机器人手指单舵机(QDS4015)组装教程
众灵科技舵机使用手册

众灵科技舵机使用手册摘要:1.众灵科技舵机的概述2.众灵科技舵机的安装与设置3.众灵科技舵机的使用技巧与注意事项4.众灵科技舵机的维护与故障排除5.众灵科技舵机的技术参数与规格正文:【众灵科技舵机的概述】众灵科技舵机,全称众灵科技舵机控制器,是一种高性能的舵机控制器,适用于各种遥控模型、机器人和智能家居设备。
它采用先进的控制算法和技术,为用户提供精准、稳定的控制体验。
【众灵科技舵机的安装与设置】在安装众灵科技舵机之前,请确保您已详细阅读产品说明书。
安装过程如下:1.根据设备需要,选择合适的舵机型号。
2.将舵机与设备主体连接,确保连接处牢固。
3.连接电源,检查舵机是否正常工作。
4.使用配套的遥控器或控制器,对舵机进行初始化设置。
【众灵科技舵机的使用技巧与注意事项】在使用众灵科技舵机时,请注意以下几点:1.熟悉遥控器或控制器的操作方法,确保能够精准控制舵机。
2.在使用过程中,避免舵机受到剧烈冲击或长时间工作,以免影响使用寿命。
3.定期检查舵机的连接处,确保连接牢固。
4.如遇异常情况,请立即停止使用,并联系专业技术人员进行处理。
【众灵科技舵机的维护与故障排除】在使用众灵科技舵机的过程中,可能会遇到一些故障。
以下是一些常见故障及排除方法:1.舵机无法正常工作:请检查电源连接是否正常,遥控器或控制器是否存在故障。
2.舵机运行不稳定:请检查连接处是否牢固,遥控器或控制器的操作是否准确。
3.舵机出现异常声音:请检查舵机内部是否有异物,或轴承是否损坏。
【众灵科技舵机的技术参数与规格】众灵科技舵机具有以下技术参数和规格:1.工作电压:DC 4.8-7.4V2.工作电流:100-150mA3.旋转角度:90°-360°4.信号接收频率:2.4GHz-2.5GHz5.外形尺寸:根据不同型号,具体尺寸会有所不同通过以上介绍,相信您已经对众灵科技舵机有了全面的了解。
6自由度云台机械手组装教程PWM舵机版
大圆盘
1个
舵机
1个
M4*10 螺丝 4 个
M4 螺母 4 个
圆环 M4*35 螺丝
M4*13 铜柱
正面
反面
正面
M4*10 螺丝 M4 螺母
反面
注:此过程是 将舵机卡进舵 盘里面,注意 舵机的方向
正面
侧面
M4*35 铜柱 4 个
M4*35 铜柱
底座部分
底板组合
1个
云台组合
1个
M4*10 螺丝 4 个
底座部分 1 个 长臂部分 1 个 M3*6 螺丝 4 个
整体装配
M3*6 螺丝
正面
小臂部分 1 个 M3*6 螺丝 4 个
正面
侧面 M3*6 螺丝
侧面
M3*6 螺丝
手腕部分 1 个 M3*6 螺丝 4 个
手爪
1个
舵盘
1个
M3*6 螺丝 3 个
M3*8 螺丝 2 个
正面 M3*6 螺丝
侧面 舵盘
杯式轴承
M3*8 螺丝 M3 螺母
1个 1个 1 个 M3*8 螺丝
杯式轴承
把舵盘卡进去 注意两孔连线 分别处于水平 及垂直位置
反面
M3 螺母
舵机
2个
舵盘
2个
M4*10 螺丝 8 个
M4 螺母
8个
正面
反面
把舵盘卡进去 注意两孔连线 分别处于水平 及垂直位置
把舵盘卡进去 注意两孔连线 分别处于水平 及垂直位置
注:圆盘位置需 严格按照此图摆 放安装(注意左 右孔位)
正 面
反 面
杯式轴承
杯式轴承 1 个 M3*8 螺丝 1 个 M3 螺母 1 个
M3*8 螺丝 M3 螺母
自由度云台机械手组装教程

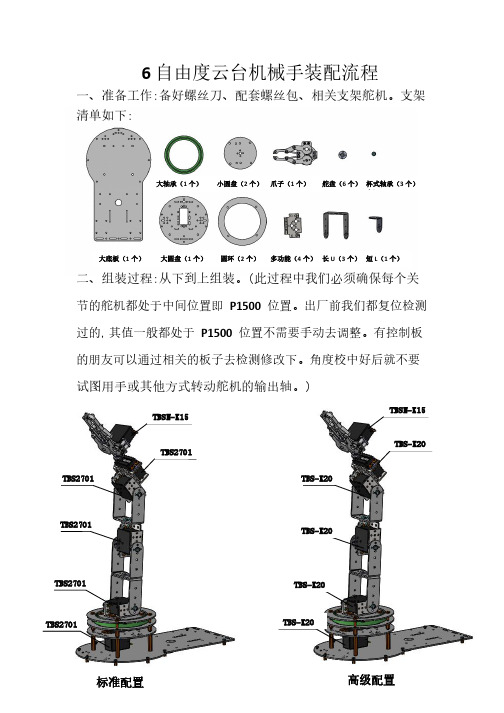
6自由度云台机械手装配流程一、准备工作:备好螺丝刀、钳子、配套螺丝、相关支架。
二、组装过程:从下到上组装。
(此过程中舵机角度值应在中间即P1500位置,正常收到的舵机其值一般都处于这个位置,无需调整,您可以先用舵机控制器试下,可能个别的需要通过舵机控制器调整到P1500位置)1.我们先从底座开始组装。
首先拿出转盘轴承、M3x6铜柱、M3x10铜柱、杯士轴承、M3x12螺丝、M3x14螺丝。
按下图方式组装好。
2.再拿出底板跟一个舵机(最好选用DS3115数字舵机),配相应的M4x12螺丝跟M4螺母用螺丝刀跟十字套筒组装在一起;如下图3.再将上面装好的转盘跟这个圆盘舵机装在一起,准备好M3x20螺丝、M4螺母、M3X40铜柱。
如下图:4.组装好后,如下图:5.拿出一个舵盘跟长支架装在底盘上的舵机上,如下图:注意上面舵盘跟长支架的安装位置。
6.拿出上圆盘跟一个多功能支架,按下图所示装在一起:7.把上面两部分组装在一起如下图所示:8.再把底板装上9.取出一个舵机(最好选用DS3115数字舵机)装在上面盖板位置如下图:10.拿出两个长U支架,如下图组装在一起并装在上面那个舵机上。
11.拿出一个长U一个多红能支架还有一个短L,按下图方式进行组装:先用M3x8螺丝跟M3螺母把长U跟短L装在一起再拿出多功能支架按下图组装注意方向。
装好后放一个M3x10螺丝在上图位置。
7.拿出一个MG996R舵机用M3X10螺丝按下图组装:固定好后用M3x6的螺丝锁住舵盘,舵盘的位置按图示摆放,两孔连线处于水平跟垂直位置。
9.将上面的支架装在之前的机械手架子上,跟上面装法一样装好杯士轴承螺丝。
如下图:10.拿出两个多功能支架及两个MG996R舵机组装在一起。
如下图:先把两个多功能支架用M3x6螺丝跟M3螺母固定在一起。
在图示位置放一个M3x10螺丝(注意两个支架位置方向)再装两个舵机及舵盘。
注意舵盘安装孔的方向跟之前讲的一样11.再将上面组合装在前面装好的支架上。
D系列川崎机器人 安装连接手册.
4.1使用吊车..................................................................14
4.2使用叉车..................................................................15
本手册只说明了控制单元的安装与连接、接线及其初级电源(主电源。机器人手臂的相关信息请参阅下列手册。
“安装和连接手册=机器人手臂=”
1.本手册并不构成对使用机器人的整个应用系统的担保。因此,川崎公司将不会对使用这样的系统而可能导致的事故、损害和(或与工业产权相关的问题承担责任。
2.川崎公司郑重建议:所有参与机器人操作、示教、维护、维修、点检的人员,预先参加川崎公司准备的培训课程。
3.无灰尘、烟雾、水、油等。(控制箱保护等级:IP53
(除主空气开关的把手、变压器和散热片部分外。见下图。
4.无易燃、腐蚀性液体和气体。
5.无有过大的振动。
6.无电气干扰。
(控制箱初级电源电气噪声:小于1KV/1μs
7.电源供电电压在规定范围内。(变化在+/-10 %以内
8.具备专用接地线。(100 Ω以下
9.安装位置位于机器人(带手爪或射枪的运动范围外(至少1 m、安全围栏的外边。
也需满足下列条件:
具备足够空间,以便在维修时进入控制箱。
安全围栏上,安装带有安全插销的进口。
关于安全围栏的技术细节,请参考对各区域的具体要求。
(例如EN953、EN294、EN811、EN1088、ISO13852、ISO13854和ISO/NP14120
机械手安装教程基础版

机械手安装教程基础版首先我们来到神奇的机械时代。
机械与电子无比紧密结合的时代。
首先,我们所制作的机械手是由3D打印机打印的。
所以随时都可能改型。
对于图片与实物不符请同学们不要惊讶。
在安装机械手之前我们要学一下动力部件的控制方法。
本机械手使用的是航模舵机作为动力部件。
舵机有很多规格,但所有的舵机都有外接三根线,分别用棕、红、橙三种颜色进行区分,由于舵机品牌不同,颜色也会有所差异,棕色为接地线,红色为电源正极线,橙色为信号线。
舵机的转动的角度是通过调节PWM(脉冲宽度调制)信号的占空比来实现的,标准PWM (脉冲宽度调制)信号的周期固定为20ms(50Hz),理论上脉宽分布应在1ms到2ms 之间,但是,事实上脉宽可由0.5ms 到2.5ms 之间,脉宽和舵机的转角0°~180°相对应。
有一点值得注意的地方,由于舵机牌子不同,对于同一信号,不同牌子的舵机旋转的角度也会有所不同。
下面我们来安装机械部分。
1底座底座下放有3个4mm的安装孔可以固定在任何物体的平面上。
在底座中心装一个舵机。
导线从线槽中穿过。
在舵机没有导线一侧安装一个螺钉(用自攻钉在舵机包装中有)。
拿出长条舵机臂按图方向装好,不要上螺丝。
(记住长条舵机臂方向)2圆盘看圆盘的背面有一个长条舵机臂形状的槽和两个M3螺母形状的槽。
现在向槽内装入两个M3螺母。
如果装不进去可用锉刀修一修。
再装上长条舵机臂。
一定要用锉刀修一修才能装进去,如果太松会影响机械手的转动精度。
将盘和底座装到一起(主要方向)。
为了防止M3螺母掉下可以用胶带固定。
装入自攻钉。
3上座拿出上座和圆盘结合安装上螺丝。
注意,悬出部分与导线方向相同4舵机压片修整舵机压片中间的孔将舵机装入。
为了方便装入可将商标去掉。
(修量比较大。
因为不同厂家的舵机尺寸有误差)将舵机调整到中间。
偏左30度装上短舵机臂。
5主臂用锉刀修主臂长孔使之能放下舵机短臂。
将上座的2个孔用4.2钻头钻一下用15mm长无头销将主臂与上座链接在上座装入舵机装上螺丝(不要旋转的太紧。
17_19轴(QDS4015)机器人安装组装教程

17、19轴机器人组装教程(PS2手柄按键示意图在本教程的最后面)机器人的整体安装调试包括4个步骤,1.舵机没上舵盘前舵机重置2.机器人安装3.舵机偏差调整4.动作组导入或动作组调试,程序编程。
组装成品图如下1、舵机没上舵盘前舵机重置拿到机器人先不要忙着组装,按照此图做好开关连线把电线做好接头并跟降压二极管连接上。
按照此图把各个器件跟舵机控制板连接好,并接好360MA跟1500MA的电池,打开总开关(注意图示没有接电池,实际组装要接电池)那边图示左边的串口板,将串口板用4P杜邦线跟舵机板连接,注意串口板上4P 排针头上的线序,数字对应1234接1234然后拿出MINI-USB线跟左边的串口板连接,并连接电脑,电脑通过串口板经过4P杜邦线跟舵机板通讯。
(注意主板跳线帽都置于USB)1、安装驱动(如果已经安装好驱动则直接跳过)使用USB线连接上舵机板串口板找到以下的驱动,这里可跳过安装然后打开驱动程序的相对应的CP2102驱动文件夹根据不同的系统安装驱动程序。
2、安装 Framewoks2.0,如果已经安装了或者有高版本的NetFramewoks 文件可跳过安装,如果没有安装这个文件则打不开上位机软件,如果能直接打开上位机软件则可不安装此文件。
WIN7或以上操作系统可直接跳过安装。
2、双击打开上位机软件Q-Robot_Servo_Control刷新COM口在下拉COM口中选择最新出来的COM口,波特率默认为115200,然后单击连接点击连接之后这里变为断开,说明已经连接上再单击全不选依次勾上0-11号舵机然后给舵机板0-11号舵机位置上各插上一个舵机,舵机排针S 接舵机线黄色、- 接舵机线棕黑色、+ 接舵机红色。
舵机先不要上舵盘先点击一次重置舵机然后下面以0号舵机为例左拖拉一次右边拉一次测试下舵机是否能正常工作,(此时舵机板红灯D2跟着同步闪动)依次左右拖拉0-11号舵机,测试下所有舵机能否正常工作。
舵机安装工艺
舵机安装工艺规范Workmanship Standard for Steering Gear Installation前言舵机安装工作是船舶建造过程中的重要工序之一,由于它技术要求高、施工难度大、安装质量难以控制,因此,倍受船东船检的重视。
为确保施工质量,特制定本标准。
本标准由公司标准化委员会提出。
本标准由船研所归口。
本标准起草单位:。
本标准起草人:舵机安装工艺规范1 范围本标准规定了柱塞式液压舵机(下称“舵机”)船上安装工作的前期准备和舵机船上安装工作的相关工艺要求。
本标准适用于我公司建造的各类船舶舵机船上安装工作的工艺文件编制、施工过程的监控以及施工质量的评审。
2 前期准备2.1 审阅相关图纸资料2.1.1 舵机安装图。
2.1.2 舵系布置图。
2.1.3 企业标准《船舶轮机安装质量要求》。
2.1.4 舵机设备资料。
2.1.5 其他资料。
2.2 主要工装2.2.1 大扎规。
2.2.2 大平尺。
2.2.3 调整顶丝等。
2.3 其它准备2.3.1眼冲子。
2.3.2 卡尺等常用量具。
3 舵机安装3.1 舵机安装定位的前提条件3.1.1 舵柄安装交验结束。
3.1.2 舵装置间隙交验结束。
3.1.3 舵叶角度处于零度。
3.2 舵机的找正3.2.1 将舵机按前、后段分别吊装于舵机基座上,用调整顶丝支撑好并进行初步调整。
3.2.2将舵机的中间定位块吊装就位,并与舵机的前、后段组装完整。
3.2.3检查舵叶零位的准确性,舵叶零位应确保无误。
3.2.4按图1和图2所示的要求将舵机仔细找正,找正过程中各有关参数的检测应交叉兼顾,确保各参数的准确。
3.2.5用大扎规分别检查“a”、“b”、“c”、“d”四个交叉尺寸的正确性,并用调整顶丝进行精确调整。
要求:a=b=c=d,允差不大于0.5mm。
3.2.6用大划卡分别检查“L1”、“L2”、“L3”、“L4”四个尺寸的正确性,并用调整顶丝进行精确调整。
要求:L1=L2=L3=L4,允差不大于0.5mm。
6自由度云台机械手组装教程PWM舵机版
M4 螺母
4个
多功能支架 2 个
M3*6 螺丝 4 个
M3 母
4个
手腕部分
正面
杯式轴承
M3*8 螺丝 M3 螺母
1个 1个 1 个 M3*8 螺丝
杯式轴承
把舵盘卡进去 注意两孔连线 分别处于水平 及垂直位置
反面
M3 螺母
舵机
2个
舵盘
2个
M4*10 螺丝 8 个
M4 螺母
8个
正面
反面
把舵盘卡进去 注意两孔连线 分别处于水平 及垂直位置
4个
长 U 支架 1 个
短 L 支架
1个
M3*8 螺丝 4 个
M3 螺母
4个
长臂部分
M3*8 螺丝
小臂部分
短 L 短边 短 L 长边
多功能支架 1 个
M3*8 螺丝 4 个
M3 螺母
4个
杯式轴承
1个
M3*8 螺丝 1 个
M3 螺母
1个
M3 螺母
M3*8 螺母 杯式轴承
M3 螺母
舵机
1个
舵盘
1个
M4*10 螺丝 4 个
M3*8 螺丝 2 个
正面 M3*6 螺丝
侧面 舵盘
正面
M3*8 螺丝
反面
M3*6 螺丝
正面
反面
螺丝紧固好
正面
反面
TBSN-K15 舵机 1 个
M3*8 螺丝
4个
M3*1 螺丝
1个
正面
反面
整体效果
试图用手或其他方式转动舵机的输出轴。)
TBSN-K15
TBSN-K15
TBS2701
TBS-K20
[扫盲帖]舵机的安装与调整-新手必看!Word版
本帖最后由大蒜头于2009-6-12 09:33 编辑
最近又看到有些新手不会连接舵机与舵面,比如“模型爱好者”就出现了舵面不在中立面的问题。
今天上个帖子,帮助帮助广大新手!
这是示意图,这是安装完的理想状态。
这是一个没有安装摇臂的舵机,现在教大家怎么确定中立位。
先装上摇臂,用手掰动它,摇臂处于两边最顶点,并且角度相差不大,这就是中立点。
但为什么还会有角度差异呢?因为摇臂是通过齿轮安装上去的,避免不了有点角度的差异,这是可以忽略的。
打开遥控器,接上电源,这时可以看到摇臂处于中立位了。
动一动看看,恩~~不错,不错。
这是连杆,要弯成这个样子,便于安装拆卸。
就是这么插进去的。
好啦,安装好了就可以拧上螺丝了,注意别拧太狠了哦
好啦,完成咯!~~怎么样?很简单吧~!
(注:可编辑下载,若有不当之处,请指正,谢谢!)。
机器人机械臂的安装方法
机器人是精密的配件。
工程科学讲的是严谨的步骤。
安装就像玩积木,需要一定的耐心和动手能力。
用自己的双手安装处属于自己的机器人,是一件很惬意的事情。
让我们开始完成机器人的旅程。
注意:青少年使用更需要在老师或者家长的监护下操作,以下列出了一些重要注意事项,希望客户和爱好者一定要遵守注意!(----)切忌电池(电源)短路,由于使用的航模电池和电源功率较大,一旦短路,轻则烧坏设备,重要引起火灾,甚至爆炸。
(----)切忌对电池充电过充,每款电池根据电池容量的不同充电时间不同,充电时候注意观看充电器指示灯状态,充满要及时拔除电池。
(----)航模电池使用时,不要过度放电,发现电量低的现象就要及时充电,过度放电影响电池使用寿命。
(----)伺服舵机安装在机械结构件上,结构有一定的运动范围,可能小于或者大于伺服舵机的运动角度范围,调试时候注意不要让电机堵转(就是电机卡住,没法再继续向调节的方向转动,往往与结构安装有关),调试机械手爪时候尤其要注意这一点,爪子的张开角度有限,而伺服电机的运动范围很大,最容易使电机堵转,时间稍长,电机就烧毁了。
(----)机械手臂上使用的电机都是大扭矩的,通电或者在操作时候注意手不要被夹住。
(----)伺服电机与控制器连接时候注意线序,不要插错正负极,伺服舵机的控制线:通常红色为正、黑色或棕色为负、黄色或白色为信号线。
机械臂的安装方法,找到两下图零件安装如图。
安装机械臂要注意舵机的角度,我们的舵机运动角度是0度到180度。
下图中左面的舵机安装以前要调整到90度位置。
可以用套件里面控制板调节,在软件界面上面1500处。
(调整方法参照控制板的说明书)舵机位置为90度。
夹子是散件发出的夹子的安装参照“夹子的安装方法”这一步要注意一定先按左面的舵机,后安装夹子的舵机。
夹子舵机调整到软件位置的2000处135度处。
如下图位置固定。
注意舵机调整好后先安装在夹子上面,后安装舵盘舵盘的小孔位置以夹子齿轮上面对齐安装。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机器人手指成品图如上所示
组装教程如下:
组装大手指零件,使用M2X3的螺丝,M2X7的铜柱
组装其他手指零件螺丝使用M2X3,M2X7的铜柱
组装手指跟手心零件,使用M2X5普通螺丝、M2的螺母
套入手指拉线,丝口朝下。
指尖使用M2X4的自攻螺丝
注意最新改进版指尖使用的是M2X4或者M2X5的自攻螺丝,并非图示的M2螺丝+螺母,改进的好处更便于手指的扎带的安装。
最新改进版指尖使用的是M2X4或者M2X5的自攻螺丝
安装手背零件,左右各使用2颗M2X4自攻螺丝,
组装手腕连接片,使用M2X5的自攻螺丝,这个时候舵机必须先处于重置状态下即舵机板发送P1500
上正舵盘,保证舵机在P1500重置状态下安装舵盘并保证舵盘其中一个孔位跟舵机保持正90°
连接手指跟手腕零件,使用M2X5普通螺丝、M2螺母
安装U架跟手指拉线压板,螺丝先不要拧死保证压板跟U架之间一定的空隙
先把手指拉线套入U架跟压板中间然后再把U架卡到舵盘上面
固定U架前后三颗M2X4自攻螺丝,并安装前后舵盘M3固定螺丝。
然后把U架往前推,在手指拉线的推动下保证手指再这个时候是接近伸直的状态下,注意保证大手指扎带比其他4跟手指松一些,即扎带多往前推一些,然后拧死U架上面的M2X5的螺丝
线,此状态就是舵机重置后即舵机板发送P1500的手指状态,大手指在食指之上。