理论力学 第五章 点的运动学(合)
理论力学--运动学总结

速度瞬心位置的确定总结
瞬时平动
几点注意 1、基点法是速度分析的基本方法;
2、速度投影法 应用起来简单,但必须知道待求速度 点的方位,致命的弱点—是不能求图形的角速度 2、当平面几何简单时,分析速度可采用瞬心法; 瞬心法既可以求某点的速度,也可以求刚体运动 的角速度; 4、确定速度瞬心的速度是该点的绝对运动速度; 5、具体分析时三种方法灵活运用;
(1)刚体的基本运动 平动
v A vB
aA aB
各点的轨迹相同;
可简化为一个点的运动。
定轴转动
v R
a R
an R 2
轮系的传动比:
1 n1 R1 Z 2 i12 2 n2 R2 Z1
各处不打滑时: 接触点有相同的线速度和相同的切向加速度。
(2)刚体的平面运动 1. 定义 任一点到某固定平面的距离保持不变。
B点的加速度分析
D
C
a a 2 a a 2 ae 2 ar 2
n
aa 2 ae 2
O1
30°
ar 2
B
aa 2cos60 aa2cos30 ae 2
n
aa 2
1
30° O2
n
A
a a2 O2 B 2
n 2 aa2 O2 B2
ae2 657mm/ s
2
三、刚体的运动
va=v
vCA
动点:滑块C 动系:固结于AE
u=vA
vr
vC' A
ωAE
分析三种运动
牵连运动:刚体的平面运动
牵连转动
va ( vA vCA ) vr
va cos vCA v A sin
理论力学习题答案
理论力学习题答案(总26页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--2第一章 静力学公理和物体的受力分析一、是非判断题在任何情况下,体内任意两点距离保持不变的物体称为刚体。
( ∨ ) 物体在两个力作用下平衡的必要与充分条件是这两个力大小相等、方向相反,沿同一直线。
( × ) 加减平衡力系公理不但适用于刚体,而且也适用于变形体。
( × ) 力的可传性只适用于刚体,不适用于变形体。
( ∨ ) 两点受力的构件都是二力杆。
( × ) 只要作用于刚体上的三个力汇交于一点,该刚体一定平衡。
( × ) 力的平行四边形法则只适用于刚体。
( × ) 凡矢量都可以应用平行四边形法则合成。
( ∨ ) 只要物体平衡,都能应用加减平衡力系公理。
( × ) 凡是平衡力系,它的作用效果都等于零。
( × ) 合力总是比分力大。
( × ) 只要两个力大小相等,方向相同,则它们对物体的作用效果相同。
( × )若物体相对于地面保持静止或匀速直线运动状态,则物体处于平衡。
( ∨ )当软绳受两个等值反向的压力时,可以平衡。
( × )静力学公理中,二力平衡公理和加减平衡力系公理适用于刚体。
( ∨ )静力学公理中,作用力与反作用力公理和力的平行四边形公理适用于任何物体。
( ∨ )凡是两端用铰链连接的直杆都是二力杆。
( × )如图所示三铰拱,受力F ,F 1作用,其中F 作用于铰C 的销子上,则AC 、BC 构件都不是二力构件。
( × )图3二、填空题力对物体的作用效应一般分为 外 效应和 内 效应。
对非自由体的运动所预加的限制条件称为 约束 ;约束力的方向总是与约束所能阻止的物体的运动趋势的方向 相反 ;约束力由 主动 力引起,且随 主动 力的改变而改变。
理论力学(5.6)--点的运动学-思考题
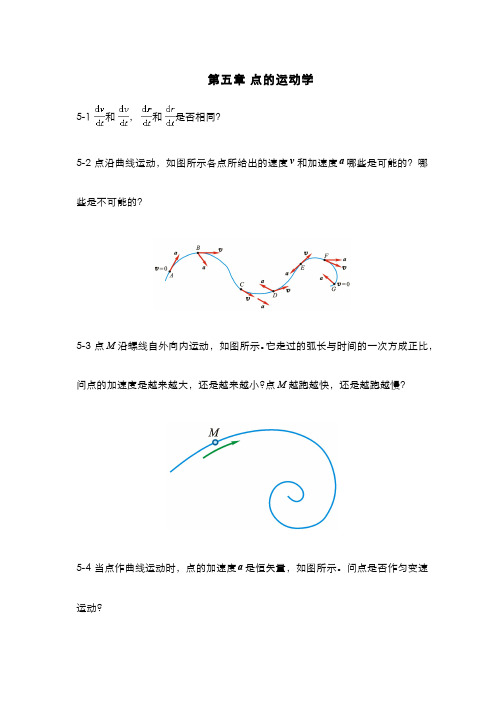
第五章 点的运动学5-1和 , 和 是否相同?5-2点沿曲线运动,如图所示各点所给出的速度v和加速度a哪些是可能的?哪些是不可能的?5-3点M 沿螺线自外向内运动,如图所示。
它走过的弧长与时间的一次方成正比,问点的加速度是越来越大,还是越来越小?点M越跑越快,还是越跑越慢?5-4当点作曲线运动时,点的加速度a是恒矢量,如图所示。
问点是否作匀变速运动?5-5 作曲线运动的两个动点,初速度相同、运动轨迹相同、运动中两点的法向加速度也相同。
判断下述说法是否正确:(1)任一瞬时两动点的切向加速度必相同;(2)任一瞬时两动点的速度必相同;(3)两动点的运动方程必相同。
5-6 动点在平面内运动,已知其运动轨迹)(x f y 及其速度在x 轴方向的分量。
判断下述说法是否正确:(1)动点的速度可完全确定;(2)动点的加速度在x 轴方向的分量可完全确定;(3)当速度在x 轴方向的分量不为零时,一定能确定动点的速度、切向加速度、法向加速度及全加速度。
5-7 下述各种情况,动点的全加速度,切向加速度和法向加速度三个矢量之间有何关系?(1)点沿曲线作匀速运动;(2)点沿曲线运动,在该瞬时其速度为零;(3)点沿直线作变速运动;(4)点沿曲线作变速运动。
5-8 点作曲线运动时,下述说法是否正确:(1)若切向加速度为正,则点作加速运动;(2)若切向加速度与速度的符号相同,则点作加速运动;(3)若切向加速度为零,则速度为常矢量。
5-9 在极坐标系中,ρρ =v ,ρϕϕ =v 分别代表在极径方向与极径垂直方向(极角ϕ的方向)的速度。
但为什么沿这两个方向的加速度为2ϕρρρ -=a ϕρϕρϕ 2+=a 试分析ρa 中2ϕρρ -=a 和ϕa 中的ϕρ 出现的原因和它们的几何意义。
理论力学(机械工业出版社)第五章点的运动学习题解答

习 题5-1 如图5-13所示,偏心轮半径为R ,绕轴O 转动,转角t ωϕ=(ω为常量),偏心距e OC =,偏心轮带动顶杆AB 沿铅垂直线作往复运动。
试求顶杆的运动方程和速度。
图5-13)(cos )sin(222t e R t e y ωω-+=)(cos 2)2sin()[cos(222t e R t e t e yv ωωωω-+==5-2 梯子的一端A 放在水平地面上,另一端B 靠在竖直的墙上,如图5-14所示。
梯子保持在竖直平面内沿墙滑下。
已知点A 的速度为常值v 0,M 为梯子上的一点,设MA = l ,MB = h 。
试求当梯子与墙的夹角为θ时,试点M 速度和加速度的大小。
图5-14A M x hl hh x +==θsin θcos l y M = 0cos v h l h x h l h h xA M +=+== θθ 得 θθcos )(0h l v +=θθθθθt a n)(c o s )(s i n s i n 00h l lv h l v l l yM +-=+⨯-=-= 0=M xθθθθθ322002020cos )(cos )(sec )(sec )(h l lv h l v h l lv h l lv y M +-=+⨯+-=+-=θ3220cos )(h l lv a M+=5-3 已知杆OA 与铅直线夹角6/πt =ϕ( 以 rad 计,t 以s 计),小环M 套在杆OA 、CD 上,如图5-15所示。
铰O至水平杆CD 的距离h =400 mm 。
试求t = 1 s 时,小环M 的速度和加速度。
图5-15ϕtan h x M = ϕϕϕ22sec 6π400sec ⨯== h xM ϕϕϕϕϕϕϕs i n s e c 9π200s i n s e c 6π3π400)s i n s e c 2(6π4003233=⨯⨯=⨯⨯= M x当s 1=t 时6π=ϕmm/s 3.2799π800346π400)6π(sec 6π4002==⨯==Mv 223232mm/s 8.168327π80021)32(9π200)6πsin()6π(sec 9π200==⨯⨯=⨯⨯=Ma5-4 点M 以匀速u 在直管OA 内运动,直管OA 又按t ωϕ=规律绕O 转动,如图5-16所示。
理论力学(第7版)第五章 点的运动学

运 动 规 律
[例5-1 ] 已知点的运动方程为x=2sin 4t m,y=2cos 4t m, z=4t m。 求:点运动轨迹的曲率半径 。
解:
vx x 8 cos 4t , ax 32 sin 4t x
r r t
—以矢量表示的 点的运动方程
矢端曲线:动点M在运动过程中,矢 径r的末端绘出的一条连续曲线。 ——动点M的运动轨迹
3
二.点的速度
dr v r dt
方向:沿着矢径r的矢端曲线的切线 方向,且与此点的运动方向一致。
大小:速度矢的模,表明点运动的快慢。
三.加速度
dv d 2r a r 2 dt dt
dv v2 a a a n a a n n n dt
17
5-3 自然法 曲率(1 / ) :
定义——曲线切线的转角对弧长 一阶导数的绝对值。表示曲线的 弯曲程度。
d lim| | t 0 S dS 1
由于a , an均在密切面内,全加速a必在密切面内。 度
— 与 弧 坐 标 的 正 向 一 致 n — 指 向 曲 线 内 凹 一 侧 b — 与 , n 构 成 右 手 系
b n
[注]:自然坐标系是沿曲 13 线而变动的游动坐标系。
(动画自然坐标轴的几何性质)
曲线在P点的密切面形成
5-3 自然法
二.点的速度
当t 0时,r MM' S
v y y 8 sin 4t , a y 32 cos 4t y
v z z 4, a z 0 z
2 2 2 2 v v x v 2 v z 80 m s , a a x a 2 a z 32m s 2 y y
理论力学基础点的合成运动

1
平动和转动的区别
2
它们之间的关系对于理解合成运动具有
重要意义;
3
运动学基本公式
4
位置、速度、加速度等运动学基本公式 是研究合成运动的基础知识。
牛顿第二定律
合力产生加速度,加速度与力成正比。 一切合成运动都符合牛顿第二定律;
匀速圆周运动的分解
它是所有曲线合成运动的基础,掌握分 解方法可以为其他曲线合成运动的研究 提供启示;
结论和总结
合成运动是力学基础点之一,但不同于其他运动,它是由多个运动步骤组 成的复杂过程,因此有其独特的研究方法和工具。对合成运动理论及其实 际应用的深度理解和掌握,具有重要意义。 ——陈晓明,中国科技大学教授
机器人动作设计
机器人动作设计中需要进行多种复杂的合成运动分析与控制。合成运动理论可以指导机器人 的运动规划、轨迹跟踪和动作执行。
运动传感设计
合成运动分解是一种重要的运动测量技术。在车辆安全、物流配送、航空监控等领域,合成 运动传感器为复杂运动测量提供了有效手段。
合成运动的实验方法和技术
1
高速相机
观测高速运动的一种重要方法。运用指定的曝光时间和快门速度,拍摄合成运动 过程中的关键帧。
2
追踪仪器
用于测量运动物体的位置、速度和加速度等多种参数,对于合成运动的分析和控 制有着重要作用。
3
动力学仿真软件
自动地计算合成运动的轨迹、速度、加速度等参数。可以模拟物体的运动过程, 为结构设计和工艺分析提供有力支持。
合成运动的分类和特点
线性合成运动
由两个或两个以上直线运动叠 加而成;
圆周合成运动
由两个或两个以上曲线运动叠 加而成;
复合合成运动
由不同类型直线运动或曲线运 动叠加而成。
体育装备工程专业《理论力学》作业及答案

2011-2012 学年第一学期理论力学习题
——空间力系 一、 1. 2. 3. 4. 5. 6. 7. 8. 9. 判断题(正确的划√,错误的划×)
空间力偶中的两个力对任意投影轴的代数和恒为零。 (√) (模块 7) 空间力对点的矩在任意轴上的投影等于力对该轴的矩。 (×) (模块 6) 空间力系的主矢是力系的合力。 (√) (模块 7) 空间力系的主矩是力系的合力偶矩。 (√) (模块 7) 空间力系向一点简化得主矢和主矩与原力系等效。 (√) (模块 7) 空间力系的主矢为零,则力系简化为力偶。 (×) (模块 7) 空间汇交力系的平衡方程只有三个投影形式的方程。 (√) (模块 7) 空间汇交力系的三个投影形式的平衡方程,对投影轴没有任何限制。 (√) (模块 7) 空间力偶等效只需力偶矩矢相等。 (√) (模块 7)
空间力系向一点简化得主矢与简化中心的位置 有关 。 (模块 7)
6.
如图所示已知一正方体,各边长 a,沿对角线 BH 作用一个力 F,则该力在 x、y、z
- 11 -
2010 级体育装备工程专业
马勇
《理论力学》作业
轴
上
的 2 3
投
影
Fx =
F1x = − F ⋅ 、 Fz =
2 3
⋅
2 3 =− F 2 3 1 3 = 3 3 F
2010 级体育装备工程专业
马勇
《理论力学》作业
3、 一组合梁 ABC 的支承及载荷如图示。已知 F=1KN,M=0.5KNm,求固定端 A 的约束反力。
(模块 5)
(解) :组合梁及 BC 杆,受力分析如图所示。 DE、DF、DG 杆均为二力杆。
∑m
i =1
n
理论力学运动学知识点总结
运动学重要知识点一、刚体的简单运动知识点总结1.刚体运动的最简单形式为平行移动和绕定轴转动。
2.刚体平行移动。
·刚体内任一直线段在运动过程中,始终与它的最初位置平行,此种运动称为刚体平行移动,或平移。
·刚体作平移时,刚体内各点的轨迹形状完全相同,各点的轨迹可能是直线,也可能是曲线。
·刚体作平移时,在同一瞬时刚体内各点的速度和加速度大小、方向都相同。
3.刚体绕定轴转动。
•刚体运动时,其中有两点保持不动,此运动称为刚体绕定轴转动,或转动。
•刚体的转动方程φ=f(t)表示刚体的位置随时间的变化规律。
•角速度ω表示刚体转动快慢程度和转向,是代数量,。
角速度也可以用矢量表示,。
•角加速度表示角速度对时间的变化率,是代数量,,当α与ω同号时,刚体作匀加速转动;当α与ω异号时,刚体作匀减速转动。
角加速度也可以用矢量表示,。
•绕定轴转动刚体上点的速度、加速度与角速度、角加速度的关系:。
速度、加速度的代数值为。
•传动比。
一、点的运动合成知识点总结1.点的绝对运动为点的牵连运动和相对运动的合成结果。
•绝对运动:动点相对于定参考系的运动;•相对运动:动点相对于动参考系的运动;• 牵连运动:动参考系相对于定参考系的运动。
2.点的速度合成定理。
•绝对速度:动点相对于定参考系运动的速度;•相对速度:动点相对于动参考系运动的速度;•牵连速度:动参考系上与动点相重合的那一点相对于定参考系运动的速度。
3.点的加速度合成定理。
•绝对加速度:动点相对于定参考系运动的加速度;•相对加速度:动点相对于动参考系运动的加速度;•牵连加速度:动参考系上与动点相重合的那一点相对于定参考系运动的加速度;•科氏加速度:牵连运动为转动时,牵连运动和相对运动相互影响而出现的一项附加的加速度。
•当动参考系作平移或= 0 ,或与平行时, = 0 。
该部分知识点常见问题有问题一牵连速度和牵连加速度的意义。
问题二应用速度合成定理时要画速度矢量图。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
[讨论] (1) d v 与 d v 有何不同? 就直线和曲线分别说明。
dt dt
d v = a ——点的加速度矢。 dt
对直线、曲线都一样。
d v ——速度大小对时间的变化率 dt 在直线中为加速度大小: d v = a
dt
在曲线中为切向加速度大小: d v dt
=
at
36
第五章 点的运动学
(2)点作曲线运动, 画出下列情况下加速度的大致方向。 ① M1点作匀速运动; ② M2点作加速运动; ③ M3点作减速运动。
(2)速度
vx = x& = rω (1− cosωt)
vy = y& = rω sin ωt
v=
v
2 x
+
v
2 y
= rω
2
− 2 cosωt
=
2rω
sin
ωt
2
(3)切向、法向加速度
at = v&
= rω 2 cos ωt
2
an
=
rω 2
sin
ωt
2
思考:如何求点M的法向加速度?
30
第五章 点的运动学
dt dt
dt
dt
=
d2 x dt2 i
+ d2 y dt2
j
+
d2 dt
z
2
k
解析表达式: a = a x i + a y j + a z k
ax
=
d vx dt
=
d2 x d t2
=
v& x
=
&x&
ay
=
d vy dt
=
d2 y d t2
=
v& y
=
&y&
az
=
d vz dt
=
d2 z d t2
M点的运动方程为:
x = OC − O1M cos(ϕ −π / 2) = r(ωt − sinωt)
y = O1C + O1M sin(ϕ − π / 2) = r(1− cosωt)
29
第五章 点的运动学
x = OC − O1M cos(ϕ −π / 2) = r(ωt − sinωt) y = O1C + O1M sin(ϕ − π / 2) = r(1− cosωt)
ψ (y, z) = 0 13
第五章 点的运动学
三、点的速度
r = xi + yj+ zk
v = dr= dxi + d y j+ dz k
dt dt
dt
dt
解析表达式: v = v x i + v y j + v z k
vx
=
dx= dt
x&
vy
=
dy dt
=
y&
vz
=
dz dt
=
z&
即:速度在各坐标 轴上的投影等于动 点的各对应坐标对 时间的一阶导数。
(5)点作直线运动时,若其速度为零,其加速度也为零? 答:不一定,速度为零时加速度不一定为零。 例如:自由落体上抛到顶点时; 例5-1中正弦机构中B点的速度和加速度。
问:点作曲线运动时,若其速度大小不变,加速度是否 一定为零?
答:加速度不一定为零,只要点作曲线运动,就有法向 加速度。
40
第五章 点的运动学
xB = r sin( ωt + θ )
vB = rω cos( ω t + θ )
a B = − rω 2 sin( ω t + θ ) = −ω2xB
运动图线
加速度图线 速度图线
20
第五章 点的运动学
§5-3 自然法(弧坐标法)
前提:运动轨迹已知。
一、运动方程
弧坐标
(−)
A
原点O :轨迹上任选一点。
14
第五章 点的运动学
求出速度投影后,即可得速度的大小和方向余弦:
v=
v
2 x
+
v
2 y
+
v
2 z
cos( v , i ) = vx v
cos( v , j) = vy v
cos( v , k ) = vz v
15
第五章 点的运动学
四、点的加速度
a = d v = d vx i + d vy j + d vz k
第五章 点的运动学
例2 观察摆式运输机的运动
4
第五章 点的运动学
例3 观察行星轮的运动
5
第五章 点的运动学
例4 观察操纵斗的运动
6
第五章 点的运动学
例5 观察飞机的一般运动
7
第五章 点的运动学
例6 观察陀螺的运动特点
8
第五章 点的运动学
二、学习目的
学习动力学的基础 受力分析和运动分析是学习动力学的两大基础。
第五章 点的运动学
理 论 力 学(I)
第二部分
运动学
2009年10月8日
1
第五章 点的运动学
引言
一、运动学的研究对象及任务
研究对象 点和刚体(单个刚体、简单刚体系统)
研究任务 z 运动的几何性质; z 运动的合成与分解。 几个工程实例
2
第五章 点的运动学
例1 观察轮缘上点的运动轨迹
3
ds
=1
ρ
方向? n
26
第五章 点的运动学
an
=
v2
ρ
n
at
=
dvτ
dt
全加速度为:
a = a t + a n = a tτ + a n n
a = at2 + an2
θ = arctan | at |
an
讨论:什么情况下,点作加速运动? v 、at 同向 什么情况下,点作减速运动? v 、at 反向
= d s ⋅ d r = d s ⋅τ
dt ds dt
Mτ
v M′
ΔrΔs
O
(+)
r (t )
(−)
r(t + Δt)
O
v= ds dt
= v ⋅τ
24
第五章 点的运动学
四、点的加速度
ቤተ መጻሕፍቲ ባይዱ
a = d v = d (vτ ) = d v ⋅ τ + v ⋅ d τ
d t dt
dt
dt
=
d2 s dt2
a3
a2 a1
37
第五章 点的运动学
(3)指出在下列情况下,点M作何种运动?
① an ≡ 0, at = 常数 ② at ≡ 0, ρ = 常数
(匀变速直线运动) (匀速圆周运动)
③ a =0
(匀速直线运动或静止)
④ an ≡ 0, ρ → ∞ ⑤ at ≡ 0 ⑥ ρ = 常数
(直线运动) (匀速运动) (圆周运动)
22
第五章 点的运动学
思考:自然轴系与固定直角坐标系的共同点? 自然轴系与固定直角坐标系的不同点?
23
第五章 点的运动学
三、点的速度
v = dr dt
= lim Δ r Δt→ 0 Δ t
= lim ( Δ r ⋅ Δ s ) Δt→ 0 Δ s Δ t
= lim Δ s ⋅ lim Δ r Δt→ 0 Δ t Δt→ 0 Δ s
§5-2 直角坐标法
一、运动方程
x = f1(t) = x(t) y = f2 (t) = y(t)
z = f3 (t) = z(t)
二、轨迹方程
z
M(x, y,z)
k
r
O j
i
z
y
x
x
y
r = xi + yj + zk
消去上式中的参数时间 t,即可求得点的轨迹方程。
ϕ (x, y) = 0
——空间曲线方程
第五章 点的运动学
第五章 点的运动学
研究对象 ——几何点, 称为运动的点 研究任务 ——研究点在空间运动的几何性质 具体内容
§5-1 矢量法 §5-2 直角坐标法 §5-3 自然法 *§5-4 点的速度和加速度在柱坐标和极坐标中的投影 *§5-5 点的速度和加速度在球坐标中的投影
11
第五章 点的运动学
夹角ϕ = ω t +θ,其中θ 为t =0 时的夹角,ω为常数。动杆上
A、B两点间距离为b。 求: A、B两点的运动方程及 点B的速度和加速度。
解:(1)求A、B两点的运动方程(取坐标轴Ox如图示)
xA = b + r sin ϕ = b + r sin( ωt + θ )
xB = r sin ϕ = r sin( ωt + θ )
将速度投影再对时间求导,即得加速度在直角坐标
轴上的投影:
ax = &x& = rω 2 sin ωt a y = &y& = rω 2 cos ωt
M点的全加速度为: a =
ax2
+
a
2 y
= rω 2
于是法向加速度为: an =
a2
−
a
2 t
= rω 2 sin ωt
2
另外,还可求得轨迹的曲率半径
27
第五章 点的运动学
28
第五章 点的运动学
[例5-2] 半径为r的轮子沿直线轨道作纯滚动,设轮子
转角ϕ =ωt ( ω为常值),如图所示。求用直角坐标和