机械原理轮系复习题
机械原理试题及答案5
第八章轮系一、选择题1.轮系可以分为________两种类型。
A.定轴轮系和差动轮系B.差动轮系和行星轮系C.定轴轮系和复合轮系D.定轴轮系和周转轮系2.差动轮系的自由度为_________。
A.1B.2C.3D.43.行星轮系的自由度为__________。
A.1B.2C.3D.44.在定轴轮系中,设轮1为起始主动轮,轮N为最末从动轮,则定轴轮系始末两轮传动比数值计算的一般公式是i1n=_________。
A.轮1至轮N间所有从动轮齿数的乘积 / 轮1至轮N间所有主动轮齿数的乘积B.轮1至轮N间所有主动轮齿数的乘积 / 轮1至轮N间所有从动轮齿数的乘积C.轮N至轮1间所有从动轮齿数的乘积 / 轮1至轮N间所有主动轮齿数的乘积D.轮N至轮1间所有主动轮齿数的乘积 / 轮1至轮N间所有从动轮齿数的乘积5.在运用反转法解决周转轮系传动比的计算问题时,下列公式中________是正确的。
A.i H mn=(nm —nH)/(nn—nH) B.i Hmn=(nn—nH)/(nm—nH)C.i Hmn =(nH—nn)/(nm—nn) D.i Hmn=(nm—nn)/(nn—nH)6.基本周转轮系是由________构成。
A.行星轮和中心轮B.行星轮、惰轮和中心轮C.行星轮、行星架和中心轮D.行星轮、惰轮和行星架7.下列四项功能中,哪几项_______可以通过轮系的运用得以实现。
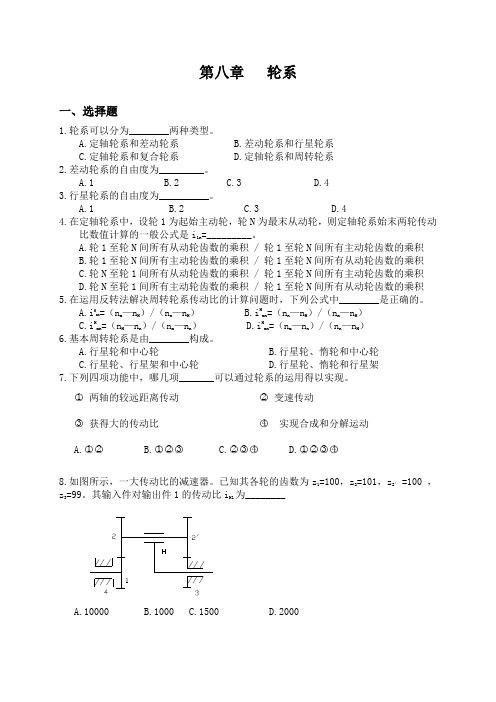
○1两轴的较远距离传动○2变速传动○3获得大的传动比○4实现合成和分解运动A.○1○2B.○1○2○3C.○2○3○4D.○1○2○3○48.如图所示,一大传动比的减速器。
已知其各轮的齿数为z1=100,z2=101,z2’=100 ,z 3=99。
其输入件对输出件1的传动比iH1为________A.10000B.1000C.1500D.2000二、判断题1.定轴轮系的传动比数值上等于组成该轮系各对啮合齿轮传动比的连乘积( )2.周转轮系的传动比等于各对齿轮传动比的连乘积。
南京理工大学机械原理题库 轮系及其设计
07 轮系及其设计1.平 面 定 轴 轮 系 传 动 比 的 大 小 等 于 ;从 动 轮 的 回 转 方 向 可 用 方 法 来 确 定。
2.所 谓 定 轴 轮 系 是 指 ①, 而 周 转 轮 系 是 指 ②3.在 周 转 轮 系 中, 轴 线 固 定 的 齿 轮 为 ;兼 有 自 转 和 公 转 的 齿 轮 称 为 ; 而 这 种 齿 轮 的 动 轴 线 所 在 的 构 件 称 为 。
4.组 成 周 转 轮 系 的 基 本 构 件有: , , ;i k 1 与i k H1 有 区 别,i k 1 是 ;i k H1 是 ;i k H1 的 计 算 公 式为 , 公 式 中 的 正 负 号 是 按 来确 定 的。
5. 行 星 轮 系 齿 数 与 行 星 轮 数 的 选 择 必 须 满 足 的 四 个 条件 是①条件、 ②条件、 ③条件、 ④条件。
6.定 轴 轮 系 的 传 动 比 等 于 各 对 齿 轮传 动 比 的 连 乘 积。
- - - - - - - - - - - - - -- - - ( )7.周 转 轮 系 的 传 动 比 等 于 各 对 齿 轮 传 动 比 的 连 乘 积。
- - - - - - - - - - - - -- - - - - ( )8.行 星 轮 系 中 若 系 杆 为 原 动 件 可 驱 动 中 心 轮, 则 反 之 不 论 什 么 情 况, 以 中 心 轮 为 原 动 件 时 也 一 定 可 驱 动 系 杆。
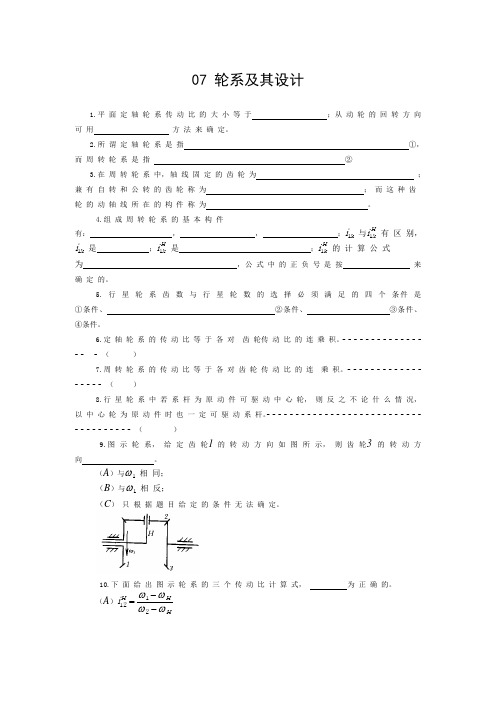
- - - - - - - - - - - - - - - - - - - - - - - - - - -- - - - - - - - - - ( )9.图 示 轮 系, 给 定 齿 轮1 的 转 动 方 向 如 图 所 示, 则 齿 轮3 的 转 动 方 向 。
(A )与ω1 相 同;(B )与ω1 相 反;(C ) 只 根 据 题 目 给 定 的 条 件 无 法 确 定。
机械原理题目轮系

第六章 轮系及其设计计算及分析题1、已知:Z 1=30,Z 2=20,Z 2’=30,Z 3 = 25,Z 4 = 100,求i 1H 。
2、图示轮系,已知各轮齿数Z 1=18,Z 2= Z 4=30,Z 3=78,Z 5=76,试计算传动比i 15。
12 34 5 H3、在图示轮系中,已知各轮齿数为Z 1=Z 3=30,Z 2=90,Z 2’=40,Z 3’=40,Z 4=30,试求传动比i 1H ,并说明I 、H 轴的转向是否相同?1I22’ 3 3’4 H4、在图示轮系中,已知各轮齿数为Z 1 =15,Z 2=20, Z 2’ = Z 3’= Z 4=30, Z 3=40,Z 5= 90,试求传动比i 1 H ,并说明H 的转向是否和齿轮1相同?5、在图示轮系中,已知各轮的齿数为Z 1= 20, Z 2=30,Z 3=80, Z 4=25,Z 5=50,试求传动比i 15。
6、在图示轮系中,已知各轮齿数为Z 1=19,Z 2=76, Z 2’= 40,Z 3=20,Z 4= 80,试求传动比i 1H 。
7、在图示轮系中,已知各轮齿数为Z 1= 20,Z 2’= 25,Z 2= Z 3=30,Z 3’= 20,Z 4=75,试求:(1)轮系的传动比i 1H 。
(2)若n 1=1000r/min ,转臂H 的转速n H =?4512 3H122’ 34 53’8、已知图示轮系中各轮的齿数Z1=20,Z2=40,Z3=15,Z4=60,轮1的转速为n1=120r/min,转向如图。
试求轮3的转速n3的大小和转向。
9、在图示轮系中,已知各轮齿数为Z1= Z3= Z4=20,Z2=40,Z5= 60,n1 = 800r/min,方向如图所示,试求n H的大小及转向。
10、在图示轮系中,已知各轮齿数为Z1=16 ,Z2=24,Z2’= 20,Z3=40,Z3’= 30,Z4= 20,Z5=70试求轮系的传动比i1H。
第六章轮系测试题及答案
第六章轮系测试题及答案一、选择题1. 齿轮传动中,齿数比是指()。
A. 齿轮的齿数B. 两个齿轮的齿数之比C. 齿轮的直径比D. 齿轮的周长比答案:B2. 轮系中,行星轮的作用是()。
A. 传递动力B. 改变传动比C. 改变旋转方向D. 以上都是答案:D3. 在齿轮传动中,如果主动轮的转速为1000转/分钟,从动轮的齿数是主动轮的两倍,那么从动轮的转速为()。
A. 500转/分钟B. 2000转/分钟C. 1000转/分钟D. 无法确定答案:A二、填空题1. 轮系中,如果主动轮的齿数为30,从动轮的齿数为60,那么齿数比为______。
答案:1:22. 在一个行星轮系中,太阳轮的转速为200转/分钟,行星轮的转速为100转/分钟,那么行星架的转速为______。
答案:150转/分钟三、简答题1. 请简述轮系的基本组成。
答案:轮系通常由主动轮、从动轮、行星轮和行星架组成。
2. 轮系在机械传动中有什么作用?答案:轮系在机械传动中主要用于改变转速和扭矩,实现动力的传递和分配。
四、计算题1. 已知一个齿轮传动系统,主动轮齿数为40,从动轮齿数为80,求传动比。
答案:传动比为2:1。
2. 一个行星轮系中,太阳轮齿数为20,行星架固定,行星轮齿数为40,求行星轮的转速,如果太阳轮的转速为500转/分钟。
答案:行星轮的转速为1000转/分钟。
五、论述题1. 论述齿轮传动和轮系传动在机械设计中的重要性。
答案:齿轮传动和轮系传动在机械设计中具有至关重要的作用。
它们不仅可以实现动力的高效传递,还可以通过改变齿数比来调整转速和扭矩,满足不同的工作需求。
此外,轮系传动还可以实现复杂的运动控制,如改变旋转方向和实现多轴驱动等,对于提高机械设备的性能和灵活性具有重要意义。
重庆大学机械原理章节习题库 5轮系
5轮系5.1轮系的分类依据是什么?5.2惰轮起什么作用?5.3蜗轮蜗杆转向判断方法是什么?5.4什么是周转轮系转化轮系?5.5如何判断周转轮系主从动件的转向关系?5.6正、负号机构,哪种效率高?5.7同心条件应满足的公式是什么?5.8 试确定图5-1a中蜗轮的转向,及图5-1b中蜗杆和蜗轮的螺旋线的旋向。
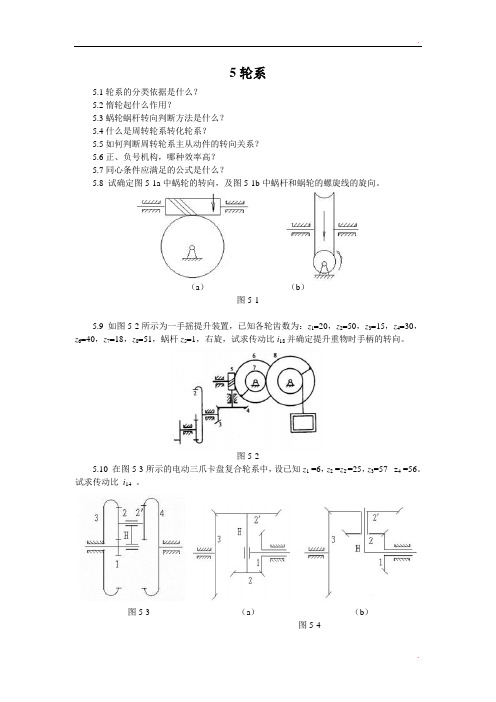
(a)(b)图5-15.9 如图5-2所示为一手摇提升装置,已知各轮齿数为:z1=20,z2=50,z3=15,z4=30,z6=40,z7=18,z8=51,蜗杆z5=1,右旋,试求传动比i18并确定提升重物时手柄的转向。
图5-25.10 在图5-3所示的电动三爪卡盘复合轮系中,设已知z1 =6,z2 =z2'=25,z3=57 z4 =56。
试求传动比i14。
图5-3 (a)(b)图5-45.11 如图5-4 a、b所示为两个不同结构的锥齿轮轮系,已知Z1 =20、Z2 =24、Z2' =30、Z3 =40,n1 =200 r/min,n3 =-100 r/ min。
试求两轮系杆n H=?5.12在图5-4所示示复合轮系中,设已知n1 =3549 r/ min,Z1 =36、Z2 =60、Z3=23、Z4 =49、Z4' =69 、Z5 =31、Z6 =131、Z7 =94、Z8 =36、Z9 =167,试求息杆H的转速n H =?图5-55.13图5-6所示轮系中,已知z1=40,z1'=20,z2=20,z3=40,z3'=60,z4=30,z4'=15,z5=30。
试求传动比i15。
图5-65.14图5-7所示轮系中,各轮均为标准齿轮,已知i14=7,z1=z4=24,z5=48。
试求传动比i16,并求齿数z2.z3.z6。
图5-75.15图5-8所示为某航空发动机的传动系统,已知Z1=35,Z3=97,Z3′=35,Z5=97,试求传动比i 15 。
机械原理典型例题(第七章轮系)
C.一个差动轮系。
习题评讲
7-8:所示轮系中,已知Z1=Z2=Z3’=Z4=20, 轮1、3、3’与5同轴线。试求传动比i15。
3 2 4 5
解:假设1的方向向上,则得5的 方向与1的方向一致。
z2 z3 z4 z5 i15 (1) z1 z2 z3 ' z4
m
1
3'
z3 z5 (1) z1 z3 '
解: (1) 定 轴 轮 系1-2
i12=n1/n2= Z2/Z1=40( 向下)
(2) 周 转 轮 系 :2’-(3-3’)-4-H(B) iB2’4=(n2’-nH)/(n4-nH)
=1-n2’/nH=1- i2’H
=- (Z3·Z4)/(Z2’ · Z3’) 故 i2’H=1- iB2’4
=1+(Z3· Z4)/(Z2’ · Z3’)= +20
i1H n1 1980000 nH
t i1H / n1 1440min 24h
基本概念题
1.选择题:
1)图示轮系属于 B 轮系。
A. 定轴;
C. 行星;
B. 差动;
D. 混合
2)图示轮系,给定齿轮1的转动方向如图所
示,则齿轮3的转动方向 C A. 与ω1相同; 。 B. 与ω1相反;
2
由同轴条件,正确啮合条件
r3 r1 2r2
m1=m2=m3;m3’=m4=m5
z3 z1 2 z2 60 z5 z3 ' 2 z4 60
i15 9
r5 r3 ' 2r4
7-10:图示差动轮系中,设已知各轮的齿数Z1=15, Z2=25,Z2’=20,Z3=60,n1=200r/min, n3=50r/min。试求系杆H转数nH的大小和方向:1)当n1、 n3转向相同时;2)当n1、n3转向相同时。
机械原理基础复习题(含答案)
机械原理基础复习题(含答案)一、单选题(共70题,每题1分,共70分)1、周转轮系传动比的计算通常采用()。
:A、反转法B、阻抗力法C、摩擦力法D、正转法正确答案:A2、()的自由度等于2,两个中心轮都运动,给定2个原动件机构的运动才是确定的。
:A、差动轮系B、定轴轮系C、行星轮系D、周转轮系正确答案:A3、一对标准齿轮,其安装距离大于标准安装中心距时,压力角()。
:A、不一定B、变大C、变小D、不变正确答案:B4、平面机构自由度的计算公式为F=3n-2PL-PH,其中n为活动构件个数,PL为低副个数,PH为()个数。
:A、活动构件B、低副C、高副D、机架正确答案:C5、对于满足杆长条件的四杆机构,若最短杆为机架,为()。
:A、曲柄滑块机构B、曲柄摇杆机构C、双摇杆机构D、双曲柄机构正确答案:D6、2K-H型周转轮系是具有()个太阳轮()个行星架的周转轮系。
:A、2、2B、1、1C、1、2D、2、1正确答案:D7、齿轮轮廓是()齿廓,此齿廓的提出已有近两百多年的历史,目前还没有其它曲线可以替代。
主要在于它具有很好的传动性能,而且便于制造、安装、测量和互换使用等优点。
:A、抛物线B、渐开线C、直线D、五次曲线正确答案:B8、()是指由于摩擦的原因,机构有效驱动力总是小于等于其摩擦力,使得机构无法运动的现象。
这种机构的自由度大于零。
:A、自由度F小于等于零B、死点C、自锁正确答案:C9、()机构用来传递任意两轴间的运动和动力,是机械中应用最广泛的一种传动机构。
:A、齿轮B、连杆C、间歇运动D、凸轮正确答案:A10、()接触面积大,表面接触应力小,润滑方便,不易磨损,制造较为容易,但能实现的相对运动少,适用于载荷较大、运动不是很复杂的场合。
:A、空间副B、高副C、平面副D、低副正确答案:D11、一对标准齿轮,模数为4,齿数分别为20,80,则其顶隙为()mm。
:A、2B、3C、4D、1正确答案:D12、对于满足杆长条件的四杆机构,最短杆的邻边为机架,得到()。
(完整版)轮系试题

轮系一、判断题(正确T,错误F)1.定轴轮系是指各个齿轮的轴是固定不动的。
()2.单一周转轮系具有一个转臂。
()3.单一周转轮系中心轮和转臂的轴线必须重合。
()4.周转轮系中的两个中心轮都是运动的。
()5.转化轮系的传动比可用定轴轮系求解,因此转化轮系中igj=ngnj的数值为有齿轮g到j间所有从动轮齿数相乘积与所有主动轮齿数相乘积的比值。
()6.行星轮系和差动轮系的自由度分别为1和2,所以只有差动轮系才能实现运动的合成或分解。
()二、单项选择题1.行星轮系的自由度为()。
A 1B 2C 3D 1或22.()轮系中必须有一个中心轮是固定不动的。
A定轴B周转C行星D差动3.()轮系中两个中心轮都是运动的。
A定轴B周转C行星D差动4.()轮系不能用转化轮系传动比公式求解。
A定轴B混合C行星D差动5.每个单一周转轮系具有()个转臂。
A 0B 1C 2D 36.每个单一周转轮系中心轮的数目应为()。
A 3B 2C 1D 1或27.每个单一周转轮系中,转臂与中心轮的几何轴线必须()。
A交错B相交C重合D平行8.两轴之间要求多级变速传动,选用()轮系合适。
A定轴B行星C差动 D B和C9.三轴之间要求实现运动的合成或分解,应选用()。
A定轴轮系B行星轮系C差动轮系 D A和B三、填空题1.轮系的主要功用是、、、。
2.定轴轮系是指。
3.周转轮系是指。
4.求解混合轮系的传动比,首先必须正确地把混合轮系划分为和各个,并分别列出它们的计算公式,找出其相互联系,然后。
四、计算题=900r/m in,z2=60,z2'=25,z3=20,z 3'=25,z4=20,z4'=30,z5=35,z5'=28,z6=135,求n6的大小和方向。
2.图示轮系中,已知z1=60,z2=48,z2'=80,z3=120,z3'=60,z4=40,蜗杆z4'=2,1.在图示轮系中,设已知双头右旋蜗杆的转速n 1(右旋),蜗轮z5=80,齿轮z5'=65,模数m=5mm。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
32. 在题43图中,已知蜗杆的转速min 9001r n =,602=z ,25'2=z ,
203=z ,25'3=z ,204=z ,30'4=z ,355=z ,28'5=z ,1356=z 。
(1)写出6116ωω=i ,6226ωω=i ,6
'56'5ωω=i 的表达式; (2)确定6n 的大小和转向。
解:(1)、54326543261162'
'''⋅⋅⋅⋅⋅⋅⋅⋅==z z z z z z z z z i ωω,方向通过划箭头来确定; 543265436226'
'''⋅⋅⋅⋅⋅⋅+==z z z z z z z z i ωω; 566565'
''+==z z i ωω; (2)、因为10828
30252521353520206025432654326116=⨯⨯⨯⨯⨯⨯⨯⨯=⋅⋅⋅⋅⋅⋅⋅⋅==''''z z z z z z z z z i ωω 所以min 33.8108
9001616r i n n ===
,方向“↑”,如图所示。
6
n 题43图
33. 题44图为一用于自动化照明灯具的轮系,已知
min 5.191r n =,601=z ,403=z ,
30'22==z z ,404=z ,1205=z 。
(1)轮系属于什么类型的周转轮系;
(2)确定箱体的转速和转向。
解:
(1)、因为13424323=-⨯-⨯=--=h l P P n F
所以该周转轮系属于行星轮系。
(2)、24030601204030)
1(42153251315-=⨯⨯⨯⨯-=⋅⋅⋅⋅-=---=''z z z z z z n n n n i H H H 因为05=n 所以311==H
H n n i 最后得箱体的转速为min 5.635.1911r i n n H H ===
,方向与n 1相同。
34. 计算题45图所示大减速比减速器的传动比G
A AG i ωω=。
解:15
47-=-=--=A B C B C A C AB z z i ωωωω 因为0=B ω,所以A C ωω6215= 17
155016⨯⨯-=⋅⋅-=--=F A G E C G C A C AG z z z z i ωωωω 将A C ωω62
15=代入上式,最后得 67.3306==
G
A AG i ωω
题44图 题44图 题45图
35. 题47图所示为一提升重物装置。
蜗杆E 为右旋。
当卷筒直径为250㎜, 齿轮A 的转
速为700r/min 时,确定重物上升的速度和齿轮A 的正确转向。
解:轮系是由定轴轮系(A-B-C-D-E-F-G )和周转轮系(G-K-H-L-M )组成的混合轮系。
对定轴轮系(A-B-C-D-E-F-G ),有 782
2128563942=⨯⨯⨯⨯=⋅⋅⋅⋅==E C A F D B G A AG z z z z z z n n i 对周转轮系(G-K-H-L-M ),有
81.139
223347)1(2=⨯⨯=⋅⋅-=--=L K M H G M G K G KM z z z z n n n n i 因为0=K n ,所以238.2==
M G GM n n i 所以564.174238.278=⨯=⋅==M
G G A M A AM n n n n n n i 所以min 4564.174700r i n n AM A M ===
最后得重物上升的速度为s mm D n v M 36.522250304230=⨯⨯=⋅⋅
=ππ 齿轮A 的正确转向为逆时针方向,如图所示。
36. 在题48图所示的轮系中,问当齿轮A 转动一转时,齿轮L 转动几转?两者的转向是否
一致?
题
47图
A n 题48图
解:轮系是由定轴轮系(A-B )、(A-D )和周转轮系(E-F-G-H-J-K-L-M )组成的混合轮系。
对定轴轮系(A-B ),有
220
40-=-=-==A B B A AB z z n n i 因为M B n n =,所以A M n n 5.0-=
对定轴轮系(A-D ),有
3
23624-=-=-==C D D A AD z z n n i 因为E D n n =,所以A E n n 5.1-=
对周转轮系(E-F-G-H-J-K-L-M ),有
3.645
40308540100-=⨯⨯⨯⨯-=⋅⋅⋅⋅-=--=K G E L J F M L M E M EL z z z z z z n n n n i 将A M n n 5.0-=,A E n n 5.1-=代入上式,最后得
34.0-==A
L LA n n i 即,当齿轮A 转动一转时,齿轮L 转动0.34转,转向与齿轮A 相反。
37. 题49图中,A n ,B n 为轮系的输入运动,C 为轮系的运动输出构件。
已知
m in,/100 m in,/50r n r n B A ==确定转速C n 的大小和转向。
解:(a )、轮系是由定轴轮系(1-2)和周转轮系(2-3-4-4’-5)组成的混合轮系。
对定轴轮系(1-2),有
)
(a )
(b c n c
n )
64(题49图
5
625301222112-=-=-===z z n n n n i A 即A n n 6
52-= 对周转轮系(2-3-4-4’-5),有
14
4535204550)1(43542222523235=⨯⨯=⋅⋅-=--=--='z z z z n n n n n n n n i C B 将min
50r n A =,min 100r n B =,A n n 652-=代入上式,最后得 min 8.59r n C =,方向“↓”,如图所示。
(b )、轮系是由定轴轮系(4-5-6)和周转轮系(1-2-2’-3-4)组成的混合轮系。
对定轴轮系(4-5-6),有 4
332244646446=====z z n n n n i B 即B n n 4
34= 对周转轮系(1-2-2’-3-4),有
9
17363264342132444341413-=⨯⨯-=⋅⋅-=--=--='z z z z n n n n n n n n i C A 将min 50r n A =,min 100r n B =,B n n 4
34=代入上式,最后得 min 24.88r
n C =,方向“↓”,如图所示。