Buck变换器环路设计(修改)
BUCK变换器环路稳定性分析与仿真
Io
=
1 T
×
1 2(∆i on Ton
+ ∆i'off To'ff
-3-
现象。图 1.4 为电感电流断续时电流波形图。
由式 1-2 与式 1-4 可知,当输入电压和输出电压一定时, ∆i 为常数。由式 1-6 可见,当负载电流减少
到 iomin = 0 时, iomax = ∆i ,此时最小负载电流 Iomin ,即为电感临界连续电流 IG :
IG
=
Iomin
=
di 0 − Uo = L dt
电感中的电流线性下降,式 1-3 可写成:
Uo
= −L iomin − iomax Toff
= L iomax − iomin Toff
= L ∆ioff Toff
(式 1-2) (式 1-3) (式 1-4)
式中 Toff 为开关管 Q 的关断时间。在稳态时, ∆ioff = ∆ion = ∆i ,联解式 1-2 与式 1-4 可得:
Saber 仿 真 作 业
Buck 变换器的设计与仿真
目录
1 Buck 变换器技术...................................................................................................................................... - 2 1.1 Buck 变换器基本工作原理...........................................................................................................- 2 1.2 Buck 变换器工作模态分析...........................................................................................................- 2 1.3 Buck 变化器外特性.......................................................................................................................- 4 -
Buck变换器设计
De s i g n of Buc k c o nv e r t e r
Li u Y a ng
( S o u t h w e s t e r n U n i v e r s i t y C o l l e g e o f c o m p u t e r a n d i n f o r m a t i o n s c i e n c e a n d a u t o m a t i o n( c o n t r o 1 ),
主要是靠S G 3 5 2 5 芯片完成 的 ,而在反馈 回路 中则 加入 了超
前一 滞后 校正器 ,从 而使 变换器拥有更好 的动态性能 。
路 叫做直 流一 直流 变流 电路 ,包括 直接直 流变流 电路和 间 接 直流变 流 电路 。其 中直 接直流变 流 电路 也称斩 波 电路 。 直 流斩波 电路包括 降压斩 波电路 、升压斩 波 电路 、升降压
2 o , 3 . o 9
表1设计 参数数据表
电源 电压 开关频率
输 出 电压
根 据课 题要求 ,输入 电压 为2 5~3 0 V,这 里我们 选定
为2 8 V。因为输入 = 2 8 V,输 出 = 1 0 V,所 以D = 0 . 3 5 7 。
2 5 ~3 0 V 3 5 k H Z
C h o n g q i n g 4 0 0 1 7 5 )
Abs t r a c t : DC c h o p p e r c i r c u i t i s wi d e l y u s e d i n t h e i f e l d o f p o we r e l e c t r o n i c s a p p h c a io f n s ,p l a y i n g a c r u c i a l r o l e
BUCK变换器设计

BUCK变换器设计1设计目的及解决方案1.1问题的提出此次设计的目的是针对给定的特定题目要求,设计一个BUCK变换器DC/DC变换器,使其实现输入电压为DC 28V±10%时,输出电压为DC 12V,输出电流为2A,电压纹波为1%。
1.2设计方案此次设计主要是针对BUCK变换器的主电路进行设计,所选择的全控型器件为P-MOSFET.查阅相关资料,可以使用以脉宽调制器SG3525芯片为主的控制电路来产生PWM控制信号,从而来控制P—MOSFET的通断.然后通过设计以IR2110为主芯片的驱动电路对P-MOSFET进行驱动,电路需要使用两个输出电压恒定为15V的电源来驱动两个芯片工作。
图1。
1 总电路原理框图同时采用电压闭环,将输出电压进行分压处理后将其反馈给控制端,由输出电压与载波信号比较产生PWM信号,达到负反馈稳定控制的目的,得到电路的原理框图1.1所示.2.电路基本结构及降压原理2.1电路基本结构下图1.2所示为BUCK型DC/DC变换器的基本结构,此电路主要由虚线框内的全控性开关管T和续流二极管D以及输出滤波电路LC构成。
对开关管T进行周期性的通、断控制,便能将直流电源的输入电压Vs变换成为电压Vo输出给负载。
图2。
1 Buck变换器的电路结构2.2电路降压原理在一个开关周期T s期间对开关管T施加如图1.1(b)所示的驱动信号V G,在T on期间,V G〉0,开关管T处于通态,若忽略其饱和压降,输出电压Uo等于输入电压;在Toff期间,V G=0,开关管T处于断态,若忽略开关管的漏电流,输出电压为0。
开关管T导通时间与周期T s的比值称为占空比D,即D=T on/T s。
因此Vo=DVs,所以可以通过调节占空比D的大小,便可调节输出直流电压的大小,从而也就达到了降压的目的。
3 BUCK 变换器参数设计3.1 Buck 变换器性能指标输入电压:V in =DC 28V ±10%;输出性能:V out =DC 12V 、I o =2A ;Iout=0.1A 时,电感电流临界连续。
开关电源(Buck电路)的小信号模型及环路设计

不妨设电压环带宽远低于电流环,则在分析电流环时Vcv为常数。当Vc的上升斜率等于三角波斜率时,在开关频率fs处,电流误差放大器的增益GCA为
GCA=GCA(Vo/L)Rs=Vsfs(18)
GCA=/(Rs)=VsfsL/(UoRs)(19)
开关电源(Buck电路)的小信号模型及环路设计
0 引言
设计一个具有良好动态和静态性能的开关电源开关电源时,控制环路的设计是很重要的一个部分。而环路的设计与主电路的拓扑和参数有极大关系。为了进行稳定性分析,有必要建立开关电源完整的小信号小信号数学模型。在频域模型下,波特图提供了一种简单方便的工程分析方法,可用来进行环路增益的计算和稳定性分析。由于开关电源本质上是一个非线性的控制对象,因此,用解析的办法建模只能近似建立其在稳态时的小信号扰动模型,而用该模型来解释大范围的扰动(例如启动过程和负载剧烈变化过程)并不完全准确。好在开关电源一般工作在稳态,实践表明,依据小信号扰动模型设计出的控制电路,配合软启动电路、限流电路、钳位电路和其他辅助部分后,完全能使开关电源的性能满足要求。开关电源一般采用Buck电路,工作在定频PWM控制方式,本文以此为基础进行分析。采用其他拓扑的开关电源分析方法类似。
由式(11),式(12)得
=Uin (13)
=· (14)
式(13),式(14)便为Buck电路在电感电流连续时的控制-输出小信号传递函数。
2 电压模式电压模式控制(VMC)
电压模式控制方法仅采用单电压环进行校正,比较简单,容易实现,可以满足大多数情况下的性能要求,。
L=D(Uin-Uo)+(1-D)(-Uo)=DUin-Uo (3)
稳态时,=0,则DUin=Uo。这说明稳态时输出电压是一个常数,其大小与占空比D和输入电压Uin成正比。
buck型dc-dc变换器中保护电路的设计

buck型dc-dc变换器中保护电路的设计buck型DC-DC变换器广泛用于电源供电系统、电动汽车和太阳能电池等应用中。
在使用过程中,由于输入电压的变化、电流过载、短路等因素可能导致变换器的故障或损坏。
为了保护变换器及其连接的电路,设计有效的保护电路是至关重要的。
首先要保护的是输入端的电路,常见的保护电路包括过压保护和过流保护。
过压保护主要是通过输入电压检测电路来监测输入电压,一旦输入电压超过设定值,保护电路将切断输入电源,以防止变压器和其他电路被损坏。
过流保护则采用电流检测电路来监测输入电流,一旦输入电流超过设定值,保护电路将切断输入电源,防止变压器和电源电路受到额定电流以外的过大电流的损坏。
在输出端,常见的保护电路包括过压保护、过流保护和短路保护。
过压保护通常使用电压检测电路来监测输出电压,一旦输出电压超过设定值,保护电路将切断输出电源,以防止负载和其他电路被损坏。
过流保护同样采用电流检测电路来监测输出电流,一旦输出电流超过设定值,保护电路将切断输出电源,防止负载和电源电路受到过大的电流的损坏。
短路保护是最常见的保护电路,它主要通过短路检测电路来检测输出端是否出现短路。
一旦短路发生,保护电路将切断输出电源,以防止损坏变压器和其他电路。
此外,为了保护变压器的绝缘性能,在变压器的输入和输出端都需要设计绝缘保护电路,通常是使用绝缘变压器或光耦合器来实现。
为了确保电路的稳定工作和提高变换器的效率,还可以设计过温保护电路。
过温保护电路可以通过温度传感器实时监测变换器内部的温度,一旦温度达到设定值,保护电路将切断输入电源,以防止温度过高引起的故障或损坏。
另外,还可以考虑设计过载保护电路和反馈保护电路。
过载保护电路可以检测输出电流是否过大,一旦超过设定值,保护电路将采取控制措施,减小输出电流以避免过载。
反馈保护电路可以通过比较输出电压与参考电压的差异来检测电路的故障,一旦差异超过设定值,保护电路将切断输入电源。
Buck变换器环路设计(修改)
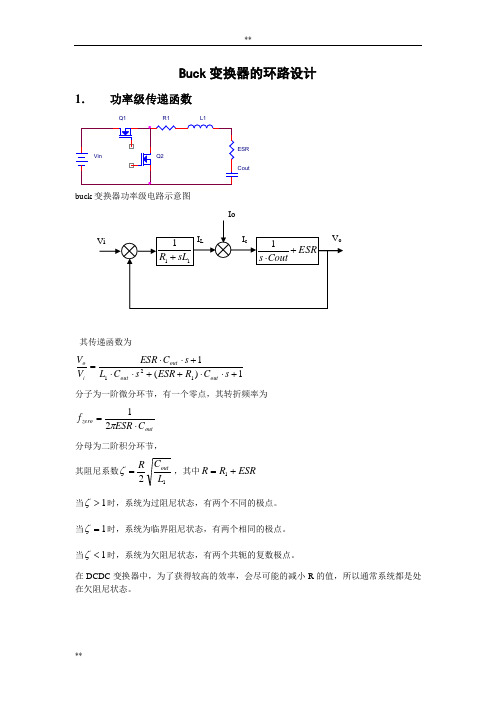
Buck 变换器的环路设计1.功率级传递函数R1L1Q1buck 变换器功率级电路示意图其传递函数为1)(1121+⋅⋅++⋅⋅+⋅⋅=s C R ESR s C L s C ESR V V out out out i o 分子为一阶微分环节,有一个零点,其转折频率为outzero C ESR f ⋅=π21分母为二阶积分环节,其阻尼系数12L C R out=ζ,其中ESR R R +=1当1>ζ时,系统为过阻尼状态,有两个不同的极点。
当1=ζ时,系统为临界阻尼状态,有两个相同的极点。
当1<ζ时,系统为欠阻尼状态,有两个共轭的复数极点。
在DCDC 变换器中,为了获得较高的效率,会尽可能的减小R 的值,所以通常系统都是处在欠阻尼状态。
10210310410520102103104105典型的buck 变换器功率级幅频和相频特性曲线。
参数:Cout=100uF ,L1=2.2uH ,ESR=1m Ω,R1=10m Ω在功率级的传函中,有一个由ESR 和Cout 构成的零点。
当ESR 比较小时,幅频曲线在转折频率后会以-40db/dec 衰减,相频曲线也会由0deg 急剧的下降为-180deg 。
在控制回路的环路补偿中就必须增加额外的相位超前补偿,否则不能满足要求的相位裕度。
当ESR 较大时,由ESR 和Cout 组成的零点会抵消到一个极点,控制回路中不需要额外的相位超前补偿,就能满足要求的相位裕度。
下图为ESR=100m Ω(其余参数相同)的幅频和相频特性曲线。
可以看出,其相位最低降到-100deg ,尚有80deg 的相位裕度。
1021031041050101021031041052. PWM 控制级传递函数在电压反馈系统中,PWM 控制器采用固定的三角波与反馈回来的电压比较,控制占空比。
三角波的周期为T ,上升段的时间为T 1,幅值为△V ,则,TT V V D K compPWM 11⋅∆==3. 环路补偿为获得比较高的稳态精度,系统总是要设计成为I 型系统,因为I 型系统的稳态误差为零。
BUCK环路设计
uC (t1) = 2tat1
(1)
VOSC
T
uC (t2 ) = 2tt2b
(2)
VOSC
T
uC (t1) + uC (t2 ) = tat1 + tt2b
(3)
2VOSC
T
tat1 + tt2b = tON
(4)
uC
(t1
)
+ 2
uC
(t2
)
=
uC
(tab
)
,为该周期内误差信号的平均值,
tON = VIN
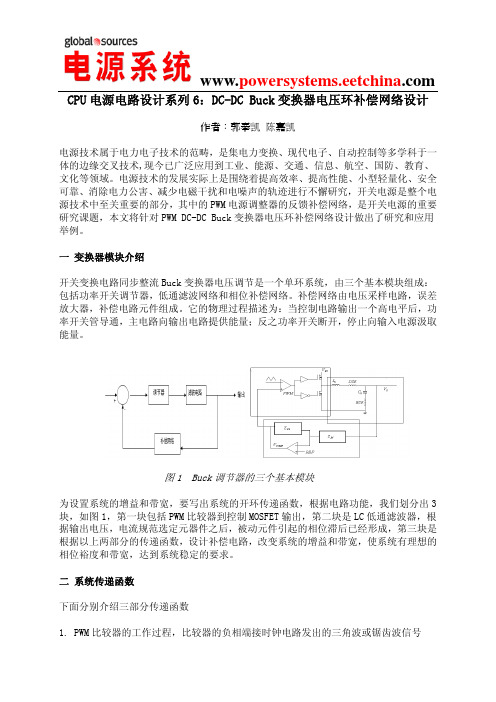
图 1 Buck 调节器的三个基本模块 为设置系统的增益和带宽,要写出系统的开环传递函数,根据电路功能,我们划分出 3 块,如图 1,第一块包括 PWM 比较器到控制 MOSFET 输出,第二块是 LC 低通滤波器,根 据输出电压,电流规范选定元器件之后,被动元件引起的相位滞后已经形成,第三块是 根据以上两部分的传递函数,设计补偿电路,改变系统的增益和带宽,使系统有理想的 相位裕度和带宽,达到系统稳定的要求。
但如果没有电压的下调电压,总体瞬态漂移则为 2 ΔV 。
根据以上的设计原则,补偿部分的设计步骤是:把系统的性能指标和技术要求转化为开 环传递函数的波特图;根据开环传递函数的波特图和控制器,LC 滤波网络的波特图绘制 补偿网络的波特图;基于补偿网络的波特图,选择合适的补偿网络进行参数设计。
3.1 三个频段分析
在定性的分析系统性能时,可以将波特图大致分为低,中,高三个频段。
1)低频段 开环传递函数频率特性低频段的形状直接反映系统包含的积分环节的个数和直流增益 的大小,因此它主要影响系统的稳态性能。对于开关调节系统,理想的低频特性是直流 增益无限大。以-20DB 的斜率下降。
buck电路设计

Buck变换器设计——作业一.Buck主电路设计1.占空比D计算2.电感L计算3.电容C计算4.开关元件Q的选取二. Buck变换器开环分析三. Buck闭环控制设计1.闭环控制原理2.补偿环节Gc(s)的设计——K因子法3.PSIM仿真4. 补偿环节Gc(s)的修正——应用sisotool5.修正后的PSIM仿真四.标称值电路PSIM仿真五.设计体会Buck变换器性能指标:输入电压:标准直流电压48V,变化范围:43V~53V输出电压:直流电压24V ,5A 输出电压纹波:100mv 电流纹波:0.25A 开关频率:fs=250kHz 相位裕度:60 幅值裕度:10dB一. Buck 主电路设计:1.占空比D 计算根据Buck 变换器输入输出电压之间的关系求出占空比D 的变化范围。
.50V48V 24U U D .4530V 53V 24U U D 0.558V 43V24U U D innom o nommax in o minmin in o max =========2.电感L 计算uH 105f i 2)D U -(U i 2)T U -(U L sL min o inmax Lon(min)o inmax =∆=∆=3.电容C 计算uF25.1250000*1.0*825.0vf 8i C s L ==∆∆=电容耐压值:由于最大输出电压为24.1V ,则电容耐压值应大于24.1V 。
考虑到能量储存以及伏在变化的影响,要留有一定的裕度,故电容选取120uf/50V 电容。
4.开关元件Q 的选取该电路的输入电压是43V~53V ,则开关管耐压值为53V ,电流的最大值为A 25.525.0A 5i I I L o Qp =+=∆+=,其开关频率为KHz 250f =,因此选用的MOSFET 管MTD6N15T4G ,其额定值为A 6/V 150。
Buck 主电路传递函数Gvd (s )占空比d (t )到输出电压Vo (t )的传递函数为:220zinvd /s Q /s 1/s 1U )s (G ωωω+++=其中,CR 1,)C R R /L (1Q ,/R)R LC(11esr z esr 0esr 0=+=+=ωωω取R esr=50m Ω,负载R=4.8Ω,又知L=105uH ,C=120uF ,可求得ω0=8862.7rad/s ,f 0=ω0/2π=1410.5Hz ,Q=4.0269,ωz=166670rad/s ,fz=ωz/2π≈26526Hz 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Buck 变换器的环路设计
1.
功率级传递函数
R1
L1
Q1
buck 变换器功率级电路示意图
其传递函数为
1
)(1121+⋅⋅++⋅⋅+⋅⋅=s C R ESR s C L s C ESR V V out out out i o 分子为一阶微分环节,有一个零点,其转折频率为
out
zero C ESR f ⋅=
π21
分母为二阶积分环节,
其阻尼系数1
2L C R out
=
ζ,其中ESR R R +=1
当1>ζ时,系统为过阻尼状态,有两个不同的极点。
当1=ζ时,系统为临界阻尼状态,有两个相同的极点。
当1<ζ时,系统为欠阻尼状态,有两个共轭的复数极点。
在DCDC 变换器中,为了获得较高的效率,会尽可能的减小R 的值,所以通常系统都是处在欠阻尼状态。
10210
3
10
4
10
5
20
10
210
3
10
4
10
5
典型的buck 变换器功率级幅频和相频特性曲线。
参数:Cout=100uF ,L1=2.2uH ,ESR=1m Ω,R1=10m Ω
在功率级的传函中,有一个由ESR 和Cout 构成的零点。
当ESR 比较小时,幅频曲线在转折频率后会以-40db/dec 衰减,相频曲线也会由0deg 急剧的下降为-180deg 。
在控制回路的环路补偿中就必须增加额外的相位超前补偿,否则不能满足要求的相位裕度。
当ESR 较大时,由ESR 和Cout 组成的零点会抵消到一个极点,控制回路中不需要额外的相位超前补偿,就能满足要求的相位裕度。
下图为ESR=100m Ω(其余参数相同)的幅频和相频特性曲线。
可以看出,其相位最低降到-100deg ,尚有80deg 的相位裕度。
102103
104
10
5
01010
210
310
4
10
5
2. PWM 控制级传递函数
在电压反馈系统中,PWM 控制器采用固定的三角波与反馈回来的电压比较,控制占空比。
三角波的周期为T ,上升段的时间为T 1,幅值为△V ,则,
T
T V V D K comp
PWM 1
1⋅∆=
=
3. 环路补偿
为获得比较高的稳态精度,系统总是要设计成为I 型系统,因为I 型系统的稳态误差为零。
这样就可以获得比较高的负载调整率和电压调整率。
这样就要在环路中引入一个积分环节,使系统的直流增益变为无穷大。
然而,由于积分环节的相位为-90deg ,所以,同时由减小了相位裕度,使带宽比较窄,或者系统变得不稳定。
所以一般的会采用PI 调节器,使系统保持高的稳态精度的同时,还能有一个比较好的动态响应。
典型的PI 调节器的电路如下图所示。
V
∆
C1
R2
其传递函数如下,
s
C R s C R V V i o ⋅⋅+⋅⋅=11121
典型的PI 调节器幅频、相频特性曲线。
参数值为R1=1K ,R2=5.1K ,C1=0.01uF 其转折频率为
1
221
C R f ⋅⋅=
π
由功率极的传函可以看出,当ESR 比较小时,相位会滞后180deg 。
而单纯的PI 调节器没有相位补偿的功能。
而且还会造成一定程度的相位滞后。
所以需要增加相位超前补偿电路。
典型的相位超前补偿电路如下图所示。
虚线中的C1与R1+R2会产生一个零点,C1与R2会产生一个零点。
两个转折频率分别是,
2
1221
R C f ⋅⋅=
π
这部分的传函为
1
1
)(1)(121211+⋅⋅+⋅⋅+=
s C R s C R R R s F
整个环路补偿电路的传函为
s
C R s C R s C R s C R R V V i o 212312121111)(+⋅+⋅⋅+⋅⋅+= 典型的幅频相频曲线如下图。
其中的参数R1=12.4k ,R2=1k, C1=2.2nF, R3=8k, C2=0.01uF 。
)
(21
2111R R C f +⋅⋅=
π
10210
3
10
4
10
5
05101520
2510
210
3
10
4
10
5
020
40
60
102103
104
10
5
010203010
210
3
10
4
10
5
50
buck 变换器的环路设计步骤。
1. 根据效率、纹波以及成本、加工工艺的要求,初步选定输出滤波电感和电容。
同时电容的ESR 和电感的DCR 都已知,根据MOSFET 的Rds (on )还有PCB 的大小、形状、铜箔
厚度等可以估算出PCB 的导通电阻。
从而可以确定buck 变换器功率级的基本参数。
2. 根据输出滤波电感L 和电容C ,计算其复合极点频率。
LC
f o π21=
计算由ESR 引起的零点的频率
C
ESR f ⋅⋅=
π21
1
3. 初步确定带宽c f ,根据这两个频率点可以计算出整个环路的高频增益K 。
当1f <c f 时,)log(40)log(
20log 20011f f f f K c += 当1f ≥c f 时,)log(
40log 200
f f K c
= 4. 一般的分压电阻R1是通过要求的输出电压、电压基准以及模块的输出电压TRIM 特性获得的。
通过R1、Kpwm 和输入电压Vin ,可以计算出R3。
in pwm V K R R K ⋅⋅=
1
3
5. 计算C2,C2与R3构成一个零点,目的是增大低频段的增益,而又不对高频段的相位产生影响。
这个零点的转折频率为
2
321
2C R f ⋅⋅=
π
要使其不对整个环路的相位裕度产生影响,2f <
10
c
f ,但2f 取得过小,会降低整个环路的低频增益。
所以一般的取2f =
10
c
f 。
通过上式,可以算出C2的值。
6. 至此,整个环路上的参数已经基本上确定了。
可根据所得的参数绘制系统的幅频曲线和相频曲线,得到系统相位裕度和幅值裕度已经穿越频率。
当1f <c f 时,环路的幅值裕度和相位裕度基本上就能满足要求。
不需要再增加另外的补偿。
有时为了减小高频干扰,提高系统的稳定性(主要是提高其幅值裕度),会在C3的位置上加一个电容,使其转折频率3
321
5C R f ⋅⋅=
π满足c f <5f <<s f 。
取值的原则为尽量减小对
相位裕度的影响,同时又尽可能的提高环路的幅值裕度。
通常为这两个指标的折衷。
当系统的相位裕度较大,幅值裕度较小时,4f 宜取的小些,反之,宜取的大些。
当1f 大于于c f 时,相位裕度是满足不了系统要求的相位裕度的。
需要增加超前相位相位补偿。
抬高系统的相位裕度。
假设两个转折频率分别为3f 和4f ,超前补偿抬高的幅值为
)log(
1034f f ,补偿的相位为3
4log 45f f
(4f <203f ),相位最高点的频率为43f f ⋅,根据
抬高的幅值和需要补偿的相位,可以在系统环路的幅频和相频曲线上找到相位最高点
43f f ⋅,然后再通过式3
4
log
45f f ,计算出3f 和4f 。
相位超前补偿参数很难精确的计算出来。
可以通过上面的分析,大概计算出3f 和4f ,在通过软件进行微调。
经过相位超前补偿的环路带宽会增加,可以通过减小R3的值,同时保持R3×C2的值不变,来降低系统的带宽。
并可以保持相频曲线不变。
更简单的方法是使3f =0f (复合极点), 3
3421
C R f π=
(ESR 与输出电容C 引起的零点),这
样一定可以使系统相位裕度和幅值裕度满足要求,但同时也使系统的动态响应有所降低。
在对动态响应要求不苛刻的情况下,可以使用这种方法,简化环路的设计。