机械设计基础王大康主编重点章节答案
机械设计基础课后答案(1-18章全)正式完全版

第11章 蜗杆传动11.1 蜗杆传动的特点及使用条件是什么?答:蜗杆传动的特点是:结构紧凑,传动比大。
一般在传递动力时,10~80i =;分度传动时只传递运动,i 可达1 000;传动平稳,无噪声;传动效率低;蜗轮一般用青铜制造,造价高;蜗杆传动可实现自锁。
使用条件:蜗杆传动用于空间交错(90)轴的传动。
用于传动比大,要求结构紧凑的传动,传递功率一般小于50kW 。
11.2 蜗杆传动的传动比如何计算?能否用分度圆直径之比表示传动比?为什么?答:蜗杆传动的传动比可用齿数的反比来计算,即1221i n n z z ==;不能用分度圆直径之比表示传动比,因为蜗杆的分度圆直径11d mq mz =≠。
11.3 与齿轮传动相比较,蜗杆传动的失效形式有何特点?为什么?答:蜗杆传动的失效形式与齿轮传动类似,有点蚀、弯曲折断、磨损及胶合。
但蜗杆传动中蜗轮轮齿的胶合、磨损要比齿轮传动严重得多。
这是因为蜗杆传动啮合齿面间的相对滑动速度大,发热严重,润滑油易变稀。
当散热不良时,闭式传动易发生胶合。
在开式传动及润滑油不清洁的闭式传动中,轮齿磨损较快。
11.4 何谓蜗杆传动的中间平面?中间平面上的参数在蜗杆传动中有何重要意义? 答:蜗杆传动的中间平面是通过蜗杆轴线且垂直于蜗轮轴线的平面。
中间平面上的参数是标准值,蜗杆传动的几何尺寸计算是在中间平面计算的。
在设计、制造中,皆以中间平面上的参数和尺寸为基准。
11.5 试述蜗杆直径系数的意义,为何要引入蜗杆直径系数q ?答:蜗杆直径系数的意义是:蜗杆的分度圆直径与模数的比值,即1q d m =。
引入蜗杆直径系数是为了减少滚刀的数量并有利于标准化。
对每个模数的蜗杆分度圆直径作了限制,规定了1~4个标准值,则蜗杆直径系数也就对应地有1~4个标准值。
11.6 何谓蜗杆传动的相对滑动速度?它对蜗杆传动有何影响?答:蜗杆传动的相对滑动速度是由于轴交角90∑=,蜗杆与蜗轮啮合传动时,在轮齿节点处,蜗杆的圆周速度1v 和蜗轮的圆周速度2v 也成90夹角,所以蜗杆与蜗轮啮合传动时,齿廓间沿蜗杆齿面螺旋线方向有较大的相对滑动速度s v ,其大小为s 1cos v v λ==。
机械设计基础_课后答案(1-18章)[1]
![机械设计基础_课后答案(1-18章)[1]](https://img.taocdn.com/s3/m/fb102308fe00bed5b9f3f90f76c66137ee064f8c.png)
机械设计基础_课后答案(1-18章)[1]⽬录第1章机械设计概述 (1)第2章摩擦、磨损及润滑概述 (3)第3章平⾯机构的结构分析 (12)第4章平⾯连杆机构 (16)第5章凸轮机构 (36)第6章间歇运动机构 (46)第7章螺纹连接与螺旋传动 (48)第8章带传动 (60)第9章链传动 (73)第10章齿轮传动 (80)第11章蜗杆传动 (112)第12章齿轮系 (124)第13章机械传动设计 (131)第14章轴和轴毂连接 (133)第15章轴承 (138)第16章其他常⽤零、部件 (152)第17章机械的平衡与调速 (156)第18章机械设计CAD简介 (163)第1章机械设计概述1.1机械设计过程通常分为哪⼏个阶段?各阶段的主要内容是什么?答:机械设计过程通常可分为以下⼏个阶段:1.产品规划主要⼯作是提出设计任务和明确设计要求。
2.⽅案设计在满⾜设计任务书中设计具体要求的前提下,由设计⼈员构思出多种可⾏⽅案并进⾏分析⽐较,从中优选出⼀种功能满⾜要求、⼯作性能可靠、结构设计可靠、结构设计可⾏、成本低廉的⽅案。
3.技术设计完成总体设计、部件设计、零件设计等。
4.制造及试验制造出样机、试⽤、修改、鉴定。
1.2常见的失效形式有哪⼏种?答:断裂,过量变形,表⾯失效,破坏正常⼯作条件引起的失效等⼏种。
1.3什么叫⼯作能⼒?计算准则是如何得出的?答:⼯作能⼒为指零件在⼀定的⼯作条件下抵抗可能出现的失效的能⼒。
对于载荷⽽⾔称为承载能⼒。
根据不同的失效原因建⽴起来的⼯作能⼒判定条件。
1.4标准化的重要意义是什么?答:标准化的重要意义可使零件、部件的种类减少,简化⽣产管理过程,降低成本,保证产品的质量,缩短⽣产周期。
第2章摩擦、磨损及润滑概述2.1按摩擦副表⾯间的润滑状态,摩擦可分为哪⼏类?各有何特点?答:摩擦副可分为四类:⼲摩擦、液体摩擦、边界摩擦和混合摩擦。
⼲摩擦的特点是两物体间⽆任何润滑剂和保护膜,摩擦系数及摩擦阻⼒最⼤,磨损最严重,在接触区内出现了粘着和梨刨现象。
(完整版)机械设计基础课后习题答案.

第三章部分题解参考3-5 图3-37所示为一冲床传动机构的设计方案。
设计者的意图是通过齿轮1带动凸轮2旋转后,经过摆杆3带动导杆4来实现冲头上下冲压的动作。
试分析此方案有无结构组成原理上的错误。
若有,应如何修改?习题3-5图习题3-5解图(a) 习题3-5解图(b) 习题3-5解图(c) 解 画出该方案的机动示意图如习题3-5解图(a),其自由度为:14233 2345=-⨯-⨯=--=P P n F 其中:滚子为局部自由度计算可知:自由度为零,故该方案无法实现所要求的运动,即结构组成原理上有错误。
解决方法:①增加一个构件和一个低副,如习题3-5解图(b)所示。
其自由度为:115243 2345=-⨯-⨯=--=P P n F ②将一个低副改为高副,如习题3-5解图(c)所示。
其自由度为:123233 2345=-⨯-⨯=--=P P n F 3-6 画出图3-38所示机构的运动简图(运动尺寸由图上量取),并计算其自由度。
习题3-6(a)图 习题3-6(d)图解(a) 习题3-6(a)图所示机构的运动简图可画成习题3-6(a)解图(a)或习题3-6(a)解图(b)的两种形式。
自由度计算:1042332345=-⨯-⨯=--=P P n F习题3-6(a)解图(a)习题3-6(a)解图(b)解(d) 习题3-6(d)图所示机构的运动简图可画成习题3-6(d)解图(a)或习题3-6(d)解图(b)的两种形式。
自由度计算:1042332345=-⨯-⨯=--=P P n F习题3-6(d)解图(a) 习题3-6(d)解图(b)3-7 计算图3-39所示机构的自由度,并说明各机构应有的原动件数目。
解(a) 10102732345=-⨯-⨯=--=P P n FA 、B 、C 、D 为复合铰链原动件数目应为1说明:该机构为精确直线机构。
当满足BE =BC =CD =DE ,AB =AD ,AF =CF 条件时,E 点轨迹是精确直线,其轨迹垂直于机架连心线AF解(b) 1072532345=-⨯-⨯=--=P P n FB 为复合铰链,移动副E 、F 中有一个是虚约束 原动件数目应为1说明:该机构为飞剪机构,即在物体的运动过程中将其剪切。
最全《机械设计基础》答案完整版.doc
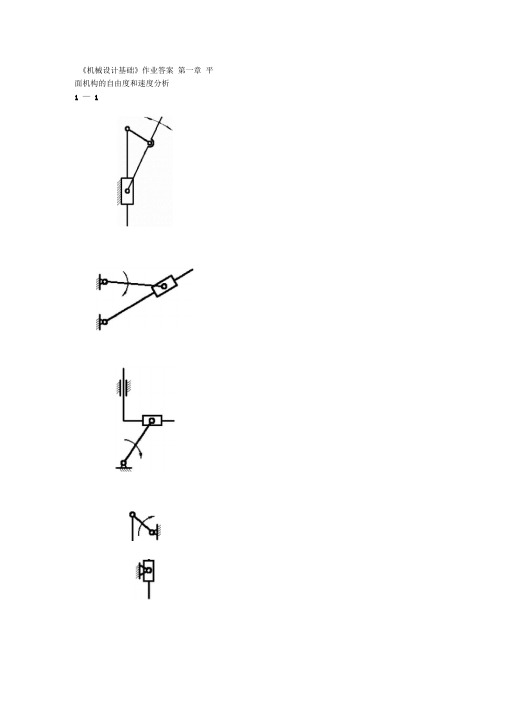
《机械设计基础》作业答案第一章平面机构的自由度和速度分析1 —1自由度为:F =3n _(2P L +P H _P') _F' =3 7 -(2 9 1-0) -1二21-19 -1=1或:F =3n -2P L -P H=3 6 -2 8 -1-11-6自由度为F =3n _(2P L P H _P') _F' =3 9-(2 12 1 -0) -1 =1或:F =3n -2P L - F H=3 8-2 11-1=24-22 -1=11 —10自由度为:F =3n _(2P L +P H _P') _F' =3 10-(2 14 12 -2) -1 = 30 -28 -1=1或:F =3n-2P L - P H=3 9-2 12-1 2=27-24 -2=11 — 11F =3n -2P L -P H=3 4 -2 4 -2=21 — 13:求出题1-13图导杆机构的全部瞬心和构件R4 p 3 P34 R3 1、3的角速度比。
1 - 14:求出题1-14图正切机构的全部瞬心。
设 •= =10rad/s ,求构件3的速度v 3 。
v 3 =v P13 =叫 P 14P 3 =10^200 = 2000mm/s1- 15:题1-15图所示为摩擦行星传动机构,设行星轮2与构件1、4保持纯滚动接触,试用瞬心法求轮1与轮2的角速度比「1/「2。
构件1、2的瞬心为P 12P 24、P 14分别为构件2与构件1相对于机架的绝对瞬心⑷ 1 沃 P 14p 2 =切2 “ !~24 P 12 4-13 P3PP1 3创|P 24p 2| 2r 2 ⑷ 2 IR 4P 12I r i=10 AC tan BCA 916.565mm/s :2.9rad / s转中心的距离l AC =15mm , I AB = 90mm ,^10rad /s ,求『-00和『-1800时,从动件角速度-'2的数值和方向。
机械设计基础-习题解答
《机械设计基础》习题解答机械工程学院目录第0章绪论-------------------------------------------------------------------1 第一章平面机构运动简图及其自由度----------------------------------2 第二章平面连杆机构---------------------------------------------------------4 第三章凸轮机构-------------------------------------------------------------6 第四章齿轮机构------------------------------------------------------- -----8 第五章轮系及其设计------------------------------------------------------19 第六章间歇运动机构------------------------------------------------------26 第七章机械的调速与平衡------------------------------------------------29 第八章带传动---------------------------------------------------------------34 第九章链传动---------------------------------------------------------------38 第十章联接------------------------------------------------------------------42 第十一章轴------------------------------------------------------------------46 第十二章滚动轴承---------------------------------------------------------50 第十三章滑动轴承-------------------------------------------- ------------ 56 第十四章联轴器和离合器------------------------------- 59 第十五章弹簧------------------------------------------62 第十六章机械传动系统的设计----------------------------65第0章绪论0-1机器的特征是什么?机器和机构有何区别?[解] 1)都是许多人为实物的组合;2)实物之间具有确定的相对运动;3)能完成有用的机械功能或转换机械能。
机械设计基础第二章参考答案
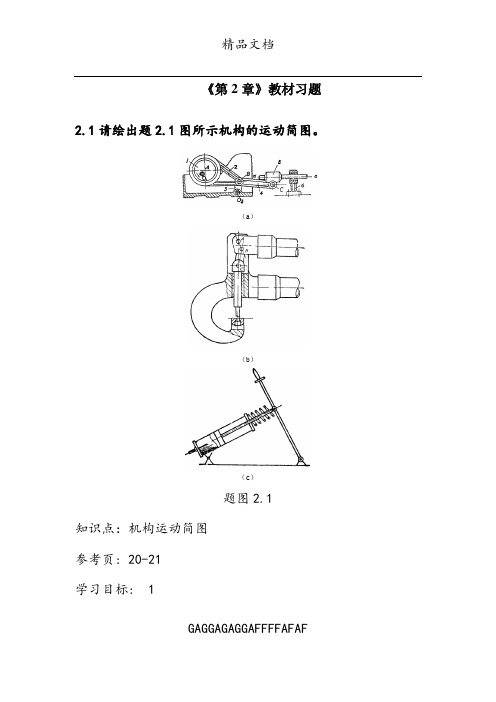
《第2章》教材习题2.1请绘出题2.1图所示机构的运动简图。
(a)(b)(c)题图2.1知识点:机构运动简图参考页: 20-21学习目标: 1GAGGAGAGGAFFFFAFAF题型:图解难度:2解:按表2.1选择、确定机构运动副的符号;将运动副部件的符号按图中同样比例绘制在纸上。
GAGGAGAGGAFFFFAFAF(a)(b)(c)题解图2.2指出题2.2图中运动机构的复合铰链、局部自由度和虚约束,并计算这些机构自由度,并判断它们是否具有确定的运动(其中箭头所示的为原动件)。
GAGGAGAGGAFFFFAFAF(a)(b)(c)(d)GAGGAGAGGAFFFFAFAF(e)(f)图2.16答:(a)机构原动件数为1,等于机构自由度,故机构运动确定。
(b)机构原动件数为1,等于机构自由度,故机构运动确定。
(c)机构原动件数为1,等于机构自由度,故机构运动确定。
(d)机构原动件数为2,大于机构自由度,故机构运动不确定。
(e)机构原动件数为1,小于机构自由度,故机构运动不确定。
(f)机构原动件数为1,等于机构自由度,故机构运动确定。
知识点:自平面机构自由度计算、机构具有确定运动的条件、复合铰链、局部自由度、虚约束GAGGAGAGGAFFFFAFAFGAGGAGAGGAFFFFAFAF参考页: 23-27学习目标:3、4、5题型:计算难度:3解:(a )9n =,12l P =,2h P =,339212121l h F n P P =--=⨯-⨯-⨯=B 处为复合铰链,D 处为局部自由度,机构原动件数为1个,等于机构自由度,故机构运动确定。
(b )4n =,5l P =,1h P =,33425111l h F n P P =--=⨯-⨯-⨯=A 处为虚约束。
机构原动件数为1,等于机构自由度,故机构运动确定。
(c )9=n ,12=l P ,2=h P ,121229323=-⨯-⨯=--=h l P P n FM 处为复合铰链,C 处为局部自由度,G 处为虚约束,因机构原动件数为1,等于机构自由度,故机构运动确定。
王大康机械设计基础-课件 及 参考答案
转动心轴受对称 循环弯曲应力
T1-轴转动周期
双向回转齿轮齿根受 对称循环弯曲应力
单向回转齿轮齿根受 脉动循环弯曲应力
T1-齿轮受力周期
齿面受脉动循环 接触应力
T1-轮齿受力周 期
外圈滚道表面受脉 动循环接触应力
T1-外圈滚道表面 受力周期
四、复习题
1.是非题
(1) 受静载荷作用的零件中产生的应力称为静应力。 ( )
四、复习题
(7) 对具有下述功用的机器各举出两个实例: ① 原动机; ② 将机械能变换为其他形式能量的机器; ③ 传递物料的机器; ④ 传递机械能的机器。
(8) 什么是机械设计中的三化?它有什么意义? (9) 以自行车为例说明如何推行系列化、通用化和标准化? (10) 设计机器应满足哪些要求? (11) 机器的机架可用铸铁、铸钢、铸铝或钢板焊接而成,分析 它们的优缺点和适用场合。 (12) 机械设计的基本要求是什么? (13) 通过本课程学习应达到哪些要求?
① 机器的主体是若干机构的组合; ② 用于传递运动和动力; ③ 具有变换和传递能量、物料和信息的功能。 (3) 机构的特征: ① 机构是若干构件的组合; ② 各构件间具有确定的位置。 (4) 机器和机构的不同点:机构不具有变换能量、物 料、信息的功能。 (5) 构件和零件:构件是运动的单元;零件是制造的 单元。
二、学习指导
3. 机械设计 (1) 机械设计应满足的基本要求是:使用要求、经 济性要求、人机和环境的要求、可靠性要求等。 (2) 机械设计的一般过程:
一般机械产品的设计分为以下几个阶段: ① 产品规划阶段:制定出机器的设计任务书。 ② 方案设计阶段:拟定机器的总体布置、传动方案 和机构运动简图等。 ③ 技术设计阶段:完成全部图样、说明书等技术文 件。 ④ 施工设计阶段:制定工艺规划,完成生产准备。 ⑤ 投产和售后服务。
机械设计基础课后习题答案--【完整版】

第三章部分题解参考3-5 图3-37所示为一冲床传动机构的设计方案。
设计者的意图是通过齿轮1带动凸轮2旋转后,经过摆杆3带动导杆4来实现冲头上下冲压的动作。
试分析此方案有无结构组成原理上的错误。
若有,应如何修改?习题3-5图习题3-5解图(a) 习题3-5解图(b) 习题3-5解图(c) 解 画出该方案的机动示意图如习题3-5解图(a),其自由度为:14233 2345=-⨯-⨯=--=P P n F其中:滚子为局部自由度计算可知:自由度为零,故该方案无法实现所要求的运动,即结构组成原理上有错误。
解决方法:①增加一个构件和一个低副,如习题3-5解图(b)所示。
其自由度为:115243 2345=-⨯-⨯=--=P P n F②将一个低副改为高副,如习题3-5解图(c)所示。
其自由度为:123233 2345=-⨯-⨯=--=P P n F3-6 画出图3-38所示机构的运动简图(运动尺寸由图上量取),并计算其自由度。
习题3-6(a)图 习题3-6(d)图解(a) 习题3-6(a)图所示机构的运动简图可画成习题3-6(a)解图(a)或习题3-6(a)解图(b)的两种形式。
自由度计算:1042332345=-⨯-⨯=--=P P n F习题3-6(a)解图(a)习题3-6(a)解图(b)解(d) 习题3-6(d)图所示机构的运动简图可画成习题3-6(d)解图(a)或习题3-6(d)解图(b)的两种形式。
自由度计算:1042332345=-⨯-⨯=--=P P n F习题3-6(d)解图(a) 习题3-6(d)解图(b)3-7 计算图3-39所示机构的自由度,并说明各机构应有的原动件数目。
解(a)1010*******=-⨯-⨯=--=P P n FA 、B 、C 、D 为复合铰链原动件数目应为1说明:该机构为精确直线机构。
当满足BE =BC =CD =DE ,AB =AD ,AF =CF 条件时,E 点轨迹是精确直线,其轨迹垂直于机架连心线AF解(b)1072532345=-⨯-⨯=--=P P n FB 为复合铰链,移动副E 、F 中有一个是虚约束 原动件数目应为1说明:该机构为飞剪机构,即在物体的运动过程中将其剪切。