捷联惯导系统陀螺罗经对准性能的协方差分析
捷联惯导系统性能分析

捷联惯导系统性能分析摘要本文简要介绍捷联式惯性导航系统的各种分析技术,对捷联惯导系统算法验证的过程进行了讨论。
封闭形式分析仿真驱动程序,可以用来锻炼/验证捷联算法方程。
分析的精度捷联络筒,划船和分析方法位置融合算法(包括位置算法的折叠效果)函数的算法重复率和系统振动输入。
包括的是一个简化的分析模型,该模型描述可用于翻译系统到惯性传感器作为传感器组件的函数的输入的振动安装失衡。
捷联系统静态漂移和的旋转测试程序/方程描述捷联式传感器的校准系数确定。
该文件概述了卡尔曼滤波器的设计和协方差分析技术,并介绍了验证辅助捷联惯导系统的一般步骤卡尔曼滤波器的配置。
最后,论述了系统集成测试的一般过程验证所有的硬件,软件,系统功能操作进行正确和准确和界面元素。
坐标框架在本文中,使用一个坐标系是一个分析性的抽象定义的三个相互垂直单位矢量。
一个坐标系可以看作一组三个相互垂直的线(轴)通过一个共同的点(原点)与来自沿着坐标轴的原点上的单位向量。
在本文中,每个坐标系的原点的物理位置是任意的。
主坐标帧利用有以下几种:B帧=“身体”捷联式惯性传感器轴平行的坐标系。
N帧=“导航”的坐标系在当地具有Z轴平行地垂直向上定位。
A“漂移方位”N帧有水平的X,Y轴旋转相对于非旋转的惯性空间在本地地球的速度的垂直分量绕Z轴。
“自由方位”N帧的转动惯量为零率X,Y轴的Z轴周围。
“地理”N帧的X,Y轴绕Z轴旋转,以维持当地的真北Y轴平行。
E型=“地球”的引用与固定角几何相对于地球坐标系。
I帧=“惯性”非旋转坐标系。
符号V =向量没有特定的坐标系指定。
向量是一个有长度的参数和方向。
纸中使用的载体,被分类为“免费的矢量”,因此,没有坐标框架中,他们分析描述的理想地点。
V A =列矩阵的元素等于V的坐标系A轴的投影。
“投影V对每个Frame A轴等于与坐标框架的V的点积A轴的单位向量。
V A×=斜对称的(或跨产品)的形式表示的正方形矩阵的V A0 - VZA VYAVZA 0 - VXA- VYA VXA 0VXA,VYA,VZA是V A的组成部分。
光纤陀螺捷联惯导系统级标定方法的研究
光纤陀螺捷联惯导系统级标定方法的
研究
光纤陀螺捷联惯导系统是一种高精度的导航系统,它结合了光纤陀螺和捷联惯性导航技术,可以在不依赖外部信号的情况下提供高精度的导航信息。
然而,由于光纤陀螺和惯性测量单元的误差会影响系统的精度,因此需要进行系统级标定来提高系统的性能。
系统级标定方法是指通过对整个系统进行标定,包括光纤陀螺、惯性测量单元和导航算法等,来提高系统的精度和可靠性。
目前,常用的系统级标定方法包括离线标定和在线标定两种。
离线标定是指在系统安装和调试完成后,对系统进行标定。
离线标定通常需要使用高精度的标定设备,如转台、全站仪等,对系统进行精确测量和标定。
离线标定的优点是精度高、稳定性好,但需要专业的设备和技术人员,成本较高。
在线标定是指在系统运行过程中,通过对系统的输出进行实时监测和修正,来提高系统的精度和可靠性。
在线标定通常需要使用一些先进的算法和技术,如卡尔曼滤波、粒子滤波等,对系统的输出进行实时修正。
在线标定的优点是成本低、易于实现,但精度和稳定性相对较差。
总之,系统级标定是提高光纤陀螺捷联惯导系统精度和可靠性的重要手段。
在实际应用中,需要根据具体情况选择合适的标定方法,以提高系统的性能和可靠性。
光纤陀螺捷联惯性导航系统标定测试技术研究的开题报告

光纤陀螺捷联惯性导航系统标定测试技术研究的开题报告一、研究背景惯性导航系统(Inertial Navigation System, INS)是一种有效的位置和速度测量手段,具有高精度、高可靠性等特点,被广泛应用于航空、航天、海洋、测绘、导航等领域。
光纤陀螺是惯性导航系统中的核心部件之一,其具有精度高、稳定可靠、长时间工作等特点。
然而,由于光纤陀螺的非线性特性和误差积累,陀螺漂移等问题,使得 INS 在长期使用过程中需要进行定期标定和校准以保证其精度和可靠性。
同时,由于 INS 在使用过程中存在复杂的运动和工作环境,标定测试技术也需要能够适应不同的工作环境和精度要求。
因此,本研究旨在针对光纤陀螺捷联惯性导航系统的标定测试技术进行深入研究和探讨。
二、研究内容和目标1. 研究光纤陀螺捷联惯性导航系统的原理和组成结构,并分析其误差来源和误差特征;2. 分析现有的光纤陀螺标定测试技术及其优缺点,并结合我国航空领域发展现状和需求,提出针对不同环境和精度要求的标定测试方案;3. 设计标定测试实验方案,建立光纤陀螺捷联惯性导航系统的测试平台和数据处理系统,进行标定和测试实验,并分析实验结果和误差特征;4. 探索和优化光纤陀螺捷联惯性导航系统的标定测试技术,提高其精度和可靠性。
三、研究方法和技术路线1. 文献资料研究法:对 INS 和光纤陀螺的发展历程、工作原理、误差来源、标定测试技术等进行系统分析和综述;2. 建模分析法:建立光纤陀螺捷联惯性导航系统的数学模型,分析其误差源和误差特征;3. 设计实验法:设计标定测试方案,建立测试平台和数据处理系统,进行标定和测试实验,并分析实验结果和误差特征;4. 优化探索法:根据实验结果和分析,探索和优化光纤陀螺捷联惯性导航系统的标定测试技术。
四、研究意义和预期成果本研究的意义在于对光纤陀螺捷联惯性导航系统的标定测试技术进行深入研究和探讨,提高 INS 的精度和可靠性,同时对我国航空领域的发展和应用具有重要意义。
捷联惯性导航系统中陀螺补偿的探讨
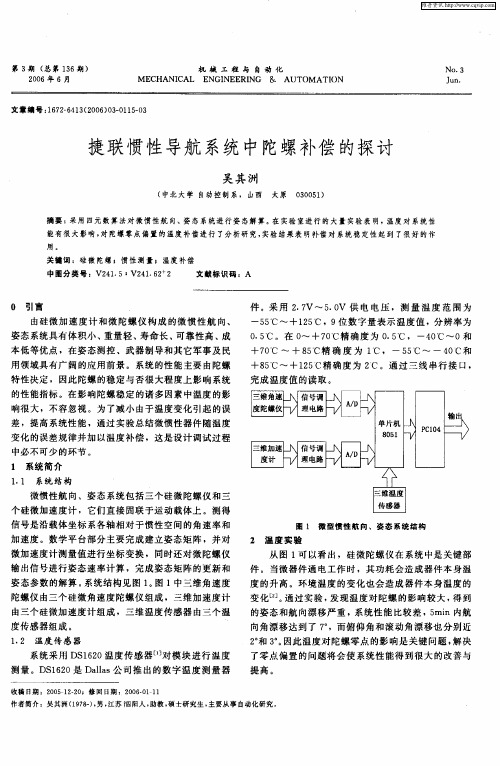
系统 采用 D 12 度 传感 器 f对 模块 进 行 温度 S 60温 l
测 量 。D 1 2 S 6 0是 D l s公 司推 出 的数 字 温度 测 量 器 al a
收 稿 日期 :2 0 22 I修 回 日期 20 — 1l 0 51 —0 0 60 1
作者简介 z吴其洲( 9 8) 男, 1 7一 , 江苏 泗 阳人 , 助教 , 士研究生 , 硕 主要从事 自动化研究 。
+8 ℃~ +1 5 5 2 确 度 为 2 C精 C。通 过 三 线 串行 接 口,
完成 温 度值 的读 取 。
特性 决定 ,因此 陀螺 的稳定 与 否很 大程 度上影 响 系统
的性 能指标 。在 影 响陀螺稳 定 的诸 多 因素 中温 度 的影
响很 大 ,不 容忽 视 。为 了减小 由于 温度变 化 引起 的误
维普资讯
第 3 ( 第 1 6期 ) 期 总 3
2 0 年 6月 06
机 械 工 程 与 自 动 化
ME CHANI CAL ENGl NEERI NG & AUTOM ATI ON
No 3 .
J n. u
文 章 编 号 :6 26 1 (0 6 0— 1 50 1 7— 4 3 20 )30 1 —3
差 ,提高 系统性 能 ,通过 实验 总结微 惯性 器件 随 温度
变化 的误差 规律并 加 以温度 补偿 ,这 是设 计调 试过 程 中必 不可少 的环节 。 1 系统简 介
1 1 系统结构 .
微惯性 航 向 、姿 态系统 包括 三个 硅微 陀螺 仪 和三
个 硅微加 速度计 ,它 们直接 固联 于运 动载 体上 。测 得 信 号是沿 载体坐标 系各 轴相 对 于惯性 空 间的角 速率 和
激光陀螺捷联惯性导航系统的误差参数标定

激光陀螺捷联惯性导航系统的误差参数标定
杨孟兴;徐兵华
【期刊名称】《中国惯性技术学报》
【年(卷),期】2008(016)003
【摘要】惯性器件标定一般都必须对北和调平,以消除地速及重力加速度的影响,但是不适合在靶场及其它野战环境下.根据激光捷联惯导系统的误差方程,在激光捷联惯性组合不水平指北情况下,通过12位置的标定方法,抵消地速及重力加速度的影响,从而得出加速度计的误差参数和激光陀螺的常值漂移;然后通过单轴转台,标定出陀螺的安装误差和标度因数;最后分别在引北调平和在不水平指北的12位置下对激光捷联组合进行标定,并对实验精度进行对比,两者误差比较小,认为此方法可以满足激光陀螺捷联系统的标定要求.本方案利用最少的测试位置,得到了所有需要的信息,利用率高.
【总页数】4页(P306-309)
【作者】杨孟兴;徐兵华
【作者单位】中国航天时代电子公司,第十六研究所,西安,710100;中国航天时代电子公司,第十六研究所,西安,710100
【正文语种】中文
【中图分类】U666.1
【相关文献】
1.激光陀螺捷联惯性导航系统的误差系数标定研究 [J], 徐兵华;杨孟兴
2.激光陀螺捷联惯性导航系统解析对准误差特性分析 [J], 陈河;张志利;周召发;刘朋朋;赵晓枫
3.激光陀螺捷联惯性导航系统误差分析及仿真计算 [J], 吉翠萍;陈勇;雷宏杰;韩宗虎;陈林峰
4.激光陀螺捷联惯性导航系统中惯性器件误差补偿技术 [J], 熊智;刘建业;林雪原;曾庆化
5.激光陀螺捷联惯性导航系统IMU误差标定 [J], 王建中
因版权原因,仅展示原文概要,查看原文内容请购买。
单轴旋转捷联惯导系统误差仿真分析

1. 为了验证单轴旋转对激光陀螺常值漂移的补偿效果,我们采用实际的导航算法,仿真分析了静止状态和单轴旋转时激光陀螺常值漂移引起的导航误差。
设定初始经纬度为106.6906︒,26.5019︒,初始误差角为0,三个激光陀螺常值漂移为0.001︒/h ,设定旋转角速度为0.3︒/s 。
0244872t/h∆ψ / (')244872t/h∆θ / (')244872-0.02-0.01t/h∆γ / (')244872t/hδV e / (m /s )-0.1-0.0500.050.1t/hδV n / (m /s )t/hδL / (')244872t/hδλ / (')图1 静止状态下激光陀螺漂移为0.001︒/h 时引起的导航误差0244872t/h∆ψ / (')-0.02-0.01t/h∆θ / (')t/h∆γ / (')244872t/hδV e / (m /s )244872t/h δV n / (m /s)244872t/hδL / (')t/hδλ / (')图2 单轴旋转下激光陀螺漂移为0.001︒/h 时引起的导航误差从图中可以看出,单轴旋转补偿了水平方向上陀螺漂移引起的导航误差,系统经度误差由6'降至2'左右,速度误差和航向误差也有所下降。
但由于轴向陀螺漂移不能得到补偿,0.001︒/h 的陀螺常值漂移在72h 内依旧产生2'的经度误差,这对于高精度的惯导系统依然是致命的,因此需要采用其他辨识方法精确标较轴向陀螺常值漂移。
2. 标度因数误差对系统精度影响2.1 10ppm 对称性标度因数误差引起的导航误差-3t/h∆ψ / (')-3t/h∆θ / (')0244872-3t/h∆γ / (')0244872-3t/hδV e / (m /s )244872-3t/hδV n / (m /s )244872-3t/hδL / (')244872t/hδλ / (')图3 静止状态下激光陀螺标度因数误差为10ppm 时引起的导航误差2.2 0.1ppm 非对称性标度因数误差引起的导航误差t/h∆ψ / (')t/h∆θ / (')0244872t/h∆γ / (')0244872t/hδV e / (m /s )244872t/h δV n / (m /s )244872t/hδL / (')t/hδλ / (')图4 单轴旋转下激光陀螺非对称性标度因数误差为0.1ppm 时引起的导航误差3. 安装误差对系统精度影响3.1 10"安装误差静止状态下引起的系统导航误差t/h∆ψ / (')t/h∆θ / (')t/h∆γ / (')t/hδV e / (m /s )-0.1-0.0500.050.1t/h δV n / (m /s )t/hδL / (')t/hδλ / (')图5 静止状态下激光陀螺安装误差为10"时引起的导航误差3.2 10"安装误差连续旋转时引起的导航误差t/h∆ψ / (')t/h∆θ / (')-0.50.5t/h∆γ / (')t/hδV e / (m /s )t/hδV n / (m /s)t/hδL / (')-0.50.5t/hδλ / (')图6 单轴旋转下激光陀螺安装误差为10"引起的导航误差4. 加速度计的标度因数误差和安装误差的补偿效果4.1 静止状态下加速度计标度因数10ppm 、安装误差10"时引起的导航误差t/h∆ψ / (')t/h∆θ / (')t/h∆γ / (')t/hδV e / (m /s )244872t/hδV n / (m /s )244872t/hδL / (')244872t/hδλ / (')图7 静止状态下加速度计标度因数10ppm 、安装误差10"时引起的导航误差4.2 连续转动状态下加速度计标度因数10ppm 、安装误差10"时引起的导航误差t/h∆ψ / (')t/h∆θ / (')t/h∆γ / (')t/hδV e / (m /s )t/hδV n / (m /s )t/hδL / (')244872t/hδλ / (')图8 单轴旋转下加速度计标度因数10ppm 、安装误差10"时引起的导航误差5. 旋转方式的选择仿真中设定激光陀螺常值漂移为0.001︒/h ,加速度计零偏为20μg ,激光陀螺非对称性标度因数误差为0.1ppm ,加速度计标度因数误差为10ppm ,安装误差为10"。
光纤陀螺捷联旋转式惯导系统关键技术的研究
光纤陀螺捷联旋转式惯导系统关键技术的研究一、引言在现代高精度导航和定位领域,惯性导航系统被广泛应用,而其中光纤陀螺捷联旋转式惯导系统作为一种重要的惯性导航技术,其关键技术的研究至关重要。
本文旨在深入探讨光纤陀螺捷联旋转式惯导系统的关键技术,并对其进行全面评估,以期更好地理解该技术的深度和广度。
二、光纤陀螺捷联旋转式惯导系统的概述光纤陀螺捷联旋转式惯导系统是一种利用光纤陀螺仪和加速度计相结合的惯性导航系统,它通过测量机体在三个轴向的角速度和加速度,从而实现对机体姿态和运动状态的精确测量和跟踪。
在实际应用中,光纤陀螺捷联旋转式惯导系统具有高精度、高稳定性、短时间内实现导航信息的快速更新等优点,因此受到了广泛的关注和研究。
三、关键技术的研究与评估1. 光纤陀螺技术光纤陀螺作为光学陀螺仪的一种,是光纤陀螺捷联旋转式惯导系统的核心组成部分。
其工作原理是利用Sagnac效应测量旋转角速度,通过光的干涉效应实现对角速度的测量和输出。
目前,光纤陀螺技术的关键问题主要包括温度漂移、偏航角误差和线性度等方面的改进和优化。
未来,通过引入新型光纤材料、优化光路设计、提高检测分辨率等手段,可以进一步提高光纤陀螺的性能,实现更高精度的导航和定位。
2. 捷联技术捷联技术是光纤陀螺捷联旋转式惯导系统中另一个关键的技术环节,主要用于实现陀螺和加速度计的信息融合和互补,从而提高系统的整体性能。
当前,捷联技术主要面临的挑战包括陀螺和加速度计之间的误差补偿、状态估计算法的改进和实时性能的优化等方面。
未来的研究方向应着重于利用先进的滤波算法、数据融合技术和卡尔曼滤波理论等方法,不断提高系统的精度和稳定性。
3. 转式惯导系统设计光纤陀螺捷联旋转式惯导系统的设计是整个系统研究中的关键环节之一。
其中,转子设计、机械结构设计和系统布局等方面都对系统的性能和可靠性产生着重要影响。
为了进一步提高系统的精度和鲁棒性,未来的研究方向应包括提高机械结构的稳定性、减小系统的体积和重量、优化传感器布局等方面,以满足不同领域对于导航系统的多样化需求。
光纤陀螺捷联惯导系统罗经法初始对准研究
传感器与微 系统 ( rnd cr n coytm T cnlg s T asue dMi ss eh o i ) a r e oe
5 3
光 纤 陀螺 捷 联 惯 导 系统 罗 经 法初 始 对 准 研 究
王 海涛
( 江 大 学 机械 电 子 控 制 工 程 研 究 所 , 江 杭 州 3 0 2 ) 浙 浙 10 7
光纤陀螺捷联惯性导航 系统 在未来具有非常广泛的应用前
景 。初 始 对 准 是 捷 联 惯 导 系统 的 关 键 技 术 之 一 , 型 的 初 典
实体平 台, 可以利用罗经效应 , 完成捷联惯导 系统 的罗 经法 对准 。经典 的捷 联惯 导 系统 罗经法 初 始对 准分 为 2个 阶 段: 解析式粗对准和精对 准 。但解析 式粗对 准方法 的缺 点
n vg t n s se i i ey u e . o a smeh d f r n t lain n ssu id a d t ei r v me ti p o o e a ia i y t m sw d l s d C mp s t o o i a l me t t d e n h mp o e n s r p s d o i i g i frS N n sa in r a e w t n n wn a i t n o io t l t t d . o rse i a l n n t o h w o I S o tt a y b s i u k o zmu h a d h rz n a at u e F u —t p i t l i me t o h i n i ag me h d s o i ls i a e n s l e it tr e se s w ih a e o io tl a in n , z t c a s l n n n n ca sc h s b e i i d n o h e tp h c r h r na l me t a i h o re ai me t a d mp f i z g mu g c mp s l n n . h nt l l n n e tw t h e t o a e n t td t a h l n n a su e o a sai me t T e i i a i me t s i t e n w meh d h sd mo s ae h tte a i me t n a s r g i ag t h r g c
第1讲:捷联惯导系统(11)Allan方差
捷联惯导系统 的关键问题捷联系统的导航任务关键问题(光学陀螺捷联惯导系统): (一)惯性器件误差的分析与补偿1.随机误差2.温度漂移误差(二)初始对准初始对准的任务是确定捷联矩阵的初始值。
初始对准的误差将会对捷联惯导系统的工作造成难以消除的影响,导致对准误差的主要因素:1.惯性器件误差;2.干扰运动。
因此,滤波技术对捷联系统尤为重要。
(三)姿态解算中的动态误差补偿高频动态环境下,必须补偿如下的整流误差:1.圆锥误差(姿态误差)2.划船误差(速度误差)3.涡卷误差(位置误差)第一部分惯性器件误差的 分析与补偿1.光学陀螺的数学模型与主要性能指标 1.1 光学陀螺的工作原理Sagnac环形干涉仪1.2 数学模型与性能指标由IEEE 标准给出的光学陀螺输入输出模型为160]101][[)/(−−+++=∆∆K D E I t N S ε (1-1)式中:为标称的标度因子,单位:(角秒/脉冲数);0S /P "t N ∆∆/为输出脉冲速率,单位:(脉冲数/秒); s /P I 为输入角速度,单位:(角秒/秒);s /"E 为环境敏感误差,主要由温度变化引起,单位:; s /"D 为漂移误差,单位:;s /"k ε为标度因子误差,单位:。
ppm 表征光学陀螺的主要性能指标有标度因数、零偏、零漂、随机游走系数,其中后三项用于描述光学陀螺输出中的漂移误差。
标度因数:陀螺仪输出量与输入角速度的比值,通常取/P′′(脉冲数/角秒)的量纲。
零偏:是当输入角速度为零时陀螺仪的输出,以规定时间内测得的输出量平均值相应的等效输入角速度表示,习惯上取(度/小时)的量纲。
h/o零漂:又称为零偏稳定性。
通常,静态情况下光学陀螺长时间稳态输出是一个平稳随机过程,即稳态输出将围绕零偏起伏和波动,表示这种起伏和波动的标准差被定义为零漂,其单位用表示。
h/o随机游走系数:由白噪声产生的随时间积累的输出误差系数,其量纲为h/o,它反映了光学陀螺输出随机噪声的强度。
船用捷联惯导系统解析粗对准的误差分析
文章编号:1006-7043(1999)04-0046-05船用捷联惯导系统解析粗对准的误差分析柴卫华,沈晓蓉,张树侠(哈尔滨工程大学自动化学院,黑龙江哈尔滨 150001)摘 要:讨论了两种船用捷联惯性导航系统(SDINS)静基座解析粗对准的方法,选择不同的参考矢量求解变换矩阵,将导致不同的失准角误差。
结果对比给出了形象的说明。
关 键 词:捷联式惯性导航系统;初始对准;误差分析中图分类号:TP15 文献标识码:AError Analysis of Analytic Rough Alignmentfor Marine SDINSCHAI Wei_hua,SHEN Xiao_rong,ZHANG Shu_xia(A utomation Colleg e,Harbin Engineering U niversity,Harbin 150001,China)Abstract:T his paper discusses tw o methods of analytic rough alignment for marine SDINS on stationary base.During solving the transformation matrix,choosing differ ent reference vectors w ill result in different m isalignment angles.T he computation re sults give a visual demonstration.Key words:SDINS;initial alignment;error analysis惯性导航设备的初始对准过程具有重要的理论和实际意义。
捷联式惯性导航系统中,捷联矩阵起着物理平台的作用,即我们所熟知的 数学平台 。
如何在较短的时间内以一定的精度确定捷联矩阵的初始值是非常有意义的。