陀螺最小二乘法温度补偿
利用最小二乘法选取最优的段式温度补偿系数

鲤碗 = 扪∑渊 0 + 舭∑渊 O + 2 们∑H 魄 + k 0 一 % 、, +
毛魄一毛)一咒)·@一茗。)=0
脚1
M2
塑如
=∑0+2·
‘=l
∑(y0+k·(屹一知)+
‘=1
=
+
=0
a—a G—k
如(簟一赶)一yi)·(氖一恐)+ 们∑m O = O
盟如盟峨 II 兆一如G—兆k仉一一以h
兆一砜仍兆一k一鱼矾白
1.1,I=I l
L
a32 a33 J Lk^J
其中。
口a213·[茎k]=『.b62a31
肌∑㈨ d l = ,-I、
2
,k % 一 % 、, +
2
/~ 吃 一 % 、, +
Ⅳ3
Ⅳ
i∑=l(矿粕)2)‘ko+(荟 (茗‘一茗1)(膏1一XO))
口2=
菇 一毛
瓢 一砌
脚2
a31=∑(勉一粕)·(毛一屯) ‘=1
Y2 2Yo+ko(戈2一龙o) P1(龙i)5Yo+ko·(菇‘--Xo)
鸶=簧+薏+簧=。
P2(茗i)=Y2+k2·(菇‘一菇2)
故
P3(菇i)。Y1+k1·(茗‘--X1) 则误差为
鬻=2·霎‰+k(毛一%)一九)瓴一%)+
胁
Q,=∑(yo+‰·(毛一Xo)一Y1)2 l2J /,I'2
Q2=∑(Y2+k2·(茹;一X2)一Yi)2
D=
∑名;
i=1
∑鼍 m
i:l
D1=
∑xiY;
i=l
∑Y;
i=l
,巩=
∑髫;
I=1
∑xiYf
‘=1
∑Yt
i=1
最小二乘法
规避条件数的计算问题,得到容易计算的误差估计式,是解决最小二乘问题误差估计的研究重点,也是近期研究的新方向。
误差估计分为两类:一类是向前误差估计,另一类是向后误差估计。
向前误差估计:估计每一步的误差,看累积和传播的情形。
向后估计误差:先把结算结果归结为原始问题经某种扰动后的精确解,然后用扰动理论估计这种扰动对解的影响。
向后误差估计结果至少有3方面的应用:其一:测试新数值方法的稳定性。
其二:与条件数理论相结合,给出计算解的精度估计。
其三:为迭代法设置合理的停机准则。
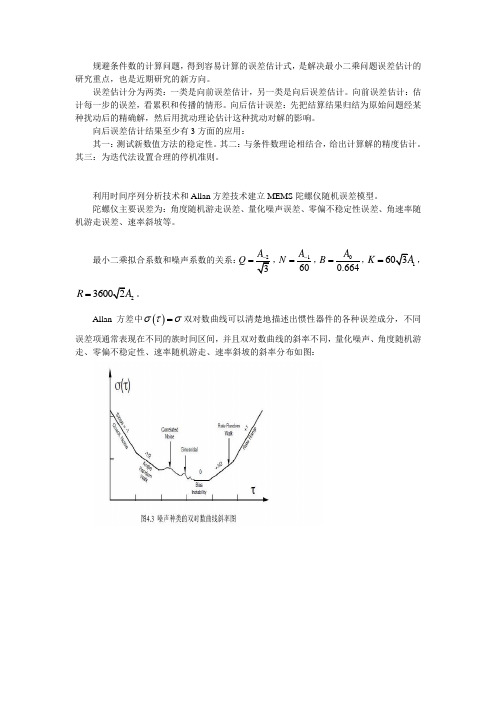
利用时间序列分析技术和Allan 方差技术建立MEMS 陀螺仪随机误差模型。
陀螺仪主要误差为:角度随机游走误差、量化噪声误差、零偏不稳定性误差、角速率随机游走误差、速率斜坡等。
最小二乘拟合系数和噪声系数的关系:Q =,160A N -=,00.664A B =,1K =,2R =。
Allan 方差中()στσ=双对数曲线可以清楚地描述出惯性器件的各种误差成分,不同误差项通常表现在不同的族时间区间,并且双对数曲线的斜率不同,量化噪声、角度随机游走、零偏不稳定性、速率随机游走、速率斜坡的斜率分布如图:图5.7Anan 方差辨识软件流程图一般保持采样数据长度/采样周期在3个数量级以上。
3轴MEMS 陀螺仪Allan 标准差双对数曲线积分时间τ单位为s ,Allan 标准差()στ的单位为h ,将τ单位化为h 之后,利用()11lg lg lg 3lg 22r k r K σττ=-+及()()()()22211122N n k k k T T T N n σ-+=⎡⎤=Ω-Ω⎣⎦-∑可求解出各个陀螺的噪声项系数N K B R Q 、、、、,绘制出Allan 方差最小二乘拟合曲线。
需要说明的是,上诉所有的误差项并非在各种环境下都能同时存在。
某项误差是否存在须根据Anan 均方差双对数曲线实际分析得出,同时也与样本长度N 有关,有的误差项需要大量的采样数据才能发现。
基于LS—SVM的开环光纤陀螺误差补偿方法
20 0 8年 9月
数
Vo1 23 No. . S S p. 2 08 e 0
J u n l fDaaAc ust n& P o esn o r a t q iio o i r c sig
文 章 编 号 :0 4 9 3 ( 0 8 增 刊一 l 8 O 1 0— 07 2 0 ) O 5一5
Er o m pe s to e ho s d o — VM o e — o r r Co n a i n M t d Ba e n LS- S f r Op n- Lo p FOG
Z o a x n ,YuZh n Zh n n h n h uZh n i @o g , a g Ya s u
( . c o lo e to isa d I fr t nEn ie rn 1 S h o f cr nc n n oma i gn e ig,To gi ie st El o n j Unv ri y,S a g a ,2 0 9 ,Chn ; hnhi 002 ia
2 Th n Hi h Te h iu n t u e . e Xia g — c n q e I s i t ,Xia ,7 0 2 ,Ch n ) t n 10 5 ia
t s a e t s mpls e .Th e u t ho t t t xi um i e rt r o e —o e r s ls s w ha he ma m ln a iy e r rofop n l op FOG s r d c d i e u e
fo 1 t % ,a d t es g n e o e s to t o e sb ea dv l .Th r cso r m 5 o Z 0 n h e me tdc mp n ain meh di fa i l n ai s d ep e iin
陀螺仪标定方案

陀螺仪标定一、陀螺仪模型二、标定原理分别标定陀螺仪XYZ三轴的误差。
标定一个轴时,使转台绕待标定的轴以一定角速率旋转,其余两轴不动,改变角速率的值,得到10组不同角速率下陀螺仪的三轴输出值。
将陀螺仪输出值和转台输入值代入陀螺仪模型中,用最小二乘法求解误差系数矩阵。
三、标定过程将惯性器件安装在三轴转台内环框架上,使陀螺X、Y、Z轴分别与三轴转台的内框、中框、外框同轴。
X轴标定:1、设置转台运动方式为速率方式,先将转台归0,接通电源,预热10min。
2、转台内框转动轴按照表格中第一个速率正转,待转速稳定后同时采集陀螺仪3个敏感轴角速率输出值,取采样频率为100Hz,每种速率模式采样1min。
采集完成后转台停转。
然后转台反转,再采集陀螺仪输出值,采集完成后停转。
10种速率全部采集完后,将转台归0。
Y轴标定:转台中框转动轴按照表格中第一个速率正转,待转速稳定后同时采集陀螺仪3个敏感轴角速率输出值,取采样频率为100Hz,每种速率模式采样1min。
采集完成后转台停转。
然后转台反转,再采集陀螺仪输出值,采集完成后停转。
10种速率全部采集完后,将转台归0。
表2. Y轴标定时3个敏感轴输出Z轴标定:转台外框转动轴按照表格中第一个速率正转,待转速稳定后同时采集陀螺仪3个敏感轴角速率输出值,取采样频率为100Hz,每种速率模式采样1min。
采集完成后转台停转。
然后转台反转,再采集陀螺仪输出值,采集完成后停转。
10种速率全部采集完后,将转台归0。
表3. Z轴标定时3个敏感轴输出四、数据处理忽略转台的起始和停止阶段,求得在某输入角速率下陀螺仪输出的平均值作为该输入角速率下的陀螺输出值填入表1、2、3中。
以X轴为例,将表1中10种模式下的转台输入值和陀螺仪输出值带入数学模型式(1)中,分别得到关于K xx,K xy,K xz,W x0的10个方程,写成矩阵形式如下[W x1 W x2⋮W x10]=[p1q1r11p2q2r21⋮⋮⋮⋮p10q10 r101]·[k xxk xyk xzw x0]其中W x为陀螺仪X轴10种速率模式下的输出值,p、q、r 为转台输入值。
基于最小二乘法的电化学传感器温漂补偿研究

基于最小二乘法的电化学传感器温漂补偿研究王昭文,姚毅,唐碧莹,伍秋谱(四川轻化工大学自动化与信息工程学院,四川自贡643000)摘要:现有的电化学氢气传感器其温度特性不太理想,传感器输出的灵敏度与零点值随温度的变化发生漂移,测量精度不高,误差较大,因此需对其进行温度漂移补偿[1_4]o基于最小二乘法改进了一种多项式曲线拟合方法,通过一定的条件约束和工程估算,得到一种温度漂移补偿算法[5]%利用该算法对不同温度下的实测数据进行处理,极大改善了环境温度变化对系统输出的影响,通过理论数据和实测数据验证了算法的有效性和可行性,并用于工程实践。
关键词:最小二乘法;温度漂移;曲线拟合补偿算法中图分类号:TP212.2文献标识码:A文章编号#1000-0682(2021)02-0069-05Research on temperature drift compensation of electrochemical sensor based onleast sqrarr mettodWANG Zhaowen,YAO Yi,TANG BiyPg,WU Qiupu(School of Automation and Information Engir^ering,Sichuan University of Science and Engi*e ring,Sichuan Zigong643000,China) Abstract:The temperature chaccWCstics of the existing electrochemical hydroaen sensor are not ideal.The sensitivity and zero vvluv of the sensor output dCP witI temperature changes.The mexsurv-ment accuracy is poor and the ewor is/i/v.Therefore,temperature dcft compensation is required-A polynomial curve fitting method is ipproved based on/at square meWod,and a temperature dcft compensation Igorithm is obtained tIrough ceCain conditional constraints and engineecng wtinilw.The algorithm is used to process the mexsured data at diPwent temperatures,which greatly improves the influence of environmental temperature changes on the output of the system.The eWectivenws and feasibility of the Igorithm is vecfied by theoretical data and mexsured data,and it is used in engineecng practice-Keywords:/xst squares method;temperature dcft;curve fitting;compensation algorithm0引言电化学传感器通过内部的电解质与目标气体发生反应并产生与气体浓度成正比的电信号来工作。
二频机抖激光陀螺温度漂移补偿的初步研究
二频机抖激光陀螺温度漂移补偿的初步研究张鹏飞,龙兴武(国防科技大学光电科学与工程学院,长沙4l0073)提要:从实验上研究了二频机抖陀螺的零偏和温度的关系。
通过重复性温度实验,利用最小二乘法得到了拟合曲线表达式。
结果表明,二频机抖陀螺的零偏和温度具有较好的线性关系和重复性,可以通过温度补偿来提高陀螺的精度。
关键词:机抖偏频激光陀螺;零偏;最小二乘法;温度补偿中图分类号:TH744.5文献标识码:A文章编号:0253-2743(2005)05-0083-02Primary research on temperature compensation of mechanically dithered RLG’s biasZHANG Peng-fei,LONG Xing-wu(CoIIege of OptoeIectronics Sci.&Eng.,NationaI University of Defense TechnoIogy,Changsha4l0073,China)Abstract:Based on temperature experiment,the reIation of mechanicaIIy dithered RLG’s bias to temperature has been studied.The Iinearized expression has been achieved in the heIp of the method of Ieast sguare by temperature experiment repeated.It has been shown that there have been the better Iinear reIation and repeatabiIity.The RLG’s precision can be improved by temperature compensation between bias and temperature.Key words:mechanicaIIy dithered RLG,bias,the method of Ieast sguare,temperature compensation.l引言〔l,2〕二频机抖激光陀螺作为惯性导航的理想器件,具有启动时间短、动态范围大、可靠性高、寿命长、数字式输出等特点。
减小光纤陀螺零偏的温度补偿研究

2Istt o po l t n n i e n .ntu O t —Ee r iE gn r g,C a gh nU i r0 o i c ad Tcnl y h ncu 10 2 ) i ef co c ei h ncu nv s S e e n ehoo ,C a ghn 0 2 ei f c n g 3
光纤 陀螺 是 一 种 基 于 光 学 Sg a an c效应 的惯 性
境 温度 的变化 是影 响零位 漂移 的重要 因素之一 ,温 度 对光纤 陀螺 性能 的影 响主要 是噪声 和漂移 ,噪声 决定 光纤 陀螺 的零偏 稳定性 ,可 以通 过滤波 方法处 理 ;漂移 决定 陀螺输 出信 号 的偏 移量 ,可 以通 过建 立 各种 漂移数 学模 型来进 行补 偿 。此 外 ,光 纤陀螺 的标度 因数也 具 有 温度 依 赖 性 ,随 着 温度 的变化 , 标 度 因数非线 性 度 加剧 。 最后 也 导 致检 测 的误 差 。
VO『 0 N0 1 . 3 .
M a .2 0 0 7 r
减 小 光 纤 陀螺 零 偏 的 温 度 补 偿 研 究
于明飞 ,陈孝君 ,冯进 良 ,韦宏强 ,孙安信
(.31 部队 ,长春 1 33 9
摘
10l ; . 3 11 2 长春理工大学
光电工程学 院 , 长春
测量 仪表 ,它利 用 固态 的全光纤结 构实 现载体 自转
角速 度的 测量 。对于工 程化 要求 的光纤 陀螺 ,为适 应各 个领域 的应 用 ,一 般要 求光纤 陀螺具 有较 宽 的
工作 温度范 围 ,可 以在不 同温 度 环境 下 正 常工 作 。
但是 由于构 成光 纤陀螺 的主要器件 如光 纤线 圈 、集 成光 学器件 、光 源 、耦 合 器等对温 度较 为敏感 ,所 以当工 作环境 温 度发生 变化 第 3 第 1期 0卷
神经网络在光纤陀螺标度因数温补中的应用
wo k c mp n a in me h d wa r u h o wa d t h s is e r o e s t t o s b o g tf r r o t i s u .Th o g h n l ss a d c mp r o e we n t e e o r u h t e a ay i n o ai nb t e h s s m eh d ,t e smu a i n r s ls i d c td t a h ro e u e r a l y u i g BP n u a e wo k me h d wh c t o s h i lt e u t n ia e h tt e e r r r d c d g e t b sn e r ln t r t o 标 度 因数 温 补 中的应 用
陈永 奇 , 春 熹 , 奎 宝 张 朱
( 京 航 空航 天 大学 仪 器 科 学 与 光 电 工 程 学 院 ,北 京 1 08 ) 北 0 0 3
摘
要 : 述 了光 纤 陀 螺 标 度 因数 受 温 度 影 响 的机 理 , 纤 长 度 、 纤 环 直 径 、 阐 光 光 中心 波 长 、 成 光 学 调 制 器 调 制 集
c fiinto ntgr e oe fce fi e atd optc lm o l o nd 2 e e la . T h e p r u em o lc m pe s ton w a e e r he ia duat ra n r s tvo tge e t m e at r de o n a i sr s a c d d e y. The tad to ll a tt - u tpl e ho d s m e dia a a ol ng t s pr l m . BP ur lne — e pl r iina e s~ wo m li y m t d ha o s dv nt ge on s vi hi ob e ne a t
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于MEMS姿态传感器温度补偿方法传感器的温度补偿方法大致可以分为两种,即硬件补偿和软件补偿。
硬件补偿方法主要是改变电路来达到补偿效果,但是这种方法会导致电路的复杂化,同时提高了成本。
软件补偿方法主要有最小二乘法、BP 神经网络法、回归法等。
从计算的方便性和补偿精度的准确性两个方面,本文采取最小二乘法进行温度补偿。
1 姿态传感器的温度补偿原理
本文采用美国InvenSense 公司生产的ITG3205三轴陀螺仪芯片,该芯片中内嵌有数字输出温度传感器,因此可以随时检测出传感器所处的环境温度。
在不同的工作环境温度下,传感器实际角度输出值与理论角度输出值会出现一定的误差,称之为温度误差。
为了消除或者减少这种温度误差,利用最小二乘法进行曲线拟合,最终达到或接近理论角度输出值。
传感器根据输入的检测信号,通过姿态检测模块和温度检测模块采集相关数据,然后经过温度补偿模块进行相应的温度补偿,最后通过输出检测模块可得到预期的检测信号。
姿态传感器的温度补偿原理如框图1所示。
2 姿态传感器的温度补偿方法
在同一温度下,不同角度的理论值与输出值之间严格意义上是一种非线性关系,但是由于这种误差值相对不大,可以近似的认为是一种线性关系,即y = mx + n 的线性关系。
通过最小二乘法进行线性拟合,可以得出参数m 和n 的值。
此时可以发现,在不同的温度下,所拟合出来的m和n 值是随温度的变化而变化的。
在此情况下,必须找出温度分别与m 和n 之间的关系,为此同样可以根据最小二乘法再次进行曲线拟合,从而得出m 值与温度之间的关系。
同理也可以得出n 与温度之间的关系。
经过两次曲线拟合之后,可以得出理论值与输出值之间的误差有了明显的减小,并且满足预期的要求。
在实际应用中,为了达到高精度检测的要求,可以通过测量多组数据进行曲线拟合的方法来实现。
3 姿态传感器的实验数据处理
由于各轴的检测原理是相同的,因此本论文采用x轴的检测数据进行实验验证。
主要的实验仪器有被测姿态传感器、经纬仪、高低恒温箱、高精度角度检测仪等。
表1所得数据是未经温度补偿时的实验数据,即原始数据。
3.1 第一次线性拟合
由于按照最小二乘法的基本步骤进行拟合的计算量比较大,所以本文采用Matlab进行数据处理,这样不但可以减少复杂的计算过程,而且还可以保证较高的计算精度。
例如在温度T=-30 °C的条件下,以理论角度x 为自变量,输出角度y 为因变量,根据线性关系式y = mx + n ,计算出参数m 和n的值。
具体计算程序如下:
拟合图像如下图2所示。
依次求出不同温度下参数m 和n 的值,计算结果如表2所示。
3.2 第二次曲线拟合
以参数m 为因变量,温度t 为自变量,根据曲线拟合式mt = at2 + bt + c ,利用Matlab 求出a,b,c 的值,最终确定m 与t 的函数关系式。
同理,可求得n 与t 的函数关系式。
具体计算程序如下:
拟合图像如图3所示。
同理,求得n 与t 之间的函数关系式为:
4 实验数据的验证
传感器未经温度补偿时的输出为y = mx + n ,即在t ℃时,无补偿输出为:
根据式(1)、(2)、(7)可得补偿后的输出值。
偿后的数据如表3所示。
在表1中未补偿前的最大误差角度为0.682 7°,表3中补偿后的最大误差角度为0.261 6°,相对减少的误差角度为0.421 1°。
由表1和表3的数据对比结果可以看出,经过温度补偿后的姿态检测精度相比补偿前有了很大的提高。
5 结语
由数据对比得出,在环境温度变化的条件下,利用最小二乘法进行温度补偿,可以达到预期的效果,因此这种方法可以运用到工程实际中。