IN EQU S0+4HI_TMP_SET_OUT EQU S0+5;出水口LOW_TMP_SET_OUT EQU S0+6HI_TMP_SET_FRONT EQU S0+7;前后点HI_TMP_SET_BACK EQU S0+8TMP_IN EQU S0+12TMP_OUT EQU S0+13TMP_FRONT EQU S0+14TMP_BACK EQU S0+15DISPLAY_DATA EQU P0;LED数据口KEY_PORT EQU P3;按键口COM_TEMPERL_L BIT P2.7COM_TEMPERL_H BIT P2.6COM_TEMPERH_L BIT P2.5COM_TEMPERH_H BIT P2.4COM_DS18B20_NUM BIT P2.2LED_LOW_SET BIT P3.0LED_HI_SET BIT P3.1LED_CHECK BIT P3.2LED_NORMAL BIT P3.3IN_LED_ALARM_HI BIT P1.1;ININ_LED_ALARM_LOW BIT P1.3OUT_LED_ALARM_HI BIT P1.0;INOUT_LED_ALARM_LOW BIT P1.2FRONT_LED_ALARM_HI BIT P2.0BACK_LED_ALARM_HI BIT P2.1FLAG1BIT20H.5;DS18B20存在标志位DQ1BIT P1.7DQ2BIT P1.6DQ3BIT P1.5DQ4BIT P1.4TEMPER_L EQU28HTEMPER_H EQU27H;------------------------------------------ORG0000HAJMP STARTORG000BH;T0入口LJMP T_INT;------------------------------------------;START初始化;------------------------------------------ORG100HSTART:MOV TEMPER_L,#00HMOV TEMPER_H,#00HMOV MODE_CONT,#00HMOV DS18B20_CONT,#00HMOV HI_TMP_SET_IN,#100;进水口MOV LOW_TMP_SET_IN,#10MOV HI_TMP_SET_OUT,#100;出水口MOV LOW_TMP_SET_OUT,#10MOV HI_TMP_SET_FRONT,#100MOV HI_TMP_SET_BACK,#100CLR TMP_INCLR TMP_OUTCLR TMP_FRONTCLR TMP_BACKMOV S0,#00HMOV TMOD,#01HMOV TH0,#3CH;定时器0,模式1,定时时常50mS MOV TL0,#0B0HMOV IE,#82HMOV KEY_PORT,#0F8HSETB TR0;运行T0LCALL INIT_18B20;------------------------------------------;主函数;------------------------------------------MAIN:LCALL KEYLCALL GET_TEMPER;获取各路温度LCALL DISPLAY;调用显示程序LJMP MAIN;------------------------------------------;T0中服程序,实现1秒一次切换,同时1秒一次的比较各路温度是否超标;------------------------------------------;T0中服程序T_INT:PUSH ACCPUSH PSWMOV TH0,#3CH;定时器0,模式1,定时时常50mSMOV TL0,#0B0H;------------------------------NEXT:INC S0MOV A,S0CJNE A,#14H,ZDMOV S0,#00H;到1S后进行切换INC DS18B20_CONTMOV A,DS18B20_CONTCJNE A,#04H,ZDMOV DS18B20_CONT,#00HLCALL CHECK1;判断各路温度是否超标ZD:POP PSWPOP ACCRETI;-------------------------------------------;ALARM_CHECK;判断各路温度是否超标;-------------------------------------------CHECK1:MOV R0,TMP_INMOV R1,HI_TMP_SET_INLCALL ALARM_CALJZ ALARM_HI_NORMALSETB IN_LED_ALARM_HIJMP CHECK2ALARM_HI_NORMAL:CLR IN_LED_ALARM_HICHECK2:MOV R0,TMP_INMOV R1,LOW_TMP_SET_INLCALL ALARM_CALJNZ CCSETB IN_LED_ALARM_LOWJMP DDCC:CLR IN_LED_ALARM_LOW DD:MOV R0,TMP_OUTMOV R1,HI_TMP_SET_OUTLCALL ALARM_CALJZ EESETB OUT_LED_ALARM_HIJMP DDDEE:CLR OUT_LED_ALARM_HI DDD:MOV R0,TMP_OUTMOV R1,LOW_TMP_SET_OUTLCALL ALARM_CALJNZ FFSETB OUT_LED_ALARM_LOWJMP GGFF:CLR OUT_LED_ALARM_LOW GG:MOV R0,TMP_OUTMOV R1,HI_TMP_SET_FRONTLCALL ALARM_CALJZ HHSETB FRONT_LED_ALARM_HIJMP IIHH:CLR FRONT_LED_ALARM_HI II:MOV R0,TMP_OUTMOV R1,HI_TMP_SET_BACKLCALL ALARM_CALJZ JJSETB BACK_LED_ALARM_HIJMP ALARM_RET1JJ:CLR BACK_LED_ALARM_HI ALARM_RET1:RET;------------------------------------------;R0=R1A=2,R0<R1A=0,R0>R1A=1 ;比较大小;------------------------------------------ALARM_CAL:;R0,R1MOV A,R0SUBB A,R1JC SMALLMOV A,#01HJMP COMP_RETSMALL:MOV A,#0HCOMP_RET:RET;------------------------------------------;显示子程序;时分秒显示;------------------------------------------DISPLAY:MOV DPTR,#TABMOV A,TEMPER_LMOV B,#10DIV ABMOV R4,AMOV R5,BMOV A,R5;温度低位MOVC A,@A+DPTR;显示输出MOV DISPLAY_DATA,ASETB COM_TEMPERL_LLCALL DELAY5MSCLR COM_TEMPERL_LMOV A,R4MOVC A,@A+DPTR;显示输出MOV DISPLAY_DATA,ASETB COM_TEMPERL_HLCALL DELAY5MSCLR COM_TEMPERL_HMOV A,TEMPER_H;温度高位MOV B,#10DIV ABMOV R4,AMOV R5,BMOV A,R5MOVC A,@A+DPTR;显示输出ANL A,#7FH;MOV DISPLAY_DATA,ASETB COM_TEMPERH_LLCALL DELAY5MSCLR COM_TEMPERH_LMOV A,R4MOVC A,@A+DPTRMOV DISPLAY_DATA,ASETB COM_TEMPERH_HLCALL DELAY5MSCLR COM_TEMPERH_HMOV A,DS18B20_CONTINC AMOVC A,@A+DPTR;显示输出MOV DISPLAY_DATA,ASETB COM_DS18B20_NUMLCALL DELAY5MSCLR COM_DS18B20_NUMRET;------------------------------------------;键盘扫描程序;------------------------------------------KEY:;KEY_PORT,#0FFHMOV A,KEY_PORTCPL AANL A,#0F0HJZ RET1LCALL DELAY10MSMOV A,KEY_PORTCPL AANL A,#0F0HJZ RET1JB ACC.7,MODE_CHANGEJB ACC.6,MODE_DEC_JJB ACC.5,MODE_ADD_JJB ACC.4,NUM_ADD_JRET1:RETMODE_DEC_J:LJMP MODE_DECRETMODE_ADD_J:LJMP MODE_ADDRETNUM_ADD_J:LJMP NUM_ADDRETMODE_CHANGE:INC MODE_CONTMOV A,MODE_CONTCJNE A,#04H,MODE_RETMOV MODE_CONT,#00HSETB TR0MODE_RET:LCALL MODE_DEL WAIT:LCALL DISPLAYJNB P3.7,WAITRETMODE_DEL:MOV A,MODE_CONTCJNE A,#00H,MOD_1CLR LED_LOW_SETCLR LED_HI_SETCLR LED_CHECKSETB LED_NORMALRETMOD_1:CJNE A,#01H,MOD_2CLR LED_LOW_SETCLR LED_HI_SETSETB LED_CHECKCLR LED_NORMALCLR TR0RETMOD_2:CJNE A,#02H,MOD_3CLR LED_LOW_SETSETB LED_HI_SETCLR LED_CHECKCLR LED_NORMALCLR TR0RETMOD_3:SETB LED_LOW_SETCLR LED_HI_SETCLR LED_CHECKCLR LED_NORMALCLR TR0RET;-----------------------------------;----------------------------------MODE_DEC:;模式0MOV A,MODE_CONTCJNE A,#00H,MODE_DEC_1 WAIT1:LCALL DISPLAYJNB P3.6,WAIT1RETMODE_DEC_1:;模式1CJNE A,#01H,MODE_DEC_2MOV A,DS18B20_CONTCJNE A,#00H,MODE_DEC_11MOV DS18B20_CONT,#03H WAIT2:LCALL DISPLAYJNB P3.6,WAIT2RETMODE_DEC_11:DEC DS18B20_CONTWAIT3:LCALL DISPLAYJNB P3.6,WAIT3RETMODE_DEC_2:;模式2IN口CJNE A,#02H,MODE_DEC_3MOV A,DS18B20_CONTCJNE A,#00H,MODE_DEC_21DEC HI_TMP_SET_INMOV A,HI_TMP_SET_OUTJNZ MODE_DEC_DELMOV HI_TMP_SET_IN,#64H MODE_DEC_DEL:MOV TEMPER_H,HI_TMP_SET_INMOV TEMPER_L,#00HJMP MODE_DEC_RETMODE_DEC_21:;OUT口MOV A,DS18B20_CONTCJNE A,#01H,MODE_DEC_22DEC HI_TMP_SET_OUTMOV A,HI_TMP_SET_OUTJNZ MODE_DEC_RET1MOV HI_TMP_SET_OUT,#64H MODE_DEC_RET1:MOV TEMPER_H,HI_TMP_SET_OUTMOV TEMPER_L,#00HJMP MODE_DEC_RETMODE_DEC_22:;前点CJNE A,#02H,MODE_DEC_23DEC HI_TMP_SET_FRONTMOV A,HI_TMP_SET_FRONTJNZ MODE_DEC_RET2MOV HI_TMP_SET_FRONT,#64H MODE_DEC_RET2:MOV TEMPER_H,HI_TMP_SET_FRONT MOV TEMPER_L,#00HJMP MODE_DEC_RETMODE_DEC_23:;后点DEC HI_TMP_SET_BACKMOV A,HI_TMP_SET_BACKJNZ MODE_DEC_XMOV HI_TMP_SET_BACK,#64H MODE_DEC_X:MOV TEMPER_H,HI_TMP_SET_BACK MOV TEMPER_L,#00HMODE_DEC_RET:WAIT4:LCALL DISPLAYJNB P3.6,WAIT4RET;------------------------------------;-----------------------------------MODE_DEC_3:;模式3MOV A,DS18B20_CONTCJNE A,#00H,MODE_DEC_21BDEC LOW_TMP_SET_INMOV A,LOW_TMP_SET_INJNZ MODE_DEC_DELBMOV LOW_TMP_SET_IN,#64H MODE_DEC_DELB:MOV TEMPER_H,LOW_TMP_SET_IN MOV TEMPER_L,#00HJMP MODE_DEC_RETBMODE_DEC_21B:;OUT口MOV A,DS18B20_CONTCJNE A,#01H,MODE_DEC_RETBDEC LOW_TMP_SET_OUTMOV A,LOW_TMP_SET_OUTJNZ MODE_DEC_RET1BMOV LOW_TMP_SET_OUT,#64H MODE_DEC_RET1B:MOV TEMPER_H,LOW_TMP_SET_OUT MOV TEMPER_L,#00HMODE_DEC_RETB:WAIT5:LCALL DISPLAYJNB P3.6,WAIT5RET;-----------------------------------;----------------------------------MODE_ADD:MOV A,MODE_CONTCJNE A,#00H,MODE_ADD_1WAIT6:LCALL DISPLAYJNB P3.5,WAIT6RETMODE_ADD_1:;模式1CJNE A,#01H,MODE_ADD_2MOV A,DS18B20_CONTCJNE A,#03H,MODE_ADD_11MOV DS18B20_CONT,#00HWAIT7:LCALL DISPLAYJNB P3.5,WAIT7RETMODE_ADD_11:INC DS18B20_CONTWAIT8:LCALL DISPLAYJNB P3.5,WAIT8RETMODE_ADD_2:;模式2IN口CJNE A,#02H,MODE_ADD_3MOV A,DS18B20_CONTCJNE A,#00H,MODE_ADD_21INC HI_TMP_SET_INMOV A,HI_TMP_SET_OUTCJNE A,#64H,MODE_ADD_DELMOV HI_TMP_SET_IN,#00H MODE_ADD_DEL:MOV TEMPER_H,HI_TMP_SET_IN MOV TEMPER_L,#00HJMP MODE_ADD_RETMODE_ADD_21:;OUT口MOV A,DS18B20_CONTCJNE A,#01H,MODE_ADD_22INC HI_TMP_SET_OUTMOV A,HI_TMP_SET_OUTCJNE A,#64H,MODE_ADD_RET1MOV HI_TMP_SET_OUT,#00H MODE_ADD_RET1:MOV TEMPER_H,HI_TMP_SET_OUTMOV TEMPER_L,#00HJMP MODE_ADD_RETMODE_ADD_22:;前点CJNE A,#02H,MODE_ADD_23INC HI_TMP_SET_FRONTMOV A,HI_TMP_SET_FRONTCJNE A,#64H,MODE_ADD_RET2MOV HI_TMP_SET_FRONT,#00H MODE_ADD_RET2:MOV TEMPER_H,HI_TMP_SET_FRONT MOV TEMPER_L,#00HJMP MODE_ADD_RETMODE_ADD_23:;后点INC HI_TMP_SET_BACKMOV A,HI_TMP_SET_BACKCJNE A,#64H,MODE_ADD_XMOV HI_TMP_SET_BACK,#00HMODE_ADD_X:MOV TEMPER_H,HI_TMP_SET_BACKMOV TEMPER_L,#00HMODE_ADD_RET:WAIT9:LCALL DISPLAYJNB P3.5,WAIT9RET;------------------------------------;-----------------------------------MODE_ADD_3:;模式3MOV A,DS18B20_CONTCJNE A,#00H,MODE_ADD_21BINC LOW_TMP_SET_INMOV A,LOW_TMP_SET_INCJNE A,#64H,MODE_ADD_DELBMOV LOW_TMP_SET_IN,#00H MODE_ADD_DELB:MOV TEMPER_H,LOW_TMP_SET_IN MOV TEMPER_L,#00HJMP MODE_ADD_RETBMODE_ADD_21B:;OUT口MOV A,DS18B20_CONTCJNE A,#01H,MODE_ADD_RETBINC LOW_TMP_SET_OUTMOV A,LOW_TMP_SET_OUTCJNE A,#64H,MODE_ADD_RET1BMOV LOW_TMP_SET_OUT,#64H MODE_ADD_RET1B:MOV TEMPER_H,LOW_TMP_SET_OUT MOV TEMPER_L,#00HMODE_ADD_RETB:WAIT71:LCALL DISPLAYJNB P3.5,WAIT71RET;----------------------------------;----------------------------------NUM_ADD:INC DS18B20_CONTMOV A,DS18B20_CONTCJNE A,#04H,NUM_ADD_RETMOV DS18B20_CONT,#00HNUM_ADD_RET:WAIT81:LCALL DISPLAYJNB P3.5,WAIT81RET;--------------------------------DELAY;延时程序;----------------------------------DELAY5MS:MOV R1,#2;5mS延时#5D1:MOV R2,#248D2:DJNZ R2,D2DJNZ R1,D1RET;------------------------------------------10MS DELAY DELAY10MS:MOV R3,#25;10mS延时D4:MOV R4,#200D3:DJNZ R4,D3DJNZ R3,D4RET;**********DS18B20复位程序***************** INIT_18B20:SETB DQ1SETB DQ2SETB DQ3SETB DQ4NOPNOPNOPNOPCLR DQ1CLR DQ2CLR DQ3CLR DQ4MOV R0,#0FBHTSR1:DJNZ R0,TSR1;延时SETB DQ1SETB DQ2SETB DQ3SETB DQ4MOV R0,#25HTSR2:JNB DQ1,TSR3JNB DQ2,TSR3JNB DQ3,TSR3JNB DQ4,TSR3DJNZ R0,TSR2TSR3:SETB FLAG1;置标志位,表明DS18B20存在AJMP TSR5TSR4:CLR FLAG1LJMP TSR7TSR5:MOV R0,#06BHTSR6:DJNZ R0,TSR6TSR7:SETB DQ1;表明不存在RET;********************设定DS18B20暂存器设定值************** RE_CONFIG:JB FLAG1,RE_CONFIG1RETRE_CONFIG1:MOV A,#0CCH;放跳过ROM命令LCALL WRITE_18B20MOV A,#4EHLCALL WRITE_18B20;写暂存器命令MOV A,#00H;报警上限中写入00HLCALL WRITE_18B20MOV A,#00H;报警下限中写入00HLCALL WRITE_18B20MOV A,#7FH;选择12位温度分辨率LCALL WRITE_18B20RET;*****************读转换后的温度值**************** GET_TEMPER:MOV A,MODE_CONTJZ GET_NEXT;只有模式零才GETCJNE A,#02H,AARETAA:CJNE A,#03H,GET_NEXTRETGET_NEXT:SETB DQ1SETB DQ2SETB DQ3SETB DQ4LCALL INIT_18B20JB FLAG1,TSS2RET;若不存在则返回TSS2:MOV A,#0CCH;跳过ROMLCALL WRITE_18B20MOV A,#44H;发出温度转换命令LCALL WRITE_18B20LCALL INIT_18B20MOV A,#0CCH;跳过ROMLCALL WRITE_18B20MOV A,#0BEH;发出读温度换命令LCALL WRITE_18B20MOV A,DS18B20_CONTCJNE A,#00H,READ_1LCALL READ2_18B20LCALL CHANGE1MOV TMP_IN,TEMPER_HRETREAD_1:MOV A,DS18B20_CONTCJNE A,#01H,READ_2LCALL READ2_18B20_2LCALL CHANGE1MOV TMP_OUT,TEMPER_HRETREAD_2:MOV A,DS18B20_CONTCJNE A,#02H,READ_3LCALL READ2_18B20_3LCALL CHANGE1MOV TMP_FRONT,TEMPER_HRETREAD_3:LCALL READ2_18B20_4;读两个字节的温度LCALL CHANGE1MOV TMP_BACK,TEMPER_HRET;**************************************;***************写DS18B20程序************ WRITE_18B20:MOV R2,#8CLR CWR1:CLR DQ1CLR DQ2CLR DQ3CLR DQ4MOV R3,#6DJNZ R3,$RRC AMOV DQ1,CMOV DQ2,CMOV DQ3,CMOV DQ4,CMOV R3,#23DJNZ R3,$SETB DQ1SETB DQ2SETB DQ3SETB DQ4NOPDJNZ R2,WR1SETB DQ1SETB DQ2SETB DQ3SETB DQ4RET;***********读18B20程序,读出两个字节的温度*********READ2_18B20:MOV R4,#2;低位存在29H,高位存在TEMPER_H MOV R1,#TEMPER_LRE00:MOV R2,#8RE01:CLR CSETB CNOPNOPCLR DQ1NOPNOPSETB DQ1MOV R3,#7DJNZ R3,$MOV C,DQ1MOV R3,#23DJNZ R3,$RRC ADJNZ R2,RE01MOV@R1,ADEC R1DJNZ R4,RE00RET;***********读18B20_2程序,读出两个字节的温度********* READ2_18B20_2:MOV R4,#2;低位存在29H,高位存在TEMPER_H MOV R1,#TEMPER_LRE001:MOV R2,#8RE012:CLR CSETB CNOPCLR DQ2NOPNOPNOPSETB DQ2MOV R3,#7DJNZ R3,$MOV C,DQ2MOV R3,#23DJNZ R3,$RRC ADJNZ R2,RE012MOV@R1,ADEC R1DJNZ R4,RE001RET;***********读18B20_3程序,读出两个字节的温度********* READ2_18B20_3:MOV R4,#2;低位存在29H,高位存在TEMPER_H MOV R1,#TEMPER_LRE002:MOV R2,#8RE013:CLR CSETB CNOPNOPCLR DQ3NOPNOPNOPSETB DQ3MOV R3,#7DJNZ R3,$MOV C,DQ3MOV R3,#23DJNZ R3,$RRC ADJNZ R2,RE013MOV@R1,ADEC R1DJNZ R4,RE002RET;***********读18B20_3程序,读出两个字节的温度********* READ2_18B20_4:MOV R4,#2;低位存在29H,高位存在TEMPER_H MOV R1,#TEMPER_LRE003:MOV R2,#8RE014:CLR CSETB CNOPNOPCLR DQ4NOPNOPNOPSETB DQ4MOV R3,#7DJNZ R3,$MOV C,DQ4MOV R3,#23DJNZ R3,$RRC ADJNZ R2,RE014MOV@R1,ADEC R1DJNZ R4,RE003RET;************读出的温度进行数据转换**************CHANGE1:MOV A,MODE_CONTJZ CHANGE1_NEXT;只有模式零和1才GETCJNE A,#02H,BBRETBB:CJNE A,#03H,CHANGE1_NEXTRETCHANGE1_NEXT:MOV A,TEMPER_LANL A,#0FHMOV B,#6HMUL ABMOV R0,AMOV A,TEMPER_LMOV C,TEMPER_H.0;将TEMPER_H中的最低位移入C RRC AMOV C,TEMPER_H.1RRC AMOV C,TEMPER_H.2RRC AMOV C,TEMPER_H.3RRC AMOV TEMPER_H,AMOV TEMPER_L,R0RET;***********************************D1MS:MOV R7,#80;1MS延时(按12MHZ算)DJNZ R7,$RET;*************************TAB:DB0C0H,0F9H,0A4H,0B0H,99H,92H,82H,0F8H,80H,90HEND;DB3FH,06H,5BH,4FH,66H,6DH,7DH,07H,7FH,6FH,77H,7CH,39H,5EH,79H,71H,0H;共阴极LED;END。
#DS18B20多点测温(51_C程序)
DS18B20多点测温<读序列,匹配序列,51 C程序,1602显示)因为本人在前两天找DS18B20多点测温<51C程序),网上下载了很多,但是都不是很理想,后来,自己总结前人的知识,重新写了这个程序。
其中包括程序一:单个读序列号。
程序二,匹配并且读两个DS18B20,当然,读多个与读两个基本原理一样,只要加上其序列号等即可。
本程序所有显示都是用LCD160 2显示。
程序一:度序列号,并用1602显示,1602从左到右分别是低到高位。
#include<reg51.h>#define uchar unsigned char#define uint unsigned intsbit DQ=P3^7。
//ds18b20与单片机连接口sbit RS=P3^0。
sbit RW=P3^1。
sbit EN=P3^2。
unsigned char code str1[]={""}。
unsigned char code str2[]={" "}。
uchar fCode[8]。
uchar data disdata[5]。
uint tvalue。
//温度值uchar tflag。
//温度正负标志/*************************lcd1602程序**************************/void delay1ms(unsigned int ms>//延时1毫秒<不够精确的){unsigned int i,j。
for(i=0。
i<ms。
i++>for(j=0。
j<100。
j++>。
}void wr_com(unsigned char com>//写指令//{ delay1ms(1>。
RS=0。
RW=0。
EN=0。
P2=com。
delay1ms(1>。
EN=1。
delay1ms(1>。
DS18B20测温程序
DS18B20测温程序(数码显示)*;************************************************************************** ;*接线方法: *;* 1、用一8P的数据线,一头插在J1,另一头插在J5,接通数码管的段选*;* 2、用一8P的数据线,一头插在J4,另一头插在J6,接通数码管的位选*;* 3、将DS18B20插在主机上的测温部份 *;* 4、用一根单根的数据线,一头插在DS18B20所在数据插针,另一头插到P2.7 * ;**************************************************************************TEMPER_L EQU 36H ;从DS18B20中读回高位,低位暂存区TEMPER_H EQU 35H ;TEMPER_NUM EQU 60H;温度值存储TEMPER_GE EQU 61HTEMPER_SHI EQU 62HTEMPER_SAVE EQU 63HFLAG1 BIT 00HFLAG2 BIT 01HRS BIT p3.0;液晶控制接口RW BIT p3.1E BIT p3.2DQ BIT P2.7;单总线口ORG 0000HA JMP MAINORG 0030HMAIN: MOV SP,#70HLCALL GET_TEMPERLCALL TEMPER_COVLCALL DISPLAYLJMP MAINNOP;**************************************************;读出转换后的温度值;**************************************************GET_TEMPER:SETB DQ ; 定时入口BCD: LCALL INIT_1820JB FLAG1,S22LJMP BCD ;若DS18B20不存在则返回S22: LCALL DELAY1MO V A,#0CCH ; 跳过ROM匹配------0CC命令LCALL WRITE_1820MOV A,#44H ; 发出温度转换命令LCALL WRITE_1820LCALL DELAYCBA CALL INIT_1820JB FLAG1,ABCLJMP CBAABC CALL DELA Y1MOV A,#0CCH ; 跳过ROM匹配LCALL WRITE_1820MOV A,#0BEH ; 发出读温度命令LCALL WRITE_1820LCALL READ_18200 ;READ_1820RET;************************************************************** ;读DS18B20的程序,从DS18B20中读出一个字节的数据;************************************************************** READ_1820:MOV R2,#8RE1:CLR CSETB DQNOPNOPCLR DQNOPNOPNOPSETB DQMOV R3,#7DJNZ R3,$MOV C,DQMOV R3,#23DJNZ R3,$RRC ADJNZ R2,RE1RET;******************************************************;写DS18B20的程序;******************************************************WRITE_1820:MOV R2,#8CLR CWR1:MOV R3,#6DJNZ R3,$RRC AMOV DQ,CMOV R3,#23DJNZ R3,$SETB DQNOPDJNZ R2,WR1SETB DQRET;****************************************************;读DS18B20的程序,从DS18B20中读出两个字节的温度数据;****************************************************READ_18200:MOV R4,#2 ; 将温度高位和低位从DS18B20中读出MOV R1,#36H ; 低位存入36H(TEMPER_L),高位存入35H(TEMPER_H) RE00:MOV R2,#8RE01:CLR CSETB DQNOPNOPCLR DQNOPNOPNOPSETB DQMOV R3,#7DJNZ R3,$MOV C,DQMOV R3,#23DJNZ R3,$RRC ADJNZ R2,RE01MOV @R1,ADEC R1DJNZ R4,RE00RET;;****************************************************;将从DS18B20中读出的温度数据进行转换;;****************************************************TEMPER_COV:MOV A,#0F0HANL A,TEMPER_L ; 舍去温度低位中小数点后的四位温度数值SWAP AMOV TEMPER_NUM,A ;得到低四位MOV A,TEMPER_LJNB ACC.3,TEMPER_COV1 ; 四舍五入去温度值INC TEMPER_NUMTEMPER_COV1:MOV A,TEMPER_HANL A,#07HSWAP AORL A,TEMPER_NUM ;得到高四位,再与低四位相或得到值MOV TEMPER_NUM,A ; 保存变换后的温度数据LCALL BIN_BCDRET;;**************************************************** ;将16进制的温度数据转换成压缩BCD码;;**************************************************** BIN_BCD:MOV A,TEMPER_NUMMOV B,#10DIV ABMOV TEMPER_SHI,AMOV TEMPER_GE,BMOV A,TEMPER_SAVECJNE A,TEMPER_GE,ZWFHRET:MOV TEMPER_SAVE,TEMPER_GERETZW:CALL LCDDISPAJMP FHRET;**************************************************** ;DS18B20初始化程序;;**************************************************** INIT_1820:SETB DQNOPCLR DQMOV R0,#250TSR1:DJNZ R0,TSR1 ; 延时520usSETB DQMOV R0,#25H ;96US-25HTSR2:DJNZ R0,TSR2JNB DQ,TSR3;如D0为低则复位成功,DS18B20存在LJMP TSR4 ; 延时TSR3:SETB FLAG1 ; 置标志位,表示DS1820存在LJMP TSR5TSR4:CLR FLAG1 ; 清标志位,表示DS1820不存在LJMP TSR7TSR5:MOV R0,#06BH ;200USTSR6:DJNZ R0,TSR6 ; 延时TSR7:SETB DQ ;拉高总线RET;************************************************* ;数码显示程序;************************************************* Display:MOV DPTR,#disptabMOV A,TEMPER_GEMOVC A,@A+DPTRMOV P1,ACLR P2.2CALL DELAYCALL DELAYSETB P2.2MOV DPTR,#disptabMOV A,TEMPER_SHIMOVC A,@A+DPTRMOV P1,ACLR P2.3CALL DELAYCALL DELAYSETB P2.3RET;************************************************* ;液晶显示程序;*************************************************mov p0,#01h;清屏call enrwmov p0,#38h;设为8位,5*7字型两行 call enrwmov p0,#0Chcall enrwmov p0,#06hcall enrwmov p0,#80hcall enrwmov dptr,#yjtabcall rwrammov p0,#0C0hcall enrwmov dptr,#yjtab1call rwramW_TEM:mov p0,#0CChcall enrwMO V DPTR,#ASCIIMO V A,TEMPER_SHIMO VC A,@A+DPTRMO V P0,Asetb rsclr rwclr ecall delaysetb eMO V DPTR,#ASCIIMO V A,TEMPER_GEMO VC A,@A+DPTRMO V P0,Asetb rsclr rwclr ecall delaysetb eRE Tenrw:clr rsclr rwclr esetb eretrwram:mov r1,#00ha1: mov a,r1movc a,@a+dptrcall rwram2inc r1cjne a,#00h,a1retrwram2:mov p0,asetb rsclr rwclr ecall delaysetb eret;*************************************************;延时子程序;*************************************************DELAY:MOV R6,#250;延时500usDJNZ R6,$RETDELAY1:MOV R7,#20HDJNZ R7,$RETdisptab:db 0C0H,0F9H,0A4H,0B0H,99H,92H,82H,0F8H,80H,90H;字形代码表 ;0 1 2 3 4 5 6 7 8 9yjtab: db 'HTTP// ',00hyjtab1:db 'CHENZHOU_TE:**`C',00hASCII: DB 30H,31H,32H,33H,34H,35H,36H,37H,38H,39Hend。
ds18b20温度计程序
ORG 0000HAJMP MAINORG 0030HMAIN: MOV R5,#0FFHMAIN1:MOV P0,#00H ;系统自检。
自高位向低位带小数点显示8扫描256次CLR P2.4LCALL DELAYSETB P2.4CLR P2.5LCALL DELAYSETB P2.5CLR P2.6LCALL DELAYSETB P2.6CLR P2.7LCALL DELAYSETB P2.7DJNZ R5,MAIN1SETB P2.4 ;关显示SETB P2.5SETB P2.6SETB P2.7SJMP MAIN2DELAY:MOV R7 ,#05H //;延时LP8: MOV R6,#19HLP7:DJNZ R6,LP7DJNZ R7,LP8RET; DS18B20初始化汇编程序;*****************************************//MAIN2:LCALL DISP //;主程序SETB P3.2 // ;18B20DQ置1拉高LCALL INIT // ;调初始化MOV A,#0CCH //;跳过ROM匹配------0CCLCALL WRITE // ;调写DS18B20的程序MOV A,#44H // ;发出温度转换命令LCALL WRITE // ;调写DS18B20的程序MOV R6,#34H //;延时136微秒转换时间,写一个字约需70微秒。
DJNZ R6,$LCALL DISPLCALL INITMOV A,#0CCHLCALL WRITEMOV A,#0BEH // ;发出读温度命令LCALL WRITELCALL READCLR CLCALL CONVTEMPLCALL DISPBCDLCALL DISPSJMP MAIN2WRITE:MOV R0,#8 // ;写子程序CLR CWR1: CLR P3.2MOV 20H,#3 // ;延时17微秒DJNZ 20H,$RRC AMOV P3.2,CMOV 21H,#10 // ;发送后延时45微秒DJNZ 21H,$SETB P3.2NOPDJNZ R0,WR1 // ;8位未发送完转SETB P3.2RETREAD: MOV R6,#2 // ;读子程序CLR PSW.5 // ;清清标志F0RE0:MOV R2,#8RE1:CLR CSETB P3.2 // ;拉高DQNOP // ;延时2微秒CLR P3.2 // ;拉低DQSETB P3.2MOV 22H,#3RE2:DJNZ 22H,RE2MOV C,P3.2MOV 23H,#10RE3:DJNZ 23H,RE3RRC ADJNZ R2,RE1 //;8位未读完继续读CPL PSW.5JNB PSW.5,RE4 // ;高8位保存至28HMOV 29H,A // ;低8位及小数保存至29HRE4:MOV 28H,ADJNZ R6,RE0 //;高8位未读继续RETINIT:SETB P3.2 // ;初始化开始DQ置1(整个时隙和理论值不是很准确)NOP //;延时L0:CLR P3.2 // ;DQ拉低MOV 24H,#100 // ;延时400微秒DJNZ 24H,$SETB P3.2 // ;DQ拉高MOV 25H,#10 // ;置40微秒延时常数L01:JNB P3.2,L2 // ;有18B20响应转L2DJNZ 25H,L01 // ;无18B20响应等待40微秒SJMP L0 // ;无18B20重新初始化L2:MOV R7,#60 // ,延时240微秒L3:DJNZ R7,L3SETB P3.2 //;DQ拉高、退出RETCONVTEMP:MOV A,28H //;温度转换ANL A,#80H //;温度正负判别JZ TEMPC1 //;温度为正转CLR C // ;温度为负调整MOV A,29HCPL AADD A,#01HMOV 29H,AMOV A,28HCPL AADDC A,#00HMOV 28H,AMOV 26H,#0BH // ;温度为负26H内送#0BHSJMP TEMPC11TEMPC1:MOV 26H,#0AH //;温度为正26H内送#0AHTEMPC11:MOV A,26HSWAP AMOV 26H,A // ;26H高4位为温度符号MOV A,29H // ;取温度小数部分ANL A,#0FH ;去整数个位MOV DPTR,#DOTTABMOVC A,@A+DPTRMOV 27H,A // ;查表得小数值,并保存至27H单元MOV A,29H // ;温度整数部分拼装后暂时存入AANL A,#0F0H // ;留下整数个位SWAP AMOV 29H,AMOV A,28HANL A,#0FHSWAP AHEX2BCD1:MOV B,#64H // ;温度整数部分除100得整数百位,并存入R7中DIV ABMOV R7,A // ;R7中为百位,B中为十位和个位MOV A,#0AH // ;温度整数部分除10得整数十位和个位XCH A,B // ;除数与被除数交换DIV ABSWAP AORL A,BTEMPC10:MOV 29H,A // ;温度十位和个位存入29H单元中,十位在高4位,个位在低4位ANL A,#0F0H // ;取温度十位SWAP AORL A,26H //;十位加温度符号存入26H单元;高4位为符号MOV 26H,AMOV A,29HANL A,#0FH // ;取温度个位SWAP AORL A,27HMOV 27H,A // ;27H单元中高4位为个位,低4位为小数MOV A,R7JZ TEMPC12 // ;百位为0退出ANL A,#0FH // ;百位不为0即温度为正和十位重新拼装后存入26H,高4位为百位SWAP A // ;MOV R7,AMOV A,26HANL A,#0FH ; // ;去除26H单元的符号ORL A,R7 //;百位和十位拼装,放入26H单元高4位为百位MOV 26H,A // ;低4位为十位TEMPC12:RETDOTTAB:DB 00H,01H,01H,02H,03HDB 03H,04H,04H,05H,06HDB 06H,07H,08H,08H,09H,09HDISPBCD:MOV A,27H // ;BCD码转换ANL A,#0FHMOV 70H,A // ;取小数,并保存在70H中SWAP AANL A,#0FHMOV 71H,A // ;取整数个位,并保存在71H中MOV A,26HANL A,#0FHMOV 72H,A //;取整数十位,并保存在72H中MOV A,26HSWAP AANL A,#0FHMOV 73H,A // ;取整数百位,并保存在73H中MOV A,72H //;取整数十位ANL A,#0F0HCJNE A,#00H,DISPBCD2SJMP DISPBCD2DISPBCD0:MOV A,26H // ;取整数百位ANL A,#0F0HCJNE A,#00H,DISPBCD2 //;百位不等于0退出MOV A,26HSW AP AANL A,#0FH //;十位保留符号MOV 73H,#0AHMOV 72H,ADISPBCD2:RETDISP:MOV R1,#70H // ;显示子程序MOV R5,#11101111B // ;送Y4位码PLAY:MOV P0,#0FFH // ;关段码MOV A,R5 // ;取Yn位码MOV P2,A // ;送位码MOV A,@R1 //;取段码MOV DPTR,#TABMOVC A,@A+DPTRMOV P0,A // ;送段码MOV A,R5JB ACC.5,LOOP1 // ;位码未指向Y2(整数个位)转CLR P0.7 ;;开小数点LOOP1:LCALL DL1MS //;调显示延时INC R1 // ;指向下一位显示段码MOV A,R5 ;取显示位码JNB ACC.7,ENDOUTRL A // ;向下一位位码MOV R5,AAJMP PLAYENDOUT:MOV P0,#0FFHMOV P3,#0FFHRETTAB: DB 0C0H,0F9H,0A4H,0B0HDB 99H,92H,82H,0F8HDB 80H,90H,0FFH,0BFHDL1MS:MOV R6,#14H // ;延时1mS DL1: MOV R7,#19HDL2: DJNZ R7,DL2DJNZ R6,DL1RETEND。
18B20温度传感器温度计程序
18B20温度传感器温度计程序2008-9-261.实验任务本实验实现的是通过18B20温度传感器读回温度并在6位数码管上显示。
精度为,范围为2.实验目的学会使用单片机控制18B20此类单总线器件。
原理及引脚介绍DS18B20数字温度计是DALLAS公司生产的1-Wire,即单总线器件,具有线路简单,体积小的特点。
因此用它来组成一个测温系统,具有线路简单,在一根通信线,可以挂很多这样的数字温度计,十分方便。
DS18B20产品的特点(1)、只要求一个端口即可实现通信。
(2)、在DS18B20中的每个器件上都有独一无二的序列号。
(3)、实际应用中不需要外部任何元器件即可实现测温。
(4)、测量温度范围在-55。
C到+125。
C之间。
(5)、数字温度计的分辨率用户可以从9位到12位选择。
(6)、内部有温度上、下限告警设置。
TO-92封装的DS18B20的引脚排列见下图,其引脚功能描述见下:1.GND地信号2.DQ数据输入/输出引脚。
开漏单总线接口引脚。
当被用着在寄生电源下,也能够向器件提供电源。
3.VDD可选择的VDD引脚。
当工作于寄生电源时,此引脚必需接地。
18B20管脚图4.实验原理图实验原理图5. 18B20操纵命令字指令说明读ROM(33H) 读18B20的序列号匹配ROM(55H) 继续读完64位序列号的命令,用于多个18B20时定位跳过ROM(CCH) 此命令执行后的在存储器打操作针对在线所有18B20 搜ROM(F0H) 识别总线上各器件的编码,为操作各器件做准备报警搜索(ECH) 公温度越限的器件对此命令作出响应指令说明温度转换(44H) 启动在线18B20做温度AD转换读数据(BEH) 从高速暂存器读9位温度值和CRC值写数据(4EH) 将数据写入高速暂存的第3和第4字节中复制(48H) 将高速暂存器中第3和第4字节复制到EERAM读EERAM(B8H) 将EERAM内容写入高速暂存器中第3和第4字节读电源供电方式(B4H) 了解18B20的供电方式6. 实验源程序WENDU_L EQU 29H;用于保留读出温度的低字节WENDU_H EQU 28H;用于保留读出温度的高字节XIAOSHU EQU 27H;用于保留温度的小数部份ZHENGSHU EQU 26H;用于保留整数部份BIAOZHI BIT 50H;18B20检查位1为存在,0为不存在ORG 0000HAJMP MAINORG 0030HMAIN:MOV SCON,#00HACALL DUWENACALL ZHENGHEACALL BCDACALL DISPACALL TIME1AJMP MAIN;---------------------------------------------------------------------------------------------------------------------------------------- ;读温度子程序;---------------------------------------------------------------------------------------------------------------------------------------- DUWEN:SETBACALL FUWEI ;读温度之前必需先复位JB BIAOZHI,CUNZAI;查看标志位看18B20是不是存在,1为存在,0为不存在RET ;不存在那么返回CUNZAI: ;存在那么开始读温度MOV A,#0CCH ;跳过ROM匹配ACALL XIE ;调写子程序MOV A,#44H ;发出温度转换命令ACALL XIE ;调写子程序ACALL TIME1 ;调1秒延时,等等AD转换完成,此刻分辨率为12位,温度最大转换时刻为750MSACALL FUWEI ;读温前需要复位MOV A,#0CCH ;跳过ROM匹配ACALL XIEMOV A,#0BEH ;发读温度命令ACALL XIEACALL DUSHU ;将闱出数据读回CLRRET;------------------------------------------------------------------------------------------------------------------------------;复位子程序;18B20复位需要将数据位拉低500us;18B20收到信号后要等待16-60us,然后发出60-240us的低脉冲;------------------------------------------------------------------------------------------------------------------------------- FUWEI:SETBNOPCLRMOV R0,#3INTE:MOV R1,#107 ;设一个537us延时KK1: DJNZ R1,KK1DJNZ R0,INTESETB ;拉高数据线,等待回应NOPNOPNOPMOV R0,#25 ;INTE1:JNB ,INTE2 ;延时延时50us等待18B20回应,假设返回低脉冲那么说明18B20存在DJNZ R0 ,INTE1AJMP INTE3 ;通过反映时刻而没检测到18B20的存在,那么跳转去清零标志位INTE2:SETB BIAOZHI ;检测到18B20存在,置1标志位CLRAJMP INTE4INTE3:CLR BIAOZHI ;没检测到18B20,清零标志位AJMP INTE5INTE4:MOV R0,#120 ;延时240us,确定回应信号已发完KK: DJNZ R0,KKINTE5:SETBRET;---------------------------------------------------------------------------------------------------------------------------------------- ;写18B20子程序;----------------------------------------------------------------------------------------------------------------------------------------- XIE:MOV R2,#8 ;写计数寄放器,一共有8位数据CLR CLP:CLRMOV R3,#6 ;设一个延时LL1:DJNZ R3,LL1RRC A ;右循环,先输出低位MOV ,CMOV R3,#23 ;设延时LL: DJNZ R3,LL ;SETBNOPNOPDJNZ R2,LP ;判定是不是完成数据传送SETB ;完成传送拉高数据位RET;----------------------------------------------------------------------------------------------------------------------------------------- ;从18B20中读出温度数据子程序;-----------------------------------------------------------------------------------------------------------------------------------------DUSHU:MOV R4,#2 ;设读回数据个数指针MOV R1,#WENDU_L ;把温度数据低位存入29HRE: MOV R2,#8 ;设数据长度指针RE1: CLR CSETBNOPNOP CLRNOPNOPNOPSETBMOV R3,#9 DJNZ R3,$ MOV C, MOV R3,#23NN: DJNZ R3,NNRRC ADJNZ R2,RE1MOV @R1,A DEC R1 ;高位存入28H DJNZ R4,RERET;---------------------------------------------------------------------------------------------------------------------------------;数据整合子程序;温度源数据的整合,读出数据的高字节的低四位决定温度的整数部份;低字节的低四位决定小数部份;----------------------------------------------------------------------------------------------------------------------------- ZHENGHE:MOV A,#0FHANL A,WENDU_L ;低字节的低四位就是小数部分MOV XIAOSHU,A ;取得小数部份MOV A,WENDU_L ;将高字节的低四位移入低字节的高4位,MOV C,40H ;获得的新字节就是整数部分的数据RRC AMOV C,41HRRC AMOV C,42HRRC AMOV C,43HRRC AMOV ZHENGSHU,ARET;----------------------------------------------------------------------------------------------------------------------------------------- ;显示数据拆解程序、显示程序、延时程序;----------------------------------------------------------------------------------------------------------------------------------------;数据拆解程序BCD:MOV A,ZHENGSHU MOV B,#10DIV ABMOV 50H,AMOV 51H,BMOV A,XIAOSHUMOV R0,#52HMOV R2,#4D0:MOV B,#10MUL ABMOV B,#16DIV ABMOV @R0,AINC R0MOV A,BDJNZ R2,D0RET ;----------------------------------- ;显示程序;---------------------------------- DISP:ACALL TIMEMOV R7,#6MOV DPTR,#TABMOV R0,#55HLP1:MOV A ,@R0;MOVC A,@A+DPTRCJNE R7,#2,NE1ANL A,#07FHNE1:MOV SBUF,AJNB TI ,$CLR TIDEC R0DJNZ R7,LP1RET;---------------------------------------- ;延时程序;---------------------------------------- TIME1:MOV R6,#4LOOP2:MOV R5,#250LOOP1:ACALL D1MSDJNZ R5,LOOP1DJNZ R6,LOOP2RETTIME:MOV R6,#200LOOP3:ACALL D1MSDJNZ R6,LOOP3RETD1MS:MOV R7,#250LOOP0:NOPNOPNOPDJNZ R7,LOOP0RETTAB:DB 0C0H,0F9H,0A4H,0B0H DB 99H, 92H, 82H, 0F8HDB 80H, 90H, 88H, 83HDB 0C6H,0A1H,86H, 8EHDB 0FFHEND。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
本程序为ds18b20的多路温度采集程序,是我自己参考其他程序后改写而成,可显示4路正负温度值,并有上下限温度报警(声音、灯光报警)。
亲测,更改端口即可使用。
(主要器件:51单片机,ds18b20,lcd显示器)附有proteus仿真图,及序列号采集程序/****上限62度下限-20度****/#include<reg51.h>#define uchar unsigned char#define uint unsigned intsbit ds=P1^1;sbit rs=P1^4;sbit e=P1^6;sbit sp=P1^0;sbit d1=P1^2;sbit d2=P1^3;uchar lcdrom[4][8]={{0x28,0x30,0xc5,0xb8,0x00,0x00,0x00,0x8e}, {0x28,0x31,0xc5,0xb8,0x00,0x00,0x00,0xb9},{0x28,0x32,0xc5,0xb8,0x00,0x00,0x00,0xe0},{0x28,0x33,0xc5,0xb8,0x00,0x00,0x00,0xd7}}; unsigned char code table0[]={"TEMPERARTURE:U "}; unsigned char code table1[]={"0123456789ABCDEF"};int f[4];int tvalue;float ftvalue;uint warnl=320;uint warnh=992;/****lcd程序****/void delayms(uint ms)//延时{uint i,j;for(i=ms;i>0;i--)for(j=110;j>0;j--);void wrcom(uchar com)//写指令{delayms(1);rs=0;P3=com;delayms(1);e=1;delayms(1);e=0;}void wrdat(uchar dat)//写数据{rs=1;e=0;P3=dat;delayms(5);e=1;delayms(5);e=0;}void lcdinit()//初始化lcddelayms(15);wrcom(0x38);delayms(5);wrcom(0x0c);delayms(5);wrcom(0x06);delayms(5);wrcom(0x01);delayms(5); }void display(uchar *p)//显示{while(*p!='\0'){wrdat(*p);p++;delayms(1);}}displayinit()//初始化显示{lcdinit();wrcom(0x80);display(table0);}/****ds18b20程序****/ void dsrst()//ds18b20复位{uint i;ds=0;i=103;while(i>0)i--;ds=1;i=4;while(i>0)i--;}bit dsrd0()//读一位数据{uint i;bit dat;ds=0;i++;ds=1;i++;i++;dat=ds;i=8;while(i>0)i--;return(dat);uchar dsrd()//读1个字节数据{uchar i,j,dat;dat=0;for(i=8;i>0;i--){j=dsrd0();dat=(j<<7)|(dat>>1);}return(dat);}void dswr(uchar dat)//写数据{uint i;uchar j;bit testb;for(j=8;j>0;j--){testb=dat&0x01;dat=dat>>1;if(testb){ds=0;i++;i++;ds=1;i=8;while(i>0)i--;}else{ds=0;i=8;while(i>0)i--;ds=1;i++;i++;}}}void tmstart()//初始化ds18b20 {sp=1;d1=1;d2=1;dsrst();delayms(1);dswr(0xcc);dswr(0x44);}void read_dealtemp()//读取并处理温度{uchar i,j,t;uchar a,b;for(j=0;j<4;j++){dsrst();delayms(1);dswr(0x55);for(i=0;i<8;i++){dswr(lcdrom[j][i]);//发送64位序列号}dswr(0xbe);a=dsrd();b=dsrd();tvalue=b;tvalue<<=8;tvalue=tvalue|a;if(tvalue<0){d1=1;tvalue=~tvalue+1;wrcom(0xc0);wrdat(0x2d);if(tvalue>warnl){d2=0;sp=0;}else{d2=1;sp=1;}}else{d2=1;wrcom(0xc0);wrdat(' ');if(tvalue>warnh){d1=0;sp=0;}else{d1=1;sp=1;}}if(j==0){wrcom(0x8e); wrdat('2');}if(j==1){wrcom(0x8e);wrdat('3');}if(j==2){wrcom(0x8e);wrdat('4');}if(j==3){wrcom(0x8e);wrdat('5');}ftvalue=tvalue*0.0625;tvalue=ftvalue*10+0.5;ftvalue=ftvalue+0.05;f[j]=tvalue;//温度扩大十倍,精确到一位小数tvalue=f[j];t=tvalue/1000;wrcom(0x80+0x41);wrdat(table1[t]);//显示百位t=tvalue%1000/100;wrdat(table1[t]);//显示十位t=tvalue%100/10;wrdat(table1[t]);//显示个位wrdat(0x2e); //显示小数点儿t=tvalue%10/1;wrdat(table1[t]);//显示小数位delayms(5000);}}/****主函数****/void main(){d1=1;d2=1;sp=1;displayinit();//初始化显示while(1){tmstart();//初始化read_dealtemp();//读取温度}}/****序列号读取程序****/#include <reg52.h>#define uchar unsigned char#define uint unsigned intsbit DQ = P1^1; //温度传感器信号线sbit rs = P1^4; //LCD数据/命令选择端(H/L)位声明sbit lcden = P1^6; //LCD使能信号端位声明void delay(uint z); //延时函数void DS18B20_Reset(void); //DQ18B20复位,初始化函数bit DS18B20_Readbit(void); //读1位数据函数uchar DS18B20_ReadByte(void); //读1个字节数据函数void DS18B20_WriteByte(uchar dat); //向DQ18B20写一个字节数据函数void LCD_WriteCom(uchar com); //1602液晶命令写入函数void LCD_WriteData(uchar dat); //1602液晶数据写入函数void LCD_Init(); //LCD初始化函数void Display18B20Rom(char Rom); //显示18B20序列号函数/**********************************************//* 主函数 *//**********************************************/void main(){ uchar a,b,c,d,e,f,g,h;LCD_Init();DS18B20_Reset();delay(1);DS18B20_WriteByte(0x33);delay(1);a = DS18B20_ReadByte();b = DS18B20_ReadByte();c = DS18B20_ReadByte();d = DS18B20_ReadByte();e = DS18B20_ReadByte();f = DS18B20_ReadByte();g = DS18B20_ReadByte();h = DS18B20_ReadByte();LCD_WriteCom(0x80+0x40);Display18B20Rom(h);Display18B20Rom(g);Display18B20Rom(f);Display18B20Rom(e);Display18B20Rom(d);Display18B20Rom(c);Display18B20Rom(b);Display18B20Rom(a);while(1);}/***************************************************//* 延时函数:void delay() *//* 功能:延时函数*//***************************************************/void delay(uint z)//延时函数{uint x,y;for( x = z; x > 0; x-- )for( y = 110; y > 0; y-- );}/***************************************************//* DS18B20函数:void DS18B20_Reset() *//* 功能:复位18B20 *//***************************************************/void DS18B20_Reset(void)//DQ18B20复位,初始化函数{uint i;DQ = 0;i = 103;DQ = 1;i = 4;while( i > 0 ) i--;}/***************************************************//* DS18B20函数:void DS18B20_Readbit() *//* 功能:读1个字节数据函数*//***************************************************/bit DS18B20_Readbit(void) //读1位数据函数{uint i;bit dat;DQ = 0;i++; //i++起延时作用DQ = 1;i++;i++;dat = DQ;i = 8;return( dat );}/***************************************************//* DS18B20函数:void DS18B20_ReadByte() *//* 功能:读1个字节数据函数*//***************************************************/uchar DS18B20_ReadByte(void) //读1个字节数据函数{uchar i,j,dat;dat = 0;for( i = 1; i <= 8; i++ ){j = DS18B20_Readbit();dat = ( j << 7 ) | ( dat >> 1 );}return(dat);}/***************************************************//* DS18B20函数:void DS18B20_WriteByte() *//* 功能:向DQ18B20写一个字节数据函数*//***************************************************/void DS18B20_WriteByte(uchar dat) //向DQ18B20写一个字节数据函数{uint i;uchar j;bit testb;for( j=1; j<=8; j++){testb = dat&0x01;dat= dat>>1;if(testb) //写1{DQ = 0;i++;i++;DQ = 1;i = 8;while(i>0)i--;}else{DQ = 0; //写0i = 8;while(i>0)i--;DQ = 1;i++;i++;}}}/***********************************************//* LCD函数:void LCD_WriteCom() *//* 功能:向LCD写入命令*//***********************************************/void LCD_WriteCom(uchar com){rs = 0;P3= com;delay(5);lcden = 0;delay(5);lcden = 1;delay(5);lcden = 0;}/***********************************************//* LCD函数:void LCD_WriteData(uchar dat) *//* 功能:向LCD写入数据*//***********************************************/void LCD_WriteData(uchar dat){rs = 1; //选择LCD为写入数据状态lcden = 0;P3= dat; //将待写入数据放到总线上delay(5);lcden = 1; //给LCD使能端一个脉冲delay(5); //信号将之前放到总线上lcden = 0; //的数据写入LCDdelay(5);}/***********************************************//* LCD函数:void LCD_Init() *//* 功能:初始化LCD,设定LCD的初始状态*//***********************************************/void LCD_Init(){LCD_WriteCom(0x38); //LCD显示模式设定delay(15);LCD_WriteCom(0x08); //关闭LCD显示delay(3);LCD_WriteCom(0x01); //LCD显示清屏delay(3);LCD_WriteCom(0x06); //设定光标地址指针为自动加1delay(3);LCD_WriteCom(0x0c); //打开LCD显示,但不显示光标}/**********************************************//* *//* 显示18B20序列号 */ /* *//**********************************************/void Display18B20Rom(char Rom){uchar h,l;l = Rom & 0x0f; //取低4位h = Rom & 0xf0; //取高4位h >>= 4;if( ( h >= 0x00 )&&( h <= 0x09 ) )LCD_WriteData(h+0x30); //取ASCII码 elseLCD_WriteData(h+0x37); //取ASCII码if( ( l >= 0x00 )&&( l <= 0x09 ) )LCD_WriteData(l+0x30); //取ASCII码 elseLCD_WriteData(l+0x37); //取ASCII码}。