非线性补偿
如何用单片机实现对传感器信号的非线性补偿

aa317wk272010-03-17 13:44:03(一)设计思路1.测量方法:多周期同步测量法( 倒数计数器法)从根本上消除了±1误差,实现了等精度测量2.实现技术的选择:硬件实现法(可选的器件有通用的SSI/MSI/LSI集成电路、专用集成电路、可编程逻辑器件——如isPLD器件等);软件实现法(可选的平台有PC机、单片机、DSP器件等)将这两种结合来实现设计要求。
3.信号发生器的选择(频率范围900—1300.0(KHz))SG-4162AD高频信号发生器/计频器:频率范围:100KHZ-150MHZ◆分6档三次谐波到4 50MHZ±5%◆输出电压:100MVRMS◆低频输出:1KHZ2VRMS3.大概的系统设计原理框图:(二)子系统设计1.输入通道的设计。
输入通道是由前置放大器和整形器组成的,所以要对前置放大器的增益和带宽指标进行估计。
为了能准确测量信号,将输入信号经过一个放大整形电路。
其具体实施方案为:将输入信号经过LM358运放放大,再通过74LS132整形,此时的信号还不能直接送入单片机,这是因为在硬件上CPU对INT0和INT1引脚的信号不能控制,解决这个问题要通过硬件,再配合软件来解决。
2.预置闸门时间发生电路设计。
闸门时间的确定,可以先由一个555定时器产生一个脉冲信号,将555产生的脉冲信号送入到74LS90十进制计数器当中,由于74LS90具有二-五进制混合计数的功能,所以可以用它来实现五进制计数,将74LS90的输出接到3—8线译码器74LS138的输入端,再将译码器的输出端接上五个发光二极管,这样就可以实现硬件上的闸门时间控制。
但是考虑到硬件实现上的复杂性,可以通过软件上来实现,就是将五个发光二极管直接接到单片机的P1口由软件上来实现,通过按键来改变它的闸门时间。
3.数码显示电路的设计。
该部分电路是由单向八位移位寄存器74LS164和数码管组成的。
光纤通信系统中非线性损伤补偿技术的研究
光纤通信系统中非线性损伤补偿技术的研究徐梦然;崔晟;李俊【摘要】Along with the increase of transmission capacity and distance driven by broadband applications,the Non-Linear Dis-tortion (NLD)of signals in fiber-optic transmissions has become one of the major limiting factors to fiber-optic communication systems.This paper summarizes the latest developments of Non-Linear Compensation (NLC)technologies in the optical and e-lectrical domains,analyzes and compares their mechanisms,characteristics and practical applications with the focus on Digital Signal Processing (DSP)-based NLC for digital coherent optical communication systems and the trend of their future develop-ment.%随着传输容量和传输距离的增加,光纤传输中信号的 NLD(非线性损伤)已经成为限制光纤通信系统性能的主要因素之一。
文章系统地总结了光域和电域 NLC(非线性补偿)技术的最新发展动态,对各种 NLC 技术的机制、特点及其实用性进行了分析比较,并重点介绍了数字相干光通信系统中基于DSP(数字信号处理)的 NLC技术,探讨了其未来的发展方向。
传感器的线性化及温度补偿

x(非电量) 传感器
y(电量) 放大调 理电路
Ay(模拟量)
A/D
Dy(数字量) A/D
1 计算法 采用热敏电阻测温,传感器输入输出关系为
RT
R0
exp(
B T
B) T0
Байду номын сангаас
T B( B ln RT )1 B( B ln Uo )1
T0
R0
T0
KR0
Dx(数字量)
2 查表法
12.2.2 数字线性化
传感器的线性化
任课老师:赵 国 伟
12.1传感器特性线性化原因 为什么要进行传感器特性的非线性特性线性化?
变极距型电容传感器转换关系
C
σ
ε
ΔC
C0
Δσ
C s 0r s
σ
σ
12.2 传感器非线性特性的线性化
12.2.1 模拟线化 1. 开环式非线性补偿 (1)解析方法
x
传感器
u1
放大器
uo
-
uf
非线性反馈
u1 f1(x)
uo ku
uo Sx
u u1 u f
uf
u1 u
f1
(
uo S
)
uo k
(2) 图解法
x
传感器 u1+ Δu 放大器
uo
-
uf
非线性反馈
u1 f1(x)
uo ku
uo Sx
u u1 u f
uf
u1 u
f1(
uo S
)
uo k
3 非线性补偿的具体方法
u2 非线性补偿 uo
则,
u1 f1( x)
u2 a ku1
光电传感器电路设计中的非线性补偿方法

光电传感器电路设计中的非线性补偿方法引言:随着科技的发展,光电传感器在各种应用领域都得到了广泛的应用。
在光电传感器的电路设计中,非线性补偿是非常重要的一环。
由于光电传感器在不同工作条件下,输出信号的电压-光强度特性曲线可能会发生非线性畸变,而这可能会对传感器的性能和测量结果产生重大影响。
因此,采取适当的非线性补偿方法来修正这些非线性特性是至关重要的。
一、什么是光电传感器的非线性补偿当光电传感器在工作过程中,输出信号的电压-光强度特性曲线并非总是呈线性关系,而是会受到多种因素的影响而产生非线性的畸变。
这些因素可能包括电源波动、温度变化、器件参数变化以及电路中其他干扰源的存在。
非线性补偿的目的是通过采取一系列的补偿方法,使得输出信号的非线性变换能够得到有效的控制和修正。
二、非线性补偿方法的分类1. 数学模型法数学模型法是一种基于数学原理的非线性补偿方法。
通过对光电传感器输出信号的特性进行建模,可以根据建立的数学模型对非线性特性进行精确补偿。
常见的数学模型包括多项式模型、指数模型和对数模型等,其中多项式模型是最常用的一种。
采用数学模型法的优点是其理论基础较为牢固,准确性较高,能够适应不同的传感器和非线性特性。
然而,数学模型法需要进行比较复杂的计算和模型参数的优化,对硬件资源和计算能力有一定要求。
2. 数据修正法数据修正法是基于实验数据的非线性补偿方法。
通过预先获取光电传感器在不同光强度条件下的输出信号数据,可以对实验数据进行合理的加工和修正,从而得到补偿后的数据。
常见的数据修正方法包括插值法、拟合法和曲线拟合法等。
数据修正法的优点是简单易行,不需要太多的理论分析和计算,适用于一些对准确性要求相对较低的应用场景。
然而,数据修正法可能受到实验数据收集误差的影响,需要进行较多的实验和数据处理,提供的补偿结果可能存在一定的误差。
3. 模拟电路设计法模拟电路设计法是通过电路设计来实现非线性补偿的方法。
典型的非线性补偿电路包括自校正电路和非线性反馈电路。
机电系统低速非线性补偿仿真研究

第2 3卷 增 刊 20 02年 8 月
长
春工业大源自学学报 Vo . 3 S p 12 u pl
J UR L OF C NGC O NA HA HUN UN V S T E HNOL Y I ER I Y OF T C OG
摘
要: 针对 机电 系统低速运 行时存在 的以摩擦力 矩为 主 的非 线性 干扰 , 立 了摩 擦力 矩 的数 学模 型 , 建 根据
该 模型提 出了 自适应 控制律 , 进行 了仿 真研究 。 关键词 :低速非线 性 ; 擦力矩 ;自适应 摩
中 图 分 类 号 : 1 7 . I: 14 ' 2 文 献 标 识 码 :A
一 一
主要 有 基 于 高 增 益 的 P D控 制 器 补偿 , 代 学 习 迭 补偿 , 冲补偿 等 。 由于摩 擦 非线 性 存 在 , 引起 脉 会 机 电系统 较 大 的跟 踪 误 差 , 造 成 转 台 低 速 抖 动 并 或爬 行 , 机 电系 统 的伺 服 精 度 、 速平 稳性 受 到 使 低 影 响 , 此 , 实 用 角 度 出 发 , 必 要 对 伺 服 系统 因 从 有 的低 速 干扰 力 矩 , 行有 针 对性 的补 偿 方法 研 究 。 进
Au . 0 2 g2 0
文 章 编 号 :10 —99 20 )00 7-3 0623 (02 S-000
机 电 系 统 低 速 非 线 性 补 偿 仿 真 研 究
陈 娟 郭 劲2 张 淑 梅 2 , ,
( . 春 工 业 大 学 电气 与 电 子 工程 学 院 ,吉林 长 春 1长 10 1 ; 30 2 2 .中 国科 学 院 长 春 光 学 精 密 机 械 与 物 理 研 究 所 光 电 工 程 部 ,吉 林 长 春 10" ) 30 2 2
传感器信号的线性化处理与非线性补偿_贾智伟
电子科技传感器信号的线性化处理与非线性补偿空军工程大学工程学院(西安710038) 贾智伟 汪 诚北方交通大学(北京100044) 刘红飞 摘 要 主要介绍了两种对传感器输出信号进行线性化处理的方法;同时,对传感器不可避免的非线性提出了线性补偿的方法。
关键词 传感器 非线性 线性化1 概述 在数字仪表中,对非电量的数字化测量所使用的传感器的一个重要指标就是数据的线性化。
但对于传感器来说,输出信号的非线性是绝对的。
这势必难以保证系统的精度与准确度,有时还得规定传感器的使用范围。
为了提高仪器和系统的精度,扩大其使用范围和提高系统的性能价格比,对传感器输出信号或其他模拟信号进行线性化处理与非线性补偿就显得尤为重要。
对传感器信号的线性化处理与非线性补偿方法比较多,但是大都存在如下缺点:电路复杂并且代价也高,从而不利于工程实际。
本文介绍的对传感器输出信号进行线性化处理与非线性补偿的方法,不仅精度高,而且还具有电路简单等优点。
2 线性化处理2.1 函数运算法有些类型的传感器的系统特性可以用函数关系来表示,对于此种类型的传感器,可以把其运算规则(反函数的)存入系统的微处理器,这样每测得一个参量,就可以通过处理器的计算得到一个需要的相应物理量。
例如振筒式传感器的输出信号(频率F)和输入信号(压强P)存在如下的函数关系:F=F01+KP把它的反函数关系存入系统中的处理器后,当测得一个F量时,经过计算就可以得到所需要的P值。
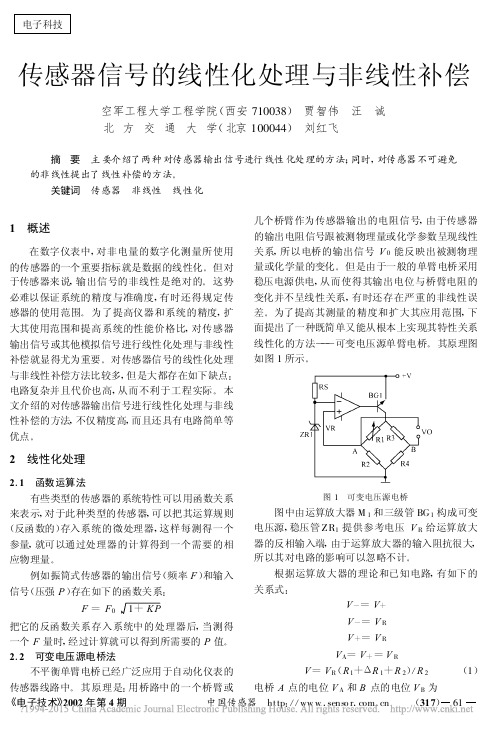
2.2 可变电压源电桥法不平衡单臂电桥已经广泛应用于自动化仪表的传感器线路中。
其原理是:用桥路中的一个桥臂或几个桥臂作为传感器输出的电阻信号,由于传感器的输出电阻信号跟被测物理量或化学参数呈现线性关系,所以电桥的输出信号V0能反映出被测物理量或化学量的变化。
但是由于一般的单臂电桥采用稳压电源供电,从而使得其输出电位与桥臂电阻的变化并不呈线性关系,有时还存在严重的非线性误差。
为了提高其测量的精度和扩大其应用范围,下面提出了一种既简单又能从根本上实现其特性关系线性化的方法———可变电压源单臂电桥。
称重传感器的基本原理及非线性误差补偿方法

2019年第2期农机使用与维修17输出电压为零。
当称重传感器负载,弹性敏感元件的应变会引起电阻应变片产生形变,理论情况下,负载力与电阻应变片的应变量应该成正比关系,但受到加工和安装以及材料的非线性影响,使负载力与应变量呈现一定的非线性关系。
此时图中的电阻应变片队和R4被拉伸,电阻值增大,而R2、R3被压缩,电阻值减小。
由于不同位置的电阻发生改变,此时电桥失去平衡,传感器会生成并输出压力测量电压U2,由于U2与所受负载成非线性关系,当负载越大,称重传感器的非线性误差也就越大[2]。
U图1电阻式压力传感器结构原理2.2非线性误差补偿方案为减少称重传感器非线性误差的影响,通过一定的技 术手段提升称重传感器输人和输出的线性关系程度,以保 证传感器工作过程的准确性和可靠性,提高测量、传输和 控制过程的稳定性。
对于称重传感器非线性误差的补偿 方法很多,按照补偿形式大体可以分为硬件补偿和人工神 经网络软件补偿两大类。
硬件补偿主要是利用一定的元器件或电子线路进行 非线性误差的矫正,其特点是相对简单便捷,是传统称重 传感器非线性误差补偿的常用方法。
随着生产力的不断 进步,工业上对称重传感器的非线性误差补偿精度提出了 更高的要求。
由于硬件补偿受到电子器件漂移和技术能 力的影响,难以做到全程补偿,其在准确性和可靠性上难 以满足更高的要求标准,因此,利用更新的计算机技术和 函数原理的软件补偿方式被快速开发。
近年来,通过神经 网络对称重传感器进行非线性误差补偿受到了越来越多 专业人士的重视,人工神经网络的函数逼近功能说明:对 于任意的连续函数或映射关系,必然会存在一个3层的前 向网络,能够以任意准确度逼近此函数或映射关系,如图 2所示。
除上述两种补偿方式外,还可通过多项式拟合法 和建立传感器的分度表的方法实现非线性误差的补偿,但 由于多项式拟合法复杂程度高,传感器分度表的存储器容 量有限,现阶段的使用量也都在逐渐减少[3]。
永磁同步电机逆变器非线性补偿控制

测器观测出反电势,进而经过一系列计算间接获
取转子位置和转速信息。由此看来,反电势观测
的准确度成为无位置传感器滑模控制的关键。
然而,随着滑模观测法的永磁同步电机无传感
器控制应用领域逐渐向高性能场合发展,一些关
键问题逐渐体现:如逆变器非线性、磁饱和以及
转子磁场谐波导致电机转子位置估计精度降低
波法[4]、模型参考自适应法[5]、载波频率成分法[6]
观测算法广泛应用于无位置传感器永磁同步电
机转子位置以及转速检测中[1]。首先通过滑模观
以及滑模观测法[7-8]等。其中,滑模观测法以结构
简单、抗干扰性强的优点,被广泛应用于永磁同
步电机无传感器驱动控制实际工程中。文献[9]
提出一种新型滑模观测器来实现永磁同步电机
等等[2]。
近年来,针对永磁同步电机无位置传感器控
制问题,国内外学者提出多种转子位置以及转速
基金项目:2017 年度校科研基金项目(11130300117014);
2017 年江苏省知识产权软科学研究计划项目(JSIP-2017-R-9)
作者简介:李玮(1972-),
女,
本科,
副教授,
Email:
czgclw@
中图分类号:TM301
文献标识码:
A
DOI:
10.19457/j.1001-2095.dqcd18994
Nonlinear Compensation Control of Inverter for Permanent Magnet Synchronous Motor
LI Wei
(School of Intelligent Equipment and Information Engineering,Changzhou Vocational
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
w
10
14
( mol / L )
2
V
pH的定义式:
pH lg H
H 10
pH
, , OH 10
14 pH
pH中和过程的稳态模型
被调液体 中 和 液
F2,C2, pH2
假设先混合后反应, 混合后 的酸与碱浓度x1, x2分别为
x1 F1 F1 F 2 c1 , x 2 F2 F1 F 2 c2
x
F 2 c 2 F1 c 1 F1 F 2
中和过程的动态模型
参见 p. 239 图14.3-3
pH中和过程的单回路控制
中 和 液 AC SP
被调液体
生成液
中和过程的变比值串级PID控制
中 和 液
F1
被调液体
F2
FC 生成液 AC
×
u2
pHm pHsp
pH中和过程的非线性控制
pHsp
u PID
GV (s)
f
GP (s)
+
+
pH
+
_
pHm GM (s)
讨论:由于pH中和过程非线性的特殊性,采用直接引入 “非线性增益补偿”环节的方法可自由地实现控制系统 开环增益的线性化。
中和过程非线性增益补偿原理
11 10 9
pH
8 7 6 5 4 3 0 10 非线性 控制器增益 控制点 pH 线性化增益 20 30 中和剂量/升溶液 40 50
增益非线性补偿方法举例1
蒸汽 RV T2
对象稳态关系:
u
TC
T2sp
c p R F ( T 2 T1 ) H V R V
对象增益:
K
工艺介质
p
T2 RV
HV c pRF
1 RF
T1 RF 凝液
补偿方法:通过合理选择调节阀的流量特性,实现广义 对象增益的近似线性。
非线性补偿方法举例2
补偿方法:通过引入 中间变量(本例中为 蒸汽量与工艺物料量 的比值),实现主对 象增益的近似线性 (本例中,指u(t) 与 T2(t) 的稳态增益)。
pH中和过程
中和反应:
被调液体 中 和 液
F2, pH2
H
OH
H 2O
中和反应平衡式:
F1, pH1
生成液
H OH K
F1,C1, pH1
生成液
V
中和反应的结果使混合液 中的剩余酸浓度为
x x 2 x1 [ OH
] [H ]
x 2
x
Kw [H
[H ]
]
[H
]
x
2
4
Kw
pH中和过程的非线性
pH lg[ H ] lg x
2
4
Kw
x , 2
对象非线性增益的补偿
对象增益非线性补偿方法
调节阀特性补偿,以使广义对象为近似线性; 串级控制方式,以克服副回路的非线性; 引入比值等中间参数,以主回路广义对象的增益为近 似线性; 变增益控制器:通过引入对象增益的反函数以使系统 的回路增益为线性; 自适应控制器:根据控制系统的性能自动调整控制器 的增益,以使系统的回路增益为近似线性。
TC
Fm
Fsp
FC 进料 出料
v(t) P1 P2
燃料油
补偿方法:通过引入串 级控制方式,以克服副 回路中的非线性,实现 主对象增益在一定条件 下的的近似线性(本例 中,指Fsp 与 出口温度 的稳态增益)。
非线性补偿方法举例3
u(t) × RF RVsp RV
FC
T2sp
TC
蒸汽
ห้องสมุดไป่ตู้
T2
凝液
工艺 介质