FANUC刚性攻丝功能
FANUC系统刚性攻丝功能详解
FANUC系统刚性攻丝功能详解首先,刚性攻丝功能是指机器人在进行攻丝操作时,能够保持稳定的力和位置控制。
这意味着机器人可以根据既定的程序在工件表面上产生高质量的螺纹。
这种功能对于需要精确控制螺纹深度、螺距和螺纹形状的应用非常重要。
刚性攻丝功能的实现主要依赖于FANUC系统的硬件和软件设计。
FANUC系统使用高性能的力传感器和位置传感器来实时监测机器人与工件之间的力和位置信息。
这些传感器能够提供高分辨率和高精度的测量结果,从而保证机器人的稳定性和准确性。
在软件方面,FANUC系统提供了一套完整的攻丝控制算法。
这些算法对机器人的运动进行实时的力和位置调整,以实现精确的攻丝操作。
例如,在攻丝过程中,系统可以根据传感器信息实时调整机器人的速度和力度,以适应工件表面的不均匀性和材料特性。
此外,FANUC系统还提供了丰富的控制参数和设置选项,以满足不同应用的需求。
用户可以根据具体的攻丝要求进行调整,包括螺纹深度、起刀点位置、进给速度等等。
这些参数的灵活调整使得FANUC系统能够适应各种不同的攻丝操作,从而提高生产效率和质量。
最后,FANUC系统的刚性攻丝功能还具备一定的智能化特性。
系统可以通过学习和优化算法,自动适应不同材料和工件的攻丝过程。
它能够根据历史数据分析出最佳的攻丝参数和路径,从而提高攻丝的效率和质量。
总结起来,FANUC系统的刚性攻丝功能通过高性能的传感器、智能化的控制算法以及灵活的参数调整,实现了高质量和高效率的攻丝操作。
这种功能对于提高机器人的应用范围和工作效果具有重要意义,为用户创造了更多的机会和价值。
FANUC刚性攻丝回退案例介绍
FANUC刚性攻丝回退案例介绍刚性攻丝是加工常用功能,在攻丝过程中,由于工件装卡精度或者加工程序编写等原因,断锥现象是比较常见的。
为了尽量避免此问题发生,客户期望通过检测主轴负载,在攻丝时,一旦负载异常,中断刚性攻丝循环,执行刚性攻丝返回动作。
本次功能测试在国内某客户处完成,测试系统为FANUC 0i mate-MD。
1功能介绍刚性攻丝回退(功能说明书中该功能命名为“刚性攻丝返回”)功能可以在复位操作,中断刚性攻丝时,通过PMC信号或者指令,执行刚性攻丝回退动作,将攻丝轴退回到R点位置,回退过程依然保持最近一次刚性攻丝同步位置关系。
需要注意的是,该功能在0i-TD与31i系统上均为选项功能,0i-TD系统功能诊断号为1174#2,31i系统诊断号为1163#6,可以通过以上诊断号确认系统是否具有此功能。
2功能实现刚性攻丝回退功能既可以通过PMC信号触发,也可通过指令执行,只需要利用参数即可进行切换。
使用PMC信号触发刚性攻丝回退,必须在MDI方式下,无法满足客户在MEM方式下的需求,因此本次调试将参数RG3设定为1,使用G30进行指令。
根据客户描述,初步考虑通过以下两种方案实现其需求:(1)利用中断型用户宏程序通过G30指令执行刚性攻丝回退动作,利用中断型用户宏程序功能,将刚性攻丝回退程序编写入宏程序中,在攻丝过程中,遇到主轴负载异常检测信号时,中断刚性攻丝循环,调用刚性攻丝回退宏程序,实现客户需求。
实验测试过程中,发现中断型用户宏程序在刚性攻丝循环中无效,确认功能说明,该功能对复合型固定循环无效。
即会出现如下现象:导通中断型用户宏程序信号后,刚性攻丝动作继续执行,循环结束后才可以执行所调用的宏程序。
因此可判断该方案不可行。
(2)利用外部工件号检索外部工件号检索功能通过PMC信号,检索预先在程序存储器中存储的程序,检测到自动循环启动信号下降沿后执行该程序。
当检测到攻丝轴异常负载时,通过外部复位信号(G8.7)中断刚性攻丝循环,停止攻丝动作,复位完成后利用外部工件号检索功能,调用刚性攻丝回退程序并执行,通过实验测试,实现客户描述的需求,方案可行。
FANUC设定参数实现刚性攻丝

FANUC设定参数实现刚性攻丝(大连机床集团有限责任公司黄贤鸿)1 两种攻丝方式的比较以前的加工中心为了攻丝, 一般都是根据所选用的丝锥和工艺要求, 在加工程序中编入一个主轴转速和正/ 反转指令, 然后再编人G84 /G74 固定循环, 在固定循环中给出有关的数据, 其中Z 轴的进给速度是根据F=丝锥螺距×主轴转速得出, 这样才能加工出需要的螺孔来。
虽然从表面上看主轴转速与进给速度是根据螺距配合运行的, 但是主轴的转动角度是不受控的, 而且主轴的角度位置与Z 轴的进给没有任何同步关系, 仅仅依靠恒定的主轴转速与进给速度的配合是不够的。
主轴的转速在攻丝的过程中需要经历一个停止-正转-停止-反转-停止的过程, 主轴要加速-制动-加速-制动, 再加上在切削过程中由于工件材质的不均匀, 主轴负载波动都会使主轴速度不可能恒定不变。
对于进给Z 轴, 它的进给速度和主轴也是相似的, 速度不会恒定, 所以两者不可能配合得天衣无缝。
这也就是当采用这种方式攻丝时, 必须配用带有弹簧伸缩装置的夹头, 用它来补偿Z 轴进给与主轴转角运动产生的螺距误差。
如果我们仔细观察上述攻丝过程, 就会明显地看到, 当攻丝到底,Z 轴停止了而主轴没有立即停住(惯量), 攻丝弹簧夹头被压缩一段距离, 而当Z 轴反向进给时, 主轴正在加速, 弹簧夹头被拉伸, 这种补偿弥补了控制方式不足造成的缺陷, 完成了攻丝的加工。
对于精度要求不高的螺纹孔用这种方法加工尚可以满足要求, 但对于螺纹精度要求较高,6H 或以上的螺纹以及被加工件的材质较软(铜或铝) 时, 螺纹精度将不能得到保证。
还有一点要注意的是, 当攻丝时主轴转速越高,Z 轴进给与螺距累积量之间的误差就越大, 弹簧夹头的伸缩范围也必须足够大, 由于夹头机械结构的限制, 用这种方式攻丝时, 主轴转速只能限制在600r/min 以下。
刚性攻丝就是针对上述方式的不足而提出的, 它在主轴上加装了位置编码器, 把主轴旋转的角度位置反馈给技控系统形成位置闭环, 同时与Z 轴进给建立同步关系, 这样就严格保证了主轴旋转角度和Z 轴进给尺寸的线生比例关系。
发那科FANUC系统刚性攻丝功能详解
发那科FANUC系统刚性攻丝功能详解在刚性攻丝时,主轴旋转一转所对应钻孔轴的进给量必须和攻丝的螺距相等,即必须满足如下的条件:P= F/SP:攻丝的螺距(mm)F:攻丝轴的进给量(mm/min)S:主轴的速度(rpm)刚性攻丝循环的过程中主轴的旋转和进给轴的进给之间总是保持同步。
也就是说,在刚性攻丝时,主轴的旋转不仅要实现速度控制,而且要实行位置的控制。
主轴的旋转和攻丝轴的进给要实现直线插补,在孔底加工时的加/减速仍要满足以下的条件以提高刚性攻丝的精度。
在普通的攻丝循环时G74/G84 (M 系列), G84/G88 (T 系列),主轴的旋转和Z轴的进给量是分别控制的,主轴和进给轴的加/减速也是独立处理的,所以不能够严格地满足以上的条件,特别是攻丝到达孔的底部时,主轴和进给轴减速到停止,之后又加速反向旋转过程时,满足以上的条件将更加困难。
所以,一般情况下,攻丝是通过在刀套内安装柔性弹簧补偿进给轴的进给来改善攻丝的精度的。
1刚性攻丝的指令刚性攻丝可以通过以下的任何一种指令完成:1)刚性攻丝指令在G74/G84 (M series) 或G84/G88 (T series)之前指定,如:_ M29 S _____;G84(G88) X_C_(Z_C_) Z_(X_) R_ P_ F_ K_ ;2)刚性攻丝指令与攻丝指令G74/G84(M series) 或G84/G88 (T series)在同一程序段,如:G84(G88) X_C_(Z_C_) Z_(X_) R_ P_ F_ K_ M29 S_;3) G74/G84 (M series) 或G84/G88 (T series) 作为刚性攻丝指令G84X_Y_Z_R_P_F_K_;为标准攻丝循环指令G74X_Y_Z_R_P_F_K_;为反螺纹攻丝循环指令刚性攻丝有两种方式:每转进给刚性攻丝(G99)和每分进给刚性攻丝(G98)。
下例为每转进给刚性攻丝方式(G99)。
FANUCFSSB高速刚性攻丝介绍
FANUCFSSB高速刚性攻丝介绍
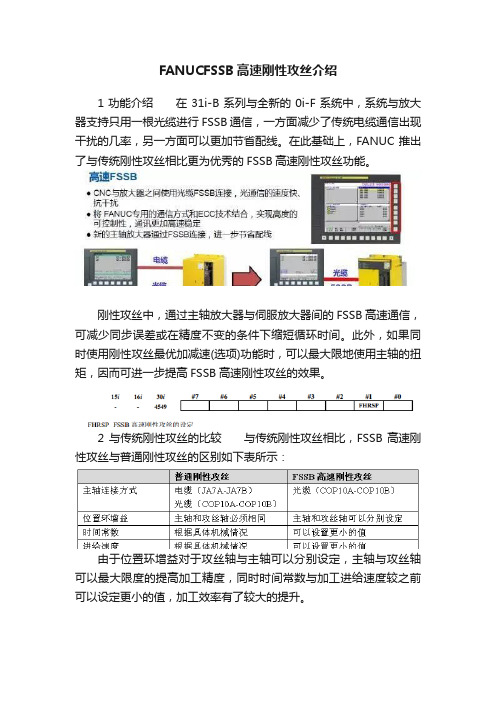
1功能介绍在31i-B系列与全新的0i-F系统中,系统与放大器支持只用一根光缆进行FSSB通信,一方面减少了传统电缆通信出现干扰的几率,另一方面可以更加节省配线。
在此基础上,FANUC推出了与传统刚性攻丝相比更为优秀的FSSB高速刚性攻丝功能。
刚性攻丝中,通过主轴放大器与伺服放大器间的FSSB高速通信,可减少同步误差或在精度不变的条件下缩短循环时间。
此外,如果同时使用刚性攻丝最优加减速(选项)功能时,可以最大限地使用主轴的扭矩,因而可进一步提高FSSB高速刚性攻丝的效果。
2与传统刚性攻丝的比较与传统刚性攻丝相比,FSSB高速刚性攻丝与普通刚性攻丝的区别如下表所示:
由于位置环增益对于攻丝轴与主轴可以分别设定,主轴与攻丝轴可以最大限度的提高加工精度,同时时间常数与加工进给速度较之前可以设定更小的值,加工效率有了较大的提升。
3限制条件下列情况下不能使用此功能:(1)模拟主轴刚性攻丝(2)伺服电机主轴刚性攻丝(3)主轴同步控制方式下的刚性攻丝
同时在FSSB刚性攻丝中,不能使用以下功能(1)双位置反馈(2)伺服HRV4控制。
FANUC系统数控加工中心刚性攻丝时的参数设定
在 FANUC 0i等数控 系统 中对刚性攻 丝 的处理 设置 了 3 种指令 模式 ,即 :①在 G84(攻丝 循环 )之前 由 M29 S X××X 指令 ;② 在 G84同一段 中 ,由 M29 S X×××指令 ;③不 用 M 代码 ,而直接 由 G84来指令 。但 不论 是哪种方式进行 刚性攻 丝 ,都必须具备最基本 的 3个 条件 :
(3)合 羽{凸 数。根据 主轴不 同传动结构 ,涉及刚性攻
【作者 简 介 】丁海萍(1979一),男,研究生,讲师,研究方向:机械制造及其自动化。 41
丝的参数是很多的。要合理设定这些参数 ,了解参 数的意义是 必要 的 ,并要抓住要害才能达到事半功倍 的效果 。本 文着重说 明各种参数 的具体含义 。
2010年 9月 第 9期 (总第 142期 )
广 西 轻 工 业 GUANGxIJ0uRNAL oF LIGHT lNDusTRY
机 械 与 电 气
F A N U C 系统 数 控加 工 中心 刚性 攻 丝 时的参 数设 定
丁 海 萍 ,杨 晶
(南通 职 业大学数 控 中心 ,江 苏 南通 226007)
【中图分类号 】TG659 【文献标识码 】 B
【文章编号 】 1003—2673(2010)09—41—02
1 引言 刚性攻丝功能 以高速高效 高精度 加工螺纹 而被越 来越多
的机 床用 户所青睐 ,因此调试好此功能 ,使其达 到高速高精度 的性 能 ,以满足用户广泛的 ̄JnY-需求是很有 必要 的,对于精度 要求高的深孔 ,应通过选用合适 的攻 丝方法和合理设置数控系 统参数等手段来实现。目前 刚性攻丝 已经成 为加工 中心不可缺 少 的一项主要功能。
FANUC系统设定参数实现刚性攻丝
仅供个人参考不得用于商业用途FANUC系统设定参数实现刚性攻丝两种攻丝方式的比较:以前的加工中心为了攻丝 , 一般都是根据所选用的丝锥和工艺要求 , 在加工程序中编入一个主轴转速和正 /反转指令 , 然后再编人 G84/G74 固定循环 , 在固定循环中给出有关的数据 , 其中 Z 轴的进给速度是根据 F =丝锥螺距×主轴转速得出 , 这样才能加工出需要的螺孔来。
虽然从表面上看主轴转速与进给速度是根据螺距配合运行的 , 但是主轴的转动角度是不受控的 , 而且主轴的角度位置与 Z 轴的进给没有任何同步关系 , 仅仅依靠恒定的主轴转速与进给速度的配合是不够的。
主轴的转速在攻丝的过程中需要经历一个停止-正转-停止-反转-停止的过程 , 主轴要加速-制动-加速-制动 , 再加上在切削过程中由于工件材质的不均匀 , 主轴负载波动都会使主轴速度不可能恒定不变。
对于进给 Z 轴 , 它的进给速度和主轴也是相似的 , 速度不会恒定 , 所以两者不可能配合得天衣无缝。
这也就是当采用这种方式攻丝时 , 必须配用带有弹簧伸缩装置的夹头 , 用它来补偿 Z 轴进给与主轴转角运动产生的螺距误差。
如果我们仔细观察上述攻丝过程 , 就会明显地看到 , 当攻丝到底 ,Z 轴停止了而主轴没有立即停住 ( 惯量 ), 攻丝弹簧夹头被压缩一段距离 , 而当 Z 轴反向进给时 , 主轴正在加速 , 弹簧夹头被拉伸 , 这种补偿弥补了控制方式不足造成的缺陷 , 完成了攻丝的加工。
对于精度要求不高的螺纹孔用这种方法加工尚可以满足要求 , 但对于螺纹精度要求较高 ,6H 或以上的螺纹以及被加工件的材质较软 ( 铜或铝 ) 时 , 螺纹精度将不能得到保证。
还有一点要注意的是 , 当攻丝时主轴转速越高 ,Z 轴进给与螺距累积量之间的误差就越大 , 弹簧夹头的伸缩范围也必须足够大 , 由于夹头机械结构的限制 , 用这种方式攻丝时 , 主轴转速只能限制在 600r/min 以下。
刚性攻丝
两种攻丝方式的比较以前的加工中心为了攻丝,一般都是根据所选用的丝锥和工艺要求,在加工程序中编入一个主轴转速和正/反转指令,然后再编人G84/G74固定循环,在固定循环中给出有关的数据,其中Z轴的进给速度是根据F=丝锥螺距×主轴转速得出,这样才能加工出需要的螺孔来。
虽然从表面上看主轴转速与进给速度是根据螺距配合运行的,但是主轴的转动角度是不受控的,而且主轴的角度位置与Z轴的进给没有任何同步关系,仅仅依靠恒定的主轴转速与进给速度的配合是不够的。
主轴的转速在攻丝的过程中需要经历一个停止-正转-停止-反转-停止的过程,主轴要加速-制动-加速-制动,再加上在切削过程中由于工件材质的不均匀,主轴负载波动都会使主轴速度不可能恒定不变。
对于进给Z轴,它的进给速度和主轴也是相似的,速度不会恒定,所以两者不可能配合得天衣无缝。
这也就是当采用这种方式攻丝时,必须配用带有弹簧伸缩装置的夹头,用它来补偿Z轴进给与主轴转角运动产生的螺距误差。
如果我们仔细观察上述攻丝过程,就会明显地看到,当攻丝到底,Z轴停止了而主轴没有立即停住(惯量),攻丝弹簧夹头被压缩一段距离,而当Z轴反向进给时,主轴正在加速,弹簧夹头被拉伸,这种补偿弥补了控制方式不足造成的缺陷,完成了攻丝的加工。
对于精度要求不高的螺纹孔用这种方法加工尚可以满足要求,但对于螺纹精度要求较高,6H或以上的螺纹以及被加工件的材质较软(铜或铝)时,螺纹精度将不能得到保证。
还有一点要注意的是,当攻丝时主轴转速越高,Z轴进给与螺距累积量之间的误差就越大,弹簧夹头的伸缩范围也必须足够大,由于夹头机械结构的限制,用这种方式攻丝时,主轴转速只能限制在600r/min以下。
刚性攻丝就是针对上述方式的不足而提出的,它在主轴上加装了位置编码器,把主轴旋转的角度位置反馈给技控系统形成位置闭环,同时与Z轴进给建立同步关系,这样就严格保证了主轴旋转角度和Z轴进给尺寸的线生比例关系。
因为有了这种同步关系,即使由于惯量、加减速时间常数不同、负载波动而造成的主轴转动的角度或Z轴移动的位置变化也不影响加工精度,因为主轴转角与Z轴进给是同步的,在攻丝中不论任何一方受干扰发生变化,则另一方也会相应变化,并永远维持线性比例关系。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
FANUC 0I Series
主轴 JA7B 放大器模块 JA7A (SPM)
主轴 JA7B 放大器模块
(SPM)
主轴电机
第一主轴
主轴电机
第二主轴
版 01 年 9 月 10 日
設計 侯 长合
名
称
図
提
番
出
北京发那科机电有限公司 页
3. 刚性攻丝相关的控制信号
(1) 信号地址
1) 输入信号(PMC → CNC)
#7
#6
#5
#4
#3
#2
#1
#0
ENB
SF
GR3O GR2O GR1O
ENB2
RGSPM RGSPP
RTPT
RTAP
(2) 信号的意义
1) 刚性攻丝信号 RGTAP <输入信号>
2) 主轴旋转方向信号 RGSPM,RGSPP
3) 刚性攻丝处理中信号 RTAP
4) 齿轮选择信号 GR3O,GR2O,GR1O
在高速排削攻丝循环时,回退值
刚性攻丝同步误差范围设定
○
刚性攻丝主轴侧的齿数(一档)
刚性攻丝主轴侧的齿数(二档)
上不同的时序要求可以参考 FANUC 的连接说明书功能手册(B-63503C-01)的 471-482 页。
5. 刚性攻丝 PMC 的梯形图的实现
版 01 年 9 月 10 日
設計 侯 长合
名
称
図
提
番
出
北京发那科机电有限公司 页
MF F7.0
SUB25 DECB
0002 F010 0000 R100
提
番
出
北京发那科机电有限公司 页
1. 概要
在刚性攻丝时,主轴旋转一转所对应钻孔轴的进给量必须和攻丝的螺距相等,即必须满足如下的条件: P= F/S, P:攻丝的螺距 (mm) F:钻孔轴的进给量 (mm/min) S:主轴的速度 (rpm)
在攻丝循环时G74/G84 (M 系列), G84/G88 (T 系列),主轴的旋转和Z轴的进给量是分别控制的,主轴和进 给轴的加/减速也是独立处理的,所以不能够严格地满足以上的条件,特别是攻丝到达孔的底部时,主轴和进给 轴减速到停止,之后又加速反向旋转过程时,满足以上的条件将更加困难。所以,一般情况下,攻丝是通过在 刀套内安装柔性弹簧补偿进给轴的进给来改善攻丝的精度的。而刚性攻丝循环时,主轴的旋转和进给轴的进给 之间总是保持同步。也就是说,在刚性攻丝时,主轴的旋转不仅要实现速度控制,而且要实行位置的控制。主 轴的旋转和钻孔轴的进给要实现直线插补,在孔底加工时的加/减速仍要满足以下的条件以提高刚性攻丝的精 度。
CNC
主轴 放大器
模块 (SPM)
JY2
内装 MZ 传感器 主轴电机
齿轮比
m:n 皮带或同步带 连接
主轴
位置和速度反馈
(2) 使用 Alpha C 系列主轴电机时
CNC
主轴 放大器
模块 (SPMC)
JY4
(3) 当使用双主轴控制时
位置反馈
主轴电机 位置编码器
齿轮比 m:n 皮带或齿轮 连接
主轴
齿轮或同步带 连接 1:1
0002 300
RGTOFTM R121.1 RGTIN R121.2 RGENR R121.4 RGEND
R121.2 RGENR R121.4
RST
RGTOFTM R121.1
R121.3 RGTCAN R120.1
F001.1 SA
F000.6 ALMA
F045.0 RGTCAN
R120.1 M03R
FANUC 0i-MA 刚性攻丝功能的实现 (Rigid Tapping)
目录
1. 概要 2. 系统的配置 3. 刚性攻丝相关的控制信号 4. 刚性攻丝控制的时序 5. 刚性攻丝 PMC 的梯形图的实现 6. 刚性攻丝的有关参数 7. 诊断维修和调试
版 01 年 9 月 10 日
設計 侯 长合
名
称
図
F070.5
G070.4 F045.1 R123.1
G062.6
G062.6 RTPT
RTNT
RTNTA
F066.1 RGNTA R123.3
G062.6
TMRB SUB24
0001 300
R123.3 RGNCAN
R123.1
刚性攻丝回退条件检查
刚性攻丝回退状态保持 刚性攻丝回退启动单上升沿脉冲 刚性攻丝回退控制输出 刚性攻丝回退完成条件 刚性攻丝回退完成结束
X005.3 RTNTM
R123.1
R124.3
R124.3. RTNTM RTNTD
RGNOI
RTNTR
R124.3 RTNTM
R124.1 RGNOI
R124.0
R123.2 RTNTD
R124.3 RTNTR
R124.0 SFRA
SRVA
SSTA RGNCAN
R124.1 RTNT
R123.2 RTNT
TFIN G399.0
SFIN R299.0
MF F007.0
TF F007.2
SF F007.3
MF F007.0 MFIN R199.0
TF F007.2 TFIN R399.0
SF F007.2 SFIN R299.0
FIN G004.3
版 01 年 9 月 10 日
設計 侯 长合
名
称
図
提
番
出
在刚性攻丝中,进给保持和单程序段信号是否有效
在多主轴控制时,用于选择刚性攻丝的主轴选择信号
刚性攻丝时,是否使用平滑控制
刚性攻丝时,切削时间常数的选择
启动攻丝攻丝时,是否执行主轴准停
在诊断画面中,攻丝同步误差/主轴与攻丝轴的差值
攻丝方式的 M 代码(255 以下时)
在刚性攻丝返回时的倍率值
攻丝方式的 M 代码(255 以上时)
SFRW R122.0 SFRA G070.5 SFRA G070,5 SRVA G070.4 SFRA G070.5
RGTAPM RTONTM G061.0 R121.0 SARA F045.3
SRVA G070.4
MF F007.0
SFRA G070.5
SRVA G070.4 MFIN R199.0
版 01 年 9 月 10 日
設計 侯 长合
名
称
図
提
番
出
北京发那科机电有限公司 页
6. 刚性攻丝的有关参数
参数号 5200#0
符号 G84
5200#1
VGR
5200#2 5200#3 5200#4 5200#5 (M) 5200#6 5200#7 (T) 5201#0 (M) 5201#2 (T) 5202#0 (M) 5204#0 5210 5211 5212 5213 (M) 5214 5221 5222 5223 5224 5231 5232 5233 5234 5241 5242 5243 5244 5261 5262 5263 5264 5271 5272 5273 5274 5280 5281 5282 5283 5284 5291 5292 5293 5294
MF F7.0
SUB25 DECB
0002 F010 0016 R102
#7 #6 #5 #4 #3 #2 #1 #0 R102 M23 M22 M21 M20 M19 M18 M17 M16
MF F7.0
SUB25 DECB
0002 F010 0024 R103
#7 #6 #5 #4 #3 #2 #1 #0 R103 M31 M30 M29 M28 M27 M26 M25 M24
1) 使用主轴位置编码器构成的结构
CNC
主轴 放大器
模块 (SPM)
速度反馈 主轴电机
齿轮比
m:n 皮带或齿轮 连接
JY4 JY2 位置反馈
位置编码器
主轴
齿轮或同步带 连接 1:1 1:2 1:4 1:8
版 01 年 9 月 10 日
設計 侯 长合
名
称
図
提
番
出
北京发那科机电有限公司 页
2) 使用内装 MZ 传感器的主轴电机(包括使用内装主轴电机的场合)
G027 G028 G029 G061 G062 G070
#7
#6
PC2SLC
#5
#4
#3
#2
*SSTP2 *SSTP1
GR2
RTNT SFRA
RGTSP2 RGSP1
CTH1A
CTH2A
#1 SWS2 GR1
#0 SWS1
GR21 RGTAP
2) 输出信号(CNC → PMC)
F001 F007 F034 F038 F065 F066 F076
P = F/S 攻丝的螺距可以直接指定。 刚性攻丝可以通过以下的任何一种指令完成: _ M29 S _____ 刚性攻丝指令在G74/G84 (M series) 或 G84/G88 (T series)之前指定 _ M29 S _____ 刚性攻丝指令与攻丝指令G74/G84(M series) 或 G84/G88 (T series)在同一程序段 _ G74/G84 (M series) 或 G84/G88 (T series) 作为刚性攻丝指令(使用G74/G84 (G84/G88)作为刚性攻丝指
設計 侯 长合
名
称
図
提
番
出
北京发那科机电有限公司 页
编程的指令方式
换档
铣床
1 在 G84(G74)之前指定3 M29 和 G84(G74)指定在同一程序段 4