1杆系矩阵分析1
第1章 杆系结构的矩阵位移法
在计算图式中,杆单元和梁单元均简化为一条直线,统称为一维单元。
矩阵位移法结构分析的基本要点
矩阵位移法是以传统结构力学的位移法为理论基础,按有限元法的基本思路分
析结构。
(1)单元分析
将结构离散为若干个杆件单元,研究杆件单元的力学特性,确定在单元坐
标系中单元杆端力与杆端位移之间的关系,获得单元坐标系中的单元刚度
第一章 杆系结构的矩阵位移法
§1 概述
§2 总体坐标系和单元坐标系
§3 平面梁单元的单元刚度矩阵
§4 总体坐标系中的单元刚度矩阵
§5 总体刚度矩阵的集成
§6 荷载列阵的形成
§7 方程求解
§8 杆件单元内力计算
§9 支点反力计算及支承点沉陷产生的内力计算
§10 矩阵位移法计算步骤与算例
§1 概述
结构矩阵分析方法:杆系结构的有限元法。
在单元分析中,杆端位移和杆端力都是在单元坐标系定义的。组成结构的各个
单元的单元坐标系不一定完全相同。
通过坐标转换,将各单元坐标系下的单元刚度矩阵和荷载列阵转换到总体坐标
系下的单元刚度矩阵和荷载列阵。
4.1 坐标转换
令总体坐标系中单元杆端力和杆端位移列阵为 和 ,表示为:
将端单元坐标系中的位移分量用总体坐标系中的位移分量表示,其投影关系
于1(其他杆端位移分量均为零)时,所引起的其所在行对应的杆端力分量的数
值。
(3)单元刚度矩阵具有的性质
(4)考虑剪切变形的梁单元刚度矩阵
以上推导的梁单元刚度矩阵适用于细长梁,忽略了剪切变形影响。对于剪切
变形起重要作用的深梁,剪切变形引起梁的附加挠度。
矩形截面k=1.2,
圆形截面k=10/9。
1 球杆系统建模分析
《线性系统理论》课程设计报告书课题名称球杆系统姓名孟禹漆铖刘泽文孟凡强杨佐龙日期2013年2 月25日老师陈玮1 球杆系统建模分析本章将对球杆系统进行简单的介绍,然后采用拉格朗日方程建立其数学模型,并在此基础上分析其特性。
1.1球杆系统介绍球杆系统(Ball & Beam )是由球杆执行系统、控制器和直流电源等部分组成。
该系统对控制系统设计来说是一种理想的实验模型。
正是由于系统的结构相对简单,因此比较容易理解该模型的控制过程。
球杆执行系统(如图1 所示)由一根V 型轨道和一个不锈钢球组成。
V 型槽轨道一侧为不锈钢杆,另一侧为直线位移电阻器。
当球在轨道上滚动时,通过测量不锈钢杆上输出电压可测得球在轨道上的位置。
V 型槽轨道的一端固定,而另一端则由直流电机(DC motor )的经过两级齿轮减速,再通过固定在大齿轮上的连杆带动进行上下往复运动。
V 型槽轨道与水平线的夹角可通过测量大齿轮转动角度和简单的几何计算获得。
这样,通过设计一个反馈控制系统调节直流电机的转动,就可以控制小球在轨道上的位置。
图1 球杆系统执行机构原理图1.2拉格朗日方程介绍建立一个力学体系的动力学方程所需要的独立坐标称为广义坐标,广义坐标一旦确定,体系在空间的位置状态也就可以唯一确定。
广义坐标可以是坐标变量,也可能是是角动量或其他独立变量,凡能用来表述体系的位形、运动和动力学状态的独立参量都可作为广义坐标。
广义坐标的条件是:互相独立、满足约束方程、唯一确定体系的位形式动力学状态。
拉格朗日方程方法建模可以表述为:设一个机械系统的自由度为n ,对于系统可以采用广义坐标12(,,...,)n q q q q =,12(,,...)n q q q q =来描述,记该系统的总体动能为(,)T q q ,总体势能为()V q ,系统的运动特性可以用以下的拉格朗日方程描述:d 1,2,...,d i i iL Li n t q q τ⎛⎫∂∂-== ⎪∂∂⎝⎭ (1.1)其中,方程组中方程式的数目等于质点系的自由度数,i τ为作用在第i 个广义坐标i q 方向的外部力或力矩之和。
杆单元刚度矩阵

杆单元刚度矩阵摘要:一、杆单元刚度矩阵的概念与意义二、杆单元刚度矩阵的计算方法三、杆单元刚度矩阵在工程应用中的实例四、提高杆单元刚度矩阵计算精度的措施五、总结正文:一、杆单元刚度矩阵的概念与意义杆单元刚度矩阵是工程力学中一个重要的概念,它用来描述杆件在外力作用下的形变情况。
刚度矩阵包含了杆件各个方向上的刚度系数,用以表征杆件在不同方向上的抗弯、抗扭、抗剪等性能。
在结构分析和设计中,对杆单元刚度矩阵的研究具有重要的意义。
二、杆单元刚度矩阵的计算方法杆单元刚度矩阵的计算方法主要包括理论推导和实验测定两种。
理论推导是根据杆件的材料性能、截面形状和边界条件来计算刚度矩阵的各项参数;实验测定则是通过在不同载荷条件下测量杆件的变形,从而计算出刚度矩阵。
在实际应用中,通常需要结合这两种方法,以确保计算结果的准确性。
三、杆单元刚度矩阵在工程应用中的实例在工程结构设计中,杆单元刚度矩阵发挥着重要作用。
例如,在建筑结构的抗震设计中,需要根据杆单元刚度矩阵来分析结构的刚度和弹性性能,以确定结构的抗震能力;在机械设备的设计中,杆单元刚度矩阵可用于计算设备的振动特性和动态性能,从而避免设备在运行过程中产生过大的振动,提高设备的使用寿命。
四、提高杆单元刚度矩阵计算精度的措施为了提高杆单元刚度矩阵的计算精度,可以采取以下措施:1.选用准确的计算公式和模型,确保理论推导的可靠性。
2.完善实验设备和方法,提高实验数据的准确性。
3.充分考虑杆件的材料性能、几何尺寸和边界条件等因素,确保计算结果的适用性。
4.采用数值模拟等先进技术,对杆单元刚度矩阵进行修正和优化。
五、总结杆单元刚度矩阵在工程力学领域具有重要的理论和实践意义。
通过对杆单元刚度矩阵的研究,可以更好地了解杆件的力学性能,为工程结构设计和优化提供有力的依据。
第6章-杆系结构的非线性分析

6EI
l2
2EI
l
ES
l
6EI l2
4EI l
第6章
42
0 0
000
0
0 6 5l
1 10
0 6 5l
1 10
0 1 10 2l 15 0 1 10 l 30
[Ks ] N 0 0
000
0
0 6 5l 1 10 0 6 5l 1 10
0 1 10 l 30 0 1 10 2l 15
321
1222 )l 2
3v2 (2
1 )l
18v12
18v22
3v1(12v2
l(2 1))) 14ES (6v1 6v2 l(1 102 )))
第6章
40
6.3 一般方法形成单元刚度矩阵 -U.L列式
[B] [Bo ] [BNv ]
[K] v[B]T [D][B]dV=[Kl ] [Ks ]
第6章 杆系结构的非线性分析
第6章
1
6.1 概述
一.杆系结构非线性分析的关键问题
➢ 非线性单元刚度矩阵的形成; ➢ 非线性方程组的求解; ➢ 结构破坏准则的确定。
第6章
2
二.杆元非线性单元刚度矩阵的形成
1. 描述杆元物理非线性特征的数学模型 ➢ 集中塑性铰模拟
Giberson 单分量模型; Clough 双分量模型; Aoyama 三分量模型。
6EI
l2
2EI
l
ES
l
6EI l2
4EI l
第6章
35
0 0
000
0
0 6 5l
1 10
0 6 5l
1 10
上海交大计算结构力学课件ppt杆系结构有限元01

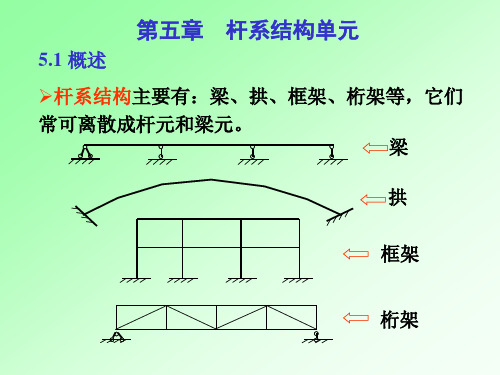
第5章 杆系结构有限元(1)有限元方法是在结构力学中的结构矩阵位移法的基础上发展起来的。
杆系结构:几何形状简单 杆系结构矩阵位移法:(直接有限元法): 杆的力与位移的关系容易求得 几乎包含了有限元的主要思想 (没有位移插值的问题)(2)基于最小势能原理的杆系结构FEM 分析5.1 直杆受轴向力杆的有限元受力特点: 只有轴向力的作用主要的控制方程:几何关系: x ux ε∂=∂应力应变关系: x x uE E xσε∂==∂边界条件: u u = (给定位移)uA E P x ∂⋅=∂ (给定载荷)平衡方程: 22()()x A uAE f x x x σ∂∂==∂∂最小势能原理的描述:200()2LLp EA u dx uf x dx x ∂⎛⎫∏=- ⎪∂⎝⎭⎰⎰直杆的解u 满足上述控制方程等价于u 使得势能p ∏取最小值。
同样的划分单元,并且单元和节点编号 单元编号:1,2,.....e N =节点编号:1,2,...i n =节点的位移和力向量[][][][]i ii i u p P δ==单元节点位移和节点力向量(总体编号)[][]i i e e j j u P p u P δ⎡⎤⎡⎤==⎢⎥⎢⎥⎣⎦⎣⎦单元节点位移和节点力向量(局部编号)[][]1122e e u P p u P δ⎡⎤⎡⎤==⎢⎥⎢⎥⎣⎦⎣⎦以下讨论基于变分原理的有限元。
假定直杆单元内任意一点的位移可以表示为两个节点位移的线性插值。
取单元的局部坐标 11ξ-≤≤ 1212()[(),()][,]Tu N N u u ξξξ= 多个节点参数eu N u ]][[=)1(21)(1ξξ-=N)1(21)(2ξξ+=N)(2c x x l-=ξN 的将单元节点位移和单元内任意一点的位移建立了联系。
这个联系(线性插值)是我们假定的,因此不同的单元,可以采用不同插值模式,也就形成了不同精度的单元。
由势能极小 0pe u ∂∏=∂并注意到 2ld dx ξ=1012()()()()l eT T dN dN EA dN dN K EA dx d dx dx l d d ξξξ+-==⎰⎰101()()2leTTlP N f x dx N f d ξξ+-==⎰⎰可以直接给出刚度矩阵的积分以及等效载荷(均布轴向载荷)列阵的计算类似的三节点单元以及其他更高级的单元。
结构力学11.2 单元刚度矩阵

89
结构力学讲稿
uie
u
e j
EA
k
e
l 0
0 0
EA l 0
FNei 0 FSei 0 FNej
FSej
EA
l 0
0 0
EA
l 0
0 0
桁架单元的单刚也是对称的和奇异的。
第十一章 矩阵位移法
90
e
]
0 EA
l
0
0
0
12EI l3 6EI l2
0
12EI l3
6EI l2
0
6EI l2 4EI l
0
6EI l2
2EI l
EA l 0
0 12EI
l3
0
6EI
l2
0 EA
6EI l2
0
2EI
l
,称为,单元刚度矩阵,简称“单刚”。
FFSNeeii
uviiee
{F
e}
M
e i
FNej
,称为,单元杆端力列向量。{
e}
ie
u
e j
,称为,单元杆端位移列向量。
FSej
v
e j
M
e j
e j
EA
l
0
[k
第十一章 矩阵位移法
{F e} [k e ]{ e} 这意味着:1) 给定杆端位移,可唯一确定出相应的杆端力;2) 给定杆端力,不能唯一确定出杆
杆系结构单元解析
(5) 等效节点力
(x j x)
1
{Fp}e
xj xi
1 l
0 (xi
x)
pdx
pl 0 2 1
0
0
(6) 局部坐标单元刚度矩阵
静力等效 (5-16)
对于等截面铰接杆单元,
1 0 1 0
[k ]e
EA
0
0
0
0
l 1 0 1 0
0
0
0
0
[k ]e
EA 1 l 1
1
l
(4)应力矩阵
[S] E [1 0 0 1 0 0] l
(5-12)
单元上作用分布力px,则等效节点力计算公式仍
为以下形式
{F}e
T
[N ] pxdx
当分布力集度px为常数时,有
{Fpx }e
x xi
j
1 ( l
x(xj ixx))
px
dx
pxl 2
1 1
(5-13)
[N] [Ni
N
j
]
1[(x l
j
x)
(xi x)]
例5-1 一维拉杆
7 l 2
u2 8 E
15 l 2
u3 8 E
19 l 2
u4 8元应力 E
➢单元应变 N A
(1) u2 u1 7 l 2
l 8E
(2) u3 u2 l 2
l
E
(3) u4 u3 1 l 2
l 2E
2、平面桁架杆单元(2D LINK1)➢标看下成的局拉部压坐杆
① 位移模式
因为只有2个结点,每个结点位移只有1个自由度, 因此单元的位移模式可设为:
船舶结构力学-4_1杆系结构分析的力法

上次课小结⏹挠曲面选取(根据位移边界参考梁挠曲线基函数形式)⏹应变能计算(考虑所有可变形构件,加强筋,弹性约束)➢板四边挠度为零时,板的应变能⏹力位能计算⏹总位能计算⏹由总位能取极值求待定系数222222D w w V dxdy x y ⎛⎫∂∂=+ ⎪∂∂⎝⎭⎰⎰()22222222222212D w w w w w V dxdy x y x y x y μ⎧⎫⎡⎤⎛⎫⎛⎫∂∂∂∂∂⎪⎪=++--⎢⎥⎨⎬ ⎪ ⎪∂∂∂∂∂∂⎢⎥⎝⎭⎝⎭⎪⎪⎣⎦⎩⎭⎰⎰横荷重q P ()(),,U q x y w x y dxdy =⎰⎰U Pw=)22222222221V U D w w w w μ∏=-⎧⎧⎡⎛⎫⎛⎫∂∂∂∂⎪⎪=++--⎢⎨⎨ ⎪ ⎪⎰⎰0,1,2,3...;1,2,3...mn m n A ∂∏===∂第四章杆系结构分析的力法及位移法⏹4-1 力法⏹4-2 位移法4-1力法⏹4-1-1 力法的原理⏹4-1-2 简单刚架与简单板架计算⏹4-1-3 弹性固定端与弹性支座的实际概念⏹4-1-4 弹性支座上连续梁求解⏹4-1-5实际应用与例子4-1-1 力法的原理⏹力法是解杆系的基本方法之一→位移法⏹力法适于求解超静定(静不定)结构基本概念()()43522038448q l R l EI EI-=方法一方法二列1点挠度为零的表达式列1点转角连续的表达式331012324324Ml ql Ml ql EI EI EI EI θθ=-=-+=基本概念⏹力法基本结构为静定结构,以力为未知数,列变形连续方程进行求解⏹所列变形连续方程与解除的多余约束对应⏹对于连续梁,三弯矩方程式求解更方便刚性支座上连续梁计算(一般情形)列支座挠度为零的表达式:力法正则方程式⏹柔度系数d ij为X j处单位力引起相应于X i处的位移;d ij X j为X j引起相应于X i处的位移⏹d ij=d ji→正则方程式⏹d ii>0⏹柔度矩阵正定刚性支座上连续梁计算(一般情形,三弯矩方程式)列支座i转角连续的表达式:()()11111116336i i i i i i i i i i i i i i i i M l M l M l M l q q EI EI EI EI θθ-++++++++=--+故上式包括3个未知弯矩:M i-1,M i ,M i+1力法求解步骤⏹解除多余约束,代以未知反力→静定结构(基本结构)⏹列变形连续方程⏹解方程求未知力,进而求弯曲要素。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
!-----------------------读入单元特性参数,本程序为轴向刚度 EA -------------READ (10,*) prop; etype=1 !-----------------------如果单元属性多于一类,读入单元属性类型向量 --------IF (np_types > 1) READ (10,*) etype !-----------------------读入单元长度 --------------------------------------READ (10,*) ell; nf=1 !-----------------------读入约束信息 --------------------------------------READ (10,*) nr,(k,nf(:,k),i=1,nr); CALL formnf(nf); neq=MAXVAL(nf) ALLOCATE (kdiag(neq),loads(0:neq)) !-----------------------对单元循环,寻找整体数组尺寸-----------------------kdiag=0 elements_1: DO iel=1,nels; num=(/iel,iel+1/) CALL num_to_g(num,nf,g); g_g(:,iel)=g; CALL fkdiag(kdiag,g) END DO elements_1 DO i=2,neq; kdiag(i)=kdiag(i)+kdiag(i-1); END DO ALLOCATE (kv(kdiag(neq)))
PROGRAM p41 USE main ! 模块中必须包含如下的一些子程序,以便主程序应用 ! formnf 形成结点自由度向量 nf ! num_to_g 从 num 和 nf 找得 g 向量 num 单元结点号向量,nf 结点自由 ! 度向量,g 定位向量 ! fkdiag 计算一维存储主对角线元素位置信息 g 单元定位向量,kdiag 一 ! 维存储对角线元素位置向量 ! rod_km 形成一维杆单元刚度矩阵 km 单元刚度矩阵,ea 弹性属性向 ! 量,length 单元长度向量 ! fsparv 将单元刚度集装到对称一维存储总刚度矩阵 g 定位向量,kdiag ! 一维存储对角线元素位置向量,km 单元刚度矩阵,kv 一维存储 ! 总刚度矩阵 ! sparin 对对称一维总刚矩阵执行 Cholesky 因式分解 kv 一维存储总刚度 ! 矩阵,kdiag 一维存储对角线元素位置向量 ! spabac 对对称一维总刚矩阵执行 Cholesky 前向替换和回代
矩阵位移法的复习和扩展
矩阵位移法复习 简单杆件程序及应用 自学相关程序
矩阵位移法
有限元法除单元分析(刚度方程建立)外整 理论基础——结构力学; 个思想方法与矩阵位移法是一样的,特别是 数学基础——矩阵分析; 从定位向量集装开始完全一样!这也就是应 计算手段——计算机程序。 该复习的原因。 理论上没有新内容,从方法上强调采用 矩阵表达,建立结构的位移法基本方程, 以计算机为工具进行结构分析。 • 要点:离散化、单元分析、集成总装、 整体结构基于位移法基本方程求解
IF (fixed_freedoms /= 0) THEN ALLOCATE (node(fixed_freedoms), & no(fixed_freedoms),value(fixed_freedoms)) !-----------------------读入给定位移信息 ----------------------------------READ (10,*) (node(i),value(i),i=1,fixed_freedoms) DO i=1,fixed_freedoms; no(i)=nf(1,node(i)); END DO !------------------------ 进行乘大数处理 -----------------------------------kv(kdiag(no))=kv(kdiag(no))*penalty ! 乘大数 loads(no)=kv(kdiag(no))*value END IF !-----------------------equation solution - 方程求解 ----------------------CALL sparin(kv,kdiag) CALL spabac(kv,loads,kdiag) loads(0)=zero WRITE (11,'(/A)') " 结点 位移"
局部坐标单元分析
总的原则是叠加法
例如
δ3
δ2 δ1 δ6
q(x)
δ4
δ5
还记得如何写出单元刚下分量间的关系
例如
y
δ2
y x
α δ1 δ1 x
δ2
能写出两分量之间的关系吗?
定位集装
在单元、结点编号基础上,再进 行位移编号 例如
7 ⑨ (10,11,12) ⑥ 4 ④ (1,2,3) ① 1 8 ⑩ (13,14,15) ⑦ 5 ⑤ (4,5,6) ② 2
DO k=1,nn; WRITE (11,'(I5,2E12.4)') k,loads(nf(:,k)); END DO !-----------------------retrieve element end actions- 计算输出单元杆端作用 WRITE (11,'(/A)') " 单元 起始端 终止端 " elements_3: DO iel=1,nels CALL rod_km(km,prop(1,etype(iel)),ell(iel)); g=g_g(:,iel) eld=loads(g); action=MATMUL(km,eld) WRITE (11,'(I5,2E12.4)') iel,action END DO elements_3 STOP END PROGRAM p41
WRITE (11,'(2(A,I5))') & " 总共有",neq," 个方程、一维存储的元素总数量为 ",kdiag(neq) !-----------------------整体刚度矩阵集装-----------------------------------kv=zero elements_2: DO iel=1,nels CALL rod_km(km,prop(1,etype(iel)),ell(iel)); g=g_g(:,iel) CALL fsparv(kv,km,g,kdiag) END DO elements_2 !-----------------------读入荷载 和/或 位移--------------------------------loads=zero !-----------------------读入荷载信息 --------------------------------------READ (10,*) loaded_nodes,(k,loads(nf(:,k)),i=1,loaded_nodes) !-----------------------读入给定位移自由度数 ------------------------------READ (10,*) fixed_freedoms
能说出如何将单元的元素进行集装吗?
解方程与后处理
• 根据所采用的集装策略(方阵、等带宽、 一维变带宽等)进行集装,完成后视情况 进行边界条件处理,再调用对应的解法 • 解得结构结点位移后,根据定位向量形 成单元整体位移向量,计算单元杆端力 • 求单元任意截面的位移和内力以备作图 • 绘制结构的变形和内力图,需要的话还 可进一步做设计、验算等工作
简单杆件程序及应用
• 主程序介绍 • 输入数据文件建立 • 程序运行结果
! 程序 4.1 用 2 结点杆单元轴向荷载作用弹性杆的一维分析 ! 整型变量说明: ! fixed_freedoms = 给定位移自由度数,loaded_nodes = 受荷结点数 ! ndof = 每单元的自由度数,nels = 单元数,neq = 总自由度数(方程个 ! 数), nod = 单元结点数,nodof =每结点自由度数,nn = 结点数 ! nprops = 材料(弹性特性)参数个数,np_types = 不同的材料类型数 ! 目,nr = 约束结点数 ! 整型数组说明: ! etype = 单元属性类型向量,g = 单元定位向量,g_g = 总单元定位向量 ! kdiag = 一维存储对角线元素位置向量,nf = 结点自由度向量 ! no = 给定位移的自由度号向量,node = 给定位移的点号向量,num = ! 单元结点号向量 ! 实型数组说明: ! action = 单元结点的荷载响应向量,eld = 单元位移向量,ell = 单元长 ! 度向量, km = 单元刚度矩阵,kv = 整体刚度矩阵,loads = 总荷载向量 ! prop = 单元轴向刚度 EA 矩阵,value = 给定的位移向量
IMPLICIT NONE INTEGER,PARAMETER :: iwp=SELECTED_REAL_KIND(15) ! 返回 iwp = 8,也 ! 即双精度 INTEGER :: fixed_freedoms,i,iel,k,loaded_nodes,ndof=2,nels,neq,nod=2, & nodof=1,nn,nprops=1,np_types,nr REAL(iwp) :: penalty=1.0e20_iwp,zero=0.0_iwp ! 大数,零 !-----------------------dynamic arrays- 动态数组 --------------------------INTEGER,ALLOCATABLE :: etype(:),g(:),g_g(:,:),kdiag(:),nf(:,:),no(:), & node(:),num(:) REAL(iwp),ALLOCATABLE :: action(:),eld(:),ell(:),km(:,:),kv(:),loads(:), & prop(:,:),value(:) !-----------------------input and initialisation- 输入和初始化 ------------OPEN (10,FILE=‘p41_1.dat’) ! 打开输入数据文件 OPEN (11,FILE=‘p41_1.res’) ! 打开输出数据文件 !-----------------------读入单元数及不同的材料类型数目 --------------------READ (10,*) nels,np_types nn=nels+1 ALLOCATE (g(ndof),num(nod),nf(nodof,nn),etype(nels),ell(nels),eld(ndof), & km(ndof,ndof),action(ndof),g_g(ndof,nels),prop(nprops,np_types))