汽车ESP系统模型和模糊控制仿真
车辆主动悬架模糊控制器的设计及其仿真分析
( /) 车身加速度
图! 用拟合出的 "#$ 实现控制 [!] 林辉, 王林 " 迭代学习控制理论 [#] " 西北工业大学出版社, !$$% & !’ " [(] 焦李成 " 神经网络系统理论 [ #] " 西安 电子 科 技 大学 出 版 社, !$$’ & !( "
收稿日期: !""! # "$ # !"
! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! !
第 !" 卷
5 其中: 0 %( $ / ", $ / (, $" , $( , $, )
系统模型的建立
车辆悬架系统模型的建立 车辆悬 架 系 统 是 一 个
" " 1 % ’ " "
" " " ’ "
- &’ . !" &’ . !( " " " - ’ . !(
&’ . !" ( - &’ - &+ ) . !( " " "
基于路面识别的汽车ABS模糊仿真控制
1.整车模型 1.整车模型
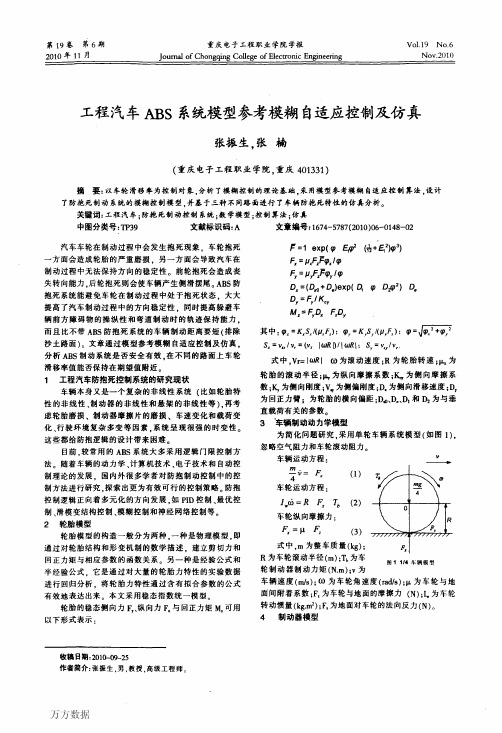
根据汽车理论车辆在制动过程的整车受力分析, 如图1所示。 根据整车受力模型,可以得到汽车纵向运动力平 衡方程[ 3 ] : FW + Ff + Fr =M Û V (1) 风阻方程 : FW = 1 21. 25 CdAfV2 (2) 式中 Ff , Fr —整车的前、后轮所受地面的纵向力; Fzf , Fzr —整车的 前、后轮所受地面反力;M —整车质量; V —整车的纵向速度; Û V — 整车的纵向加速度; Cd —风阻系 数; Fw —迎风阻力; Af —迎风面 积。
2. 2 路面识别系统设计
由于各种路面峰值附着系数对应的滑 移率不同, 基于滑移率的控制系统必 须对路面进行及时有效的识 别。控 制系统不断将实时获得的实际车轮减 速度与通 过计算得到的各种路面理 论角减速度进行比较,其中 绝对差值 最小者即判断为当前路面,具体识别 流程如 图5所示。
2.3 模糊控制器的设计
在制动过程中未发生抱死现象。 由图可以看出,在制动过程中未发生抱死现象。 制动路面从高附着路 图可以看出 在制动过程中未发生抱死现象 面变为低附着路面时,滑移率波 动较大;从低附着变为高附着路面时 从低附着变为高附着路面时,滑移 面变为低附着路面时 滑移率波 动较大 从低附着变为高附着路面时 滑移 在两个制动过程中,路面识别系统可以快速识别 率比较稳 定。在两个制动过程中 路面识别系统可以快速识别 路面并发 挥作用。当路面附着系数发生变化时,系统 挥作用。当路面附着系数发生变化时 系统 由于地面制动力的突变会产生 波动,但系统都能较快 地回到稳定的制动状态。 波动 但系统都能较快 地回到稳定的制动状态。
1.2 车轮模型
前轮: (1 +δf ) Iωf. ωÛf = Ff R - FR Tbf (3) 后轮: (1 +δr ) Iωr. ωÛr = FrR FR - Tbr (4) 式中 Iωf , Iωr —前、后 车轮的转动惯量;ωf ,ωr —前、后 车 轮的转动角速度; Tbf , Tbr —前、后 车轮制动器的制动 力矩; F—轮胎的 滚动阻力;δf ,δr —汽车转动部分转换 到前、后车轮上的等效转动惯量转 换系数。
工程汽车系统模型参考模糊自适应控制及仿真
程是通过对原控制器的输出进行补偿实现的。仿真结果 如图4、5所示。
模型参考模糊自适应控制系统 模型参考自适应控制系统如图2所示。
图4滑移率变化曲线 图2模型参考模糊自适应控制系统 控制器参数的自适应调整过程是:当参考输入同时 加到系统和参考模型的入口时.由于对象的初始参数未 知,控制器的初始参数不可能调整得很好。因此.刚开始 运行时系统的输出响应和模型的输出响应是不可能完全 一致的,结果产生偏差信号,由驱动自适应系统。产生适 当的调节作用,直接改变控制器的参数.从而使系统的输 出逐步与参考模型输出接近为止。然后.自适应参数调整 过程也就自动终止。当对象特性在运行过程中发生了变 化时.控制器参数的自适应调整过程与上述过程完全 一样。
式中,m为整车质量(kg); R为车轮滚动半径(m);Tb为车 轮制动器制动力矩(N.m);v为角速度(rad/s);雎为车轮与地 面闻附着系数;FI为车轮与地面的摩擦力(N);I。为车轮
4
转动惯量(kg.m2);Fl为地面对车轮的法向反力(N)。 制动器模型
perfb瑚ed
under three different road surface conditions.
Key words:Engineering automobile;the Anti-lockBraking System;mathematics models;control algorithm;simulation
汽车车轮在制动过程中会发生抱死现象.车轮抱死 一方面会造成轮胎的严重磨损.另一方面会导致汽车在 制动过程中无法保持方向的稳定性。前轮抱死会造成丧 失转向能力,后轮抱死则会使车辆产生侧滑摆尾。ABS防 抱死系统能避免车轮在制动过程中处于抱死状态.大大 提高了汽车制动过程中的方向稳定性.同时提高躲避车 辆前方障碍物的操纵性和弯道制动时的轨迹保持能力. 而且比不带ABS防抱死系统的车辆制动距离要短(排除 沙土路面)。文章通过模型参考模糊自适应控铜及仿真. 分析ABS制动系统是否安全有效.在不同的路面上车轮 滑移率值能否保持在期望值附近。
载货汽车EPS系统粒子群优化模糊控制仿真分析

载货汽车EPS系统粒子群优化模糊控制仿真分析杨意品;曹兴举;巩建强【摘要】提出了一种基于粒子群优化模糊控制的载货汽车EPS系统控制策略,在完成载货汽车EPS系统总体设计的基础上,结合驾驶人转向操纵主观感受及对路感的要求设计了助力特性曲线,建立了转向系模型,7自由度整车动力学模型,直流电动机模型,以直流电机电流作为控制目标,采用粒子群优化模糊控制策略,以MATLAB/Simulink作为仿真平台,以自卸货车为研究车型建立了装备EPS系统的载货汽车仿真模型。
仿真实验结果表明:与传统模糊控制相比较,粒子群优化模糊控制能够有效地提升载货汽车EPS系统的整体动态响应,并且取得了良好的转向轻便性和操纵稳定性。
【期刊名称】《制造业自动化》【年(卷),期】2016(000)001【总页数】6页(P92-96,111)【关键词】载货汽车;电动助力转向;助力特性曲线;粒子群优化;模糊控制;仿真【作者】杨意品;曹兴举;巩建强【作者单位】新疆交通职业技术学院,乌鲁木齐831401;新疆交通职业技术学院,乌鲁木齐 831401;交通运输部公路科学研究院,北京 100088【正文语种】中文【中图分类】TP391电动助力转向系统(electric power steering,EPS)与液压助力转向系统相比,由于其自身的优点已经广泛应用于乘用车领域。
载货汽车转向系统多采用循环球式转向器,目前普遍应用液压助力转向系统或者是电子液压助力转向系统。
与乘用车相比较,载货汽车前轴载重大,并且转向系统的结构不同,因此载货汽车EPS系统的总体设计及控制策略的制定更加需要有针对性[1,2]。
在乘用车EPS系统控制领域,国内外研究机构及专家学者已经开展了大量的研究并取得了一定的研究成果,主要采用PID控制算法[3]、模糊控制算法[4]、模糊PID控制算法[5]、神经网络PID控制算法[6]、神经网络控制算法[7]、滑模控制算法[8]以及H∞控制理论[9]等。
汽车建模与仿真
基于MATLAB的汽车ESP系统控制模型及方法研究摘要:汽车电子稳定装置ESP是继汽车防抱死制动系统和汽车驱动防滑控制系统之后,汽车主动安全性的又一重大飞跃。
ESP系统能根据路面状况及汽车运动状态控制车辆的运动,防止汽车操纵失控,从而更加有效地提高汽车稳定性能和行驶安全性。
本文针对ESP系统的特性,建立了合理的自由度汽车模型,并针对ESP系统的控制方法提出了以模糊控制技术为核心的三种控制方法,进行了仿真研究。
关键词:汽车电子稳定装置;汽车稳定性能;汽车模型Abstract:The Electronic Stability System is all ascensive progress since the automotive anti-lock braking and anti-skid control system succeeded in the aspect of automotive active safety.For the ESP could adjust the automobiles to the road condition and moving status,it effectively prevents the occurrence of runaway operation so that the stability and the safety will be reinforced.This thesis aims at putting forward a fuzzy control technology as the core of the 3 main ways to do the simulation research in connection with the specific characteristic of ESP and the establishment of a vehicle model in an appropriate modulation.Key words:braking;ABS;modeling and simulation前言现如今,汽车在我们的生活中已经不可缺少,而从汽车诞生时起,汽车的安全性就扮演着至关重要的角色。
基于横摆角速度的汽车ESP系统模糊反馈控制方法
汽车技术
其中汽车前轮和后轮所受到的侧向力与其相 ( ().’0・ ()/’0・ !) . -.; / -/ 式中: -.’#.!. -" ; % ( -/’.!& / " 。 $) % 将式( 、 ( 带入到公式( 中并进行 0123145 变 !) $) () 换可以得到线性二自由度单轨模型的传递特性*+67,, 进行简化可得:
向输入与车辆横摆角速度之间的线性关系。因此, 控制系 统 需 要 得 到 参 考 的 横 摆 角 速 度 和 参 考 的 质 心侧偏角的时候, 一般是通过二自由度线性单轨模 型计算 得 到 汽 车 的 参 考 横 摆 角 速 度 和 参 考 的 质 心 侧偏角。 线性二自由度车辆运动方程为:
—— 1 —复变量; —— < —汽车沿 # 轴方向的速度; —— %—汽车沿 " 轴方向的速度; —— #—转向轮转角。 由式( 可知, 根据前轮转角以及车速( 恒定车 )) 速) ,可以得到参考的横摆角速度和参考的质心侧 偏角。
!"#
横摆角速度反馈控制模糊控制器设计 控制框图如图 % 所示。模糊控制器的输入变量
模糊规则表
为实际 横 摆 角 速 度 与 汽 车 参 考 模 型 输 出 的 参 考 横 摆角速度之间的误差以及误差的变化率,记作 ! , 横摆调节力矩 # 作为模糊控制器的输出变量& 控 !" , 制器根 据 输 入 量 的 变 化 计 算 出 所 需 的 横 摆 调 节 力 矩的大小。
" ( " 1) ’2 8 ( $ # (&351 # ! ( (:391 $ 1) ’2 9 # (&( 4 5 6) 1&( ( 5 6) 1! %
基于模糊控制的汽车建模仿真
图 2 横摆角速度增益随车速的响应曲线 ! 下转第 *+ 页 "
万方数据
吕其惠 等 & 液压挖掘机电液位置控制系统动态分析与仿真
!""# 年 ! 月
运动参数变化较大 !"#’ ( 之后 ! 曲线趋于平稳 ! 系统 处于稳定工况 $ 阻尼越大 !振荡越小 ! 超调量也越小 ! 表明增大阻尼 ! 系统的快速性降低 ! 但稳定性变好 $ 液压挖掘机工作装置电液比例控制系统是强非线性 时变系统 $
!! " 韩 健 保 # 云 志 刚 # 陈 厉 兵 " 汽 车 电 子 稳 定 系 统 12. 的 工 作 原 理 及 应用 !3 "" 汽车电器 #$%%* #&* ’" !$ " 王德平 # 郭孔辉 # 宗长富 " 车辆动力学稳定性控制的理论研究 !# " " 汽车工程 #$%%% #&! ’" !, " 韩 峻 峰 # 李 玉 惠 等 编 著 " 模 糊 控 制 技 术 !4 "" 重 庆 ( 重 庆 大 学 出 版 社 #$%%," !* " 张 国 良 # 曾 静 # 柯 熙 政 # 邓 方 林 " 模 糊 控 制 理 论 及 其 567869 应 用 !4 "" 西安 ( 西安交通大学出版社 #$%%$" !+ " 王 沫 然 编 著 # 陈 怀 琛 审 校 ":;5<8;=>* 建 模 及 动 态 仿 真 !4 "" 北 京 ( 电子工业出版社 #$%%$"
汽车ESP系统模型与模糊仿真
科技资讯 SC I EN C E &TE C HN O LO G Y I NF O R MA T IO N 工 程 技 术基于模糊自寻优控制的汽车主动控制系统的仿真参数分为静态参数和动态参数。
静态参数主要包括:汽车基本外型参数、转动惯量、轮胎特性参数、弹簧和减振器特性参数等。
这些参数是在汽车静态下测量得到的,因此不需要传感器的参与。
汽车动态参数是在汽车驾驶过程中通过传感器测量得到的汽车实时状态参数。
汽车动态参数主要包括汽车横摆角速度、侧向加速度、车轮轮速以及转向盘转角等参数。
1 汽车静态参数的确定1.1汽车质心高度汽车质心高度是汽车操纵稳定性的一个重要的静态参数,所以,首先给出汽车质心高度的测量方法。
在测量质心高度时,要将制动力释放,将传动系统处于自然位置,同时车轮能够自由转动。
1.2汽车转动惯量的测量汽车绕轴转动惯量是汽车保持前进而不发生甩尾的重要参数。
汽车转动惯量的测量原理,应用欧拉公式可以得到计算汽车转动惯量的公式。
1.3汽车轮胎特性汽车轮胎是汽车与地面之间的传力元件,起着承载、转向、驱动、制动的作用,其性能的优劣将直接影响到汽车的动力性、转向操纵性、行驶平顺性、越野性、乘坐舒适性以及安全性等。
1.4汽车悬架特性减振弹簧的特性尽管弹簧的特性不是线性的,但是可以用不同斜率的包络直线得到轮胎在静载荷下的特征。
2 汽车主动控制子系统模型在汽车主动控制子系统中,共包括四个模块:传感器、控制器、执行器和结果的真实性核对和容错开关模块。
在这个子系统中,有七个输入变量:汽车转向盘转角、横摆角速度、纵向和侧向加速度、车轮转速、制动和驱动力矩等。
输出变量有2个,施加给四个车轮的驱动力矩和制动力矩。
在子系统中,加入了故障存储器,一旦主动控制系统出现故障,ECU将只允许驾驶员对汽车进行操纵;如果主动控制系统正常运行,则容错开关开启,子系统允许汽车由主动控制系统和驾驶员同时控制。
在驾驶状况良好的时候,容错开关的值设为1,这时,驱动力矩不做调整,当遇到紧急情况或者路面状况坏时,汽车主动控制子系统将对发动机管理系统发出信息,管理发动机增加或者减小驱动力矩,同时,制动系统也随着做出相应的调整。
基于模糊控制的汽车ESP系统仿真_英文_欧健
床
与
液
压
Sep. 2014 Hydromechatronics Engineering Vol. 42 No. 18 DOI: 10. 3969 / j. issn. 1001-3881. 2014. 18. 006
Table 1. Part parameters of the vehicle modle Name Vehicle mass Yaw moment of inertia Centroid to the front axle distance Centroid to the rear axle distance Track Centroid height Front axle total cornering stiffness Rear axle total cornering stiffness Steering ratio Symbol m I α b l h Kf Kr r Numerical 1 528 6014 1. 48 1. 08 1. 52 0. 43 - 62 000 - 110 000 26. 7 Unit kg kg·m2 m m m m N / rad N / rad —
2. The simulation model
2. 1. Multibody vehicle dynamics model Vehicle modeling based on the ADAMS / Car module uses the modeling method from bottom to top [ 4] . At first the template was built,and then was subsystem,finally a vehicle was assembled. Due to only qualitatively analysis the handling stability of the vehicle in extreme working conditions in this paper , so in addition to brake subsystem direct call steering subsystem,front suspension subsystem,rear suspension subsystem,body subsystem, front wheels and rear wheels subsystem. For the brake subsystem ,the original three channel disc brake system is changed into a four channel disc brake system. In the braking system template redefine brake pressure state varia-
ESP—汽车电子稳定系统仿真研究
ESP—汽车电子稳定系统仿真研究一、概要随着科技的不断发展,汽车行业在追求高性能、低成本和长寿命的也面临着更加复杂的操控环境和安全隐患。
为了提高汽车的安全性能和操控稳定性,越来越多的电子设备被应用到汽车上,其中最具代表性的就是汽车电子稳定系统(ESP)。
本文将对ESP进行仿真研究,探讨其在不同驾驶场景下的性能表现和潜在的改进方向。
本文首先介绍了ESP系统的基本原理和组成,包括轮速传感器、加速度传感器、制动压力传感器等,以及它们如何协同工作以实现车辆稳定控制。
通过建立ESP仿真模型,分析了其在不同路面条件、驾驶员操作和车辆运行状态下的性能表现。
针对仿真结果中存在的问题提出了相应的改进措施和建议。
本文通过对ESP系统的深入研究和仿真分析,为进一步提高汽车电子稳定系统的性能提供了有价值的参考和借鉴。
二、ESP系统的关键技术ESP系统,即汽车电子稳定程序,是现代汽车主动安全防御系统的重要组成部分。
它通过集成多种传感器和控制系统,实时监测并控制车辆的运动状态,以提供卓越的运动性能和稳定性。
在ESP系统中,关键技术主要包括:数据采集与处理:ESP系统依赖于大量的传感器来实时获取车辆关键状态信息,如车轮速度、加速度、角速度等。
这些传感器产生的数据经过精确的处理,以便实时传送给控制器。
数据采集与处理技术直接影响到ESP系统的性能和准确性。
控制算法执行:ESP系统根据接收到的传感器数据进行决策,并生成相应的控制指令来调整车辆的行驶方式。
这包括制动、节气门和转向控制等多个方面。
控制算法执行是ESP系统实现稳定控制的核心。
车辆动态模型建立:为了精确地预测车辆的动态行为,ESP系统采用了先进的车辆动态模型。
该模型考虑了车辆的质量分布、质心位置、悬挂系统和轮胎力学特性等多种因素。
通过建立准确的车辆动态模型,ESP系统能够更有效地预测和处理各种复杂路况。
实时性与稳定性:ESP系统在设计过程中充分考虑了实时性和稳定性两个重要指标。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
( 4)
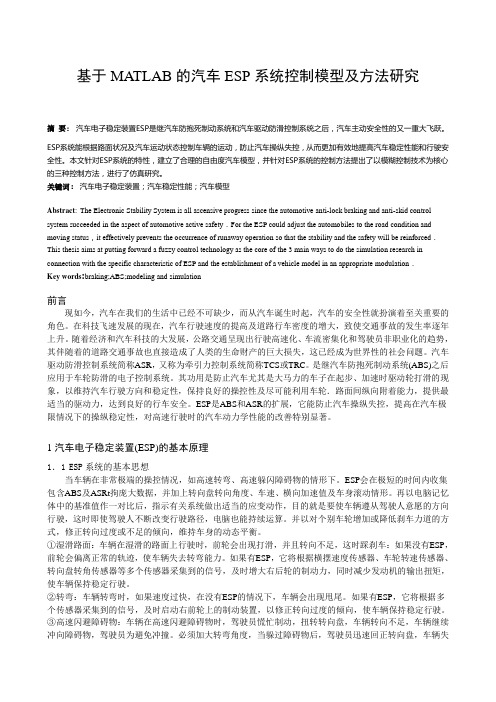
( 1 ) —( 4 ) 式中: M 为整车质量; v y 为汽车的侧向车 速; v x 为汽车的纵向车速; γ 为汽车的横摆角速度; F xfl , F xfr , F xrl , F xrr 分别为前左、 前右、 后左、 后右轮纵 F yfr , F yrl , F yrr 分别为前左、 向力; F yfl , 前右、 后左、 后 b 右轮侧向力; δ 为前轮转角; I z 为横摆转动惯量; a, d2 分别为前、 分别为质心到前、 后轴的距离; d1 , 后轮 的轮距; I w 表示车轮的转动惯量; ω 为车轮的角速 度; T bi 为各轮上的制动力矩; R 为车轮半径; i = fl, fr, rl, rr 分 别 代 表 前 左、 前 右、 后 左、 后 右 轮。 ( 1 ) —( 4 ) 式中参数上方带点的表示一阶导数 1. 2 轮胎模型
Dynamic model and simulation of fuzzy controlling for vehicle ESP
OU Jian,FANG Zhanpeng ,WANG Linfeng
( Chongqing University of Technology,Chongqing Institute of Automobile,Chongqing 400050 ,P. R. China)
Vol. 22 No. 4 第 22 卷第 4 期 重庆邮电大学学报( 自然科学版) Journal of Chongqing University of Posts and Telecommunications( Natural Science Edition) Aug. 2010 2010 年 8 月
· 518·
重 庆 邮 电 大 学 学 报( 自然科学版) F yf = C f α f , F yr = C r α r , ( 9) ( 10 ) ( 11 ) ( 12 ) αf = β + ar br - δ, αr = β - u u
第 22 卷
的垂直载荷可表示为 x h - v y hb F Zfl = M g b - v 2l 2l d1 l F Zfr F Zrl F Zrr
图1 Fig. 1
整车动力学模型
( 7) 计算纵向力 F x0 时 C = b0 , D = b1 F2 z + b2 F Z , b3 F2 Z + b4 F Z , E = b6 F2 S h = b9 F Z + z + b7 F Z + b8 , b5 F Z CDe Sv = 0 ( 8) b10 , ( 8 ) 式中,μ 为路面附着系数。 从 MF 轮胎模型得到侧向力和纵向力, 在制动 / B = 驱动和转向联合工况下需要采用滑移率 λ 和侧偏角 α 修正 σx σy 2 2 Fx = F x0 , Fy = F , σ = 槡 σx + σy , σ σ y0 tan α λ , σx = - σ =- 1 +λ y 1 +λ 基于此模型的某型轮胎参数如表 1 、 表 2 所示。
[ 3 4] 本文选用 magic formula( MF) 轮胎模型
表 2 纵向力 — 滑移率拟合系数 Longitudinal forceslip rate fitting coefficient b1 - 9 . 46 b7 b2 1 490 b8 1. 2 b3 130 b9 0 . 029 9 b4 276 b10 - 0 . 176 b5 0 . 088 6
Dynamic model of vehicle
纵向动力学方程 x - v y γ) = ( F xfl + F xfr ) cos δ - M( v ( F yfl + F yfr ) sin δ + F xrl + F xrr 横向动力学方程 y + v x γ) = ( F xfl + F xfr ) sin δ + M( v ( F yfl + F yfr ) cos δ + F yrl + F yrr 横摆运动方程 = ( Fxfl + Fxfr ) sin δa + Iz γ ( F yfl + F yfr ) cos δa + ( F yrl + F yrr ) b -
汽车 ESP 系统模型和模糊控制仿真
欧 健, 房占鹏, 王林峰
( 重庆理工大学 重庆汽车学院, 重庆 400050 )
摘
要: 汽车电子稳定系统( electronic stability program,ESP) 是行驶车辆的一种主动安全系统 。它综合了制动防抱
死系统, 驱动力控制系统和横摆力矩控制系统使行驶车辆的安全性得到很大地提高 。 建立了七自由度整车模型 、 magic formula 轮胎模型以及车辆参考模型, 采用车辆质心侧偏角的状态差异法, 应用模糊控制理论设计了质心侧偏 角反馈控制器, 将建立的模糊控制器模型和汽车动力学模型组合起来, 并通过前轮转角阶跃输入和正弦输入, 在常 见的易于失稳的湿滑路面上对典型工况进行仿真 。结果表明: 所设计的控制器可以很好地控制汽车的横摆角速度 提高了车辆的稳定性。 和质心侧偏角, 关键词: 电子稳定系统( ESP) ; 质心侧偏角; 模糊控制 中图分类号: TP27 文献标识码: A 825X( 2010 ) 04051605 文章编号: 1673-
0 . 004 02 - 0 . 061 5
1. 3
辅助计算模块
y( x) = D sin { C arctan { B ( x + S k ) ( 1 - E ) + E arctan[ B ( x + S k ) ]} } + S v 计算侧向力时 ( 5)
在 MF 轮胎模型中要求的车轮的纵向力和侧向 力就需要知道该车轮的垂 直 载 荷、 侧偏角以及滑 。 移率 轮胎的垂直载荷由静态载荷和动态载荷组成 , 其中动态载荷由车辆在运动时的纵向加速度和侧向 加速度引起的。 忽略侧向风和路面坡度的影响, 轮胎
0511 修订日期: 20100622 收稿日期: 20102008BB6338 ) 基金项目: 重庆市自然科学项目基金( CSTC, Foundation Item: The Natural Science Foundation Project of CQ CSTC( CSTC, 2008BB6338 )
Tab. 1 a0 1 . 65 a7 0 . 773 9 Tab. 2 b0 2 . 372 72 b6 表 1 侧向力 — 侧偏角拟合系数表 Lateral forcelateral angle fitting coefficient table a1 - 34 a9 0 . 013 4 a2 1 250 a10 0 . 003 7 a3 3 036 a12 1 . 213 6 a4 12 . 8 a13 6 . 262 a6 - 0 . 021
Abstract: The electronic stability program ( ESP) was introduced in this paper. It was an active safety system which consisted of antibraking system,traction control system and yaw moment control and could improve the safety of the vehicle. The 7dof whole vehicle model, the magic formula ( MF) tire model and vehicle reference model were built. Based on fuzzy control principle,the synthesized feedback control of vehicle side slip angle was designed by using the method of different states of side slip angle,and the fuzzy controller model and vehicle dynamics model were combined and simulated through the front wheel angle step input and sinusoidal input in the slippery road surface using typical operating conditions. The results show that the designed controller can effectively enhance the stability by controlling the yaw rate and side slip. Key words: electronic stability program( ESP) ; side slip angle; fuzzy control
( 1)
( 2)
1 ( F - Fxfl ) cos δd1 + 2 xfr
1 ( F yfl - F yfr ) sin δd1 - 2 ( 3)
1 ( F xrl - F xrr ) d2 2
车轮的转动动态方程可表示为 i = - T bi + F xi R ( i = fl, Iw ω fr, rl, rr)
模型复杂, 因此, 采用常规的控制理论很难达到预期 的控制效果。而模糊控制系统由于不需要建立控制 系统的精确数学模型, 可以避免因系统建模误差带 来的不良影响。 本文采用质心侧偏角的状态差异法, 应用模糊 控制理论设计了质心侧偏角反馈控制器 , 并在转向 盘的阶跃输入和正弦输入工况下对模型进行仿真 。