设定参数实现刚性攻丝
FANUC设定参数实现刚性攻丝

FANUC设定参数实现刚性攻丝(大连机床集团有限责任公司黄贤鸿)1 两种攻丝方式的比较以前的加工中心为了攻丝, 一般都是根据所选用的丝锥和工艺要求, 在加工程序中编入一个主轴转速和正/ 反转指令, 然后再编人G84 /G74 固定循环, 在固定循环中给出有关的数据, 其中Z 轴的进给速度是根据F=丝锥螺距×主轴转速得出, 这样才能加工出需要的螺孔来。
虽然从表面上看主轴转速与进给速度是根据螺距配合运行的, 但是主轴的转动角度是不受控的, 而且主轴的角度位置与Z 轴的进给没有任何同步关系, 仅仅依靠恒定的主轴转速与进给速度的配合是不够的。
主轴的转速在攻丝的过程中需要经历一个停止-正转-停止-反转-停止的过程, 主轴要加速-制动-加速-制动, 再加上在切削过程中由于工件材质的不均匀, 主轴负载波动都会使主轴速度不可能恒定不变。
对于进给Z 轴, 它的进给速度和主轴也是相似的, 速度不会恒定, 所以两者不可能配合得天衣无缝。
这也就是当采用这种方式攻丝时, 必须配用带有弹簧伸缩装置的夹头, 用它来补偿Z 轴进给与主轴转角运动产生的螺距误差。
如果我们仔细观察上述攻丝过程, 就会明显地看到, 当攻丝到底,Z 轴停止了而主轴没有立即停住(惯量), 攻丝弹簧夹头被压缩一段距离, 而当Z 轴反向进给时, 主轴正在加速, 弹簧夹头被拉伸, 这种补偿弥补了控制方式不足造成的缺陷, 完成了攻丝的加工。
对于精度要求不高的螺纹孔用这种方法加工尚可以满足要求, 但对于螺纹精度要求较高,6H 或以上的螺纹以及被加工件的材质较软(铜或铝) 时, 螺纹精度将不能得到保证。
还有一点要注意的是, 当攻丝时主轴转速越高,Z 轴进给与螺距累积量之间的误差就越大, 弹簧夹头的伸缩范围也必须足够大, 由于夹头机械结构的限制, 用这种方式攻丝时, 主轴转速只能限制在600r/min 以下。
刚性攻丝就是针对上述方式的不足而提出的, 它在主轴上加装了位置编码器, 把主轴旋转的角度位置反馈给技控系统形成位置闭环, 同时与Z 轴进给建立同步关系, 这样就严格保证了主轴旋转角度和Z 轴进给尺寸的线生比例关系。
刚性攻丝回退案例介绍
刚性攻丝回退案例介绍刚性攻丝回退案例介绍功能介绍刚性攻丝是加⼯常⽤功能,在攻丝过程中,由于⼯件装卡精度或者加⼯程序编写等原因,断锥现象是⽐较常见的。
为了尽量避免此问题发⽣,客户期望通过检测主轴负载,在攻丝时,⼀旦负载异常,中断刚性攻丝循环,执⾏刚性攻丝返回动作。
本次功能测试在国内某客户处完成,测试系统为FANUC 0i mate-MD。
刚性攻丝回退(功能说明书中该功能命名为“刚性攻丝返回”)功能可以在复位操作,中断刚性攻丝时,通过PMC信号或者指令,执⾏刚性攻丝回退动作,将攻丝轴退回到R点位置,回退过程依然保持最近⼀次刚性攻丝同步位置关系。
需要注意的是,该功能在0i-TD与31i系统上均为选项功能,0i-TD系统功能诊断号为1174#2,31i系统诊断号为1163#6,可以通过以上诊断号确认系统是否具有此功能。
功能实现刚性攻丝回退功能既可以通过PMC信号触发,也可通过指令执⾏,只需要利⽤参数即可进⾏切换。
使⽤PMC信号触发刚性攻丝回退,必须在MDI⽅式下,⽆法满⾜客户在MEM⽅式下的需求,因此本次调试将参数RG3设定为1,使⽤G30进⾏指令。
根据客户描述,初步考虑通过以下两种⽅案实现其需求:(1)利⽤中断型⽤户宏程序通过G30指令执⾏刚性攻丝回退动作,利⽤中断型⽤户宏程序功能,将刚性攻丝回退程序编写⼊宏程序中,在攻丝过程时,遇到主轴负载异常检测信号时,中断刚性攻丝循环,调⽤刚性攻丝回退宏程序,实现客户需求。
实验测试过程中,发现中断型⽤户宏程序在刚性攻丝循环中⽆效,确认功能说明,该功能对复合型固定循环⽆效。
即会出现如下现象:导通中断型⽤户宏程序信号后,刚性攻丝动作继续执⾏,循环结束后才可以执⾏所调⽤的宏程序。
因此可判断该⽅案不可⾏。
(2)利⽤外部⼯件号检索外部⼯件号检索功能通过PMC信号,检索预先在程序存储器中存储的程序,检测到⾃动循环启动信号下降沿后执⾏该程序。
当检测到攻丝轴异常负载时,通过外部复位信号(G8.7)中断刚性攻丝循环,停⽌攻丝动作,复位完成后利⽤外部⼯件号检索功能,调⽤刚性攻丝回退程序并执⾏,通过实验测试,实现客户描述的需求,⽅案可⾏。
模拟主轴刚性攻丝
◇ 北京发那科机电有限公司技术交流会资料 ◇ 请勿复制或传播 ◇
-7-
相关信号处理 相关信号处理
三、相关信号处理
刚性攻丝 译码信号 主轴零速信号I3
给系统刚性攻丝信号 给变频器刚性攻丝使能I4 选择第二档主轴转速
◇ 北京发那科机电有限公司技术交流会资料 ◇ 请勿复制或传播 ◇
-8-
相关信号处理 相关信号处理
1、系统模拟量的输出(JA40 口)
双极性接线方式 此接线方式为双极性方式。数控系统采用双极性(-10V~+10V)模 拟量输出,转速由模拟量的值决定,转向由模拟量极性决定。( 3706#7=1, 3706#6=0: M03 为正,M04 为负 )
◇ 北京发那科机电有限公司技术交流会资料 ◇ 请勿复制或传播 ◇ -5-
三、相关信号处理
给主轴使能I0
◇ 北京发那科机电有限公司技术交流会资料 ◇ 请勿复制或传播 ◇
-9-
参数设置 参数设置
四、参数设置
1、测量调整主轴模拟输出的增益数据和偏置电压的补偿量 (1) 执行S0;使用万用表测量JA40端口的5 ,7 脚,查看是否为0V,如 有偏差修改NO.3731=-8191*偏置电压/12. 5 (2) 执行Smax ;使用万用表测量JA40端口的5 ,7 脚,查看是否为 10V ,如有偏差修改NO.3730=10*1000/测量电压 本例中最终设定NO.3730=1000,NO.3731=100.
硬件连接介绍 硬件连接介绍
二、硬件连接
2、主轴位置编码器
JA41口主轴位置编码器反馈接线
◇ 北京发那科机电有限公司技术交流会资料 ◇ 请勿复制或传播 ◇
-6-
硬件连接介绍 硬件连接介绍
Байду номын сангаас二、硬件连接
刚性攻丝参数
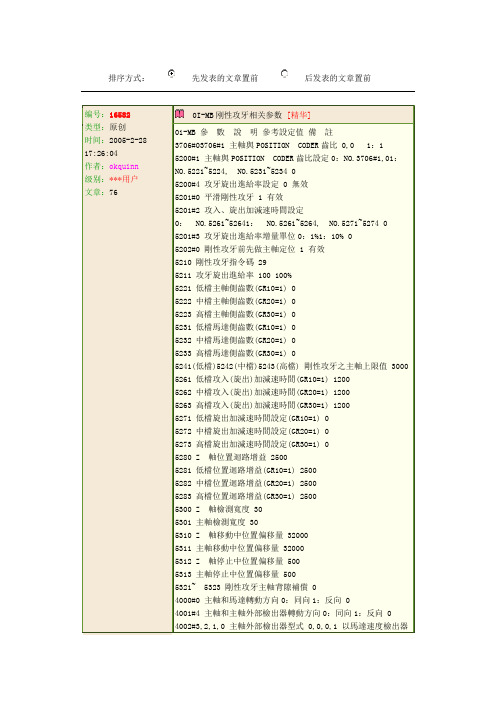
排序方式:先发表的文章置前后发表的文章置前 0I-MB参数号符号说明3#6,#7 PSG* 主轴与位置编码器的齿轮比64#6,#7 P2SG* 第二主轴与第二位置编码器的齿轮比13#5 ORCW 定向时,S模拟输出极性正/负13#6,#7 TCW,CWM S模拟输出的极性24#2 SCTO 不检测/检测主轴速度到达信号(G120#4 SAR)49#2 CHKSP SIND为1时,主轴速度漂移检测无效/有效65#1 CZRN 方式切换至Cs轮廓控制方式后,执行回零后的第一个G00指令执行定位/执行普通定位70#0,#! DAC* 对于D/A转换,模拟接口板未使用/使用71#0 ISRLPC 使用一个串行主轴时,位置编码器信号通过光缆接收/通过M27接口接收71#2 SRLMSP 多主轴控制中,第二主轴为模拟的/串行的71#3 SSMPC M27/第二主轴控制单元用作第二位置编码器接口71#4 SRL2SP 连接一个/两个串行主轴接口71#7 FSRSP 串主轴未使用/被使用行74#7 PLCREV 位置编码器的反馈信号代表绝对值/带方向的脉冲80#2,#3 MORCM* 对于第一,第二主轴电机,外部设定停止位置的主轴定向功能未使用/已使用381#7 IGNSIC 刀架2连接串行/模拟主轴397#0 SPLME 主轴速度偏移检测功能的允许比例为1% / 0.1%108 SPLOW 主轴恒定速度给定或主轴换档速度给定110 SCTTIM 检测主轴速度到达信号的延迟时间(G120#4 SAR)516 PSANGN 恒线速控制时的调整增益(S4/S5位数模拟主轴)531 SPALW 主轴速度偏移检测中确定是否达到主轴速度的允许比例532 SPLMT 主轴速度偏移检测中确定是否发出报警的主轴速度偏移率539 SPDLC 主轴速度偏移值540~543 GRMX1~4 对应于各档指令电压为10V时的主轴速度546 DRFT3 Cs轴伺服环中发生的漂移补偿值551 LOWSP (G96)恒线速控制中的最低速限制556 SCLMP 恒线速控制中的最高速限制564 SPWDTH 主轴速度漂移检测中不引起报警的允许漂移范围576 简易主轴同步控制方式中两主轴间的允许误差脉冲数580~583 SLPGM1~4 Cs控制方式中各档的主轴伺服环增益584 SLPGIN 主轴环增益585 SRPDFL 主轴快速进给时的F0倍率586 SZRNFL 主轴定向时的FL速度587 MORT 指定主轴定向的M代码588 MRELS 取消主轴定向的M代码712 SPTIME 启动主轴速度漂移检测的时间6780~6783 Cs轮廓控制方式中伺服轴的位置环增益6784~6787 (X)Cs轮廓控制方式中各档的位置环增益6788~6791 (Y)Cs轮廓控制方式中各档的位置环增益6792~6795 (Z)Cs轮廓控制方式中各档的位置环增益6796~6799 (4)Cs轮廓控制方式中各档的位置环增益6501#7 执行主轴自动参数设定6633 主轴电机ID代码6501#2 使用主轴位置编码器6503#0 使用内装主轴编码器参数号符号说明60#0 DADRDP 诊断画面中是否显示地址X,Y,G,F,R,D。
FANUC系统数控加工中心刚性攻丝时的参数设定
在 FANUC 0i等数控 系统 中对刚性攻 丝 的处理 设置 了 3 种指令 模式 ,即 :①在 G84(攻丝 循环 )之前 由 M29 S X××X 指令 ;② 在 G84同一段 中 ,由 M29 S X×××指令 ;③不 用 M 代码 ,而直接 由 G84来指令 。但 不论 是哪种方式进行 刚性攻 丝 ,都必须具备最基本 的 3个 条件 :
(3)合 羽{凸 数。根据 主轴不 同传动结构 ,涉及刚性攻
【作者 简 介 】丁海萍(1979一),男,研究生,讲师,研究方向:机械制造及其自动化。 41
丝的参数是很多的。要合理设定这些参数 ,了解参 数的意义是 必要 的 ,并要抓住要害才能达到事半功倍 的效果 。本 文着重说 明各种参数 的具体含义 。
2010年 9月 第 9期 (总第 142期 )
广 西 轻 工 业 GUANGxIJ0uRNAL oF LIGHT lNDusTRY
机 械 与 电 气
F A N U C 系统 数 控加 工 中心 刚性 攻 丝 时的参 数设 定
丁 海 萍 ,杨 晶
(南通 职 业大学数 控 中心 ,江 苏 南通 226007)
【中图分类号 】TG659 【文献标识码 】 B
【文章编号 】 1003—2673(2010)09—41—02
1 引言 刚性攻丝功能 以高速高效 高精度 加工螺纹 而被越 来越多
的机 床用 户所青睐 ,因此调试好此功能 ,使其达 到高速高精度 的性 能 ,以满足用户广泛的 ̄JnY-需求是很有 必要 的,对于精度 要求高的深孔 ,应通过选用合适 的攻 丝方法和合理设置数控系 统参数等手段来实现。目前 刚性攻丝 已经成 为加工 中心不可缺 少 的一项主要功能。
刚性攻丝
两种攻丝方式的比较以前的加工中心为了攻丝,一般都是根据所选用的丝锥和工艺要求,在加工程序中编入一个主轴转速和正/反转指令,然后再编人G84/G74固定循环,在固定循环中给出有关的数据,其中Z轴的进给速度是根据F=丝锥螺距×主轴转速得出,这样才能加工出需要的螺孔来。
虽然从表面上看主轴转速与进给速度是根据螺距配合运行的,但是主轴的转动角度是不受控的,而且主轴的角度位置与Z轴的进给没有任何同步关系,仅仅依靠恒定的主轴转速与进给速度的配合是不够的。
主轴的转速在攻丝的过程中需要经历一个停止-正转-停止-反转-停止的过程,主轴要加速-制动-加速-制动,再加上在切削过程中由于工件材质的不均匀,主轴负载波动都会使主轴速度不可能恒定不变。
对于进给Z轴,它的进给速度和主轴也是相似的,速度不会恒定,所以两者不可能配合得天衣无缝。
这也就是当采用这种方式攻丝时,必须配用带有弹簧伸缩装置的夹头,用它来补偿Z轴进给与主轴转角运动产生的螺距误差。
如果我们仔细观察上述攻丝过程,就会明显地看到,当攻丝到底,Z轴停止了而主轴没有立即停住(惯量),攻丝弹簧夹头被压缩一段距离,而当Z轴反向进给时,主轴正在加速,弹簧夹头被拉伸,这种补偿弥补了控制方式不足造成的缺陷,完成了攻丝的加工。
对于精度要求不高的螺纹孔用这种方法加工尚可以满足要求,但对于螺纹精度要求较高,6H或以上的螺纹以及被加工件的材质较软(铜或铝)时,螺纹精度将不能得到保证。
还有一点要注意的是,当攻丝时主轴转速越高,Z轴进给与螺距累积量之间的误差就越大,弹簧夹头的伸缩范围也必须足够大,由于夹头机械结构的限制,用这种方式攻丝时,主轴转速只能限制在600r/min以下。
刚性攻丝就是针对上述方式的不足而提出的,它在主轴上加装了位置编码器,把主轴旋转的角度位置反馈给技控系统形成位置闭环,同时与Z轴进给建立同步关系,这样就严格保证了主轴旋转角度和Z轴进给尺寸的线生比例关系。
因为有了这种同步关系,即使由于惯量、加减速时间常数不同、负载波动而造成的主轴转动的角度或Z轴移动的位置变化也不影响加工精度,因为主轴转角与Z轴进给是同步的,在攻丝中不论任何一方受干扰发生变化,则另一方也会相应变化,并永远维持线性比例关系。
柔性攻丝与刚性攻丝的区别
柔性攻丝与刚性攻丝的区别刚性就是说攻丝的刀柄是刚性的没有自动调整间隙的,而柔性的是有调整间隙的一般的是带弹簧延轴线有弹性收缩功能的。
对于数控机床而言:柔性攻丝是指不带编码器(C轴编码器)是:用通过编计算控制螺距的攻丝的如G81、CYCLE840列:CYCLE840(30,0,5,-25,,,4,3,1,,,3,1,0)刚性攻丝是指带编码器攻丝(C轴编码器)是:C轴每转一圈走一个螺距,用固定指令CYCLE84、G331。
国内的目前刚性攻丝的应该不多,大部分都是柔性攻丝,因为咱们的丝锥的原因,老外的丝锥用过一段时间后就不用了,咱们的是用到不能用(或者是断到孔里了),主要是怕花钱,觉得好好的丝锥怎么用了才几次就扔了,觉得可惜,这样刚性攻丝的话很容易就断。
刚、柔攻丝的最大的区别在于夹持丝攻的夹具。
设定参数实现刚性攻丝一般都是根据所选用的丝锥和工艺要求,在加工程序中编入一个主轴转速和正/反转指令,然后再编入G84/G74固定循环,在固定循环中给出有关的数据,其中Z轴的进给速度是根据F=丝锥螺距×主轴转速得出,这样才能加工出需要的螺孔来。
虽然从表面上看主轴转速与进给速度是根据螺距配合运行的,但是主轴的转动角度是不受控的,而且主轴的角度位置与Z轴的进给没有任何同步关系,仅仅依靠恒定的主轴转速与进给速度的配合是不够的。
主轴的转速在攻丝的过程中需要经历一个停止-正转-停止-反转-停止的过程,主轴要加速-制动-加速-制动,再加上在切削过程中由于工件材质的不均匀,主轴负载波动都会使主轴速度不可能恒定不变。
对于进给Z轴,它的进给速度和主轴也是相似的,速度不会恒定,所以两者不可能配合得天衣无缝。
这也就是当采用这种方式攻丝时,必须配用带有弹簧伸缩装置的夹头,用它来补偿Z轴进给与主轴转角运动产生的螺距误差。
如果我们仔细观察上述攻丝过程,就会明显地看到,当攻丝到底,Z 轴停止了而主轴没有立即停住(惯量),攻丝弹簧夹头被压缩一段距离,而当Z轴反向进给时,主轴正在加速,弹簧夹头被拉伸,这种补偿弥补了控制方式不足造成的缺陷,完成了攻丝的加工。
FANUC系统攻丝

不用设计梯形图实现刚性攻丝 在 FANUC Oi 数控系统里 , 参数 N0.5200#0 如果被设定为 0, 那么刚性攻丝就需要用 M 代码指定。一般情况 下 , 我们都使用 M29, 而在梯形图中也必须设计与之相对应的顺序程序 , 这对初次尝试者来说还有一定的困难。 正常的情况下 , 没有特殊要求时 , 主轴参数初始化后把参数 No.5200#0 设定为 1, 其它有关参数基本不动 , 也不用增加任何新的控制程序 , 这样就简单多了。在运行调试中要根据机床本身的机械特性设置刚性攻丝必须的一组参数 (见表 l) 。参数设置好后就可以直接使用固定循环 G84/G74 指令编程 , 其格式举例如下 :
通过诊断452和453更为直接
其次可以通过修改4065~4068 标准值为1000
不要过小,不然攻丝时会没有力量.
FANUC 0IMD系统
F=S*螺距
比如功M10 底孔8.5 螺距1.5 (公制)
M03S100
M29 S150
G98 G90 G84 X0.0 Y0.0 Z-40. R2 Q2. F150 K0
三菱的系统比较简单,进给和主轴转速是随机的。
如:攻M10 底孔8.5 螺距1.5 (公制)
楼主提供的参数非常详细,只是这些参数要在实际的加工过程中根据实际情况具体设定.
如果要实现较好的螺纹切削精度,一定要在诊断画面里看452,453位置误差量的百分比是多少
应该控制在30以内,或者看诊断的455到457同步误差的量,尽量的小而相同.
5204#0 为0时可以看到455~457
5204#0 为1时可以看到452,453
M3 Sl000; 主轴正转(1000r/min)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
设定参数实现刚性攻丝
(大连机床集团有限责任公司黄贤鸿)
1 两种攻丝方式的比较
以前的加工中心为了攻丝 , 一般都是根据所选用的丝锥和工艺要求 , 在加工程序中编入一个主轴转速和正 /反转指令 , 然后再编人 G84/G74 固定循环 , 在固定循环中给出有关的数据 , 其中 Z 轴的进给速度是根据 F =丝锥螺距×主轴转速得出 , 这样才能加工出需要的螺孔来。
虽然从表面上看主轴转速与进给速度是根据螺距配合运行的 , 但是主轴的转动角度是不受控的 , 而且主轴的角度位置与 Z 轴的进给没有任何同步关系 , 仅仅依靠恒定的主轴转速与进给速度的配合是不够的。
主轴的转速在攻丝的过程中需要经历一个停止-正转-停止-反转-停止的过程 , 主轴要加速-制动-加速-制动 , 再加上在切削过程中由于工件材质的不均匀 , 主轴负载波动都会使主轴速度不可能恒定不变。
对于进给 Z 轴 , 它的进给速度和主轴也是相似的 , 速度不会恒定 , 所以两者不可能配合得天衣无缝。
这也就是当采用这种方式攻丝时 , 必须配用带有弹簧伸缩装置的夹头 , 用它来补偿 Z 轴进给与主轴转角运动产生的螺距误差。
如果我们仔细观察上述攻丝过程 , 就会明显地看到 , 当攻丝到底 ,Z 轴停止了而主轴没有立即停住 ( 惯量 ), 攻丝弹簧夹头被压缩一段距离 , 而当 Z 轴反向进给时 , 主轴正在加速 , 弹簧夹头被拉伸 , 这种补偿弥补了控制方式不足造成的缺陷 , 完成了攻丝的加工。
对于精度要求不高的螺纹孔用这种方法加工尚可以满足要求 , 但对于螺纹精度要求较高 ,6H 或以上的螺纹以及被加工件的材质较软 ( 铜或铝 ) 时 , 螺纹精度将不能得到保证。
还有一点要注意的是 , 当攻丝时主轴转速越高 ,Z 轴进给与螺距累积量之间的误差就越大 , 弹簧夹头的伸缩范围也必须足够大 , 由于夹头机械结构的限制 , 用这种方式攻丝时 , 主轴转速只能限制在 600r/min 以下。
刚性攻丝就是针对上述方式的不足而提出的 , 它在主轴上加装了位置编码器 , 把主轴旋转的角度位置反馈给技控系统形成位置闭环 , 同时与 Z 轴进给建立同步关系 , 这样就严格保证了主轴旋转角度和 Z 轴进给尺寸的线生比例关系。
因为有了这种同步关系 , 即使由于惯量、加减速时间常数不同、负载波动而造成的主轴转动的角度或 Z 轴移动的位置变化也不影响加工精度 , 因为主轴转角与 Z 轴进给是同步的 , 在攻丝中不论任何一方受干扰发生变化 , 则另一方也会相应变化 , 并永远维持线性比例关系。
如果我们用刚性攻丝加工螺纹孔 , 可以很清楚地看到 , 当 Z 轴攻丝到达位置时 , 主轴转动与 Z 轴进给是同时减速并同时停止的 , 主轴反转与 Z 轴反向进给同样保持一致。
正是有了同步关系 , 丝锥夹头就用普通的钻夹头或更简单的专用夹头就可以了 , 而且刚性攻丝时 , 只要刀具 ( 丝锥 ) 强度允许 , 主轴的转速能提高很多 ,4 000r/min 的主轴速度已经不在话下。
加工效率提高 5 倍以上, 螺纹精度还得到保证 , 目前已经成为加工中心不可缺少的一项主要功能。
2 刚性攻丝功能的实现
从电气控制的角度来看 , 数控系统只要具有主轴角度位置控制和同步功能 , 机床就能进行刚性攻丝 , 当然还需在机床上加装反馈主轴角度的位置编码器。
要正确地反映主轴的角度位置 , 最好把编码器与主轴同轴联接 , 如果限于机械结构必需通过传动链联接时 , 要坚持 1:1 的传动比 , 若用皮带 , 则非同步带不可。
还有一种可能 , 那就是机床主轴和主轴电动机之间是直连 , 可以借用主轴电动机本身带的内部编码器作主轴位置反馈 , 节省二项开支。
除去安装必要的硬件外 , 主要的工作是梯形图控制程序的设计调试。
市面上有多种数控系统 , 由于厂家不同 , 习惯各异 , 对刚性攻丝的信号安排和处理是完全不一样的。
我们曾经设计和调试过几种常用数控系统的刚性攻丝控制程序 , 都比较繁琐。
调试人员不易理解梯形图控制程序 , 特别是第一台样机调试周期长 , 不利于推广和使用。
尽管如此 , 加工中心有了该项功能 , 扩大了加工范围 , 受到用户的青睐。
3 不用设计梯形图实现刚性攻丝
在 FANUC Oi 数控系统里 , 参数 N0.5200#0 如果被设定为 0, 那么刚性攻丝就需要用 M 代码指定。
一般情况下 , 我们都使用 M29, 而在梯形图中也必须设计与之相对应的顺序程序 , 这对初次尝试者来说还有一定的困难。
正常的情况下 , 没有特殊要求时 , 主轴参数初始化后把参数 No.5200#0 设定为 1, 其它有关参数基本不动 , 也不用增加任何新的控制程序 , 这样就简单多了。
在运行调试中要根据机床本身的机械特性设置刚性攻丝必须的一组参数 (见表l) 。
参数设置好后就可以直接使用固定循环 G84/G74 指令编程 , 其格式举例如下 :
表 1 刚性攻丝参数表
功能
参数
攻丝最高主轴转速
N0.5241 - N0.5244
主轴与攻丝轴的时间常数
N0.5261 - No.5264
刚性攻丝轴回路增益
N0.5280 - N0.5284
刚性攻丝时攻丝轴移动位置偏差量的极限值
N0.5310
刚性攻丝时主轴移动位置偏差量的极限值
N0.5311
刚性攻丝时的攻丝轴停止时的位置偏差量极限值
N0.5312
刚性攻丝时的主轴停止时的位置偏差量极限值
N0.5313
(1) 每分钟进给编程
右螺纹
G94; Z 轴每分钟进给
M3 Sl000; 主轴正转(1000r/min)
G9O G84 X-300.Y-250.Z-150.R-120. P300 F1000; 右螺纹攻丝 , 螺距 lmm 左螺纹
G94; Z 轴每分钟进给
M4 Sl000; 主轴反转(1000r/min)
G9O G74 X-300.Y-250.Zl50.R-120.P300 F1000; 左螺纹攻丝 , 螺距 lmm (2) 每转 ( 主轴 ) 进给编程
右螺纹
G95; Z 轴进给 / 主轴每转
M3 S1000; 主轴正转 (1000r/min)
G9O G84 X-300.Y-250.Z-150.R-120. P300 F1.0; 右螺纹攻丝 , 螺距 1mm
右螺纹
G95; Z 轴进给 / 主轴每转
M4 S1000; 主轴反转 (1000r/min)
G90 G74 X-300.Y-250.Z150.R-120. P300 F1.0; 左螺纹攻丝 , 螺距 l mm
以上刚性攻丝编程由于将参数 No.5200#0 设置为 1, 固定循环 G84/ 成为刚性攻丝的指令 , 所以它的编程格式就完全与原固定循环 G84/G74 普通攻丝是一样的。
根据用户的使用调查 , 刚性攻丝性能大大优于普通攻丝。