捷联惯导系统误差系数动态标定方法探究
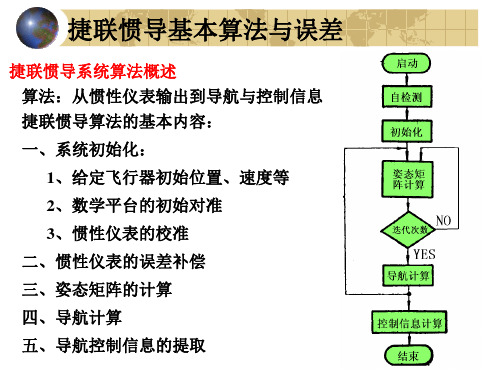
捷联惯导基本算法与误差
姿态计算 矩阵方程精确解1
二、方向余弦矩阵微分方程及其解 C C
E C E b C b b Eb
其中
b Eb
0 z y
z 0
x
y x
0
导航计算可以得到 E IE
b E E 有 b C C iE E iE b
E b E b
E C E b E C E (解 C b b ib iE b
的第一项)
增量算法 矩阵方程CS参数
sin 0 1 cos 0 b b 2 C (t t ) C (t ) I ib ( ib ) 2 0 0 展开合并上式,得 CbE (t t ) CbE (t )
姿态计算 姿态航向角计算1
四、姿态和航向角的计算 根据载体和地理坐标系之间的方向余弦矩阵可确定姿态、航向角
cos cos b CE cos sin sin sin cos cos sin cos sin sin sin cos sin sin sin cos cos sin sin cos cos sin sin cos sin cos cos
E b E b
n 1 n
b b b 02 ( EbX ) 2 ( EbY ) 2 ( EbZ )2
b Eb
方向不变时的精确解
九个微分方程求解,计算量大
姿态计算 四元数精确解1
三、四元数微分方程式及其解 由第一章,四元数微分方程式:
b q q
对
b 的处理类似上一节
一、角增量算法 角增量:陀螺仪数字脉冲输出,每个脉冲代表一个角增量 一个采样周期内,陀螺输出脉冲数对应的角增量为:
激光陀螺捷联惯导系统元件误差自标定技术
Ab t a t Th i o h sp p ri o a s r h i g l s r g r t a d wn i e t l a i a i n s s e ’ s r c : e am ft i a e s t s u e t e rn a e y o s r p o r i v g to y t m S n a n
文章 编 号 :0 2 0 4 ( 0 6 1 — 0 5 0 1 0— 60 2 0 )10 1 —3
激 光 陀螺捷 联 惯 导 系统 元 件误 差 自标 定 技 术
吉翠萍 雷宏杰。 陈 璞。 郭 创。 , , ,
(.西 北 工 业 大 学 , 西 西 安 1 陕 7 0 7 ;.飞行 自动 控 制 研 究 所 , 西 西 安 1022 陕 703) 1 0 8 706 ; 10 5 3 .空 军 工 程 大 学 工 程 学 院 , 陕西 西 安
s ts a t r a if c o y.
Ke wo ds:rng a e gy o,s r pd y r i l s r r ta own ne ta n v ga i n s s e ,s l- a i r to i r i l a i to y t m e fc lb a i n,gy o r f , r d it a c 1r m ee is c e o t r b e a
意 的仿 真 结 果 。
关键 词 : 光 陀 螺 , 联 惯性 导 航 系 统 , 激 捷 自标 定 , 螺 漂 移 , 速 度 计 零 位 陀 加
中 图 分 类 号 : N2 9 T 4 文献标识码 : A
S u f S l — lbr to c i ue f r S ns r Er o s i t dy o e f Ca i a i n Te hn q o e o r rБайду номын сангаас n Ri g La e y o S r pd wn I r i lNa i a i n S s e n s r G r t a o ne ta v g to y t m
捷联惯导系统加速度计标度因数和安装误差的试验标定

捷联惯导系统加速度计标度因数和安装误差的试验标定
杨常松;徐晓苏
【期刊名称】《测控技术》
【年(卷),期】2005(024)012
【摘要】研究了捷联惯导系统惯性测量组合中加速度计标度因数和安装误差的标定问题.对捷联惯性测量组合中3路加速度计建立了输出模型,提出了在三轴转台上采用多位置试验对加速度计标度因数和安装误差进行标定的方法.实验表明,本方法能够有效地标定出惯性测量组合中加速度计的标度因数和安装误差,具有较高的精度,对提高捷联惯导系统的精度有着重要的作用.
【总页数】3页(P57-59)
【作者】杨常松;徐晓苏
【作者单位】东南大学,仪器科学与工程系,江苏,南京,210096;东南大学,仪器科学与工程系,江苏,南京,210096
【正文语种】中文
【中图分类】U666.16
【相关文献】
1.基于谐波分析的捷联惯导系统加速度计组件标定技术 [J], 杨鹏翔;秦永元;李旦;周琪
2.一种捷联惯导系统加速度计时间延迟参数标定方法 [J], 邵会兵;王彬;申亮亮
3.无陀螺捷联惯导系统加速度计安装误差研究 [J], 汪小娜;王树宗;朱华兵
4.捷联惯导系统陀螺安装误差的精确标定方法 [J], 万彦辉;裴听国;秦永元
5.光纤捷联惯导系统加速度计内杆臂标定方法 [J], 周广涛;许伟通;叶攀
因版权原因,仅展示原文概要,查看原文内容请购买。
激光陀螺捷联惯性导航系统的误差参数标定

激光陀螺捷联惯性导航系统的误差参数标定
杨孟兴;徐兵华
【期刊名称】《中国惯性技术学报》
【年(卷),期】2008(016)003
【摘要】惯性器件标定一般都必须对北和调平,以消除地速及重力加速度的影响,但是不适合在靶场及其它野战环境下.根据激光捷联惯导系统的误差方程,在激光捷联惯性组合不水平指北情况下,通过12位置的标定方法,抵消地速及重力加速度的影响,从而得出加速度计的误差参数和激光陀螺的常值漂移;然后通过单轴转台,标定出陀螺的安装误差和标度因数;最后分别在引北调平和在不水平指北的12位置下对激光捷联组合进行标定,并对实验精度进行对比,两者误差比较小,认为此方法可以满足激光陀螺捷联系统的标定要求.本方案利用最少的测试位置,得到了所有需要的信息,利用率高.
【总页数】4页(P306-309)
【作者】杨孟兴;徐兵华
【作者单位】中国航天时代电子公司,第十六研究所,西安,710100;中国航天时代电子公司,第十六研究所,西安,710100
【正文语种】中文
【中图分类】U666.1
【相关文献】
1.激光陀螺捷联惯性导航系统的误差系数标定研究 [J], 徐兵华;杨孟兴
2.激光陀螺捷联惯性导航系统解析对准误差特性分析 [J], 陈河;张志利;周召发;刘朋朋;赵晓枫
3.激光陀螺捷联惯性导航系统误差分析及仿真计算 [J], 吉翠萍;陈勇;雷宏杰;韩宗虎;陈林峰
4.激光陀螺捷联惯性导航系统中惯性器件误差补偿技术 [J], 熊智;刘建业;林雪原;曾庆化
5.激光陀螺捷联惯性导航系统IMU误差标定 [J], 王建中
因版权原因,仅展示原文概要,查看原文内容请购买。
某型捷联式惯导标定原理及步骤

引言 目前由于计算机技术的不断进步,捷联惯性导航系统 逐渐成为惯性导航领域的研究重点,而标定是其转入导航 工作前的关键性工作[1]。 当前,操作人员对于某型捷联式惯性导航系统(以下 简称捷联惯导)的了解仅仅限于工艺层面。对于该型惯导 的初始位置为什么要指北安装、为什么需要标定和如何标 定并不了解。为了更深入的让操作人员了解捷联惯导,更 好的指导现场产品的深修精修。下面通过分析捷联惯导的 误差模型和标定原理,重点阐述捷联惯导的标定步骤。
(16)
kgzM z Wz AzxWy AzyWx (Dzx Ax Dzz Az Dzf )(9)
(17)
将惯导绕 x 轴以 Wx 角速率正转角度 椎x,惯导中的陀 螺感应到的 X 轴、Y 轴、Z 轴角速率分别为 Mx、My、Mz,积分 后得到对应 X 轴、Y 轴、Z 轴旋转的正转角度 Xmxz、Xmyz、Xmzz, 将惯导绕 x 轴以 Wx 角速率反转角度 椎x,惯导中的陀螺感 应到的 X 轴、Y 轴、Z 轴角速率分别为 Mx、My、Mz,积分后得 到对应 X 轴、Y 轴、Z 轴旋转的负转角度 Xmxf、Xmyf、Xmzf。将 Xmxz、Xmyz、Xmzz、Xmxf、Xmyf、Xmzf 代入公式(7)可以计算出 x 轴的 陀螺刻度系数 Kgx,见公式(10),陀螺安装偏角 Ayz、Azy,见公 式(11)、公式(12)。
图1 1 误差模型 该 型 捷 联 式 惯 导 的 数 学 误 差 模 型 [2]见 公 式(1)~ 公 式 (6)。 KgxM x Wx AxyWz AxzWy Dxx Ax Dxy Ay Dxf (1) KgyM y Wy AyxWz AyzWx Dyx Ax Dyy Ay Dyf(2)
外场条件下旋转捷联惯导系统旋转轴不正交误差标定方法

〇 引 言
旋转调制技术通过在惯性器件上加装转动机构和测角 装置, 利用旋转将器件误差调制成周期变化的形式, 在导航 解算中利用积分运算减少系统误差的累积, 从 而提高导航 精度 M , 是一种有效提升捷联惯导系统导航精度的手段。 旋转调制捷联惯导系统根据转轴的数目可以划分为单轴系 统、 双轴系统、 多轴系统等, 其中单轴方位旋转捷联惯导系 统通过绕方位转轴周期性转动, 可以有效抵消与转轴垂直 的惯性元件的漂移误差。因其结构相对简单、 成本低、 精度
A bstract :Rotating-axial nonorthogonal error is the major indexing mechanism error of rotation strapdown inertial navigation system (SINS) , it has the most significant effect on system accuracy. Aming at the shortage that the rotating-axial nonorthogonal error calibrate method based on the change of carrier attitude can only ap plied to the stationary base, a calibration method based on Kalman filter is put forward to realize the calibration of nonorthogonal error under outfield conditions with rocking disturbances. State equations are established on the basis of the error model, and the calibration path is designed by the observability degree analysis. Simula tions and experiments show that the calibration method is with high accuracy and can realize the high precision calibration of rotating-axial nonorthogonal error under outfield conditions with rocking disturbances. Keywords:rotating-axial nonorthogonal error ;rocking disturbance ;outfield calibration ;Kalman filter ; observability degree analysis
光纤陀螺捷联惯导多位置系统级标定方法
光纤陀螺捷联惯导多位置系统级标定方法标定技术是捷联惯导系统领域的一项关键技术,本质上是一种误差补偿技术。
按照观测量的不同可以分为分立式标定和系统级标定,由于前者在研究方法上比后者更加趋于成熟,因此常常采用分立式标定来确定惯组的数学模型。
分立式标定依靠高精度三轴转台来进行一系列实验来得出陀螺仪与加速计模型中的各项参数,实验步骤多、标定时间长,且标定精度受转台限制无法进一步提升。
为使标定更有效率,越来越多的学者转向系统级标定方法的研究。
本文介绍了两种系统级标定的一般方法,分别是滤波法和解析法,代表了系统级标定的两种不同思路。
相较于解析法,运用滤波的方法来求解标定模型不仅原理简单,而且不涉及复杂的数学推导,精度高,标定路径编排较少。
因此本课题以卡尔曼滤波为基础来进行系统级标定方案的设计。
直接将惯组的待标定参数扩充到状态量中,得到的是一个30维的大系统。
为降低试验设计难度,提高滤波精度,本文对其进行降维处理。
通过引入了一种基于行初等变换的可观测性分析方法,运用该方法可以直观地识别出状态方程中哪些状态独立可观测、哪些状态不可观测、哪些状态非独立可观测。
基于可观测性的分析结果,在原有的状态方程中,保留独立可观测量,剔除不可观测量、合并非独立可观测量,从而达到简化系统方程,降低系统维数的目的。
最后依据降维后的系统,设计出了6个静态位置与6个单轴旋转位置,并对此进行了仿真试验,仿真试验结果表明该方案具有理论可行性。
之后进行了实际转台试验,将其与分立式标定结果进行比较。
通过对比四组五级海况实验的姿态变化曲线,可以清晰的看出系统级方案的补偿效果整体上优于分立式标定,故而这种基于降维后的系统级标定滤波方案具有一定的工程实践价值。
动基座下捷联惯导系统误差仿真与分析

=
r —— —
—— —— —
2/ : :其中 7误差 的影 响
c NE TcN LG E 技 界l c & EH 。。Y E Vw科 视
S in e & t c n l g iw ce c e h oo yv e
21 02年 0 月第 0 1 2期
各个误差同时存在 , 设三轴陀螺仪常值漂移为 一
一 =
结合动态误差方程 ,具体分析载体运动对系统 误差的影响。 由仿真结果可以看出: 2 . 载体的匀速运动对舒 勒周期基本没有影响 , .1 2 因为重力加速度随纬度改变变化不大 , = 2
8 8 n。 4. mi
00 。 , 速度计 零 位漂 移 为 7 .1/ 加 h =V 1 g初 =0。,
。 ~ 伸 一
时 r 糸 时 )…
…
一 . 一 一
一
图 6 载 体首 向摇 摆 时东 向陀螺 漂移对
姿 态 角误差 的 影响
可见 , 东向速度 、 北向速度和纬度的增大都会使
地球 周期变小 。
2 . 与傅科周期有关的振荡周期和载体的东 向速 .3 2
F f r( .] 、时 n
× 1 0 ’
^ 书 = 一 -. , ¨ ~ ¨ ≮ ,
)
~~ 一 n
{
]
广 —— —— —— ——— —— —…
一
_ t ¨ _
一
∞一 戋 砒 - ,
~ i +
: 0 一趣 一、
— —— — ——
+V
6V
=
-
o
(w s + 2 .i
2
对载体北向匀速运动进行仿真分析得 , 地球周期和
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
捷 联 惯 性 导 航 系 统 以其 特 有 的优 良特 性 广 泛 的 应 用 于 航空、 天、 航 军事 等 领 域 , 惯 性 器 件 ( 速 度 计 和 陀 螺 仪 ) 其 加 的误 差 在 很 大 程 度 上 直 பைடு நூலகம் 影 响 了 导 航 系 统 的 可 达 精 度 , 故
目前 , 然 G S具 有精 确制 导能 力 , 由于大气 电离 虽 P 但
( h e o d Ar l r n ie rn ol e Xi a 1 0 5 C i a T eS c n t l y E g e ig C l g , ’ n 7 0 2 , h n ) ie n e
Ab t a t Th r rp r me e f n ri sr me t n i e i a u e n e ie ma h n ewi o k n me sr c : ee r a a t r e t i t o oi a n u n r a me s r me t vc y c a g t w r ig t , i nt d h i
摘
要 :随着工作时间 的推移 , 捷联惯性导航系统 中的惯 性器件 测量精 度会 因为误 差参数 发生变 化而 降
低, 误差逐 渐被积 累 , 而降低 系统 导航精度 。针对此 问题 , 进 提出 了一 种基于 G S速度 、 P 位置信 息的捷联 惯 导系统 惯性 测量装置输 出误差 系数 动态标定的方法 。首先 采用 S g- ua自适应滤 波实现组合 导航状 aeH s 态最 优估 计 , 然后 引入 迭代最小二乘法 , 用导航误差对系统惯性器件 的误差 系数进行标定 。经计算机仿 利
情 况 、 气折 射 以 及 美 国军 方 人 为 的误 差 干扰 , P 空 G S只 能 作 为 辅 助 导 航 设 备 。I S G S是 最 先 进 的全 天 候 自主 式 制 导 N/ P
wh c a e t e me s r me tp e iin Sde r a e nd t e e o f S NS i c u i h c us h a u e n r c so i c e s d a h r r o I S a c multd. c r ng t hi i a e Ac odi o t s. n
21 0 1年 第 3 0卷 第 5期
传感器与微系统 ( rnd cr n coytm T cn l i ) Ta sue adMi ss eh o g s r e oe
7 9
捷 联 惯 导 系 统 误 差 系数 动 态 标 定 方 法 探 究
李 东亮 , 雪梅 ,王 涛 王
( 二炮兵工程学 院 。 西 西安 702 ) 第 陕 10 5
o d rt mp o e n v g t n p e ii n o I r e i r v a i ai rc so f S NS, y a c l c l r t n meh d b s d o G S’ e o i a d o o a d n mia ai ai t o a e n P b o S v lc t n y
S ud f d na i a i r to e ho o I t y o y m c c lb a i n m t d f r S NS’ S
e r r pa a e e s r o r m t r
L n -i n I Do g l g, W A NG e m e ,W ANG o a Xu — i Ta
p sto no m ain fre r rpa a tr s p tf r r o ii n i fr t o ro r mee s i u o wa d.S g — us da tv Ka ma le s u e o g tt s o a e h a a p ie l n f t r i s d t e he be t i n vg to tt a d t n,t s sae i e o c lbr t h ro r m ee so n rilme s r m e td vc Th a ia in sa e, n he hi tt s us d t ai ae t e e r rpaa t r f ie a a u e n e ie. e t smu ain i i t s t t h er r ai ain a c lbrt t e ro n i r v h p e iin f t e i e il i lto ndcae ha te ro c br t c n a i ae h e r r a d mp o e t e r cso o h n r a l o t
n v g to y t a i a i n s sem.
Ke wor s: SI y d NS;e r rp r m ee ai r to ro a a t rc lb ain; e o o p n ain r rc m e s to
0 引 言
误 差 系数 标 定 。
真验 证 , 方 法 可 以 实 现 在 运 动 中 对 系 统 误 差 系 数 进 行 标 定 , 而 提 高 捷 联 式 惯 性 导 航 系 统 的 导 航 精 度 。 该 进 关键 词 :捷 联 惯 导 系 统 ; 差 系 数 标 定 ; 差 补 偿 误 误 中 图 分 类 号 :V6 6 1 6 . 文 献 标 识 码 :A 文 章 编 号 :10 -7 7 2 1 )50 7 -4 0 09 8 ( 0 1 0- 0 90 -