Buck变换器实现及其调速系统设计与调试
基于Buck电路的直流调速系统设计
O  ̄ l - - g
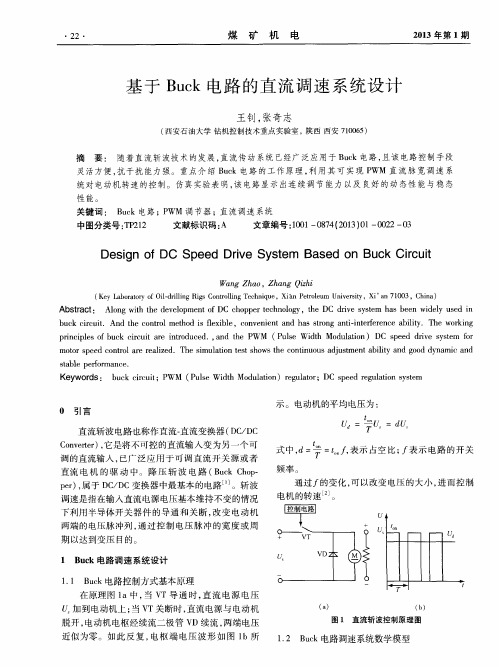
示 。电动机 的平 均 电压 为 :
直 流斩波 电路 也称作 直 流一 直 流变换 器 ( 。 c / 。 c
C o n v e r t e r ) , 它 是将不 可控 的直 流输 入变 为 另一 个可 调 的直 流输入 , 已广 泛应 用 于 可 调 直 流开 关 源 或 者
=
=d
式中, d= = / , 表示 占空 比 ; - 厂 表 示 电路 的 开关
频率。
直流 电 机 的驱 动 中。 降 压 斩 波 电 路 ( B u c k C h o p . p e r ) , 属于 D C / D C变 换器 中最基 本 的 电路 … 。斩 波
统 对 电动机 转速 的控制 。仿 真实验 表 明 , 该 电路 显示 出连 续调 节 能 力 以及 良好 的动 态性 能与 稳 态
性能 。
关键 词 : B u c k电路 ; P WM 调 节器 ;直流调 速 系统 中图分 类号 : T P 2 1 2 文献标 识码 : A 文章编 号 : 1 0 0 1 — 0 8 7 4 ( 2 0 1 3 ) O 1 - 0 0 2 2- 0 3
己 ,
U
VT VD2
期 以达 到变压 目的 。 1 B u c k电路调 速 系统 设计
1 . 1 B u c k 电路控制方式基本原理
在原 理 图 1 a中 , 当V T导 通 时 , 直 流 电 源 电压 加 到 电动机 上 ; 当V T关 断 时 , 直 流 电源与 电 动机 脱开, 电动机 电枢 经续 流二 极 管 V D续 流 , 两端 电压
Ab s t r a c t : Al o n g w i t h t h e d e v e l o p me n t o f D C c h o p p e r t e c h n o l o g y,t h e D C d i r v e s y s t e m h a s b e e n w i d e l y u s e d i n b u c k c i r c u i t .An d t h e c o n t r o l me t h o d i s f l e x i b l e ,c o n v e n i e n t a n d h a s s t r o n g a n t i — i n t e r f e r e n c e a b i l i t y .T h e wo r k i n g
BUCK变换器及其控制技术的研究

BUCK 变换器及其控制技术的研究一、实验目的1、理解开环、电压单闭环和电压电流双闭环控制策略的原理,完成系统闭环控制调试;2、建立变换器的模型,通过仿真和实验掌握电压和电流调节器的参数设计方法;3、验证BUCK变换器的输入输出波形特性,PWM波形,及输入输出数量关系,加深对BUCK变换器连续和断续工作模态下的工作原理及特性的理解。
二、实验内容熟悉SG3525的原理及使用方法,理解PWM波产生过程;研究BUCK变换器开环、电压闭环、电压电流双闭环状态下电路各器件,包括功率管、二极管、电感电压电流工作情况,输入输出电量关系,控制电路参数对变换器的性能的影响。
观察电压纹波,观察不同电感、频率和负载对电流连续点的影响。
理解BUCK 变换器闭环控制过程,掌握闭环性能指标。
变换器的基本要求如下:输入电压:20~30V输出电压:15V(输出电压闭环控制时)输出负载电流:0.1~1A工作频率:50kHz输出纹波电压:≤100m V三、实验仪器四、实验原理1)BUCK主电路原理图(图1)图1.BUCK主电路原理图2)控制电路SG3525内部结构框图()图2.SG3525内部结构框图五、实验步骤1、将BUCK变换器挂箱的所有开关关闭后再接线。
2、控制电路接20V直流电压,调节电位器RW1,用示波器观察并记录占空比为某一定值时SG3525 各管脚波形及驱动电路输出波形。
注意观察SG3525 的9脚、5脚波形和输出波形之间的关系,理解SG3525 芯片PWM 波产生过程。
调节RW2观测PWM波频率的变化,通过测得的PWM波计算PWM波频率。
3、控制电路接20V直流电压,主电路接6-30V可调直流电压,可控制开关S4打在开环状态。
当将开关打在单环时,电路工作在单电压环控制模式下,打在双环时,电路工作在电压电流双环控制模式下。
分别观察三种控制模式下SG3525各管脚波形及驱动电路输出波形。
(一).开环状态(1).电感电流连续情况:打开主电路电源,使主电路工作电压为25V,观察电感支路的电流波形,调节负载,使电感工作在电流连续情况下。
基于Buck变换器的永磁无刷直流电动机调速系统
本科毕业设计(论文)基于Buck变换器的永磁无刷直流电动机调速系统(张宏军)燕山大学2014年6月本科毕业设计(论文)基于Buck变换器的永磁无刷直流电动机调速系统学院:电气工程学院专业:10级应用电子学生姓名:张宏军学号:100103030135指导教师:李珍国答辩日期:2014年6月26日燕山大学毕业设计(论文)任务书摘要摘要永磁无刷直流电动机由于其具有结构简单、出力大和效率高等特点,已在航天航空、工业过程控制、汽车电子、家用电器等领域得到了广泛的应用。
传统的永磁无刷直流电动机的主电路通常采用全桥拓扑形式,功率器件的开关损耗较大,同时转矩脉动也较为严重。
为此本课题拟在桥式电路前端添加Buck变换器,通过该变换器得到不同转速所需施加电压大小,而桥式电路只以六节拍调制方式实现换相,从而达到减小开关损耗和转矩脉动的目的。
本文对Buck变换器的电感、电容进行了理论计算,建立了基于Buck 变换器的永磁无刷直流电动机调速系统的频域模型。
在此基础上设计了电流环和转速环的PI调节器。
最后在MATLAB环境中,使用M文件对基于Buck变换器的永磁无刷直流电动机调速系统进行了仿真验证,所得仿真结果的正确性证明了本设计的可行性。
关键词无刷直流电动机,Buck,MATLABAbstractAbstractPermanent magnetic brushless DC motor, which has simple structure, high output torque and efficiency, has been widely used in the fields of Aerospace, industrial process control, automotive electronics and household appliances and so on. The main circuit of the traditional BLDCM is usually adopts full bridge topology. The switching loss of power electronic devices is big and torque ripple is also serious. Therefore this study add a Buck converter in front of the bridge circuit and get the corresponding DC link voltages required by different speed by it. The bridge circuit only use six beat modulation to commutate, so as to reduce the switching loss and torque ripple.In this paper, the inductor and capacitor of Buck converter are calculated in theory. The frequency domain model of BLDCM speed control system based on Buck converter has been established. And based on this model, the PI regulator of the current loop and speed loop has been designed.Finally, the BLDCM speed control system based on Buck converter is simulated by M file in the MATLAB environment. The correct simulation results proves the feasibility of the design.Keywords BLDCM, Buck, MATLAB目录摘要 (I)Abstract ................................................................................................................ I I 第1章绪论.. (1)1.1课题背景 (1)1.2无刷直流电机研究现状 (2)1.3论文的主要研究工作 (3)第2章无刷直流电动机的组成、原理及模型分析 (5)2.1无刷直流电动机的组成 (5)2.1.1 电机本体 (5)2.1.2 逆变器 (6)2.1.3 位置检测器 (7)2.1.4 控制器 (8)2.2无刷直流电动机的基本工作原理 (8)2.3无刷直流电动机本体的建模与仿真 (11)2.3.1 无刷直流电动机本体的数学模型 (11)2.3.2 定子绕组的反电动势模型 (12)2.3.3 逆变器二极管续流分析 (13)2.4无刷直流电动机本体仿真 (14)2.5本章小结 (15)第3章基于Buck变换器的无刷直流电动机调速系统系统设计 (16)3.1B UCK变换器的研究 (16)3.2电流闭环的研究 (17)3.2.1 前级带Buck电路的无刷直流电动机主电路建模分析 (17)3.2.2 电流调节器的设计 (20)3.3转速闭环的研究 (23)3.4本章小结 (25)第4章电机控制系统仿真分析 (26)4.1基于B UCK变换器的无刷直流电动机控制系统结构组成 (26)4.2电机参数设定与计算 (27)III4.3电机控制系统M文件仿真程序流程图 (28)4.4电机控制系统仿真波形分析 (29)4.4.1 电机带额定负载启动 (29)4.4.2 电机控制系统给定突变仿真 (34)4.4.3电机控制系统负载突变仿真 (38)4.5本章小结 (41)结论 (42)参考文献 (44)致谢 (46)附录1 (47)附录2 (52)附录3 (62)附录4 (69)第1章绪论第1章绪论1.1 课题背景电机是一种机电能量转换的电磁机械装置。
(完整word版)Buck变换器的设计与仿真
目录1 Buck变换器技术........................................................................................................................... - 1 -1.1 Buck变换器基本工作原理............................................................................................... - 1 -1.2 Buck变换器工作模态分析............................................................................................... - 2 -1。
3 Buck变化器外特性........................................................................................................ - 3 -2 Buck变换器参数设计.................................................................................................................. - 5 -2.1 Buck变换器性能指标....................................................................................................... - 5 -2。
2 Buck变换器主电路设计................................................................................................ - 5 -2.2。
BUCK变换器设计
BUCK变换器设计一、引言BUCK(降压)变换器是一种常见的开环降压电源设计,具有广泛的应用领域。
在本文中,我们将详细介绍BUCK变换器的设计原理和步骤。
二、BUCK变换器的基本原理1.输入电压通过一个开关管和一个电感器连接到输出电压。
开关管通过开关周期性地打开和关闭来调整输出电压。
2.当开关打开时,电流通过电感器,能量存储在电感器磁场中。
3.当开关关闭时,电感器上的磁场坍缩,通过一个二极管将存储的能量传递到输出负载电路中。
4.通过调整开关管的开关周期和占空比,可以实现对输出电压的精确控制。
三、BUCK变换器的设计步骤下面是设计BUCK变换器的基本步骤:1.确定输入电压和输出电压范围。
根据应用的需求,确定输入电压和输出电压的合适范围。
输入电压通常由电源提供,而输出电压则由负载需求决定。
2.选择合适的开关器件。
根据输入电压和输出电流的要求,选择合适的开关管和二极管,以确保电流和功率的可靠传输。
3.计算开关周期和占空比。
根据输入输出电压的比例以及工作频率,计算出合适的开关周期和占空比。
这两个参数直接影响输出电压的稳定性和效率。
4.计算电感器和输出电容。
根据预设的开关周期和占空比,计算出合适的电感器和输出电容值。
电感器和输出电容可以提供电流平滑和稳定输出电压的功能。
5.设计反馈电路。
设计一个反馈电路来控制开关管的工作,以实现对输出电压的精确调节。
常见的反馈电路包括PID控制器和比例控制器。
6.进行验证和测试。
在实际应用中,进行验证和测试以确保设计的BUCK变换器满足要求。
四、BUCK变换器的特点和应用1.高效率。
BUCK变换器通过周期性开关操作和能量传递来实现电流和功率的可靠转换,使得效率比传统的线性稳压器更高。
2.范围广。
BUCK变换器可以适应不同的输入电压和输出电压需求,可以应用于多种电子设备和系统。
3.体积小。
由于BUCK变换器的高效转换机制,可以采用较小的电感器和电容器,从而实现体积小巧的设计。
电力电子设计基于buck电路直流伺服电机调速系统的简单设计 (1)

《电力电子技术大作业》作业题目:基于buck电路直流伺服电机调速系统的简单设计姓名:班级:学号:同组人:摘要直流伺服电动机具有优良的调速特性,调速平滑、简单,具有较大的启动转矩和良好的启、制动性能以及能在较大范围内实现精度、速度和位置控制。
同时其过载能力大,能承受频繁的冲击负载,所以在要求系统性能高的场合都广泛地使用直流伺服系统。
20 世纪 80 年代后,随着科技的进步,交流调速系统、无刷直流电机的迅速发展,有逐渐取代有刷直流电机调速的趋势。
但是直流有刷伺服电机具有独特的优良性能,它可以方便的进行无级调速且有着良好的调速性能,所以直到现在尚未被取代。
对一些成本敏感的普通工业和民用场合仍广泛应用。
本设计针对调速的可靠性和经济性来设计小功率直流伺服电动机调速系统,不仅工作可靠,成本低,并且具有软启动、恒转矩、宽调速、硬特性等功能,实现了小功率直流伺服电机的平滑无级调速以及电机的保护。
该系统主电路采用单相桥式半控整流线路,具有电压负反馈。
本系统调压电路采用buck降压电路,可以实现电压的平滑过渡,使得电机在运行时平稳运行,不会出现过大的震动。
对于电机转向的控制,可以用四个IJBT来实现对电机正反转的控制。
关键词:直流伺服电机;直流调速;晶闸管;电压负反馈;buck电路;PSIM6.0AbstractDC servo motor has excellent speed control characteristics smooth and simple. It has strong starting torque and excellent starting and braking performance. It can control a large range of accuracy, speed and position. At the same time, it has a good overload capacity and can bear frequent impact loads. Therefore, the DC servo system is widely used in those high performance systems. After 20th century 80s,with the development of science and technology, AC speed control system and brushless DC motor has been developed rapidly. Andthey have gradually replaced the brush DC motor speed trend. But thanks to DC brush servo’s unique high performance, it can easily be variable speed and has good speed performance, so until now, it has not been replaced. It is still widely used in general industrial and civil occasions which is cost-sensitive.This article is to design a economic and reliable speed control system of DC servo motor. The system not only has reliable andlow cost, but also has soft start, constant torque, wide speed, hard features and other functions, achieve smooth variable speed of DC motor and protection of the motor. The system of main circuituses single-phase half-controlled rectifier bridge circuit, with voltage negative feedback. The system uses Buck Circuit to realize the smoothtransition of voltage, which makes the motor running smooth in operation and does not appear too large vibration.For the control of steering,we use four IJBT to realize the control of the sterring .Key words: DC servo motor; DC speed adjustment; Thyristor; the voltage negative feedback; Buck Circuit;PSIM6.0目录第1章绪论 (4)1.1直流电机调速的背景和意义 (4)1.2直流伺服电机的应用 (4)1.3直流电机调速发展趋势 (4)第2章直流伺服电机调速原理 (5)2.1直流伺服电机的组成及工作原理 (5)2.2直流伺服电机的机械特性 (5)2.3直流电机调速方法 (7)2.4直流伺服电机速度控制指标 (7)2.5伺服电机启动方法 (8)2.6伺服电机特点 (8)第3章直流伺服电机调速系统 (9)3.1闭环控制系统设计 (9)3.2主电路的选型 (9)3.3整流电路: (10)3.4调压电路: (11)3.5正反转控制电路: (12)第4章基于PSIM的直流伺服电机调速系统的仿真结果 (13)第5章结论 (14)参考文献 (14)第1章绪论1.1直流电机调速的背景和意义直流伺服电机具有调速范围宽、良好的稳定性,具有大的、较长的过载能力,能满足低速度大转矩的要求,反应速度快,能承受频繁的启动、制动和正反转,成本低等优良的特性。
基于MATLABSIMULINK的buck变换器的设计与分析
基于MATLAB/SIMULINK的buck变换器的设计与分析摘要:本实验分析了buckDC/DC变换器的工作原理,对其进行状态空间平均法建模。
并应用Matlab进行仿真实验和控制系统性能的优化。
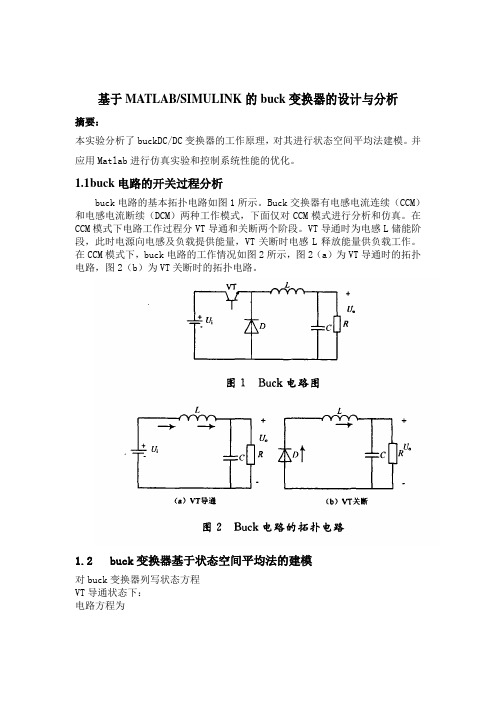
1.1b uck电路的开关过程分析buck电路的基本拓扑电路如图1所示。
Buck交换器有电感电流连续(CCM)和电感电流断续(DCM)两种工作模式,下面仅对CCM模式进行分析和仿真。
在CCM模式下电路工作过程分VT导通和关断两个阶段。
VT导通时为电感L储能阶段,此时电源向电感及负载提供能量,VT关断时电感L释放能量供负载工作。
在CCM模式下,buck电路的工作情况如图2所示,图2(a)为VT导通时的拓扑电路,图2(b)为VT关断时的拓扑电路。
1.2buck变换器基于状态空间平均法的建模对buck变换器列写状态方程VT导通状态下:电路方程为状态方程为VT关断状态下:电路方程为状态方程为根据状态空间平均法,可以得到buck变换器的状态空间平均模型。
其基本思想是根据开关处于通态和断态时各自的状态方程及所占的时间比例,将两个不同时间段的方程按各自的时间比例加权平均,即可得到一个开关周期内,系统近似的平均状态方程。
因此设占空比为D,D*VT导通状态下的电路方程+(1-D)*VT断开状态下的电路方程得:由此得平均状态方程:因此应用现代控制理论得出buck电路的数学模型式中:状态变量X1为buck变换器输出电压,即电容两端电压;X2为电感电流;D为占空比。
1.3 buck变换器的MATLAB/SIMULINK仿真分析(1) 仿真程序(2) 进行参数的设定设定输入电压u=100V,R=0.5欧姆,D=40%,L=0.01H,C=0.1F电感L越小,电容C越大,震荡周期越小。
下图为不同的电感值和电容值对应的阶跃响应曲线改变L=0.001改变C=0.75占空比D影响输出电压的稳定值的大小,D越大稳定值越大。
改变D=0.5(3)利用配置零极点法设计控制器,优化系统性能1.极点配置法当系统参数为u=100V,R=0.5欧姆,D=40%,L=0.01H,C=0.1F时,对系统进行极点配置法优化。
Buck_Boost变换器的设计及仿真
Buck_Boost变换器的设计及仿真Buck-Boost变换器是一种可以在同一电路内同时实现升压和降压的变换器。
这种变换器可以用于多种不同的应用,主要用于对电压进行放大和缩小,以达到正确的电压水平。
它总是能够将输入电压提高到所需的输出电压。
在本文中,将介绍Buck-Boost变换器的设计及其功能仿真工作。
Buck-Boost变换器的主要部件包括电感器,可变阻器,开关,振荡器和控制器。
电感器的设计是为了提供电流,形成负反馈环。
可变阻器的设计可以改变电路的过载,从而实现电流的调整。
开关的设计是为了实现升压和降压,允许电感器和可变阻器之间的能量交换。
振荡器的设计是为了控制电路内部的电流,以保证开关的实时响应。
通过控制器,可以实现输入和输出电压之间的转换,从而达到预期的电压水平。
为了对Buck-Boost变换器进行仿真,先进行输入,输出和负载之间的建模。
输入模型包括输入电压和要求的输出电压,其中输入电压可以在建模中任意调整。
负载建模通常是一个电阻和一个电容的组合。
输出模型则定义了电路的输出功率和输出电压水平。
接下来,可以对电感器和可变阻器进行建模。
由于电感器是一个电流源,故其建模需要考虑电流大小和电压偏移。
可变阻器建模则需要考虑其阻值和电压偏移。
最后,可以利用仿真软件进行仿真,探究Buck-Boost变换器的性能。
可以仿真该电路的输入和输出电压以及电流,从而分析改变输入电压对系统的影响。
此外,还可以分析负载的影响,比如负载变大时电路的输出能力会怎样受到影响。
这些仿真结果都能为设计者提供宝贵的启发,为确保电路的正常工作奠定基础。
Buck-Boost变化器是一种功能强大的电路,可以改变输入电压并生成预期的输出电压水平。
本文介绍了其设计原理和仿真过程,为设计者提供了宝贵的参考。
未来的研究将会探究更多的变换器类型,继续提高电路的性能和功效。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
运动控制系统课程设计题目:Buck变换器实现及其调速系统设计与调试院系:班级:姓名:学号:指导老师:日期:摘要 (3)第一章概述 (3)第二章设计任务及要求 (4)2.1实验目的 (4)2.2实验内容 (4)2.3设计要求 (4)2.4课程设计基本要求 (5)第三章BUCK变换器的工作原理和各种模型 (6)3.1B UCK变换器介绍 (6)3.2B UCK变换器电路拓扑 (6)3.3PWM控制的基本原理 (7)第四章MATLAB仿真模型的建立 (9)4.1MATLA仿真软件介绍 (9)4.2B UCK电路模型的搭建 (9)4.3B UCK变换器在电机拖动控制系统中的设计与仿真 (12)4.3.1直流电机的数学模型 (12)4.3.2系统在开环情况下的仿真 (13)4.3.3 系统在闭环情况下的仿真 (14)第五章总结与体会 (18)变压调速是直流调速系统的主要方法,调节电枢供电电压从而改变电机的转速。
即需要有一个可控直流源,常用的为直流斩波或者脉宽调制器,其通过电力电子开关控制及电容、电感的充放电及二极管的续流组成直流斩波电路(DC),实现输出电压可控,即升压(BOOST)、降压(BUCK)。
本实验主要针对降压斩波电路(BUCK)进行实验分析。
实验采用MATLAB作为仿真软件,利用PWM 波驱动降压斩波电路为直流电动机提供驱动电压,并通过调节PWM波的占空比来调节电动机的启动电压使达到调节电动机转速的电路设计。
关键词:S-Function;PWM调制;Buck变换器;闭环控制;直流电动机第一章概述直流变换技术(亦称直流斩波技术,DC-DC),作为电力电子技术领域非常活跃的一个分支,在近几年里,得到了充分的发展。
随着电动牵引技术的发展,特别是电子信息类产品的大量涌现,直流变换技术已经广泛应用于生产,生活的各个领域。
由于其有良好的可操作性,被大量应用到电机的调速系统中,很好的解决了电动机调速的不可控性。
BUCK电路作为一种最基本的DC-DC变换电路,由于其简单、实用性在各种电源产品中均得到广泛的应用。
其电路主要器件有电力电子开关(IGBT或MOSFET)、电感、电容、续流二极管。
通过对开关的调节控制电压,其一般采用软开关控制方法,即采用脉宽调制技术(PWM),通过改变占空比来调节输出电压的大小。
其与直流调速系统组成的脉宽调制变换器—直流电机调速系统,简称直流脉宽调速系统,即PWM直流调速系统。
存在:1)主电路简单、功率器件少;2)开关频率高、电流容易连续、谐波小;3)低速性能好、稳态精度高;4)低速性能好,稳态精度高,动态抗干扰能力强等优点。
使用MATLAB等仿真分析,再做实物研究,已经逐渐成为电力电子技术研究的主要方法。
本次课程设计使用MATLAB友好的工作平台和编辑环境进行模型编辑工作,运用它的s函数编辑一个简单的脉冲发生器,要求它的占空可调;运用数学处理功能来处理仿真时的实时数据,利用传递函数构造直流电机转速的数学模型,运用它广泛的模块集合工具箱里的Simulink进行电路模型搭建和系统仿真,控制电路的占空比从而控制输出电压的大小,进而调节电机的转速,同时采用负反馈的控制方式,调节转速在一个恒定值。
第二章设计任务及要求2.1 实验目的1、通过对一个实用的Buck变换器实现及其调速系统的设计、安装、调试来综合运用科学理论知识,提高学生工程意识和实践技能,达到素质和创新能力进一步提升,使学生获得控制技术工程的基本训练。
2、通过系统建模和仿真,掌握用MATLAB / Simulink工具分析设计Buck变换器实现及其调速系统的方法。
3、进一步掌握各种直调速系统的性能,尤其是动态性能。
2.2 实验内容1.理论设计:根据所学的理论知识和实践技能,了解带Buck变换器实现调压的原理;设计相应的直流调速系统(含主电路和控制电路,选择的元器件,系统的电气原理图)。
2.仿真实践:根据所设计系统,利用Matlab/Simulink建立各个组成部分相应的数学模型,并对系统仿真模型进行综合调试,分析系统的动态性能,并进行校正,得出正确的仿真实验波形和合适控制器参数,为搭建实际系统提供参考。
3.动手实践:根据所设计系统,完成单元电路安装、系统组装、单元及系统调试(可利用实验台的某些挂件),得出实物实验波形和系统动、静态性能。
2.3设计要求1、技术参数Buck变换器的PWM信号的频率:20KHz,输入电压:15V,电感:1.5mH,电容:30μF,负载电阻:8.1Ω。
Buck变换器输出0 ~15V直流电压,输出电压可通过改变PWM波占空比调节输出直流电压大小2.设计要求⑴掌握Buck变换器的工作原理、开关模型和平均值模型等状态空间方程;⑵应用MATLAB中的Matlab function(MATLAB函数)模块结合MATLAB语言编写PWM信号的发生器程序;⑶用Simulink中的模块建立Buck变换器的平均值模型,并能够与PWM信号发生器联用。
⑷调速范围D =10,静差率S ≤ 5%;稳态无静差,空载起动到额定转速时的过渡过程时间t s≤ 1.0s。
⑸实际系统具有过流、过压、过载和缺相保护,触发脉冲有故障封锁能力,并设置给定积分器。
3、电机拖动控制系统设计与仿真⑴根据所提供参数,先用Simulink模块建立Buck变换器仿真模型,观测相关数据和波形。
⑵在此基础上接入直流电动机,观察开环系统的转速、电流。
⑶针对开环系统存在的问题,加转速闭环,设计转速调节器,观察转速的稳定效果。
⑷如果时间充裕,在加上电流内环,设计电流调节器,观察电流的稳定效果。
4、安装单元电路并实验、进行系统组装及调试,进行系统测试。
2.4课程设计基本要求1.本课程设计按统一教学计划安排进行,在指导老师指导下完成系统人机界面组态和控制流程图的设计。
按照不同的BUCK变换器调制方法进行系统仿真和调试。
2、课程设计完成后,学生应进行系统的总结,撰写的课程设计报告,报告应书写工整,图表齐全完整。
第三章BUCK变换器的工作原理和各种模型3.1 Buck变换器介绍电力电子器件组成的直流斩波电路,能产生稳定的大范围可调的直流电源,在现代生产中得到广泛的应用。
DC/DC变换是将固定的直流电压变换成可变的直流电压,也称为直流斩波。
斩波器的工作方式有三种:1、保持开关周期Ts不变,调节开关导通时间Ton,称为脉冲宽度调制(Pulse Width Modulation,缩写为PWM);2、保持开关导通时间Ton不变,改变开关周期Ts,称为频率调制或调频型;3、Ton和Ts都可调,使占空比改变,称之为混合型。
Buck电路就是DC/DC变换的一种。
Buck变换器又称降压变换器、串联开关稳压电源、三端开关型降压稳压器。
其输出平均电压Uo小于输入电压Ui,极性相同。
3.2 Buck变换器电路拓扑T是全控元件(GTR,GTO,MOSFET,IGBT)D:续流二极管,L和C组成LPF。
图3.2.1 降压斩波电路的原理图当t∈[0—DT]时,控制信号使得T导通,D截止,向L充磁,向C充电;当t∈[DT--T] 时,T截止,D续流,U0靠C放电和L中电流下降维持。
图3.2.2降压斩波电路工作分解图图3.2.3降压斩波电路工作主要波形至一个周期Ts结束,再驱动T导通,重复上一周期的过程。
当电路工作于稳态是,负载电流在一个周期的初值和终值相等。
负载的电的平均值为:(其中Ton为V处于导通的时间,T为开关周期)由上式可知,输出到负载的电压平均值Uo最大为E,若减小占空比,Uo将随之减小,因此该电路称为将压斩波电路,也称为Buck变换器(Buck converter)负载电流平均值为:若负载重L值较小,则在T关断后,负载电流可能会衰减至零,会出现负载电流断续的情况,负载电压Uo平均值会被抬高,一般不希望出现电流断续的情况。
3.3 PWM控制的基本原理PWM(Pulse Width Modulation)控制——脉冲宽度控制技术,通过一系列脉冲的宽度进行调制,来等效的获得所需要的波形(含形状和幅值)。
PWM控制技术在逆变电路中应用最广,生产中应用的逆变电路绝大部分是PWM型,PWM控制技术正是依赖在逆变中的应用,才确定在电力电子技术中的主导地位。
其基本等效原理是:冲量相等而不相同的窄脉冲加在具有惯性的环节上时,其效果基本相同。
冲量指窄脉冲的面积。
效果基本相同,是指环节的输出响应波形基本相同。
低频段非常接近,仅在高频段略有差异。
图3.3形状不同而冲量相同的各种窄脉冲第四章MATLAB仿真模型的建立4.1 MATLAB仿真软件介绍simulink是一个用来对动态系统进行建模、仿真和分析的软件包。
它支持线性和非线性系统连续和离散时间模型,或者是两者的混合。
在建模上,simulink提供了一个图形化的用户界面(GUI),可以用鼠标点击拖拉模块的图标建模。
从建模角度讲,既适于自上而下(Top-down)的设计流程(概念、功能、系统、子系统直至器件),又适于自下而上(Bottom-up)的逆程设计。
在MATLAB中,可直接在simulink环境中运作的工具包很多,覆盖通信、控制、信号处理、DSP、电力系统等诸多领域,所涉内容专业性极强。
同时由于可以利用其进行仿真,为科学实验带来了极大的方便,促进了其进一步发展。
本实验主要采用MATLAB_R2009a版,在simulink中简单仿真BUCK电路模型、直流电机转速的函数模型,并进行仿真运行,调节观测控制参数。
4.2 Buck电路模型的搭建图4.1.1 Buck电路的开环仿真模型其中电感值设为1.5mH,电容30μF,负载电阻8.1Ω,输入电压15V时实验仿真得到的波形如下:图4.1.2占空比为80%时发脉冲及输出电压的波形图4.1.3占空比为50%时触发脉冲及输出电压的形分析实验所得波形:当占空比为80%时,根据Buck电路输出电压与占空比的关系可知,输出电压应该为12V,由波形可知,所得正弦波幅值为11.06V左右;当占空比为50%,输出应为7.5V 实际输出为6.6V左右,且波形有一定的失真,这时由于电容,电感作用的原因。
其中用的开环系统中的S函数产生PWM波的函数如下:function [sys,x0,str,ts] = pwm(t,x,u,flag,T) switch flag,case 0,[sys,x0,str,ts]=mdlInitializeSizes(T);case 3,sys=mdlOutputs(t,x,u,T);case 4,sys=mdlGetTimeOfNextVarHit(t,x,u,T); case{1,2,9},sys=[];otherwiseerror(['Unhandled flag = ',num2str(flag)]); endfunction [sys,x0,str,ts]=mdlInitializeSizes(T) sizes = simsizes;sizes.NumContStates = 0;sizes.NumDiscStates = 0;sizes.NumOutputs = 1;sizes.NumInputs = 1;sizes.DirFeedthrough = 1;sizes.NumSampleTimes = 1;sys = simsizes(sizes);x0 = [];str = [];ts = [-2 0];function sys=mdlOutputs(t,x,u,T)if t-fix(t/T)*T==0sys=sign(u);elsesys=0; endfunction sys=mdlGetTimeOfNextVarHit(t,x,u,T) if mod(t,T)==0&abs(u)>0 H=abs(u)*T;disp('b'); elseH=T-mod(t,T);disp('c'); enddisp([H,u,t]); sys=t+H;4.3 Buck 变换器在电机拖动控制系统中的设计与仿真 4.3.1直流电机的数学模型由直流电机的机械特性方程:0d d U I R E -=及1eE n C =可得直流电机的数学模型如下图所示:图4.3.1 直流电机的数学模型4.3.2系统在开环情况下的仿真图4.3.2.1 Buck变换器带电机负载的仿真模型其中仿真模型中,直流电机负载采用简化的数学模型进行建模。