FANUC数控系统常用M代码:
FANUC数控标准系统常用M代码
FANUC数控系统常用M代码:M03:主轴正传M04:主轴反转M05:主轴停止M07:雾状切削液开M08:液状切削液开M09:切削液关M00:程序暂停M01:计划停止M02:机床复位M30:程序结束,指针返回到开头M98:调用子程序M99:返回主程序FANUC数控系统G代码:代码名称------功能简述G00------快速定位G01------直线插补G02------顺时针方向圆弧插补G03------逆时针方向圆弧插补G04------定时暂停G05------通过中间点圆弧插补G07------Z 样条曲线插补G08------进给加速G09------进给减速G20------子程序调用G22------半径尺寸编程方式G220-----系统操作界面上使用G23------直径尺寸编程方式G230-----系统操作界面上使用G24------子程序结束G25------跳转加工G26------循环加工G30------倍率注销G31------倍率定义G32------等螺距螺纹切削,英制G33------等螺距螺纹切削,公制G53,G500-设定工件坐标系注销G54------设定工件坐标系一G55------设定工件坐标系二G56------设定工件坐标系三G57------设定工件坐标系四G58------设定工件坐标系五G59------设定工件坐标系六G60------准确路径方式G64------连续路径方式G70------英制尺寸寸G71------公制尺寸毫MG74------回参考点(机床零点)G75------返回编程坐标零点G76------返回编程坐标起始点G81------外圆固定循环G331-----螺纹固定循环G90------绝对尺寸G91------相对尺寸G92------预制坐标G94------进给率,每分钟进给G95------进给率,每转进给功能详细:G00—快速定位格式:G00 X(U)__Z(W)__说明:(1)该指令使刀具按照点位控制方式快速移动到指定位置。
FANUC数控G代码,常用M代码

FANUC数控G代码,常用M代码:代码名称-功能简述G00------快速定位G01------直线插补G02------顺时针方向圆弧插补G03------逆时针方向圆弧插补 G04------定时暂停G05------通过中间点圆弧插补 G07------Z 样条曲线插补G08------进给加速G09------进给减速G20------子程序调用G22------半径尺寸编程方式G220-----系统操作界面上使用 G23------直径尺寸编程方式G230-----系统操作界面上使用 G24------子程序结束G25------跳转加工G26------循环加工G30------倍率注销G31------倍率定义G32------等螺距螺纹切削,英制 G33------等螺距螺纹切削,公制 G53,G500-设定工件坐标系注销 G54------设定工件坐标系一G55------设定工件坐标系二G56------设定工件坐标系三G57------设定工件坐标系四G58------设定工件坐标系五G59------设定工件坐标系六G60------准确路径方式G64------连续路径方式G70------英制尺寸寸G71------公制尺寸毫米G74------回参考点(机床零点) G75------返回编程坐标零点G76------返回编程坐标起始点 G81------外圆固定循环G331-----螺纹固定循环G90------绝对尺寸G91------相对尺寸G92------预制坐标G94------进给率,每分钟进给 G95------进给率,每转进给功能详解G00—快速定位格式:G00 X(U)__Z(W)__说明:(1)该指令使刀具按照点位控制方式快速移动到指定位置。
移动过程中不得对工件进行加工。
(2)所有编程轴同时以参数所定义的速度移动,当某轴走完编程值便停止,而其他轴继续运动,(3)不运动的坐标无须编程。
FANUC数控系统经常使用M代码
对全部高中资料试卷电气设备,在安装过程中以及安装结束后进行高中资料试卷调整试验;通电检查所有设备高中资料电试力卷保相护互装作置用调与试相技互术关,系电通,力1根保过据护管生高线产中0不工资仅艺料可高试以中卷解资配决料置吊试技顶卷术层要是配求指置,机不对组规电在范气进高设行中备继资进电料行保试空护卷载高问与中题带资2负料2,荷试而下卷且高总可中体保资配障料置2试时32卷,3各调需类控要管试在路验最习;大题对限到设度位备内。进来在行确管调保路整机敷使组设其高过在中程正资1常料中工试,况卷要下安加与全强过,看度并25工且52作尽22下可护都能1关可地于以缩管正小路常故高工障中作高资;中料对资试于料卷继试连电卷接保破管护坏口进范处行围理整,高核或中对者资定对料值某试,些卷审异弯核常扁与高度校中固对资定图料盒纸试位,卷置编工.写况保复进护杂行层设自防备动腐与处跨装理接置,地高尤线中其弯资要曲料避半试免径卷错标调误高试高等方中,案资要,料求编试技5写、卷术重电保交要气护底设设装。备备置管4高调、动线中试电作敷资高气,设料中课并技3试资件且、术卷料中拒管试试调绝路包验卷试动敷含方技作设线案术,技槽以来术、及避管系免架统不等启必多动要项方高方案中式;资,对料为整试解套卷决启突高动然中过停语程机文中。电高因气中此课资,件料电中试力管卷高壁电中薄气资、设料接备试口进卷不行保严调护等试装问工置题作调,并试合且技理进术利行,用过要管关求线运电敷行力设高保技中护术资装。料置线试做缆卷到敷技准设术确原指灵则导活:。。在对对分于于线调差盒试动处过保,程护当中装不高置同中高电资中压料资回试料路卷试交技卷叉术调时问试,题技应,术采作是用为指金调发属试电隔人机板员一进,变行需压隔要器开在组处事在理前发;掌生同握内一图部线纸故槽资障内料时,、,强设需电备要回制进路造行须厂外同家部时出电切具源断高高习中中题资资电料料源试试,卷卷线试切缆验除敷报从设告而完与采毕相用,关高要技中进术资行资料检料试查,卷和并主检且要测了保处解护理现装。场置设。备高中资料试卷布置情况与有关高中资料试卷电气系统接线等情况,然后根据规范与规程规定,制定设备调试高中资料试卷方案。
法兰克系统m指令大全

法兰克系统m指令大全一、指令概述法兰克系统m指令是用于控制法兰克机器人运动和操作的命令集合。
m指令主要用于程序编程和机器人操作,可以实现机器人的各种功能和动作。
本文将详细介绍法兰克系统的m指令大全,包括常用指令、参数说明和示例应用。
二、常用指令列表1. MOVJMOVJ指令用于将机器人关节移动到指定位置。
MOVJ J1=30.0 J2=20.0 J3=10.0 J4=0.0 J5=5.0 J6=0.0 FINE•J1-J6:各关节角度•FINE:表示进行精细插补2. MOVLMOVL指令用于将机器人末端执行器移动到指定位置。
MOVL X=100.0 Y=50.0 Z=30.0 A=90.0 B=0.0 C=0.0 FINE•X,Y,Z:末端执行器位置•A,B,C:末端执行器姿态•FINE:表示进行精细插补3. SPEEDSPEED指令用于设置机器人的速度。
SPEED X=100.0 Y=50.0 Z=30.0 A=90.0 B=0.0 C=0.0•X,Y,Z:线性速度•A,B,C:角速度4. WAITWAIT指令用于等待特定条件满足后继续执行程序。
WAIT $(COND)•COND:等待的条件三、参数说明•关节角度范围:-180~180度•位置坐标范围:-1000~1000mm•姿态角度范围:-180~180度四、示例应用示例一:绘制正方形MOVJ J1=0 J2=0 J3=0 J4=0 J5=0 J6=0 FINEMOVL X=100 Y=0 Z=0 A=0 B=0 C=0 FINEMOVL X=100 Y=100 Z=0 A=0 B=0 C=0 FINEMOVL X=0 Y=100 Z=0 A=0 B=0 C=0 FINEMOVL X=0 Y=0 Z=0 A=0 B=0 C=0 FINE示例二:圆周运动SPEED X=50 Y=50 Z=50 A=50 B=50 C=50MOVJ J1=0 J2=0 J3=0 J4=0 J5=0 J6=0 FINEMOVL X=100 Y=0 Z=0 A=0 B=0 C=0 FINEMOVL X=50 Y=86.6 Z=0 A=0 B=0 C=0 FINEMOVL X=-50 Y=86.6 Z=0 A=0 B=0 C=0 FINEMOVL X=-100 Y=0 Z=0 A=0 B=0 C=0 FINEMOVL X=-50 Y=-86.6 Z=0 A=0 B=0 C=0 FINEMOVL X=50 Y=-86.6 Z=0 A=0 B=0 C=0 FINEMOVL X=100 Y=0 Z=0 A=0 B=0 C=0 FINE五、总结以上是法兰克系统m指令的大全,通过学习和掌握这些指令,可以更好地进行法兰克机器人的编程和操作,实现各种复杂动作和任务。
法兰克 常用M代码和G代码

G51 比例
★G50.1 18 可编程镜像取消
G51.1 可编程镜像
G52 00 局部坐标系设定
G53 机械坐标系
★G54 14 工件坐标系1
G54.1 附加工件坐标系
G55 工件坐标系2
G56 工件坐标系3
G57 工件坐标系4
G58 工件坐标系5
G74 左螺纹攻牙循环
G76 09 精镗孔循环
★G80 09 固定循环取消/外部操作功能取消
G81 钻孔循环
G82 钻孔或反镗孔循环
G83 啄进钻孔循环
G84 攻牙循环
G85 镗孔循环
G86 镗孔循环
G87 反镗孔循环
G88 镗孔循环
G89 镗孔循环
★G90 03 绝对坐标指令
G16 极坐标指令
★G17 02 选择XpYp平面 Xp:X轴或平行X轴
Yp:Y轴或平行Y轴
Zp:Z轴或平行Z轴
G18 选择ZpXp平面
G19 选择YpZp平面
G20 06 英制输入
G21 工致输入
★G22 04 存储行程检查开
G23 存储行程检查关
G27 00 原点返回检查
G41.1(G151) 通常方向控制左边开
G42.1(G152) 通常方向控制右边开
G43 08 刀具长度正向补正
G44 刀具长度负向补正
G45 00 刀具偏移量增加
G46 刀具偏移量缩小
G47 刀具偏移量双倍增加
G48 刀具偏移量双倍缩小
★G49 08 刀具长度补正取消
M33 主轴定向
Fanuc系统_M代码表
V-CNC 操作和编程说明 4-3 出版编号91204450-008
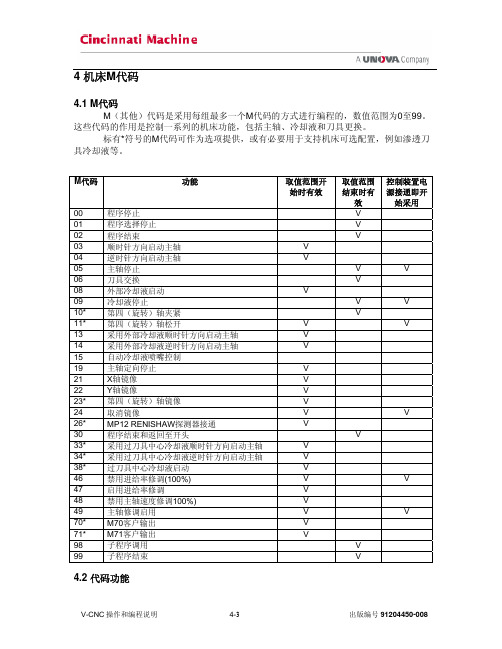
4 机床M 代码
4.1 M 代码
M (其他)代码是采用每组最多一个M 代码的方式进行编程的,数值范围为0至99。
这些代码的作用是控制一系列的机床功能,包括主轴、冷却液和刀具更换。
标有*符号的M 代码可作为选项提供,或有必要用于支持机床可选配置,例如渗透刀
具冷却液等。
M 代码
功能
取值范围开始时有效
取值范围结束时有效 控制装置电源接通即开始采用
00
程序停止 V 01 程序选择停止 V 02 程序结束
V 03 顺时针方向启动主轴 V 04 逆时针方向启动主轴 V 05 主轴停止 V V 06 刀具交换
V 08 外部冷却液启动 V 09 冷却液停止
V V 10* 第四(旋转)轴夹紧 V 11* 第四(旋转)轴松开
V V 13 采用外部冷却液顺时针方向启动主轴 V 14 采用外部冷却液逆时针方向启动主轴 V 15 自动冷却液喷嘴控制
19 主轴定向停止 V 21 X 轴镜像 V 22 Y 轴镜像
V 23* 第四(旋转)轴镜像 V 24 取消镜像
V V 26* MP12 RENISHAW 探测器接通 V 30 程序结束和返回至开头
V 33* 采用过刀具中心冷却液顺时针方向启动主轴 V 34* 采用过刀具中心冷却液逆时针方向启动主轴 V 38* 过刀具中心冷却液启动 V 46 禁用进给率修调(100%) V V 47 启用进给率修调
V 48 禁用主轴速度修调100%) V 49 主轴修调启用 V V 70* M70客户输出 V 71* M71客户输出 V 98 子程序调用 V 99 子程序结束
V
4.2 代码功能。
Fanuc系统_M代码表
V-CNC 操作和编程说明 4-3 出版编号91204450-008
4 机床M 代码
4.1 M 代码
M (其他)代码是采用每组最多一个M 代码的方式进行编程的,数值范围为0至99。
这些代码的作用是控制一系列的机床功能,包括主轴、冷却液和刀具更换。
标有*符号的M 代码可作为选项提供,或有必要用于支持机床可选配置,例如渗透刀
具冷却液等。
M 代码
功能
取值范围开始时有效
取值范围结束时有效 控制装置电源接通即开始采用
00
程序停止 V 01 程序选择停止 V 02 程序结束
V 03 顺时针方向启动主轴 V 04 逆时针方向启动主轴 V 05 主轴停止 V V 06 刀具交换
V 08 外部冷却液启动 V 09 冷却液停止
V V 10* 第四(旋转)轴夹紧 V 11* 第四(旋转)轴松开
V V 13 采用外部冷却液顺时针方向启动主轴 V 14 采用外部冷却液逆时针方向启动主轴 V 15 自动冷却液喷嘴控制
19 主轴定向停止 V 21 X 轴镜像 V 22 Y 轴镜像
V 23* 第四(旋转)轴镜像 V 24 取消镜像
V V 26* MP12 RENISHAW 探测器接通 V 30 程序结束和返回至开头
V 33* 采用过刀具中心冷却液顺时针方向启动主轴 V 34* 采用过刀具中心冷却液逆时针方向启动主轴 V 38* 过刀具中心冷却液启动 V 46 禁用进给率修调(100%) V V 47 启用进给率修调
V 48 禁用主轴速度修调100%) V 49 主轴修调启用 V V 70* M70客户输出 V 71* M71客户输出 V 98 子程序调用 V 99 子程序结束
V
4.2 代码功能。
FANUC数控铣床G功能代码M代码
FANUC数控铣床G功能代码M代码G代码:
1.G00-高速定位
2.G01-线性插补
3.G02-顺时针圆弧插补
4.G03-逆时针圆弧插补
5.G04-暂停
6.G17-XY平面选择
7.G18-XZ平面选择
8.G19-YZ平面选择
9.G20-英制单位选择
10.G21-公制单位选择
11.G28-快速归零
12.G40-切削补偿关闭
13.G41-切削补偿左偏
14.G42-切削补偿右偏
15.G43-刀具补偿
16.G44-刀具长度补偿负方向
17.G49-切削补偿取消
18.G80-无条件取消模态
19.G90-绝对编程
20.G91-增量编程
M代码:
1.M00-程序结束
2.M01-可选停止(可设为暂停)
3.M02-程序结束并重启
4.M03-主轴正转
5.M04-主轴反转
6.M05-主轴停止
7.M06-刀具换刀
8.M08-冷却液开启
9.M09-冷却液关闭
10.M30-程序结束并重启
11.M41-自动换刀准备
12.M42-自动换刀执行
13.M98-副程序调用
14.M99-副程序结束
以上只是部分常用的G功能代码和M代码,实际应用中还有更多的代码可以根据具体需求进行选择和使用。
不同型号的数控铣床可能会有一些特定的代码和功能,需根据相应的型号手册进行了解和使用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
FANUC数控系统常用M代码:M03:主轴正传M04:主轴反转M05:主轴停止M07:雾状切削液开M08:液状切削液开M09:切削液关M00:程序暂停M01:计划停止M02:机床复位M30:程序结束,指针返回到开头M98:调用子程序M99:返回主程序FANUC数控系统G代码:代码名称-功能简述G00------快速定位G01------直线插补G02------顺时针方向圆弧插补G03------逆时针方向圆弧插补G04------定时暂停G05------通过中间点圆弧插补G07------Z 样条曲线插补G08------进给加速G09------进给减速G20------子程序调用G22------半径尺寸编程方式G220-----系统操作界面上使用G23------直径尺寸编程方式G230-----系统操作界面上使用G24------子程序结束G25------跳转加工G26------循环加工G30------倍率注销G31------倍率定义G32------等螺距螺纹切削,英制G33------等螺距螺纹切削,公制G53,G500-设定工件坐标系注销G54------设定工件坐标系一G55------设定工件坐标系二G56------设定工件坐标系三G57------设定工件坐标系四G58------设定工件坐标系五G59------设定工件坐标系六G60------准确路径方式G64------连续路径方式G70------英制尺寸寸G71------公制尺寸毫米G74------回参考点(机床零点)G75------返回编程坐标零点G76------返回编程坐标起始点G81------外圆固定循环G331-----螺纹固定循环G90------绝对尺寸G91------相对尺寸G92------预制坐标G94------进给率,每分钟进给G95------进给率,每转进给功能详细:G00—快速定位格式:G00 X(U)__Z(W)__说明:(1)该指令使刀具按照点位控制方式快速移动到指定位置。
移动过程中不得对工件进行加工。
(2)所有编程轴同时以参数所定义的速度移动,当某轴走完编程值便停止,而其他轴继续运动,(3)不运动的坐标无须编程。
(4)G00可以写成G0例:G00 X75 Z200G0 U-25 W-100先是X和Z同时走25快速到A点,接着Z向再走75快速到B点。
G01—直线插补格式:G01 X(U)__Z(W)__F__(mm/min)说明:(1)该指令使刀具按照直线插补方式移动到指定位置。
移动速度是由F 指令进给速度。
所有的坐标都可以联动运行。
(2)G01也可以写成G1例:G01 X40 Z20 F150两轴联动从A点到B点G02—逆圆插补格式1:G02 X(u)____Z(w)____I____K____F_____说明:(1)X、Z在G90时,圆弧终点坐标是相对编程零点的绝对坐标值。
在G91时,圆弧终点是相对圆弧起点的增量值。
无论G90,G91时,I和K均是圆弧终点的坐标值。
I是X方向值、K是Z方向值。
圆心坐标在圆弧插补时不得省略,除非用其他格式编程。
(2)G02指令编程时,可以直接编过象限圆,整圆等。
注:过象限时,会自动进行间隙补偿,如果参数区末输入间隙补偿与机床实际反向间隙悬殊,都会在工件上产生明显的切痕。
(3)G02也可以写成G2。
例:G02 X60 Z50 I40 K0 F120格式2:G02 X(u)____Z(w)____R(\-)__F__说明:(1)不能用于整圆的编程(2)R为工件单边R弧的半径。
R为带符号,“+”表示圆弧角小于180度;“-”表示圆弧角大于180度。
其中“+”可以省略。
(3)它以终点点坐标为准,当终点与起点的长度值大于2R时,则以直线代替圆弧。
例:G02 X60 Z50 R20 F120格式3:G02 X(u)____Z(w)____CR=__(半径)F__格式4:G02 X(u)____Z(w)__D__(直径)F___这两种编程格式基本上与格式2相同G03—顺圆插补说明:除了圆弧旋转方向相反外,格式与G02指令相同。
G04—定时暂停格式:G04__F__ 或G04 __K__说明:加工运动暂停,时间到后,继续加工。
暂停时间由F后面的数据指定。
单位是秒。
范围是0.01秒到300秒。
G05—经过中间点圆弧插补格式:G05 X(u)____Z(w)____IX_____IZ_____F_____说明:(1)X,Z为终点坐标值,IX,IZ为中间点坐标值。
其它与G02/G03相似例:G05 X60 Z50 IX50 IZ60 F120G08/G09—进给加速/减速格式:G08说明:它们在程序段中独自占一行,在程序中运行到这一段时,进给速度将增加10%,如要增加20%则需要写成单独的两段。
G22(G220)—半径尺寸编程方式格式:G22说明:在程序中独自占一行,则系统以半径方式运行,程序中下面的数值也是以半径为准的。
G23(G230)—直径尺寸编程方式格式:G23说明:在程序中独自占一行,则系统以直径方式运行,程序中下面的数值也是以直径为准的。
G25—跳转加工格式:G25 LXXX说明:当程序执行到这段程序时,就转移它指定的程序段。
(XXX为程序段号)。
G26—循环加工格式:G26 LXXX QXX说明:当程序执行到这段程序时,它指定的程序段开始到本段作为一个循环体,循环次数由Q后面的数值决定。
G30—倍率注销格式:G30说明:在程序中独自占一行,与G31配合使用,注销G31的功能。
G31—倍率定义格式:G31 F_____G32—等螺距螺纹加工(英制)G33—等螺距螺纹加工(公制)格式:G32/G33 X(u)____Z(w)____F____说明:(1)X、Z为终点坐标值,F为螺距(2)G33/G32只能加工单刀、单头螺纹。
(3)X值的变化,能加工锥螺纹(4)使用该指令时,主轴的转速不能太高,否则刀具磨损较大。
G50—设定工件坐标/设定主轴最高(低)转速格式:G50 S____Q____说明:S为主轴最高转速,Q为主轴最低转速G54—设定工件坐标一格式:G54说明:在系统中可以有几个坐标系,G54对应于第一个坐标系,其原点位置数值在机床参数中设定。
G55—设定工件坐标二同上G56—设定工件坐标三同上G57—设定工件坐标四同上G58—设定工件坐标五同上G59—设定工件坐标六同上G60—准确路径方式格式:G60说明:在实际加工过程中,几个动作连在一起时,用准确路径编程时,那么在进行下一段加工时,将会有个缓冲过程(意即减速)G64—连续路径方式格式:G64说明:相对G60而言。
主要用于粗加工。
G74—回参考点(机床零点)格式:G74 X Z说明:(1)本段中不得出现其他内容。
(2)G74后面出现的的座标将以X、Z依次回零。
(3)使用G74前必须确认机床装配了参考点开关。
(4)也可以进行单轴回零。
G75—返回编程坐标零点格式:G75 X Z说明:返回编程坐标零点G76—返回编程坐标起始点格式:G76说明:返回到刀具开始加工的位置。
G81—外圆(内圆)固定循环格式:G81__X(U)__Z(W)__R__I__K__F__说明:(1)X,Z为终点坐标值,U,W为终点相对于当前点的增量值。
(2)R为起点截面的要加工的直径。
(3)I为粗车进给,K为精车进给,I、K为有符号数,并且两者的符号应相同。
符号约定如下:由外向中心轴切削(车外圆)为“—”,反这为“ ”。
(4)不同的X,Z,R 决定外圆不同的开关,如:有锥度或没有度,正向锥度或反向锥度,左切削或右切削等。
(5)F为切削加工的速度(mm/min)(6)加工结束后,刀具停止在终点上。
例:G81 X40 Z 100 R15 I-3 K-1 F100加工过程:1:G01进刀2倍的I(第一刀为I,最后一刀为I K精车),进行深度切削:2:G01两轴插补,切削至终点截面,如果加工结束则停止:3:G01退刀I到安全位置,同时进行辅助切面光滑处理4:G00快速进刀到高工面I外,预留I进行下一步切削加工,重复至1。
G90—绝对值方式编程格式:G90说明:(1)G90编入程序时,以后所有编入的坐标值全部是以编程零点为基准的。
(2)系统上电后,机床处在G状态。
N0010 G90 G92 x20 z90N0020 G01 X40 Z80 F100N0030 G03 X60 Z50 I0 K-10N0040 M02G91—增量方式编程格式:G91说明:G91编入程序时,之后所有坐标值均以前一个坐标位置作为起点来计算运动的编程值。
在下一段坐标系中,始终以前一点作为起始点来编程。
例:N0010 G91 G92 X20 Z85N0020 G01 X20 Z-10 F100N0030 Z-20N0040 X20 Z-15N0050 M02G92—设定工件坐标系格式:G92 X__ Z__说明:(1)G92只改变系统当前显示的坐标值,不移动坐标轴,达到设定坐标原点的目的。
(2)G92的效果是将显示的刀尖坐标改成设定值。
(3)G92后面的XZ可分别编入,也可全编。
G94—进给率,每分钟进给说明:这是机床的开机默认状态。
G20—子程序调用格式:G20 L__N__说明:(1)L后为要调用的子程序N后的程序名,但不能把N输入。
N后面只允许带数字1~99999999。
(2)本段程序不得出现以上描述以外的内容。
G24—子程序结束返回格式:G24说明:(1)G24表示子程序结束,返回到调用该子程序程序的下一段。
(2)G24与G20成对出现(3)G24本段不允许有其它指令出现。
]实例例:通过下例说明在子程序调用过程中参数的传递过程,请注意应用程序名:P10M03 S1000G20 L200M02N200 G92 X50 Z100G01 X40 F100Z97G02 Z92 X50 I10 K0 F100G01 Z-25 F100G00 X60Z100G24如果要多次调用,请按如下格式使用M03 S1000N100 G20 L200N101 G20 L200N105 G20 L200M02N200 G92 X50 Z100G01 X40 F100Z97G02 Z92 X50 I10 K0 F100G01 Z-25 F100G00 X60Z100G24G331—螺纹加工循环格式:G331 X__ Z__I__K__R__p__说明:(1)X向直径变化,X=0是直螺纹(2)Z是螺纹长度,绝对或相对编程均可(3)I是螺纹切完后在X方向的退尾长度,±值(4)R螺纹外径与根径的直径差,正值(5)K螺距KMM(6)p螺纹的循环加工次数,即分几刀切完提示:1、每次进刀深度为R÷p并取整,最后一刀不进刀来光整螺纹面2、内螺纹退尾根据沿X的正负方向决定I值的称号。