捷联式惯导系统误差解析解研究
捷联惯导零速修正技术中姿态误差反馈方法的比较研究

基于MEMS捷联惯导系统的解算与误差修正方法
基于MEMS捷联惯导系统的解算与误差修正方法
贺元军;卢晓东;吕春红
【摘要】由于微机械惯性器件(MEMS)捷联惯导系统的惯组误差和漂移较大,加之弹体动态性能较高,因此在较短的时间内也会由于器件误差积累和模型算法误差引起很大的导航偏差;针对传统线性拟合方法对惯组建模时无法适应高动态弹体运动的不足,提出了一种基于当前统计模型的惯组运动模型滤波方法,其通过对运动状态的有限转移建模可以较好地描述飞行器的高机动方式;此外采用了时间序列分析方法对惯组的误差和漂移进行了参数估计;最后通过仿真实验证明,采用当前统计滤波模型和时间序列分析方法进行MEMS捷联惯导系统解算结果要优于传统的线性拟合滤波方法.
【期刊名称】《计算机测量与控制》
【年(卷),期】2010(018)006
【总页数】3页(P1364-1366)
【关键词】微机械惯性器件;捷联惯导;当前统计模型;时间序列分析
【作者】贺元军;卢晓东;吕春红
【作者单位】西北工业大学航天学院,陕西,西安,710072;成都市经济技术开发区博士后科研工作站,四川,成都,610100;四川航天技术研究院,四川,成都,610100;西北工业大学航天学院,陕西,西安,710072;西北工业大学航天学院,陕西,西安,710072【正文语种】中文
【中图分类】V241.5。
旋转调制式捷联惯导系统误差分析及仿真

关 键词 : 旋 转调 制 捷 联 惯导
0 引 言
基本 原理
仿真提 高 长 时 间工 作 惯 导系 统
类似 , 只是多了一步参考 系的坐标变换。其原理示 意 图如 图所 示 :
定位精度是惯性导航领域重要的研究课题。提高惯 导系统定位精度一般有两种方法: 一是提高制造工 艺, 研制高精度新型惯性敏感元件 ( I M U ) , 但系统成 本较高 ; - - 是通过合理的系统编排 , 采用误差补偿 的 方式提高惯导系统精度 , 这种方法可 以以较小 的成 本投入获得较大的精度提高 。捷联惯导旋转调制技 术 就是 将现 有 精 度 I MU 固定 在 旋 转 机 构 上 控 制 其
目前 国内外普 遍采用 的双 轴间歇 转位旋转方 案
其中 ∞ 为 陀 螺 仪 的 实 际 角 速 度输 出 ; 占 、 分
别为陀螺仪的常值漂移和随机漂移误差 ; ( a ( i : Y , z )陀螺 的刻度 系数误 差 ; ( 6 G ( = , Y , )为 3 个 陀螺仪 的安装误 差角 。 i 和6 , 4 ( i= , y , z ) 分别 为加 速度计 的刻度 系数误 差 和安装误 差 角 。 △ A和 n 。
转调制 、 双轴 间歇 转 位旋 转 调 制 和双 轴 连 续旋 转 调 制, 并 分别 在静态 、 动态 两种 情况 下对 各方 案进行 了 误差 曲线仿 真 。通过 对 比分 析 得 出了一 些 结 论 , 为
系, 初始时刻s 系与 b 系重合 , s 系随着旋转机构的转 动保持正交旋转。 未进行旋转调制时捷联惯导系统误差传播方程
的抑制 , 是在现有元件水平不变的情况下提 高系统精度的有效方法。对于不同的误差项, 旋转 补偿技 术 具有不 同的调制 效 果。针 对 目前较 为常见 的 三种 旋 转调 制 方 案 , 对被 调 制后 的误 差 公 式进 行 了推 导 和分 析 , 给 出 了各旋 转调 制方 案的调 制机理 , 最后 通过 计 算机仿 真验证 了分析
弹载捷联惯导系统的圆锥误差分析
3 24 部 队 9 .9 9 1 2分队 ,辽宁 葫芦 岛 15 0 200
摘 要 分析 了导弹在高动态环境下捷联惯导系统 圆锥误差形成 因素及原 因,从理论上对各种
因素 进行 了误 差 的定 量 推理 与对 比 ,指 出不 能正确 感 测运 载体 的角运 动和 姿态 更新 率过 低是 引起 圆锥
维普资讯
・
论 文与报告 ・
《 战术导弹控制 技 术》
20 06年 No1总 5 期 ) . ( 2
弹载捷联惯导 系统 的圆锥误差分析
张绪春 1 李瑞亮 , 3 周纯杰
4 04 70 7
1 .华 中科技 大学控 制 系,湖 北武汉
2 24 .9 8 0部 队 1 分 队 .山 东胶 南 1
理 速率 的 限制 以及惯 性 器件 本 身存 在 的误 差 等 因
中 ,由于惯性仪表直接安装在导弹上 。导弹的动
态 环 境 .即导 弹 的角 运动 和线 运 动直 接影 响 惯性 仪 表 的精 度 。在平 台惯 性 仪表 中 ,陀 螺仪 安 装在 平 台上 .由于 平 台对 导 弹角速 度 的 隔离作 用 .使
导 弹 的 角运 动 对 惯性 仪 表 基 本 没有 影 响 , 因此 .
素 ,使 捷联 惯导 系 统 的数 学 平 台不 能完 全 隔 离运 载 体 的角运 动 。发 动机 的振 动影 响 、空 气 动力 扰
张绪春 : 17 (9 4年~ 。 , ) 男 辽宁省葫芦 岛市 9 9 1 队 9 24 部 2分 队工 程师 。 从事导弹 制导 与控制研究工作 。
Ab t a t I i a ay e h th w te c nn r r o I n hg y a c e vrn n c us o sr c : t s n lzd ta o h o i g er f S NS i ih d n mi n i me t O c r.S me o o i otn a tr ta if e c h o ig e rr r o ae .I on s o t t a h ro e sn f mp r t fcos h t n u n e te c n n ro ae c mp r d t i t u h t t e er r s n ig o a l p c nn t n a d lw mtu e u d n ae ae t e mo ti otn a tro h o ig err. o ig moi n o i d p mig rt r h s mp r tfco ft e c nn ros o t a
基于单轴旋转的光纤捷联惯导系统误差特性与实验分析

第31卷第4期2010年4月 宇 航 学 报Journal of AstronauticsV ol.31April N o.42010基于单轴旋转的光纤捷联惯导系统误差特性与实验分析孙 枫,孙 伟(哈尔滨工程大学自动化学院,哈尔滨150001) 摘 要:针对惯性器件偏差是影响惯导系统导航精度的主要因素,同时考虑到多种误差源对调制型捷联系统的影响,提出了一种利用惯性测量单元(I M U )四位置转停的误差调制方法。
分析了调制型捷联系统的误差特性并建立了四位置转位方案模型。
利用实验室自行研制的光纤捷联惯导系统分别进行I M U 静止和四位置转位运动下的长时间导航实验,实验结果表明了该方法的有效性。
关键词:捷联惯导系统;单轴旋转;误差特性;光纤陀螺;定位误差中图分类号:U666.12 文献标识码:A 文章编号:100021328(2010)0421070208DOI :10.3873Πj.issn.100021328.2010.04.021收稿日期:2009202216; 修回日期:2009212215基金项目:国家自然科学基金(60834005,60775001)0 引言旋转调制型捷联惯导系统中采用的是误差自校正方法[1-2],它可以在不使用外部信息的条件下,通过I MU 的转动调制惯性器件的常值偏差,达到误差补偿的目的。
美国早在20世纪70年代开始此类系统的研究,先后研制出MK 39M od3C 、MK 49、AN/WS N -7A 和AN/WS N -7B[3-6]等高精度惯导系统并得到广泛应用。
国内几家单位在不同程度上开展着旋转捷联系统的研发工作,例如国防科技大学、北京时代电子、北京航空航天大学、天津航海仪器研究所和哈尔滨工程大学等。
考虑到实际工程应用中调制型捷联系统[7]的可靠性及多种误差源对系统导航精度的影响,本文提出了一种基于I MU 单轴四位置转停的误差调制方案。
并采用SG T -3型惯性测试转台及实验室自行研制的光纤捷联惯导系统建立实验环境,进行了多次长时间导航实验。
捷联惯性导航系统动静态误差特性分析研究

捷联惯性导航系统动静态误差特性分析研究
捷联惯性导航系统动静态误差特性分析研究
捷联惯性导航系统动静态误差特性是基于惯性的组合导航系统的主要误差来源.为此,根据捷联惯性导航系统的.误差状态方程,本文分析了不同动静态情况下的捷联惯导系统的误差漂移特性.针对静基座和动基座的不同特点,分别采用了特征根和基于数值仿真分析的方法,并建立了相应的误差特性分析模型.重点研究了陀螺常值漂移、加速度计零位偏置和随机性误差对惯性导航系统误差漂移特性的影响;全面分析验证了惯性导航系统的动静态误差特性.本文的研究工作将为惯性组合导航系统误差分析建模提供了有益的参考.
作者:郭俊熊智刘建业黄磊 GUO Jun XIONG Zhi LIU Jian-ye HUANG Lei 作者单位:南京航空航天大学导航研究中心,南京,210016 刊名:航空电子技术英文刊名:AVIONICS TECHNOLOGY 年,卷(期): 2008 39(2) 分类号: V249.32 关键词:捷联惯性导航系统动静态误差特性国仿真。
惯导系统转位条件下的误差特性分析
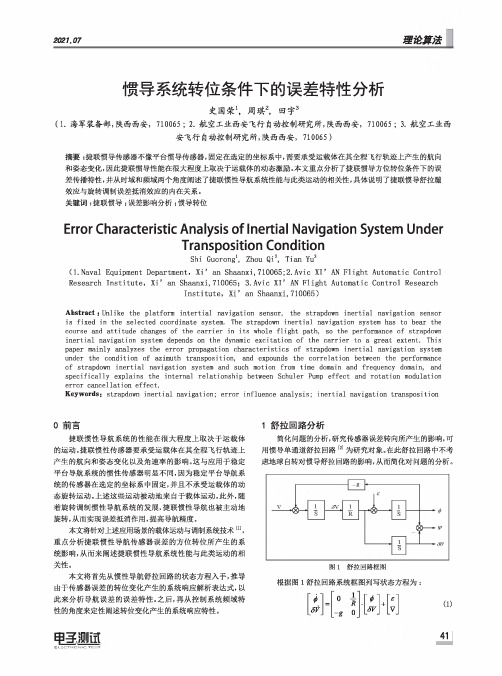
惯导系统转位条件下的误差特性分析史国荣1,周琪2,田宇彳(1.海军装备部,陕西西安,710065; 2.航空工业西安飞行自动控制研究所,陕西西安,710065; 3.航空工业西安飞行自动控制研究所,陕西西安,710065)摘要:捷联惯导传感器不像平台惯导传感器,固定在选定的坐标系中,需要承受运载体在其全程飞行轨迹上产生的航向和姿态变化,因此捷联惯导性能在很大程度上取决于运载体的动态激励。
本文重点分析了捷联惯导方位转位条件下的误差传播特性,并从时域和频域两个角度阐述了捷联惯性导航系统性能与此类运动的相关性,具体说明了捷联惯导舒拉蹦效应与旋转调制误差抵消效应的内在关系。
关键词:捷联惯导;误差影响分析;惯导转位Error Characteristic Analysis of Inertial Navigation System UnderTransposition ConditionShi Guorong1,Zhou Qi2,Tian Yu3(1.Naval Equipment Department,Xi'an Shaanxi,710065;2.Avic XI’AN Flight Automatic ControlResearch Institute,Xi'an Shaanxi,710065; 3.Avic XI'AN Flight Automatic Control ResearchInstitute,Xi'an Shaanxi,710065)Abstract:Unlike the pla t form irrtertial naviga t ion sensor,the st r apdown iner t ial naviga t ion sensor is fixed in the selected coordinate system.The strapdown inertial navigation system has to bear the course and attitude changes of the carrier in its whole flight path,so the performance of strapdown inertial navigation system depends on the dynamic excita/tion of the carrier to a great extent.This paper mainly analyzes the error propagation characteristics of strapdown inertial navigation system under the condition of azimuth transposition,and expounds the correlation between the performance of strapdown inertial navigation system and such motion from time domain and frequency domain,and specifically explains the internal relationship between Schuler Pump effect and rotation moduletion error cancellation effect.Keywords;strapdown inertial navigation;error influence analysis;inertial navigation transpositiono前言捷联惯性导航系统的性能在很大程度上取决于运载体的运动。
船用捷联惯导系统解析粗对准的误差分析
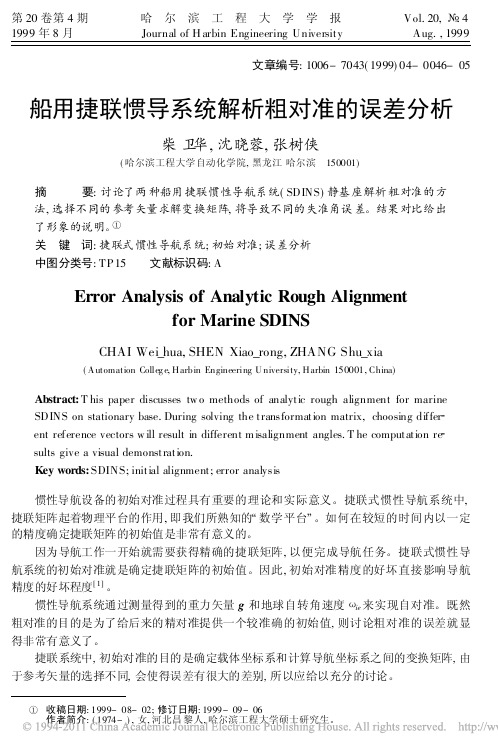
文章编号:1006-7043(1999)04-0046-05船用捷联惯导系统解析粗对准的误差分析柴卫华,沈晓蓉,张树侠(哈尔滨工程大学自动化学院,黑龙江哈尔滨 150001)摘 要:讨论了两种船用捷联惯性导航系统(SDINS)静基座解析粗对准的方法,选择不同的参考矢量求解变换矩阵,将导致不同的失准角误差。
结果对比给出了形象的说明。
关 键 词:捷联式惯性导航系统;初始对准;误差分析中图分类号:TP15 文献标识码:AError Analysis of Analytic Rough Alignmentfor Marine SDINSCHAI Wei_hua,SHEN Xiao_rong,ZHANG Shu_xia(A utomation Colleg e,Harbin Engineering U niversity,Harbin 150001,China)Abstract:T his paper discusses tw o methods of analytic rough alignment for marine SDINS on stationary base.During solving the transformation matrix,choosing differ ent reference vectors w ill result in different m isalignment angles.T he computation re sults give a visual demonstration.Key words:SDINS;initial alignment;error analysis惯性导航设备的初始对准过程具有重要的理论和实际意义。
捷联式惯性导航系统中,捷联矩阵起着物理平台的作用,即我们所熟知的 数学平台 。
如何在较短的时间内以一定的精度确定捷联矩阵的初始值是非常有意义的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
sinφ
+
Ve R
tanφ
F ( 1, 3)
=
-
ω ie
co
sφ
-
Ve R
F ( 1, 5) = 1 R
F ( 1, 9)
=-
Vn R2
F ( 2, 1)
=
-
ω ie
sinφ
-
Ve tanφ R
F ( 2, 3) = - Vn R
F ( 2, 4) = - 1 R
F ( 2, 7)
=
ω ie
sinφ
F ( 4, 4)
=
1 R
(Vn tanφ -
Vu )
F ( 4, 5)
=
2ωie
sinφ
+
Ve R
tanφ
F ( 4, 6)
=-
2ωie co sφ -
Ve R
F ( 4, 7)
= 2ωie (Vn co sφ + Vu sinφ)
+
R
VeVn ( co sφ)
2
F ( 4, 9)
=-
Ve R2
(Vn
- cospsinr
sinp
co spco sr
(4)
δBLg
=
[δB
e g
,δB
n g
,δB
u g
]
T
,δB
L a
=
[δB
e a
,δBma
,δB
u a
]T分别为陀螺
漂移和加速度计零偏在 L 系中的投影 ;
系统误差状态转移矩阵 F ( t) 为 9阶方阵 ,其不为零分量
为:
F ( 1, 2)
=
ω ie
第 22卷 第 11期 文章编号 : 1006 - 9348 ( 2005) 11 - 0042 - 04
计 算 机 仿 真
捷联式惯导系统误差解析解研究
2005年 11月
张 宾 ,刘藻珍
(北京理工大学机电工程学院 , 北京 100081)
摘要 :该文在一定的假设条件下利用捷联惯导系统的三维误差状态模型求解出了单通道误差状态方程的解析解 ,列表给出 了各误差源对于某一特定误差状态的动态影响 。然后利用某型导弹的弹道数据通过对两种误差模型在同一条件下进行仿 真的方法验证了单通道误差状态方程解析解的正确性 。单通道误差模型对分析各种误差源对系统的影响 ,确定在满足系统 精度要求的条件下主要误差源的选择范围 ,进行系统精度分配提供了十分方便直观的方法 。 关键词 :捷联 ;误差模型 ;误差分析 中图分类号 : V249. 32 文献标识码 : A
3 单通道误差传播模型
对于北通道 ,由式 ( 2) ,得
<e
F ( 1, 1) F ( 1, 3) F ( 1, 5) <e
δB
e g
<u = F ( 3, 1) F ( 3, 3) F ( 3, 5)
<u
+
δB
u g
δV n
F ( 5, 1) F ( 5, 3) F ( 5, 5) δVn
δB
n a
当地水平坐标系中相应于误差状态向量δXL 的状态方程
为:
·
δXL ( t) = F ( t)δXL ( t) +δBL ( t)
(2)
式中
δBL ( t)
=
[δBLg
,δB
L a
+ΔgL
+ RLb Kfb , 0 ]T
由于加速度计刻度因子误差和重力扰动矢量很小 , 不考
虑 ,则上式可化为 :
δBL ( t)
gΛ
ωt
- sin (ωt) ω2
<u0
gΛ<u0
t3 6
t- g R
ωt - sin (ωt) ω3
δV n0 δV n0
-
gΛ ω2
1
-
co s (ωt) ω2
-
1 t2 2
0
1
0
1 1 - cos(ωt)
R
ω2
Λ 1 - sin (ωt)
R
ω3
t-
g R
ωt - sin(ωt) ω3
1 ω2
g R
1 - cos(ωt) ω2
+
1 Λ2t2 2
0
0
1
其中 ω =
Λ2
+
g ,Λ R
=
ω ie
co sφ
+
Ve R
( 11)
= 1 , F ( 7, 9) R
=-
Vn R2
=
R
1 co
sφ,
F
( 8,
7)
=
Ve tanφ R co sφ
F ( 8, 9)
=-
R
2
Ve co
sφ,
F ( 9.
6)
=1
其中 R = Re + h, Re = 6378137 (W GS - 84坐标系 ) 为地 球半径 , h为导弹的飞行高度 。
co s (ωt)
-Λ
sin (ωt) ω
Λ sin (ωt) ω
1 - Λ2
1 - cos(ωt) ω2
-g
sin (ωt) ω
gΛ
1 - cos(ωt) ω2
-g
1 - cos(ωt) ω2
gΛ
ωt - sin (ωt) ω3
0
0
0
0
0
0
sin (ωt) Rω
Λ 1 - cos(ωt)
R
ω2
1- g
tanφ
-
Vu )
F ( 5, 1) = - fu , F ( 5, 3) = fe
F ( 5, 4)
=-
2
ω ie
sinφ
+
Ve R
tanφ
F ( 5, 5) = - Vu , F ( 5, 6) = - Vn
R
R
F ( 5, 7)
= - Ve
2ωie
co sφ
+
R
(
Ve co sφ)
2
F ( 5, 9)
ABSTRACT: In this paper, error state model of strapdown inertial navigation system ( SINS) is educed and analytic solution to monochannel error state equation is worked out under the condition of certain hypotheses. The lists of the effect of each error source to a given error status are p rovided when SINS is in the state of moving. The correctness of analytic solution to monochannel error state equation is validated by the means of two error models’ simulation excerp2 ting the same actual trajectory data of a certain type m issile. Monochannel error model gives a convenient and intu2 itionistic way to analyze the effect of all kinds of error sources to the system , delim it the selective range of main error source which can meet the requirement of the system accuracy and allot system accuracy. KEYW O RD S: Strapdown; Error model; Error analysis
1 - cos(ωt) Rω2
t- g R
ωt - sin (ωt) ω3
0
0
0
0
sin (ωt) ω
0
Λ 1 - cos(ωt) ω2
0
-g
1 - cos(ωt) ω2
1
-
g
ωt - sin (ωt) ω3
0
1
0
0
0
0
-Λ
1 - cos(ωt) ω2
- Λ2
1 - sin (ωt) ω3
-t
gΛ
ωt - sin (ωt) ω3
各误差项对于中程和短程导弹位置误差的影响列于表
1。 表 1 各误差项对于中程和短程导弹位置误差的影响
误差源
东向姿态误差 <e0 天顶方向
姿态误差 <u0 北向速度误差 δV n0 北向位置误差 δxn0
误差项 东向位置误差 δxn 中程
短程
-g
1 - co s(ωt) ω2
<e0
- g<e0
t2 2
=
[δB
L g
,δB
L a
,
0
]T
(3)
其中
δB
L g
=
RLbδB
b g
,δB
L a
=
RLbδB
b a
,
cosrcosy - sinrsiny sinp - sinycosp cosy sinr + sinysinpcosr