注塑机合模机构设计..
二板注塑机合模机构整体结构有限元分析
结构特点 : 有前模板 、 动模板 , 无后模板 , 锁模力直接作用 配 ,两 模 板 间 距 为 6 0 m 5r a
( 最小 模 厚 ) 将 装配 体 转化 。 为 P r o d格 式 输 出 , aa l si 并
多企业采用 了有限元分析法 ,但大多都是针对单个部件
进 行 分析 , 到 应 变和 应 力计 算 结 果 , 种 分 析 方法 的不 得 这
材料
弹性模量/ P 泊松比 密度/0 g hm Ga 1 ・i
足在于 : 由于各部件之间存在相互作用 , 因此分析结果存 在一定误差 ,不能精确反映复杂的整体结构中各部件的
1 引 言
在模 具 安装 面拉 伸 5 m 的最 小模 具 加 载 面 ; m 为使Байду номын сангаас约 束 接
在 U N G.X2中 进 行 装
1 9 年代初 , 90 欧洲 注塑机厂商 推出了许多新 的全液 近 实 际工 况 , 抱 闸装 置 与拉 杆简 化 为 同一结 构 , 将 压式注塑机 , 其中以二板复合式最具代表性。 其合模机构 于两模板上 。 注塑机属于重载设备 , 合模机构是主要承载
导 入 AN YS Wok e e S r b n h的
机构的重要零件。模板 由前模板 、 动模 板组成 , 具有 固定
模 具 和 运动 导 向的定 位 基 准作 用 ,并且 其 强 度 和 刚度 在
Smuain模 块 以 进行 前 处 i lt o
理及 分 析 。导 入 Wok e c rb n h
注塑机模板集成设计软件开发

HO G Q n N i
( p r n fU b n C ntu t n,Ha g h uR do& T iest Dea t t me o ra o srci o n zo a i V Unvri y,Ha gh u3 0 1 ,C ia) n z o 1 0 2 hn
Abs r t:Ba e n UG ,ANS nd VC ++ ,m o d b a d it g ae sg ot r tac s do YS a ul o r n e rt d de in s fwa e HTFXS1 0 wa d v lp d. Mo l a d . s e eo e u d bo r
维普资讯
第 2 5卷 第 6期
20 0 8年 6 月
机
电
工
程 Leabharlann Vo . 5 I 2 NO 6 .
MECHANI CAL & ELECTRI CAL ENGI NEERI NG MAGAZI NE
Jn 08 u .2 0
注 塑 机 模 板 集成 设 计 软 件 开 发
Ke r s i et n m c iem ud b ad p rm t cm d l A n l i a do t zt n ywo d : n c o a hn o l o r ; aa er o e;C E a a s n pi ai j i i ys mi o
注塑机动定模板有限元分析及其结构优化

例 中模 具 长 宽 的 值 约 为 模 板 导柱 内距 的 2 3 厚 度 为 /, 5 m 全局 接 触 选 择 “ 穿 透 ” 。 m。 无
析 ,所 以在装 配 模型 的处 理 结果 中隐藏 了导 柱和 模具
的 数 据 。 根 据 家 对 球 翠 铸 铁 的 ’ 验 收 标 准 只 对 抗 般 托 强 度 和 延 伸 率 有 所 规 定 , 故 在 应 力 分 析 结 果 中通 常 选择 “ 第 主 要 应 力 ( 1 ” 。 另 外 ,通 过 探 测 主 形 P ) 变线 在z 向 ( 方 与模 具 受 力 方 向相 同 ) 的位 移 量 , 町 以 清 楚 直 观 地 了解 模 板 面 的 变 形 情 况 。动 定 模 板 受 力 及
2 传 统 合模 机 构 模 板 的 受 力 变形 分 析
注 塑机 的合 模 机构 ‘ 股 分 为 曲肘 式和 直压 式 。 曲 一 肘 式合 模机 构 ,足通 过肘 杆及 拉杆 的变 形产 生合 模力 的 。而 直压 式合 模机 构 ,是 由合模 油缸 直接 提供 合模
开裂 为准则 。这 样 的设计 理念 ,往往 是忽 略模 板表 面 变形对 合模 力的影 响 的。而在 实 际生 产 中 ,正 是 由丁 模板表 面 的变形 ,使 合模 力 下 降和 模 具受 力不 均 ,从
S iln uJaa g ( e lsis a hn r .t . oh n 5 8 0 ,Chn Ch n DeP at c i eyCoL d ,F s a 2 3 0 cM ia)
Abs r c : t a t The e or a i f t a e o l m pi ni nd di t i ut o l m pi or e a e pr nc pa d f m ton o he pl t ns f c a ng u t a s r b i n of c a ng f c r i i l e e e t w h c ili lue e m o di g o r lm n i h w l nf nc l n f p oduc . he ba i na y i t e s a e or a i n r dii na t At t ss of a l z ng s r s nd d f m to of t a t o l p a e n t s pa r a ne o e o i pr e pe o m a e o he p a e i e i r l t nsi hi pe , w c nc ptt m ov r r f nc f t l t nsw l b nt odu e l c d.
注塑机解剖图
精品资料
二、直压式锁模锁模系统 (xìtǒng)
(3)锁模开始
(2)半合螺母锁住拉杆
精品资料
(4)锁模完成三、双缸螺杆式注射(zhù Nhomakorabeahè)装 置
旋转螺杆
料斗 射出驱动汽缸
计量马达
止逆环
精品资料
四、计量(jìliàng)
拉返
背压
供应到料斗内的材料在旋转螺杆推动下往前推动(红色箭头)。此时的材料,在 旋转螺纹内进行混合,并被热筒加热板的热量以及旋转螺纹提供的剪切热溶解 (即塑化),从而堆积在旋转螺杆的前端。前端的树脂继续堆积,旋转螺杆因为 受到来自树脂的压力而后移(黄色箭头)。这是计量。此时液压油从射出气缸排 出,可以通过控制排油量控制旋转螺杆后退时的阻力,充分完成材料的混合以及 塑化。这叫做背压。另外,旋转螺杆顶端堆积的树脂存在有残余压力,计量完成 后,又可能从喷嘴的端点发生树脂泄漏。为了避免这种情况,从相反的方向向射 出气缸施加压力,在旋转螺杆部发生旋转的状态下强制退后。这叫回吸。
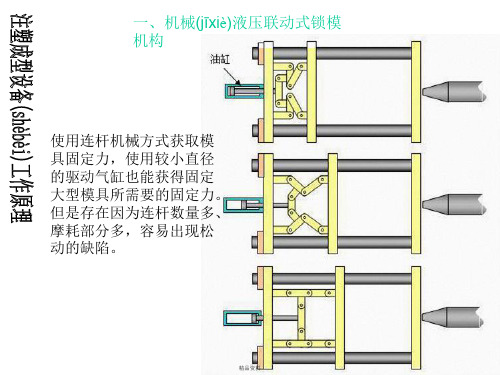
一、机械(jīxiè)液压联动式锁模 机构
使用连杆机械方式获取模 具固定力,使用较小直径 的驱动气缸也能获得固定 大型模具所需要的固定力。 但是存在因为连杆数量多、 摩耗部分多,容易出现松 动的缺陷。
精品资料
二、直压式锁模系统
半合螺母
拉杆
开合模油缸
锁模油缸
(1)合模
动模固定(gùdìng)板
定模固定(gùdìng)板
精品资料
七、成型机各步动作(dòngzuò) 示意图
7〉开模顶出
精品资料
精品资料
五、射出
精品资料
六、止逆环
止逆环
计量(jìliàng)中 射出中
注塑机双曲肘合模机构的优化设计研究
针 对 每个 参 数 化 的设 计 变 量运 行 设 计 研究 分
性 能等 为设计参 数 的选 择 原则 , 排 除相 互 干 涉 的 并 参数 , 确定 以下 的合模 机构 的肘 杆 几何 尺 寸 和位 置
尺寸 为设计 参数 : 、2 、5h O 0 y 。 、 L 、、 、. 、 / 2 2 机构 自锁及 正常运 动的条件 . 合 模机 构要想 实现高 速 、 高效 、 稳定 的启闭模运 动, 必须 满足 如下 的尺寸 约束 及性 质约束 。 () 1 自锁条 件
D D
8 46 6 .2 174 9 .7
连杆与 十字头的铰点 E 连杆 与十字头的铰点 E
前肘 杆 与 前 支 座 的铰 点 C
趴 3
D l 8 _
5 16 3 .6 1Oo 2 .0
5 25 2 .5
4 合模 机构 的设计研 究与优化 分析
4 1 设 计 研 究 .
D 3D 、 8的灵敏度 较 高 , 中 D 2 D 、 D 其 、
呈 负相关性 。对 于行程 比 , 计变量 D 设 、 D 8为优 化变量 。 的
灵 敏度较 高 。因此 综合 选取 D 2 D 3 D 5 DV 、 、 、
一
4. 优 化 分 析 2
A A S中模 型是 依附 于设计点 建立 的 , D M 因此对
的肘 杆机 构 的几何 尺寸 和位置 尺 寸无法 达 到最佳 组
图 1 合 模 机 构 的运 动 简 图
图 1中 、 别 为 大 曲肘 和 大 连 杆 的长 度 , 三分
, 、 J £ 分别 为 小 曲肘 和 小连 杆 的长度 , h为十字 头 的 高 度 , 为 曲肘角 , 为最 大 启模 角 , 斜排 角 , 0为 为 楔角 , 为 顶 角 , 为最 大顶 角 , 。为油 缸 活 塞 S
注塑模具结构及设计-5(导向_定位_顶出_复位)
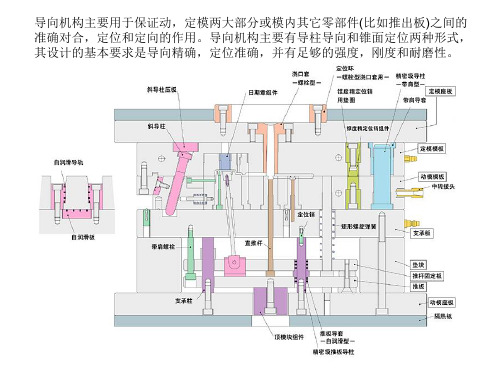
3,导柱的端部通常设计成锥形或半球形,以便导柱顺利进入导向孔。
导柱的端部分别为锥形,半球形,R角,斜角
4,导柱与导向孔通常采用间隙配合,导柱与安装孔通常采用过渡配合。
5,导柱的固定形式 普通导柱的固定形式:
推板导柱的两端都要固定,这样才能 更好的起导向作用。
挂台固定 (通孔)
螺钉固定(盲孔) 导柱配合面研伤更换 时可避免损坏固定孔
定位: 1,在模架上通常增加一些精定位来帮助动, 定模之间更准确的定位。这些精定位的位置 选择要注意关于中心对称,以使受力平衡。 定模 动模
右边为常用的几种 精定位形式(圆锥 面定位型,侧面安 装无锥度型,嵌入 安装锥面定位型)
2,在动,定模芯之间,为了达到更好的定位效果,防止动,定模芯之 间错位,需要增设定位。 动模定位 定模定位
定位到型腔边的距离不 等可能定位效果不理想
4,侧向受力不均匀的 塑件对模具往往有较 大的侧向力,该压力 可能引起型芯和型腔 的偏移,如果传递到 导柱上,将使导柱发 生卡住或损坏的现象, 需要采用定位的形式。
5,有些分型面坡 度过大,合模时受 力不平衡,为了抵 消这些不平衡力, 防止动,定模之间 错位,要设置定位。
动,定模合在一起
定位需带有斜度,合上之后没有间隙
动定模错位导致壁厚不均匀 3,对于成型大型深腔, 高精度或薄壁制品的模具, 型腔可能因为受到大的侧 向压力而向外变形,为消 除动定模之间的断差确保 壁厚均匀需要设置定位。
定 模 涨 开 导 致 动 定 模 之 间 断 差
大型腔或要求壁厚均匀的薄壁塑件的分型面上设置的 定位要随着型腔的外形走
推管顶出后
推管与推管芯的通常固定形式:
3,推块
推块可以有效的增加顶出面积
注塑模和注塑机完整结构全解
若根据注塑模的结构特征可分为以下几类:
1.单分型面注塑模 开模时,动模和定模分开,从而取出塑件, 称单分型面模具,又称双板式模具,其典型结 构如图4-3所示。 单分型面注射模动画及讲解-.swf 单分型面注塑模是注塑模具中最简单最基 本的一种形式,它根据需要可以设计成单型腔 注塑模,也可以设计成多型腔注塑模,是应用 最广泛的一种注塑模。
4 3 2 1 1 2 3 4
具;3-注射装置;4-机身
4.3.1
注塑机的种类及应用
(三)注塑机的规格型号
注塑机的最大注射量:注射柱塞或螺杆作一 次最大注射行程时,注射装置所能达到的最大 注出量。 注出量的表示方法:1.公称重量(g) 3 2.公称容积(cm ) 例如:国产注塑机xs-z-30型、xs-zy-500型、 xs-zy-1000型,表示注塑机可注射聚苯乙烯塑 料的公称容积为30cm3、500cm3和1000cm3 xs-塑料注射成型机,z-柱塞式,zy-螺杆式。
4.3.2
注塑机性能参数校核
开始设计注塑模时,首先需要选择确定模 具的结构、类型和一些最基本的参数和尺寸, 如型腔的个数和需要的注塑量、制品在分型面 上的投影面积、成型时需要用的工艺合模力、 注塑压力、模具的厚度和安装固定尺寸以及开 模行程等等。这些数据均与注塑机的技术规格 密切相关,如果二者之间不能匹配,则模具将 无法使用,此时只能重新选择确定模具的结构 类型或更换注塑机机型。为了了解模具结构类 型与注塑机机型是否匹配,必须将二者之间的 有关数据进行校核。
4.1
注塑模具的典型结构
注塑模的基本结构都是由定模和动模两大 部分组成的。定模部分安装在注塑机的固定板 上,动模部分安装在注塑机的移动板上。 注塑成型时,定模部分和随液压驱动的动 模部分经导柱导向而闭合,塑料熔体从注塑机 喷嘴经模具浇注系统进入型腔;注塑成型冷却 后开模,即定模和动模分开,一般情况下塑件 留在动模上,模具顶出机构将塑件推出模外。 图4-1为一典型注塑模。 根据模具上各部件的作用不同,一般注塑 模可由以下几个部分组成:
全电动注塑机混合驱动式合模机构优化分析
有 注 塑机 合模 系统 的基 础上 ,创 新性 地将 混合 驱动 机 构与全 电动注 塑机 合模 机构 结合 ,研 发 出一种 全 电动 注塑 机混 合驱 动式 合模 机构 ,由大 功率 常规 电机取 代 原有 大功 率伺 服 电机 ,与小 功率 伺 服 电机 共 同驱 动合
由于液 压 驱 动 双 曲肘 斜 排 列 七 支 点 合 模 机 构 具 有 超大行 程 比、锁 模 刚性特 性优 越 、移 模 速度高 且 稳 定 等优 势 ,本文 根据 全 电动 注塑 机 的设 计要 求 ,将
Abta t o ep roeo edn ptevl i f hfn d fa ‘lc i i et nmo ig s c:F rt up s fs e igu h eo t o ii moeo l e tc n ci l n r h p cy s t g l e r j o d
第 4 第 4期 0卷 21 0 2年 4月
塑 料 工 业
CHI NA LAS CS NDUS P TI I TRY
全 电动 注 塑 机 混 合 驱 动 式 合 模 机构 优 化 分析
边旭 东 ,伍 先安 ,谢鹏 程 ,丁 玉梅 ,杨 卫 民
( 京 化 工 大 学 机 电工 程 学 院 ,北 京 10 2 ) 北 0 0 9 摘 要 : 以加 快 合 模 机 构 移 模 速 度 和 优 化 移 模 速度 曲 线 为 目的 ,优 化 设 计 出一 种 新 型 混 合 驱 动 式 合 模 机 构 ,并 对 该
mai sa d d n mis e c e e h x si l—l crc h b i 。 rv n c a i g sr t r . tc n y a c x e d d t e e it ng alee ti y rd d e lmp n tucu e i
毕业设计(论文)-一模多腔的注塑模具结构设计及仿真分析
毕业论文(设计)题目:一模多腔的注塑模具结构设计及仿真分析(英文):The Design of Multi-cavity InjectionMould For Multi-way Buttons andSimulation Analysis院别:机电学院专业:机械设计制造与其自动化(CAD/CAM)姓名:学号:指导教师:日期:2011年5月一模多腔的注塑模具结构设计及仿真分析摘要本次设计主要特点是根据MOLDFLOW软件仿真模流分析来指导模具结构的设计。
MOLDFLOW软件模拟塑料熔体在整个注射过程中的充填、冷却及流动情况,确保获得高质量制件。
打破传统模具结构设计的试模、修模等过程,达到降低成本,提高生产率的目的。
在得到仿真分析最佳质量效果的数据、参数之后用来作为模具结构设计的依据。
本次设计主要包括:(1)模流仿真分析注射成型时熔体在型腔中的流动过程非常复杂,与许多因素如聚合物性能、制件结构、温度、压力、时间、模具结构及注射设备等有关。
仿真定量地给出成型过程的成型窗口状态参数(如压力、温度、速度等)。
(2)依据仿真的成型窗口状态参数进行整个注塑模具的结构设计。
如注射机的选择、浇注系统、成型零件、合模机构、脱模机构和冷却系统的设计,绘制模具零件图和装配图等。
关键词:仿真分析;模具设计;一模六腔;PROE建模The Design of Multi-cavity Injection Mould For Multi-way Buttons and Simulation AnalysisABSTRACTThe main features of the design is based on software simulation flow analysis MOLDFLOW to guide the design of die structure. MOLDFLOW software to simulate the injection of plastic melt in the process of filling, cooling and flow, ensuring access tohigh-quality parts. Breaking traditional mold structure design test mode, the process of repair molds, to reduce costs, improve productivity purposes. Obtained the best quality in the simulation results of the data, parameters after the design used as the basis for the mold.The design includes: (1)Moldflow injection molding simulation of melt flow in the cavity is very complex process with many factors. Such as polymer properties, parts structure, temperature, pressure, time, and injection mold structure and other related equipment. Quantitative simulation of the molding window molding process given the state parameters (such as pressure, temperature, speed, etc.). (2) Simulation based on the parameters of the molding window state the structural design of the injection mold. Such as the choice of injection machine, injection system, molded parts, mold bodies, stripping institutions and cooling system design, drawing die part and assembly drawings, etc..Keywords:Simulation Analysis;Mold Design ;Six-cavity Mold;Proe Modeling目录1绪论 (1)1.1 模具工业在国民经济中的地位 (1)1.2我国模具工业的现状 (1)1.3未来模具发展方向 (1)1.4论文的提出及研究意义 (2)2多向按键工艺分析及模具方案的初步确定 (3)2.1塑件的结构和尺寸精度及表面质量分析 (4)2.2塑件的原材料分析 (4)2.3模具方案的初步确定 (6)2.31 模具结构各个部件的分析确定 (6)2.32 总体结构方案的论证和初步确定 (6)3运用MOLDFLOW进行模具结构有限元仿真分析 (7)3.1介绍其功能 (7)3.2 MOLDFLOW分析的流程 (7)3.3应用MOLDFLOW进行分析 (8)3.31 划分产品网格 (8)3.32 选择成型材料 (9)3.33 确定最佳浇口位置 (10)3.34 创建浇注系统及优化 (11)3.35 创建冷却系统及优化 (13)3.36 成型窗口分析 (16)3.37 选择分析类型 (17)3.38 注射工艺参数的优化 (20)4多向按键的注塑模具结构的最终确定 (24)4.1型腔数目及布局的确定 (24)4.2注塑机的选择 (25)4.3分型面的设计 (27)4.4浇注系统的设计 (29)4.41主流道的设计及计算 (29)4.42定位圈 (30)4.43分流道的设计 (30)4.5浇口的设计 (32)4.51浇口形状的分析与确定 (32)4.52浇口位置的确定 (33)4.6排气系统的设计 (34)4.7模架的确定 (34)4.8推出机构的设计 (34)4.81顶杆的设计及计算 (35)4.82复位杆的设计 (36)4.83推板和推杆固定板的设计 (37)4.9合模导向机构的设计 (37)4.10成型零件的设计 (39)4.101计算成型零件的工作尺寸 (40)4.11冷却系统 (42)4.12模具工作原理 (44)5设计总结 (46)参考文献 (47)致谢 (49)附录 (50)1绪论1.1模具工业在国民经济中的地位模具是制造业的一种基本工艺装备,它的作用是控制和限制材料(固态或液态)的流动,使之形成所需要的形体。
注塑机的合模系统
THANK YOU FOR WATCHING
液压式合模系统是依靠液压力推动柱塞作往复运动来实现启闭和锁模。 (1)优点:动定模开距大,使成型制品的高度范围大;动模板可在行程范围内 任意停留,使模具的厚度、合模速度和合模力的大小调整方便;运动部件有自 润滑作用,磨损小. (2)缺点:系统复杂且易产生液压油的渗漏,使工作油压不稳定增长而导致合 模力的稳定性差;管路、阀件等的维修工作量大;还须设防止超行程安全装置。
03 合模系统的技术参数
模具厚度
模具厚度是指动模板与前模之间装模的最小模具厚度(Hmin)和最大模具 厚度(Hmax),二者之差(Hmax一Hmin)为最大调模厚度(∆S),由调模装置来完成, 是模具选择的重要参数。
(a)
(b)
制品脱模结构示图:(a)闭模;(b)合模 1─ 动模板;2─ 动模;3─ 定模;4─ 前模板;5─ 制品;6─
若选用注射成型机的锁模力不够,在成型时易使制品产生飞边,不能成 型薄壁制品;若锁模力选用过大,容易压坏模具,使制品内应力增大和造成不必 要的浪费。因此,锁模力是保证塑料制品质量的重要条件。
03 合模系统的技术参数
模板尺寸和拉杆间距
模板尺寸和拉杆间距均表示模具安装面积的主要参数。模板尺寸决定注 射成型用模具的长度和宽度,它应能安装上制品质量不超过注塑机注射量的一般 制品的模具,并能用常规方法将模具安装到模板上。
04
合模系统的 技术参数
03 合模系统的技术参数
锁模力
锁模力是指注塑机合模机构施于模具上的最大夹紧力,用于保证模具不 应被熔料所顶开。它在一定程度上反映出注射成型机所能加工制品的大小,常采 用最大锁模力作为注塑机的规格标称。
当熔料以一定速度和压力注入模腔前,需克服流经 喷嘴、流道、浇口等处的阻力,会损失一部分压力。但熔料 熔料 在充模时还具有相当高的压力,此压力称为模腔内的熔料压 力,简称模腔压力,模腔压力在注射时形成的胀模力将会使 模具顶开。为保证制品符合精度要求,合模系统必须有足够 的锁模力来锁紧模具。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目录中文摘要 (I)第一章引言 (1)1.1注塑机整机的工作原理 (1)1.2注塑机的结构组成 (2)第二章合摸机构方案设计 (4)2.1•合模机构的类型和选择 (4)2.2.液压肘杆式合模机构的常见形式和选择 (6)2.3.合模机构的参数和尺寸计算 (7)2.3.1合模力的确定 (7)2.3.2模板尺寸及拉杆间距 (8)2.3.3动模板行程Sm (9)2.4肘杆机构的尺寸参数确定 (10)2.4.1运动特性分析 (11)2.4.2力学特性分析 (12)2.4.3肘杆机构自锁及正常运动条件 (14)2.4.4肘杆机构的速度分析 (14)2.4.5肘杆机构的尺寸参数确定 (18)2.5具体速度和加速度分析 (20)第三章内翻式合摸机构机械结构设计 (25)3.1合摸机构装配图和主要的零件设计图 (25)3.2肘杆机构的强度校核 (25)3.3铰轴的剪切强度校核 (25)3.4注塑机的调模机构 (26)第四章注塑机的液压系统 (27)第五章其它机构 (30)5.1注塑机的机械保险装置 (30)5.2注塑机的注射装置 (30)5.2.1.注塑机的注塑油缸数类型的选择与确定 (30)5.2.2.注塑机的注塑装置的其他部件 (31)参考文献 (32)总结 (33)第一章引言塑料工业是国民经济重要工业部门,又是一个新兴的综合性很强的工业体系,这在很大程度上涉及到塑料加工的设备的先进与否。
所以为塑料制品行业提供加工装备的塑料机械行业,近几年发展迅速,其发展速度与所创主要经济指标在机械工业的194个行业中名列前茅。
塑料机械年制造能力约20万台(套),门类齐全,在世界排名第一。
而在众多塑料加工设备中,塑料成型加工设备是重点,主要有注塑机、挤出机、中空吹塑成型机及其辅助设备。
在成型加工中,注塑占重要位置,其设备是注射成型机,又称注塑机。
注塑成型的特点是:可一次成型外形复杂、尺寸精确、表面光泽的塑料制件;模具可以快速更换,以便制造适应市场需求的产品;特别适宜工程塑料及特种塑料的成型,获得有特殊性能、特殊用途的制品等。
合模机构是注塑机的重要部件之一,因为合模机构提供的锁模力最终决定力模具模腔的平均压力,而模具模腔的平均压力的决定了制品的产品质量。
现在,随着塑料的品种的日益丰富,性能越来越多样性和优越性,以及现在社会对塑料制品的需求量不断上升,且需求品种也越来越多样性。
合模力从超小型的200kN到超大型的大于20000kN,几乎包含了社会生产生活中的各个领域。
但平常用的最多的,较常见的是小型机。
1.1注塑机整机的工作原理注塑机利用塑料的热物理性质,把物料从料斗加入料筒中,料筒外由加热圈加热,使物料熔融;在料筒内装有在外动力马达作用下驱动旋转的螺杆,物料在螺杆的作用下,沿着螺槽向前输送并压实,物料在外加热和螺杆剪切的双重作用下逐渐地塑化,熔融和均化,当螺杆旋转时,物料在螺槽摩擦力及剪切力的作用下,把已熔融的物料推到螺杆的头部,与此同时,螺杆在物料的反作用下后退,使螺杆头部形成储料空间,完成塑化过程;然后,螺杆在注射油缸的活塞推力的作用下,以高速、高压,将储料室内的熔融料通过喷嘴注射到模具的型腔中;型腔中的熔料经过保压、冷却、固化定型后,模具在合模机构的作用下,开启模具,并通过顶出装置把定型好的制品从模具顶出落下。
通俗点来说,注塑机的工作原理与打针用的注射器相似,其借助螺杆的推力,将已塑化好的熔融状态的塑料注射入模腔内,经固化定型后取得制品的工艺过程。
注塑机作业循环流程如图1-1所示。
其中制品冷却与螺杆塑化是同时进行的。
图1-1注塑机工作程序框图1.2注塑机的结构组成注塑成型机主要由合模部件、注射部件、液压系统、控制系统、机身、加热系统、加料装置等组成。
如图1-2所示。
图1-2注塑机组成示意图由图1-2可大致地看到注塑机是一个机电一体化程度很高的设备,其中合模性能对提高制品质量、提高生产效率有重要影响。
本文主要从合模部件、注射部件、液压系统和控制系统这四个方面展开具体的结构分析和有关参数确定。
1.3合模装置配套的注塑机机型随着塑料的性能和可塑性的提高,以及近年来,随着医疗器械以及电子产品消费的不断增长,产品的更新换代越来越快,塑料制品的生命周期因此也变得越来越短,导致小型注塑成型制品的需求逐年增加,因而生产这些制品的小型注射成型机也引起了人们的广泛关注。
基于这一点,本注塑机主要用于生产食品包装、电子产品包装、商用机器壳体以及医疗器械等制品。
根据上述制品相关性能的要求,比如电子产品包装和医疗器械都应该具备优良的各项性能。
故选择PVC (聚氯乙烯,白色粉末,其力学性能、化学性能、电性能、阻燃性优良,密度1.38^ cm')作为制品注塑用料。
根据聚氯乙烯的成型性能确定其注塑工艺条件,如表1-1所示。
表1-1根据用途和制品塑料品种,该注塑机注塑多类形状的制品,要求能方便地更换模具,且制品尺寸较小(最大180mM 180mr)质量较轻,属于日常用品,小型机便能达到要求,故选择卧式螺杆式注塑机。
其特点是注射总成的中心线与合模总成的中心线同心或一致,并平行于安装地面。
它的优点是重心低、工作平稳、模具安装、操作及维修均较方便,模具开档大,占用空间高度小。
第二章合摸机构的方案设计2.1合模机构的类型和选择合模机构是注塑机的重要部件之一, 其功能是实现启闭运动,使模具闭合产生系 统弹性变形达到锁模力,将模具锁紧。
对于一个比较好的合模机构应该具备三个方面 的特性: 1) 足够的锁模力和系统刚性,保证模具在熔料压力作用下,不会产生开缝溢料现象; 2) 模板要有足够的模具安装空间及模具开启行程;3) 快速的移模速度及较慢的合紧模具速度,移模时要具备慢 -快-慢的运动特性。
现按锁模力的实现方式讨论全液压式、液压肘杆式和电动式合模机构的优缺点。
(1)全液压式点是启闭模动作和合模力的产生都由合模油缸直接完成, 构。
合模机构的合模动作由液压油作用在活塞上来实现, 成。
这种合模机构不满足合模机构的运动特性, 耗能大,精度低,目前已经很少应用2)增压式合模机构。
由合模油缸、充液阀、稳压油缸和增压缸组成。
此类合模机构 的锁模力受液压系统和密封的限制,固增压有限,主要用于中小型注塑机。
3)充液 式合模机构。
这种开合方式模精度高、模板受力均衡、不需调模、不需加油润滑、磨 损较少、开合模行程长;但容易内泄造成升压时间长、爬行、甚至让模、速度慢、漏 油、能耗高、容易造成液压冲压、液压系统复杂、成本高、大油缸加工困难。
(2)液压肘杆式液压肘杆式合模机构由移模液压缸和曲肘连杆两部分串联而成, 是通过液压系统 驱动曲肘连杆机构来实现模具的启闭和锁紧。
它可以用很小的液压缸推力,通过肘杆 机构的力的放大作用来获得较大的锁模力。
在开合模过程中,这种机构能实现慢 -快- 慢的运动过程,提高了合模速度,节约了能耗并提高了效率。
在输入功率相同的情况 下,肘杆式合模机构的运动速度优于其它形式的合模机构,如在相同的尺寸和运动速 度下,肘杆式合模的输入功率比全液压式约节省 10%-20%。
另外,肘杆式合模机构 的开模力通常是有限的,这一点在小吨位机器上更为明显。
液压肘杆式是目前使用最 为普遍的合模机构。
但这种方式不足的是:1)结构复杂、易磨损、开合模精度差;全液压式合模机构可分为直动式、增压式和充液式 1)直动式合模机构。
其特 这是一种非常简单的合模机 锁模动作由液压油升压来完2)加工精度要求极高,在成型过程中使得模板受力不均,不能成型精密产品;需要复杂的调模结构和润滑系统,开合模行程短,而且销轴等磨损后造成的受力不均,会加速机器损坏,例如:销轴和拉杆断裂、模板开裂、调模螺母咬死等。
(3)电动式电动式合模机构指用电机作动力源来驱动模版移动而实现合模、锁模的合模机构。
目前,较流行的是全电动肘杆式即所谓电动机械式合模机构。
全电动肘杆式合模机构使用伺服电机配以滚珠丝杠、齿形带等元件替代液压系统驱动曲肘连杆机构来实现模具的启闭和锁紧,整个装置的调模、顶出均采用伺服电机来执行的合模机构。
具有节能、控制精度和重复精度高、效率高和环保清洁等优点。
但不足的是滚珠丝杠会带来新的问题:1)滚珠丝杠的磨损会导致精度下降;2)对制造、装配的要求较高,若两者的精度不够,则会在滚珠丝杠上出现附加的径向力,从而加速滚珠丝杠的磨损;3)当成型面积较大时,如果在肘杆未完全撑直时就开始注射,滚珠丝杠要承受很大的轴向力,加速滚珠丝杠损坏;4)成本太高,特别是电气控制系统,在目前注塑机技术条件下,市场普及度较低。
表1-2为全液压式和肘杆式(液压肘杆式和全电动肘杆式)合模机构的性能对比。
综述以上三种类型合模装置的对比分析,本设计选择液压肘杆式合模装置。
表1-22.2液压肘杆式合模机构的常见形式和选择下面主要以双曲肘五支铰连杆合模机构展开论述计算,其主要结构为内翻式和外翻式两种。
(1)双曲肘内翻式五支铰连杆机构,如图2-1所示。
图2-1双曲肘内翻式1—合模油缸;2—调模装置;3—后模板;4—连杆机构;5—动模板;6—拉杆;7—前模板动作原理:启闭模时,合模油缸1进油,推动双曲肘连杆机构4带动动模板5及其模具实现启闭模运动;模具接触时,曲肘连杆处于未伸直状态,在合模油缸1推力作用下曲肘连杆机构产生力的放大作用,使合模系统发生变形,直至曲肘连杆伸直进入自锁为止。
模具接触时连杆未伸直的程度是通过调模装置2与合模油缸相配合,按工艺所要求的锁模力来调整的其特点是,启模时,双曲肘相对于轴线向内翻转,结构较外翻式简单、紧凑,较适用于中小型机,是比较有代表性的,是目前应用最为普遍的合模机构。
图2-2双曲肘外翻式1 —合模油缸;2—曲肘连杆机构动作原理:启闭运动原理和锁模原理与外翻式相同,所不同的是结构特点,在后模板和前模板上的支铰靠近中心布置,启模时双曲肘相对于轴线向外翻转,减小了支铰跨度,增加了动模板的支承刚性,减小了挠度,较适用于大型机。
综上所述,比较双曲肘内、外翻式的特点,结合本注塑机为小型机,所以选择双曲肘内翻式合模机构。
2.3合模机构的参数和尺寸计算2.3.1合模力的确定合模力也称锁模力,其含义为合模机构锁模后,熔料注入模腔时,模板对模具形成的最终锁紧力。
.液压肘杆式合模机构的合模力是通过合模油缸产生的推力借助曲肘连杆机构的传递和放大,作用在动模板上,然后使模具产生合模的力。
具体原理是,当模具刚接触时(还未产生明显的弹性变形),由于曲肘连杆尚未完全伸直,即在图-3中L1与水平线的夹角(合模角〉)接近3°时,产生曲肘锁模角及连杆角,开始进入锁模状态。
此时继续油缸施加推力,那么整个合模机构就要发生弹性变形,产生变形力。
最大变形力是曲肘连杆机构在伸直后进入自锁状态下发生的,此时进入锁模状态的锁模力等于变形力。