机械原理题目---轮系
机械原理试题及答案5
第八章轮系一、选择题1.轮系可以分为________两种类型。
A.定轴轮系和差动轮系B.差动轮系和行星轮系C.定轴轮系和复合轮系D.定轴轮系和周转轮系2.差动轮系的自由度为_________。
A.1B.2C.3D.43.行星轮系的自由度为__________。
A.1B.2C.3D.44.在定轴轮系中,设轮1为起始主动轮,轮N为最末从动轮,则定轴轮系始末两轮传动比数值计算的一般公式是i1n=_________。
A.轮1至轮N间所有从动轮齿数的乘积 / 轮1至轮N间所有主动轮齿数的乘积B.轮1至轮N间所有主动轮齿数的乘积 / 轮1至轮N间所有从动轮齿数的乘积C.轮N至轮1间所有从动轮齿数的乘积 / 轮1至轮N间所有主动轮齿数的乘积D.轮N至轮1间所有主动轮齿数的乘积 / 轮1至轮N间所有从动轮齿数的乘积5.在运用反转法解决周转轮系传动比的计算问题时,下列公式中________是正确的。
A.i H mn=(nm —nH)/(nn—nH) B.i Hmn=(nn—nH)/(nm—nH)C.i Hmn =(nH—nn)/(nm—nn) D.i Hmn=(nm—nn)/(nn—nH)6.基本周转轮系是由________构成。
A.行星轮和中心轮B.行星轮、惰轮和中心轮C.行星轮、行星架和中心轮D.行星轮、惰轮和行星架7.下列四项功能中,哪几项_______可以通过轮系的运用得以实现。
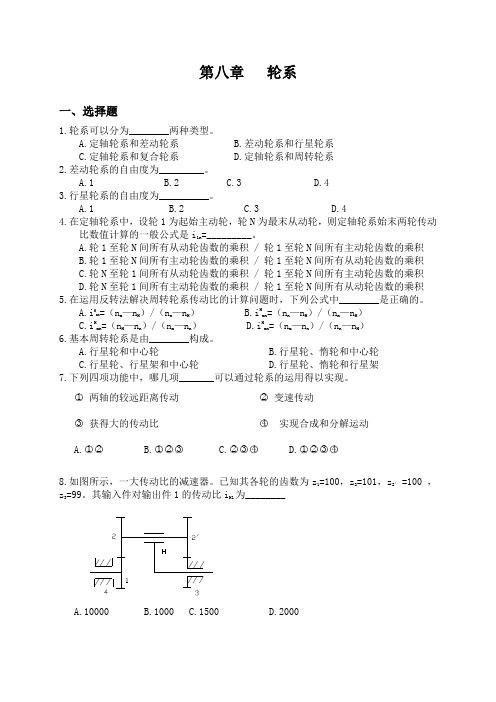
○1两轴的较远距离传动○2变速传动○3获得大的传动比○4实现合成和分解运动A.○1○2B.○1○2○3C.○2○3○4D.○1○2○3○48.如图所示,一大传动比的减速器。
已知其各轮的齿数为z1=100,z2=101,z2’=100 ,z 3=99。
其输入件对输出件1的传动比iH1为________A.10000B.1000C.1500D.2000二、判断题1.定轴轮系的传动比数值上等于组成该轮系各对啮合齿轮传动比的连乘积( )2.周转轮系的传动比等于各对齿轮传动比的连乘积。
机械原理-轮系例题
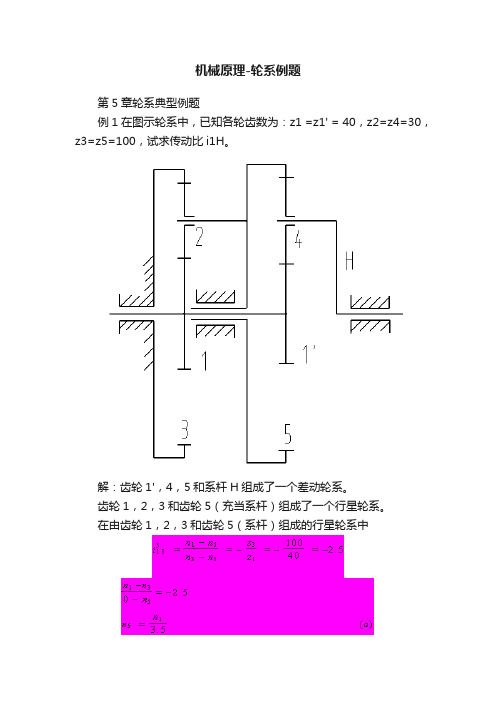
机械原理-轮系例题第5章轮系典型例题例1在图示轮系中,已知各轮齿数为:z1 =z1' = 40,z2=z4=30,z3=z5=100,试求传动比i1H。
解:齿轮1',4,5和系杆H组成了一个差动轮系。
齿轮1,2,3和齿轮5(充当系杆)组成了一个行星轮系。
在由齿轮1,2,3和齿轮5(系杆)组成的行星轮系中由于n 3=0,故有在由齿轮1',4,5和系杆H组成的差动轮系中即分析两个基本轮系的联系,可知n1= n1'(c)将(a),(c)两式代入(b),可得计算结果为正,表明从动系杆H和主动齿轮1的转向相同。
例2 在图示轮系中,已知各轮齿数为:z 1 = 90,z 2 = 60,z 2' = 30,z 3 =30,z 3' = 24,z 4 = 18,z 5 = 60,z 5' = 36,z 6 = 32。
运动从A,B两轴输入,由构件H输出。
已知n A=100r/min,n B=900r/min,转向如图所示。
试求输出轴H的转速n H的大小和方向。
解:齿轮3',4,5和系杆H组成了一个差动轮系齿轮1,2,2',3组成了一个定轴轮系,齿轮5',6组成了另一个定轴轮系。
对于齿轮3',4,5和系杆H组成的差动轮系,有即对于齿轮1,2,2',3组成的定轴轮系,有即对于齿轮5,6组成的定轴轮系,有即分析三个轮系之间的基本联系,有将该结果带入(a)式,可得化简整理后得计算结果为负,说明n H转向与n 5 相同,即n A,n B转向相反。
例3 在图示轮系中,已知齿轮1的转速为n 1 =1650 r/min,齿轮4的转速n4=1000r/min,所有齿轮都是标准齿轮,且z 2=z 5=z 6=20。
求各个齿轮中未知的齿轮齿数。
解:由齿轮1与齿轮3和齿轮6与齿轮4的同轴条件得齿轮1,2,3及系杆H1组成差动轮系;齿轮4,5,6及系杆H2组成行星轮系。
第11章-轮系习题答案

一、填空题:1.轮系可以分为:定轴轮系和 周转轮系 。
2.定轴轮系是指:当轮系运动时,各轮轴线位置固定不动的轮系;周转轮系是指:轮系运动时,凡至少有一个齿轮的轴线是绕另一齿轮的轴线转动的轮系。
3.周转轮系的组成部分包括: 太阳轮 、 行星轮 和 行星架 。
4.行星轮系具有 1个自由度,差动轮系有 2自由度。
5、行星轮系的同心条件是指:要使行星轮系能正常运转,其基本构件的回转线必须在同一直线上。
6、确定行星轮系中各轮齿数的条件包括:传动比条件、同心条件、均布条件、邻接条件。
7、正号机构和负号机构分别是指:转化轮系的传动比H 1n i 为正号或者负号的周转轮系。
动力传动中多采用 负号 机构。
二、分析计算题 1、在图示的车床变速箱中,移动三联齿轮a 使3’和4’啮合。
双移动双联齿轮b 使齿轮5’和6’啮合。
已知各轮的齿数为z 1=42,582=z ,38'3=z ,42'4=z ,48'5=z ,48'6=z 电动机的转速为n 1=1445r/min ,求带轮转速的大小和方向。
解:3858483842484258'5'31'6'426116-=⨯⨯⨯⨯=-==z z z z z z n n i min /9466r n -=(与电动机转动方向相反)2、在图示的轮系中,已知各轮齿数为20z z z z z 65321=====, 已知齿轮1、4、5、7为同轴线,试求该轮系的传动比17i 。
(1)z z z z z 41231225520100=++==⨯=z z z z 75612332060=+==⨯=(2)iz z z z zz z z z z17323467123561=-()=-⨯⨯=-100602020153、在图示轮系中,已知:蜗杆为单头且右旋,转速n11440= r/min,转动方向如图示,其余各轮齿数为:402=z,20'2=z,303=z,18'3=z,544=z,试:(1)说明轮系属于何种类型;(2)计算齿轮4得转速n4;(3)在图中标出齿轮4的转动方向。
第六章 轮系计算题专项训练(附答案)
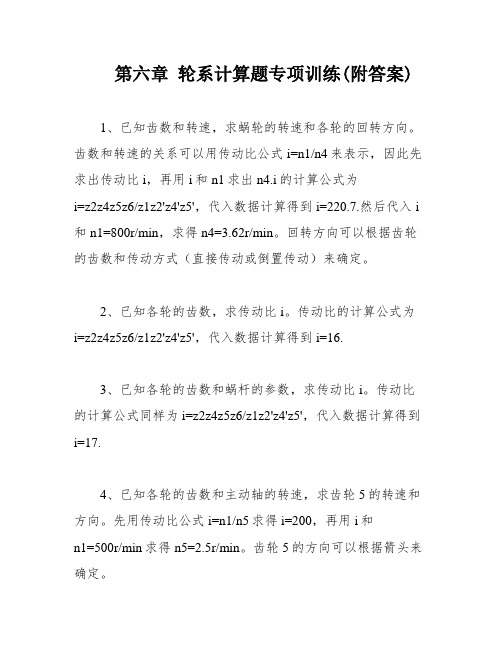
第六章轮系计算题专项训练(附答案)1、已知齿数和转速,求蜗轮的转速和各轮的回转方向。
齿数和转速的关系可以用传动比公式i=n1/n4来表示,因此先求出传动比i,再用i和n1求出n4.i的计算公式为i=z2z4z5z6/z1z2'z4'z5',代入数据计算得到i=220.7.然后代入i 和n1=800r/min,求得n4=3.62r/min。
回转方向可以根据齿轮的齿数和传动方式(直接传动或倒置传动)来确定。
2、已知各轮的齿数,求传动比i。
传动比的计算公式为i=z2z4z5z6/z1z2'z4'z5',代入数据计算得到i=16.3、已知各轮的齿数和蜗杆的参数,求传动比i。
传动比的计算公式同样为i=z2z4z5z6/z1z2'z4'z5',代入数据计算得到i=17.4、已知各轮的齿数和主动轴的转速,求齿轮5的转速和方向。
先用传动比公式i=n1/n5求得i=200,再用i和n1=500r/min求得n5=2.5r/min。
齿轮5的方向可以根据箭头来确定。
5、已知各轮的齿数,求传动比i。
传动比的计算公式同样为i=z2z4z5z6/z1z2'z4'z5',代入数据计算得到i=16.6、已知各轮的齿数和主动轴的转速,求传动比i和齿轮5的转动方向。
传动比的计算公式同样为i=z2z4z5z6/z1z2'z4'z5',代入数据计算得到i=40.齿轮5的方向可以根据箭头来确定。
7、已知各轮的齿数和蜗杆的参数,求传动比i和轮6的转速和方向。
传动比的计算公式同样为i=z2z4z5z6/z1z2'z4'z5',代入数据计算得到i=4.轮6的转速可以用传动比公式i=n1/n6求得,代入n1=1200r/min和i=4计算得到n6=300r/min。
轮6的方向可以根据蜗杆的旋转方向和箭头来确定。
机械原理轮系

机械原理轮系机械原理轮系是指由轮、带、链或齿轮等传动装置组成的一种机械传动系统,它通过传递动力和运动,实现不同部件之间的协调工作。
在工程和机械设计中,轮系是非常常见和重要的一种传动形式,它广泛应用于各种机械设备和工业生产中。
本文将从轮系的组成、工作原理和应用领域等方面进行介绍。
轮系的组成。
轮系通常由驱动轮和被动轮组成,驱动轮是传递动力的装置,而被动轮则是接受动力的装置。
在轮系中,驱动轮通过各种传动装置(如带、链或齿轮)将动力传递给被动轮,从而实现被动轮的运动。
轮系的组成还包括轴、轴承、支架等零部件,它们共同协作,保证轮系的正常运转。
工作原理。
轮系的工作原理是基于力的传递和转动的机械原理。
当驱动轮受到外部动力作用时,它通过传动装置将动力传递给被动轮,被动轮受到动力作用后开始运动。
在轮系中,传动装置起着至关重要的作用,它能够有效地传递动力,并根据需要进行速度和扭矩的调节。
不同类型的传动装置具有不同的特点和适用范围,工程师需要根据具体的工作要求选择合适的传动装置。
应用领域。
轮系广泛应用于各种机械设备和工业生产中,如汽车、飞机、船舶、机械加工设备等。
在汽车中,轮系通过传动装置将发动机的动力传递给车轮,从而驱动汽车行驶。
在飞机和船舶中,轮系也扮演着重要的角色,它们通过复杂的轮系传动装置,实现飞机和船舶的飞行和航行。
在机械加工设备中,轮系通过不同的传动装置,实现机械设备的各种加工运动,如旋转、升降、前进等。
总结。
机械原理轮系作为一种重要的机械传动形式,具有广泛的应用领域和重要的作用。
它通过传递动力和运动,实现不同部件之间的协调工作,为各种机械设备和工业生产提供了有效的动力支持。
在工程设计和生产实践中,工程师需要充分理解轮系的组成和工作原理,合理选择传动装置,确保轮系的正常运转,从而实现设备的高效运行和生产的顺利进行。
机械原理11-本科)-轮系

ω
H 3
ω1 i1H = = 1 + 1.875= + 2.875 ωH
ω
H 1
例 2:
在图示的周转轮系中, 在图示的周转轮系中,设已知 z1=100, z2=101, z2’=100, z3 = 99. 试求传动比 iH1。
2 2′
解: 为固定轮(即 轮3为固定轮 即n3=0) 为固定轮
n1 − nH n1 − nH i = = n3 − nH 0− nH
齿轮4对传动比没有影响, 齿轮4对传动比没有影响,但能改变从动 轮的转向,称为过轮或中介轮。 轮的转向,称为过轮或中介轮。
§11—3 周转轮系传动比的计算 一、周转轮系的分类 按周转轮系所具有的自由度数目的不同分类: 按周转轮系所具有的自由度数目的不同分类: 1) 行星轮系
F = 3× 3 − 2 × 3 − 2 = 1
i AB
从 A → B 从动轮齿数的连乘积 = 从 A → B 主动轮齿数的连乘积
二、首、末轮转向的确定 1、用“+” “-”表示
ω1 ω1 1 ω2
1
2
ω2
p
vp
转向相反
2
转向相同
i 12
ω1 = = ω2
z2 − z1 z2 + z1
外啮合 内啮合
对于平面定轴轮系, 对于平面定轴轮系,设轮系中有 m对外啮合齿轮,则末轮转向为(-1) 对外啮合齿轮,则末轮转向为 对外啮合齿轮
关键是先要把其中的周转轮系部分划分出来 。 周转轮系的找法: 周转轮系的找法: 先找出行星轮,然后找出系杆, 先找出行星轮,然后找出系杆,以及与 行星轮相啮合的所有中心轮。 行星轮相啮合的所有中心轮。 每一系杆, 每一系杆,连同系杆上的行星轮和与行星 轮相啮合的中心轮就组成一个周转轮系 在将周转轮系一一找出之后, 在将周转轮系一一找出之后,剩下的便是 定轴轮系部分。 定轴轮系部分。
机械原理典型例题(第七章轮系)
- 50 n H
5
n H 8.33r / min
7-12:所示电动三爪自定心卡盘传动轮系中, 设已知齿数为Z1=6,Z2=Z2’=25,Z3=57, Z4=56。试求:传动比i14。 i14=n1/n4
=i1H/i4H
3 2 2' 4
H 1
1-2-3-H, 行星轮系 n1 nH n1 H i13 1 n3 nH nH z2 z3 57 z1 z2 6
7-14:图示锥齿轮组成的差速器。已知Z1=48, Z2=42,Z2’=18,Z3=21,n1=100r/min, n3=80r/min,转向如图所示。求nH=?
2 1 2' H 3
H i13
n1 n H z z 49 2 3 z1 z 2 48 n3 n H
转化轮系中 n1与n3相 反
2’-3-4-H差动轮系 1-2空间定轴轮系 1’-5’-5-4’空间定轴轮系 联动n1=n1’, n2=n2’, n4=n4’,n5=n5’
Z1 + n1 n1 Z2 1 ZZ 1 5 n1 nH Z 5' Z 4'
n2' nH z4 = 1 n4 nH z2'
H i13
n3 nH i n4 nH
H 34
H 31
行星轮 — Z2,Z2’ 联动关系 — n2=n2’ 系杆 — H 中心轮 — 1,3,4 3K-H型周转轮系
n1 nH n 1 1 n3 nH nH z3 = 5 z1
n3 nH z1 1 i = n1 nH z3 5
2
由同轴条件,正确啮合条件
r3 r1 2r2
机械原理典型例题(第七章轮系)
3
自行车变速器
自行车的变速器是基于齿轮传动原理设计的。
数据分析及计算
通过数据分析和计算,可以更好地了解和优化齿轮传动系统的性能。
胶带传动原理
胶带传动是一种基于摩擦的传动方式,适用于轻载、低转速的传动。
胶带传动设计
胶带传动的设计要考虑传递力、张紧装置和传动比力的计算,可以确定轮胎传递给地面的力。
传动比计算
1 计算方法
传动比等于从动齿轮的齿数除以主动齿轮的齿数。
2 影响因素
齿轮传动的传动比受到齿数、齿轮模数等因素的影响。
3 传动比的重要性
传动比决定了齿轮传动系统的输出速度和扭矩。
齿轮传动的应用
1
机床
齿轮传动广泛应用于机床上,如铣床、车床、刨床等。
2
工程机械
挖掘机、推土机等工程机械中常使用齿轮传动。
机械原理典型例题(第七 章轮系)
本节将讨论机械原理中的轮系。我们将探索它的定义、分类以及在机械传动 和制造中的应用。
齿轮传动
一种效率高的传动方式
齿轮传动以齿轮的啮合为基础,具有高效率和较大的传递力。
常见的齿轮类型
齿轮传动包括直齿轮、斜齿轮、蜗轮蜗杆等不同类型,适用于不同的工程需求。
应用广泛
齿轮传动广泛应用于机械设备、汽车、船舶等领域。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第六章 轮系及其设计计算及分析题1、已知:Z 1=30,Z 2=20,Z 2’=30,Z 3 = 25,Z 4 = 100,求i 1H 。
2、图示轮系,已知各轮齿数Z 1=18,Z 2= Z 4=30,Z 3=78,Z 5=76,试计算传动比i 15。
12 34 5 H3、在图示轮系中,已知各轮齿数为Z 1=Z 3=30,Z 2=90,Z 2’=40,Z 3’=40,Z 4=30,试求传动比i 1H ,并说明I 、H 轴的转向是否相同?4、在图示轮系中,已知各轮齿数为Z 1 =15,Z 2=20, Z 2’ = Z 3’= Z 4=30, Z 3=40,Z 5= 90,试求传动比i 1 H ,并说明H 的转向是否和齿轮1相同? 1I2 2’ 33’4H5、在图示轮系中,已知各轮的齿数为Z 1= 20, Z 2=30,Z 3=80, Z 4=25,Z 5=50,试求传动比i 15。
6、在图示轮系中,已知各轮齿数为Z 1=19,Z 2=76, Z 2’= 40,Z 3=20,Z 4= 80,试求传动比i 1H 。
7、在图示轮系中,已知各轮齿数为Z 1= 20,Z 2’= 25,Z 2= Z 3=30,Z 3’= 20,Z 4=75,试求:(1)轮系的传动比i 1H 。
(2)若n 1=1000r/min ,转臂H 的转速n H =?8、已知图示轮系中各轮的齿数Z 1=20,Z 2=40,Z 3=15,Z 4=60,轮1的转速为n 1=120 r/min ,转向如图。
试 求轮3的转速n 3 的122’ 34 53’ 45 123H1 2 32’ 3’4 H9、在图示轮系中,已知各轮齿数为Z 1= Z 3= Z 4=20,Z 2=40,Z 5= 60, n 1 = 800r/min ,方向如图所示,试求n H 的大小及转向。
10、在图示轮系中,已知各轮齿数为Z 1=16 ,Z 2=24, Z 2’= 20,Z 3=40,Z 3’= 30, Z 4= 20,Z 5=70试求轮系的传动比i 1H 。
11、在图示轮系中,已知各轮齿数为Z 1= 15,Z 2=25,Z 2’= 20,Z 3=60,Z 4=10,Z 5=30,n 1=200r/min ,n 3=50r/min ,试求n 1、n 3转向相反时,n 5=?。
1 23H45 n 1 12 3 H 2’3’451 2 2’34512、在图示轮系中,已知各轮齿数为Z1= 30,Z2=25,Z2’= 20,Z3=75,n1=200r/min,n3=50r/min,试求:(1)n1与n3转向相同时,n H的大小和方向。
(2)n1与n3转向相反时,n H的大小和方向。
13、在图示轮系中,已知各轮齿数为Z1= Z4=20,Z2= Z5=30,Z3= Z6=100,试求传动比i1H。
14、在图示轮系中,已知各轮齿数为Z1= 17,Z2=20,Z3= 85,Z4=18,Z5=24,Z6=21,Z7=63 试求当n1=n4=100r/min,n p=?。
715、在图示轮系中,已知各轮齿数为Z1= 20,Z2=40,Z2’= 20,Z3=30,Z4=80,试求i1H。
16、在图示轮系中,已知各轮齿数为Z 1= 40,Z 2=16,Z 3=20,Z 4=76,Z 5= 40,Z 6=20,n 6=60r/min ,方向如图所示,试求n 1的大小和方向。
17、在图示轮系中,已知各轮齿数为Z 1=15, Z 2=25,Z 2’=20, Z 3=20, Z 4=60,Z 4’= 55, n 1=110r/min ,转向如图所示,试求n H 的大小及转向。
18、某起重装置,其运动简图所图所示,已知各轮齿数为Z 1=Z 2=20,Z 3=60,Z 4=2(蜗杆), Z 5=40,n 1的转向如图所示,试求:(1)i 15的大小;(2)此时重物W 是上升还是下落?19、在图示轮系中,已知各轮齿数为Z 1=20, Z 2=80, Z 3=24, Z 3’=20, Z 4=36, Z 5=40,n 1=1000r/min ,转向如图所示,试求丝杆的转速及转向。
12 345 6 H122’ 344’Hn 120、已知: Z1=20,Z2=100,Z3 = Z4 = 40, Z4’ =41, Z5 =39, 求:i13。
{参考答案}1、(本题共8分)解:1-2为定轴轮系321212-=-=Z Z i (2分) 2’-3-4-H 为行星轮系310'244'24'2-=-=--=Z Z n n n n i H H H (3分) n 2=n 2’,n 4=0313'2=H i(1分) 926'2121-=⋅=H H i i i(2分)2、(本题共8分)解:1-2-3-H 为行星轮系313133113-=-=--=Z Zn n n n i H HH(2分) 5-4-3-H 为行星轮系3839533553==--=Z Z n n n ni H HH(2分) n 3=03161=H i 3815-=H i(2分) 3608/5115-==H H i i i(2分)3、(本题共8分)解:1-2为定轴轮系31212==Z Z i(2分) 2’-3-3’-4-H 为行星轮系169'3'2344'24'2==--=Z Z Z Z n n n ni H HH(2分) n 4=0,n 2= n 2’1672=H i(1分) 16212121==H H i i i(2分) 转向相同。
(1分)4、(本题共8分)解:1-2-2’-3为定轴轮系916'213213==Z Z Z Z i(2分) 3’-4-5-H 为行星轮系3'355'35'3-=-=--=Z Z n n n n i H HH(2分) n 5=0,n 3= n 3’9643131==H H i i i (2分) 转向相同。
(1分)5、(本题共8分)解:4-5为定轴轮系24545-=-=Z Z i (2分) 1-2-3-H 为行星轮系4133113-=-=--=Z Z n n n n i H H H (3分) n 3=0,n 4= n H51=H i(1分) 1045115-==i i i H(2分)6、(本题共8分)解:1-2为定轴轮系41212==Z Zi(2分) 2’-3-4-H 为行星轮系2'244'24'2-=-=--=Z Z n n n ni H HH(3分) n 4=0,n 2= n 2’32=H i(1分) 122121==H H i i i(2分) 7、(本题共8分)解:1-2为定轴轮系231212-=-=Z Z i(1分) 2’-3-3’-4-H 为行星轮系29'3'2344'24'2-=-=--=Z Z ZZ n n n n i H H H(3分) n 4=0,n 2= n 2’2112=H i(1分) 4332121-==H H i i i(2分) n H =n 1/i 1H = -4000/33 r/min(1分) 8、(本题共8分)解:1-2为定轴轮系21212-=-=Z Z i(1分) 3-4-H 为行星轮系4344334-=-=--=Z Z n n n n i H HH(3分) n 4=0,n 2= n H52=H i(1分)5/2/31213-==H i i i (2分) n 3=n 1/i 13= -300 r/min (1分)9、(本题共8分)解:1-2为定轴轮系21212-=-=Z Z i (1分) 3-4-5-H 为行星轮系3355335-=-=--=Z Z n n n n i H H H (2分) N 5=0,n 2= n 342=H i (1分) 82121-==H H i i i (2分) n H =n 1/i 1H = -100 r/min (1分) 与n 1的转向相反。
(1分)10、(本题共8分)解:1-2-2’-3为定轴轮系 31'22312==Z Z Z Z i (2分) 3’-4-5-H 为行星轮系 3/7'355'35'3-=-=--=Z Z n n n n i H H H (3分) n 5=0,n 3= n 3’3/103=H i (1分) 10/3131==H H i i i (2分)11、(本题共8分)解:4-5为定轴轮系34545-=-=Z Z i (2分) 1-2-2’-3-H 为差动轮系51'2233113-=-=--=Z Z Z Z n n n n i H H H (3分) n 1、n 3转向相反,n 1=200r/min ,n 3= -50r/min550200-=---HH n n n H = -25/3r/min (1分) n 5=n 4/i 45=25/9 r/min (2分)12、(本题共8分)解:1-2-2’-3-H 为差动轮系8/251'2233113-=-=--=Z Z Z Z n n n n i H H H (4分) (1)n 1、n 3转向相同,n 1=200r/min ,n 3=50r/min8/2550200-=--HH n n n H = 750/11 r/min (2分)8/2550200-=---HH n n n H = 350/33 r/min (2分)13、(本题共8分)解:1-2-3为定轴轮系51313-=-=Z Z i (2分) 4-5-6--H 为行星轮系5466446-=-=--=Z Z n n n n i H H H (3分) n 6=0,n 4=n 3643==H H i i (1分) 30/3131-==H H i i i(2分) 14、(本题共8分)解:1-2-3为定轴轮系 51313==Z Z in 3= n 1/i 13=20 r/min (2分) 4-5-6-7-H 为行星轮系 446577447-=-=--=Z Z Z Z n n n n i H HH(3分) n H =n 3420201007-=--nn 7=0 (2分) n P =n 7=0(1分) 15、(本题共8分)解:1-2为定轴轮系 21213-=-=Z Z i (2分) 2’-3-4-H 为行星轮系 4'244'24'2-=-=--=Z Z n n n ni H HH (3分) n 4=0,n 2=n 2’5'22==H H i i (1分) 10/3121-==H H i i i(2分) 16、(本题共8分)解:5-6为定轴轮系 2/15656-=-=Z Z i n 5= n 6i 56= -30 r/min (2分) 4-5-6-7-H 为行星轮系 25/3813244114-=-=--=Z Z Z Z n n n n i H HH (3分) n 4=0,n 5= n H25/3830301-=+n n 1= -378/5 r/min (2分) 方向n 6与相反。