006理论力学-点的运动学
第六章点的运动和刚体的基本运动
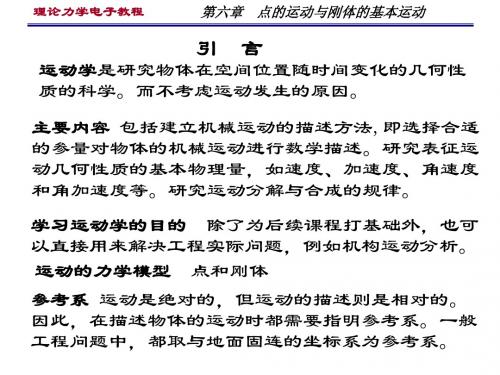
例 题 6-1
解:取坐标轴 Ox 如图。由三角形相似关
L A
系,有
l
B
OM BM OL AB
h O
M x
即
x x vt h l
vt
x
从而求得 M 点的直线运动方程
x h vt hl
M 点的速度
v dx h v dt h l
而加速度 a = 0 ,即 M 点作匀速运动。
理论力学电子教程
理论力学电子教程
第六章 点的运动与刚体的基本运动
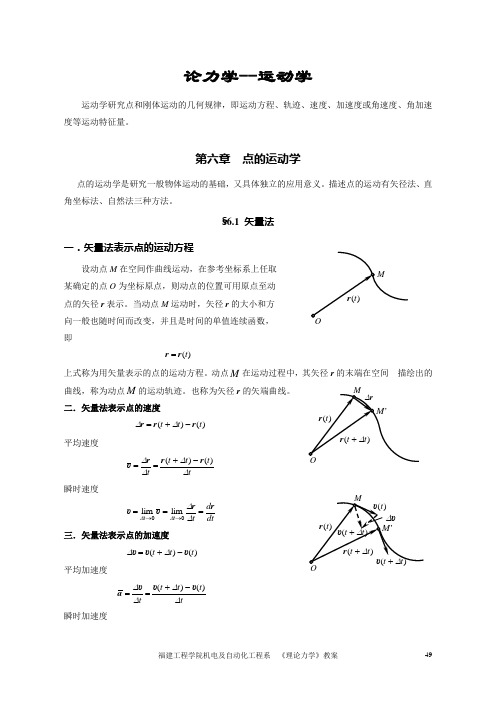
例 题 6-6
解:
已知销钉B的轨迹是圆弧DE,中心 在A点 , 半径是R。选滑道上O' 点作为 弧坐标的原点,并以O'D为正向。则B
+s ω O R -s E φ A
D
C B s
点在任一瞬时的弧坐标
s R
但是,由几何关系知 且 得
θ R O'
2 ,
dr dx dy dz v i j k dt dt dt dt
又 v vx i vy j vz k
理论力学电子教程
第六章 点的运动与刚体的基本运动
dx 故 vx dt
速度大小
dy vy dt
2 2
dz vz dt
2
v v x v y vz vx vy vz 方向 cos( v , i ) cos( v , k ) cos(v , j ) v v v
π sin 2π t ,将其代入上式, 8
π sin 2π t 40
s 2 R
这就是B点的自然形式的运动方程。
理论力学电子教程
第六章 点的运动与刚体的基本运动
理论力学教案-运动学
论力学--运动学运动学研究点和刚体运动的几何规律,即运动方程、轨迹、速度、加速度或角速度、角加速度等运动特征量。
第六章 点的运动学点的运动学是研究一般物体运动的基础,又具体独立的应用意义。
描述点的运动有矢径法、直角坐标法、自然法三种方法。
§6.1 矢量法一.矢量法表示点的运动方程设动点M 在空间作曲线运动,在参考坐标系上任取 某确定的点O 为坐标原点,则动点的位置可用原点至动 点的矢径r 表示。
当动点M 运动时,矢径r 的大小和方 向一般也随时间而改变,并且是时间的单值连续函数, 即)(t r r =上式称为用矢量表示的点的运动方程。
动点M 在运动过程中,其矢径r 的末端在空间 描绘出的曲线,称为动点M 的运动轨迹。
也称为矢径r 的矢端曲线。
二.矢量法表示点的速度)()(t t t r r r -+=∆∆平均速度tt t t t ∆∆∆∆)()(r r r υ-+== 瞬时速度dtd t t t rr υυ===→→∆∆∆∆00limlim 三.矢量法表示点的加速度 )()(t t t υυυ-+=∆∆ 平均加速度tt t t t ∆∆∆∆)()(υυυa -+==瞬时加速度2200lim lim dt d dt d t t t rυυa a ====→→∆∆∆∆结论:动点的速度等于它的矢径r 对时间的一阶导数,其加速度等于动点的速度对时间的一阶导数,也等于动点的矢径r 对时间的二阶导数。
§6.2 直角坐标法一.直角坐标表示动点的运动方程由于k j i r z y x ++=,当动点在轨迹上运动时,r 随时间而变化,则动点M 的坐标值x ,y 和z 随时间 而变化。
即⎪⎩⎪⎨⎧===)()()(321t f z t f y t f x消去方程中的参数t ,则得到动点运动的轨迹。
二.直角坐标表示动点的运动速度由于动点M 的矢径可表示为 k j i r z y x ++=,所以动点M 的速度可表示为 k j i r υdtdzdt dy dt dx dt d ++==将动点M 的速度写成投影形式,即k j i υz y x υυυ++=比较以上两式,可得dt dx x =υ,dt dy y =υ,dtdz z =υ 三.直角坐标表示动点运动的加速度动点M 的速度可表示为k j i r υdtdz dt dy dt dx dt d ++==,其加速度可表示为 k j i υa 222222dtzd dt y d dt x d dt d ++==将动点M 的加速度写成投影形式,即k j i a z y x a a a ++=比较以上两式,可得 22dt x d a x =,22dt y d a y =,22dt z d a z =结论:动点的速度在各坐标轴上的投影等于各对应的坐标对时间的一阶导数,动点的加速度在各坐标轴上的投影等于各对应的坐标对时间的二阶导数。
理论力学--运动学总结

速度瞬心位置的确定总结
瞬时平动
几点注意 1、基点法是速度分析的基本方法;
2、速度投影法 应用起来简单,但必须知道待求速度 点的方位,致命的弱点—是不能求图形的角速度 2、当平面几何简单时,分析速度可采用瞬心法; 瞬心法既可以求某点的速度,也可以求刚体运动 的角速度; 4、确定速度瞬心的速度是该点的绝对运动速度; 5、具体分析时三种方法灵活运用;
(1)刚体的基本运动 平动
v A vB
aA aB
各点的轨迹相同;
可简化为一个点的运动。
定轴转动
v R
a R
an R 2
轮系的传动比:
1 n1 R1 Z 2 i12 2 n2 R2 Z1
各处不打滑时: 接触点有相同的线速度和相同的切向加速度。
(2)刚体的平面运动 1. 定义 任一点到某固定平面的距离保持不变。
B点的加速度分析
D
C
a a 2 a a 2 ae 2 ar 2
n
aa 2 ae 2
O1
30°
ar 2
B
aa 2cos60 aa2cos30 ae 2
n
aa 2
1
30° O2
n
A
a a2 O2 B 2
n 2 aa2 O2 B2
ae2 657mm/ s
2
三、刚体的运动
va=v
vCA
动点:滑块C 动系:固结于AE
u=vA
vr
vC' A
ωAE
分析三种运动
牵连运动:刚体的平面运动
牵连转动
va ( vA vCA ) vr
va cos vCA v A sin
理论力学第五章 点的运动
【例5.1】 已知点的运动方程为 x r cost y r sin t 其中:r、ω是常数。求动点的运动轨迹、速度与加速度。
目录
第五章 点的运动\描述点运动的直角坐标表示法
【解】 为求动点的运动轨迹,将运动方程平方后相加,消去t得 x2 y2 r 2
这说明动点的运动轨迹是以O为圆心、r为半径的一个圆。当 ωt=0时,x=r, y=0,动点位于x轴上,当ωt=π/2时,x=0, y=r,动点位 于y轴上。 y v 动点的速度在坐标轴上的投影为 M r v x r sin t t v y r cost x O 因此速度的大小为
z M k O r z
a
v x y
i
j y
上式表明,动点的加速度在各坐标轴上的投影分别等于动点相 应的位置坐标对时间t的二阶导数。 目录
第五章 点的运动\描述点运动的直角坐标表示法 加速度的大小及方向余弦为
2 2 2 d x d y d z 2 2 2 2 2 2 a ax a y az ( 2 ) ( 2 ) ( 2 ) dt dt dt ay ax az cosa , i cosa , j cosa , k a a a
x x(t ) y y (t )
当动点始终沿一直线运动时,如取该直线为坐标轴Ox,则动点 的运动方程为
x x(t )
目录
第五章 点的运动\描述点运动的直角坐标表示法
5.2.2 用直角坐标表示点的速度
如图所示,若以O点为坐标原点建立 Oxyz直角坐标系,则动点的位置矢量r 可表示为
第五章 点的运动\描述点运动的弧坐标表示法
dr τ ds 式中:—沿轨迹切向指向弧坐标正向的单位矢量。此外,
理论力学重难点及相应题解
运动学部分:一、点的运动学重点难点分析1.重点:点的运动的基本概念(速度与加速度,切向加速度和法向加速度的物理意义等);选择坐标系,建立运动方程,求速度、加速度。
求点的运动轨迹。
2.难点:运动方程的建立。
解题指导:1.第一类问题(求导):建立运动方程然后求导。
若已知点的运动轨迹,且方程易于写出时,一般用自然法,否则用直角坐标法。
根据点的运动性质选取相应的坐标系,对于自然法要确定坐标原点和正向。
不管用哪种方法,注意将点置于一般位置,而不能置于特殊位置。
根据运动条件和几何关系把点的坐标表示为与时间有关的几何参数的函数,即可得点的运动方程。
2.第二类问题(积分):由加速度和初始条件求运动方程,即积分并确定积分常数。
二、刚体的简单运动重点难点分析:1.重点:刚体平移、定轴转动基本概念;刚体运动方程,刚体上任一点的速度和加速度。
2.难点:曲线平移。
解题指导:首先正确判断刚体运动的性质。
其后的分析与点的运动分析一样分两类问题进行。
建立刚体运动方程时,应将刚体置于一般位置。
三、点的合成运动(重要)重点难点分析:1.重点:动点和动系的选择;三种运动的分析。
速度合成与加速度合成定理的运用。
2.难点:动点和动系的选择。
解题指导:1.动点的选择、动系的确定和三种运动的分析常常是同时进行的,不可能按顺序完全分开。
2.常见的运动学问题中动点和动系的选择大致可分以下五类:(1)两个(或多个)不坟大小的物体独立运动,(如飞机、海上的船舶等)对该类问题,可根据情况任选一个物体为动点,而将动系建立在另一个物体上。
由于不考虑物体的大小,因此动系(刚体)与物体(点)只在一个点上连接,可视为铰接,建立的是平移动坐标系。
(2)一个小物体(点)相对一个大物体(刚体)运动,此时选小物体为动点,动系建立在大物体上。
(3)两个物体通过接触而产生运动关系。
其中一个物体的接触只发生在一个点上,而另一个物体的接触只发生在一条线上。
选动点为前一物体的接触点,动系则建立在后一物体上。
理论力学(第7版)第五章 点的运动学

运 动 规 律
[例5-1 ] 已知点的运动方程为x=2sin 4t m,y=2cos 4t m, z=4t m。 求:点运动轨迹的曲率半径 。
解:
vx x 8 cos 4t , ax 32 sin 4t x
r r t
—以矢量表示的 点的运动方程
矢端曲线:动点M在运动过程中,矢 径r的末端绘出的一条连续曲线。 ——动点M的运动轨迹
3
二.点的速度
dr v r dt
方向:沿着矢径r的矢端曲线的切线 方向,且与此点的运动方向一致。
大小:速度矢的模,表明点运动的快慢。
三.加速度
dv d 2r a r 2 dt dt
dv v2 a a a n a a n n n dt
17
5-3 自然法 曲率(1 / ) :
定义——曲线切线的转角对弧长 一阶导数的绝对值。表示曲线的 弯曲程度。
d lim| | t 0 S dS 1
由于a , an均在密切面内,全加速a必在密切面内。 度
— 与 弧 坐 标 的 正 向 一 致 n — 指 向 曲 线 内 凹 一 侧 b — 与 , n 构 成 右 手 系
b n
[注]:自然坐标系是沿曲 13 线而变动的游动坐标系。
(动画自然坐标轴的几何性质)
曲线在P点的密切面形成
5-3 自然法
二.点的速度
当t 0时,r MM' S
v y y 8 sin 4t , a y 32 cos 4t y
v z z 4, a z 0 z
2 2 2 2 v v x v 2 v z 80 m s , a a x a 2 a z 32m s 2 y y
理论力学精品课程第七章 点的运动学
v r x i y j z k v xi v yj v zk
vxx , vyy , vzz
第七章 点的运动学
3.加 速 度
vd d r t d d x tid d y tjd d z tk vxi vyj vzk
z
P
v
rza
adv d2xid2y jd2zk dt dt2 dt2 dt2
第七章 点的运动学
3.加 速 度
t 瞬时: 速度 v(t)
t+ t 瞬时: 速度 v(t + t ) 或 v(t)+v(t)
alimvdvv t0t dt
a
d2r dt 2
r
第七章 点的运动学
z
v
P
P´v
r(t) v'
v'
r'
O
y
x
§7-2 直角坐标法
1.运动方程
z
P
v
rza
k iO
j
y
x
y
x
第七章 点的运动学
● 弧坐标法-应用于运动轨迹已知的情形,其最大特 点是将速度矢量大小的变化率和方向变 化率区分开来,使得数学表达式的含义 更加清晰。
第七章 点的运动学
点的运动学应用的两类问题
第一类问题:
已知运动轨迹,确定速度与加速度; 给定约束条件,确定运动轨迹、速度、加速度。
第二类问题:
已知加速度以及运动的初始条件,确定速度和 运动轨迹-第一类问题的反运算。
N(主法线) s+
bn
s-
P
T(切线)
第七章 点的运动学
自然轴系的 基矢量
b= ×n
自然轴系的 特点
理论力学-点的运动学
求该瞬时动点A的 x ,y , x , y ,
y v
30 0
A
0 v 10 cos 30 ( m/s 解: x x
0 y v 10 sin 30 ( m/s) y
o
v v v
x y z
a
x y z
x
x y z
18
2.速度:
v M v r
ds v dt
_
r
0
S M* +
`
r*
19
3
点的切向加速度和法向加速度
dv a a a n dt
n
M
+
dv a dt
v an n
2
20
自然轴系
21
例:已知图示瞬时动点A的速度和加速度,其中
2 :v ,设动点的坐标为x , y 10 m/s, a 10 m/s
z
r o
x
M
y
一、矢量法
1、运动方程
r r(t)
2、速度
3、加速度
dr v r dt 2 d v dr a 2 v r d t d t
8
二、直角坐标法
x x (t) 1、运动方程 y y (t) r x i y j z k z z(t)
0??za??yrx15三自然坐标法1运动方程tss?xyzoms0r2曲线的几何性质?曲率curvaturesks??????0limmtt??smm??mtk1???曲率半径radiuscurvaturemtt极限位置的平面称为密切面osculatingplane已知点的运动轨迹16mtt极限位置的平面称为密切面面osculatingplane17bn??????法面ms?密切面切线b副法线主法线nbn??自然轴系trihedralaxesonacurve1
理论力学 第一章 点的运动学
已知速度的投影求速度
大小
v v v v
2 x 2 y
2 z
方向由方向余弦确定
cosv , i v x v cosv , j v y v cosv , k v z v
THEORETICAL MECHANICS
山东大学 土建与水利学院工程力学系
THEORETICAL MECHANICS
山东大学 土建与水利学院工程力学系
§ 1.1点的运动矢量分析方法
加
速
度
t 瞬时: 速度 v(t) t+ t 瞬时:速度 v(t + t ) 或v
t 时间间隔内速度的改变量
v ( t ) = v ( t + t ) - v( t )
点在 t 瞬时的加速度
§ 1.2 点的运动的直角坐标法
加速度
a ax i a y j az k
dv x d 2 x ax 2 dt dt dv y d 2 y ay 2 dt dt dv z d 2 z az 2 dt dt
dv y dv x dv z d2 y d2x d2z a i j k 2 i 2 j 2 k dt dt dt dt dt dt
方 cosa, i a x a, 向 cosa, j a y a, 余 弦 cosa, k a z a
THEORETICAL MECHANICS
山东大学 土建与水利学院工程力学系
§1.3 点的运动的自然坐标法
在点的运动轨迹已知的情况下,可建立弧
坐标和自然轴系来描述该点的运动,这种方
点的切线所组成的 平面,称为P点的密 切面。
P P
lim a1 a
006理论力学-点的运动学
x = (BC+ CM) cosϕ = (l + a) cosωt y = AMsinϕ = (l − a) sinωt
9
这就是动点M的运动方程。从运动方程中消去时间t,即得轨 迹方程
x2 y2 + =1 2 2 (l + a) (l − a) 可见,动点M的轨迹为一椭圆,其长轴与x轴重合,短轴与y 轴重合。当M点在BC段上时,椭圆的长轴将与y轴重合,短轴 将与x轴重合。 x M点的速度在坐标轴上的投影为
1
引
言
运动学的一些基本概念 是研究物体在空间位置随时间变化的几何性质的科学。 ① 运动学 (包括轨迹、速度、加速度等),而不考虑运动的原因。 ② 运动学研究的对象 ③ 运动学学习目的 ① 建立机械运动的描述方法 ② 建立运动量之间的关系 为后续课打基础及直接运用于工程实际。
④ 运动是相对的 ( relativity ) :参考体(物);参考系; 静系;动系。 瞬时、 ⑤ 瞬时、时间间隔 (⋅)t (⋅− − − ⋅)∆t = t 2 − t1 ⑥ 运动分类 1)点的运动; 2)刚体的运动
dx = −ω (l + a ) sin ωt vx = dt dy vy = = ω (l − a ) cos ωt dt
10
速度的大小为
2 2 v = vx + vy =ω (l + a)2 sin2 ωt + (l − a)2 cos2 ωt =ω l 2 + a2 − 2alcos2ωt
速度的方向余弦为
12
§6-3 平面极坐标法
• 平面极坐标系 • 位置坐标(r , • 轨道方程 •
ϑ)
r = r (t ),
r j
r
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
vx cos(v,i ) = = sin 2ω t v vy cos(v,j ) = = cos 2ω t v
弧坐标法: 弧坐标法 动点M的运动轨迹是圆弧,在轨迹上取水平直径的端点O2 为弧坐标的原点,并规定O2点的上方为正,则任一瞬时动点M 的位置可用弧坐标S表示,显然
s = Rθ = 2 R = 2 Rωt
x = R cos 2ωt y = R sin 2ωt
17
将运动方程分别对时间求一阶导数和二阶导数,分别 可得速度和加速度在直角坐标轴上的投影:
dx = 2 Rω sin 2ωt dt dy vy = = 2 Rω cos 2ωt dt 速度的大小为 vx =
2 2 v = vx + vy = 2Rω
x2 y2 + =1 2 2 (l + a) (l a) 可见,动点M的轨迹为一椭圆,其长轴与x轴重合,短轴与y 轴重合。当M点在BC段上时,椭圆的长轴将与y轴重合,短轴 将与x轴重合。 x M点的速度在坐标轴上的投影为
dx = ω (l + a ) sin ωt vx = dt dy vy = = ω (l a ) cos ωt dt
d2 x a x = 2 = 4 Rω 2 cos 2ωt dt d2 y a y = 2 = 4 Rω 2 sin 2ωt dt 加速度的大小为
2 2 a = a x + a y = 4 Rω 2
速度的方向为
加速度的方向为
ax cos(a,i ) = = cos 2ω t a ay cos(a,j ) = = sin 2ω t a
自然法
以点的轨迹作为一条曲线形式的坐标轴来确定动点的位 1.弧坐标的运动方程 弧坐标的运动方程S=f (t) 弧坐标的运动方程
பைடு நூலகம்
r= f1 (t )
补充: 补充:极坐标法(对平面曲线运动时可用) 同理可导出柱坐标下的点的运动方程
θ = f2 (t )
13
2.自然轴系 自然轴系
二.点的速度 点的速度
r r S v = lim = lim ( ) t→ 0 t t → 0 S t S r dS dr = lim lim = t→ 0 t t→ 0 S dt dS dS = τ = vτ 14 dt
1
引
言
运动学的一些基本概念 ① 运动学 是研究物体在空间位置随时间变化的几何性质的科学。 (包括轨迹、速度、加速度等),而不考虑运动的原因。 ② 运动学研究的对象 ① 建立机械运动的描述方法 ② 建立运动量之间的关系 ③ 运动学学习目的 为后续课打基础及直接运用于工程实际。 ④ 运动是相对的 ( relativity ) :参考体(物);参考系; 静系;动系。 瞬时、 ⑤ 瞬时、时间间隔
这就是小环M以弧坐标表示的运动方程。 将弧坐标表示的运动方程分别对时间求一阶和二阶导数, 可得速度与切向加速度的大小为
ds v= = 2 Rω dt d2 s aτ = 2 = 0 dt
19
因为切向加速度等于零,故全加速度即为法向加速度,其 大小为:
an =
v2
。加速度大小为 4 Rω 2 ,方向指向圆心(与矢径r反向)。 以上两种方法求得的结果完全相同。由于运动轨迹已知, 因而用自然法求解显然更加方便。
23
dv dv 直线、曲线都一样) =a (直线、曲线都一样), =a 为速度的 dt dt
指出在下列情况下, 作何种运动? ③ 指出在下列情况下,点M作何种运动 作何种运动 (1) an = 0 , aτ = 常数 (匀变速直线运动) (2) aτ = 0,ρ = 常数 (匀速圆周运动) (3) a = 0 (匀速直线运动或静止) (4) an = 0 ,ρ → ∞ (直线运动) (5) aτ = 0,v = 常数 (匀速运动) (6) ρ = 常数 (圆周运动) (7) (8) (9)
d vx ax = = ω 2 (l + a ) cos ωt dt d vy ay = = ω 2 (l a) sin ωt dt
11
加速度的大小为
2 2 2 2 a = ax +ay =ω2 (l +a)2 cos ωt +(l a)2 sin ωt
=ω l +a +2alcos ωt 2
2 2 2
1 2 Q S = aτ t ,V = aτ t; 2 V 2 (aτ t ) 2 2S ∴ an = = = aτ R R R an 2S 2 Rβ tg α = = = = 2β aτ R R
21
点的运动学问题一般解题步骤为: 点的运动学问题一般解题步骤为: 1).根据题意,确定研究对象,并将其抽象为动点; 2).分析动点的运动情况,并根据其特点选择恰当的解题方 法。当动点轨迹可按题意直接确定时,采用自然坐标法;当动 点轨迹不可确定时,采用直角坐标法; 3).在具体求解时,常会遇到两种情况:一种是运动方程、 速度、加速度都是待求的未知参数,此时应先按题意建立运动 方程,可将动点的坐标用时间t表出,一但运动方程已建立,就 可用函数求导的方法按速度、加速度与运动方程之间的关系求 出其速度、加速度;另一种是已知动点的加速度或速度,要求 出动点的运动方程,此时可根据运动方程、速度、加速度之间 的关系,通过积分的方法来确定。
dv v 即n= a n, a = aτ + an = ∴ τ+ n ρ dt ρ |aτ | 2 2 a= aτ +an , α=arctg an 16
v2
[例2] 如图所示,固定圆圈的半径为R,摇杆O1A绕O1轴以匀 例 角速度 摇杆和圆圈上。运动开始时, 速度和加速度。 直角坐标法: 解 直角坐标法
二.点的速度
dr dx dy dz v= = i+ j+ k dt dt dt dt
∴ v = vxi + v y j + vz k
v = v +v +v
2 x 2 y
2 z
vx cos( v i ) = v
∧
vy cos( v j ) = v
∧
vz cos( v k ) = v
∧
7
三. 点的加速度
(加速运动 加速运动) 加速运动
22
课堂自学
用柱坐标法给出点的运动方程。 ① 用柱坐标法给出点的运动方程。
柱坐标法方程
= f1(t) r= f2 (t) z= f (t) 3
dv dv 有何不同?就直线和曲线分别说明 就直线和曲线分别说明。 ② d t 与 dt 有何不同 就直线和曲线分别说明。
大小变化率, 大小变化率,在曲线中应为切向加速度 τ = dv 。 a dt
5
§6 - 1 矢量法
一.点的运动方程
r = OM = r (t )
二.点的速度
r dr & v = lim = = r t→ 0 t dt
三.点的加速度
v dv d 2 r && a = lim = = =r 2 t→0 t dt dt
6
§6 - 2
一.点的运动方程
直角坐标法
r = xi + yj + zk
an = 0
aτ = 0
(匀速运动) (匀速曲线运动) (匀变速曲线运动)
24
(直线运动) aτ = 0,an = 常数
(10) aτ = 常数,an = 常数
点作曲线运动, ④ 点作曲线运动,画出下列 情况下点的加速度方向。 情况下点的加速度方向。 (1) M1点作匀速运动 (2) M2点作加速运动 (3) M3点作减速运动 ⑤ 判断下列运动是否可 能出现,若能出现判断是什么运动? 能出现,若能出现判断是什么运动?
加速度的方向余弦为
ax l + a) ω t ( cos cos(a,i) = = a l 2 + a 2 + 2al cos 2ω t ay l a) ω t ( sin cos(a,j) = = a l 2 + a 2 + 2al cos 2ω t
12
§6 - 3
置的方法叫自然坐标法。 自然坐标法。 自然坐标法 一.弧坐标,自然轴系 弧坐标,
都是时间单位连续函数。 这里的 x、y、z 都是时间单位连续函数。 当消去参数 t 后,可得到 F(x,y,z)=0 形式的轨迹方程。 形式的轨迹方程。
8
x = f 1 (t) y = f 2 (t) z = f (t) 3
[ 例 1]
椭圆规的曲柄OC可绕定轴O转动,其端点C与规尺
AB的中点由铰链连接,规尺两端A、B可分别沿互相垂直的两 直槽滑动。已知OC的转角为 、速度和加速度。 解 首先建立M点的运动方程,为
()t
( )t = t 2 t1
⑥ 运动分类 1)点的运动; 2)刚体的运动
2
3
第六章
§6–1 §6–2 §6–3
点的运动学
矢量法 直角坐标法 自然法
4
引
言
点的运动学,是研究一般物体运动的基础,又具体独立的 应用意义,它将研究点的几何规律,即运动方程、轨迹、速度 运动方程、轨迹、 运动方程 及加速度等运动特征量。描述点的运动有矢径法、直角坐标法 矢径法、 及加速度 矢径法 和自然法三种方法。矢径法通常用于理论推导,在具体问题的 和自然法 计算中通常采用直角坐标法和自然坐标法。如果点的运动轨迹 未知,一般选用直角坐标法;如果点的轨迹已知,则用自然坐 标法比较方便。
15
由图可知
| τ |=| τ' τ |= 2 | τ | sin = 2 sin 2 2 当 t → 0时,s → 0, → sin 2 2
| τ |= 1,于是, τ ≈
τ ∴ lim | |= lim t→0 s t→0 2 sin sin 2 = lim ( 2 ) = d = 1 t→0 s s ds ρ 2 2