机器人无线远程控制系统的人机接口_王晓亨
基于WiFi远程控制的智能监控机器人系统设计
基于WiFi远程控制的智能监控机器人系统设计作者:瑚琦雷航夏志迁来源:《软件导刊》2018年第08期摘要:设计一种基于WiFi远程控制的智能监控机器人系统,包括硬件系统、软件系统以及控制算法。
机械结构利用SolidWorks建模,通过3D打印成型;硬件电路采用模块化设计思想,以STM32F407VGT6微控制器为控制核心,外围分布各功能模块;软件系统由下位机的μC/OS II嵌入式实时操作系统协同处理多任务,通过TCP/IP协议与上位机的手机端APP控制平台,以及PC机控制平台进行数据传输与交互。
机器人控制遵循ZMP算法,通过对上位机指令的预执行及姿态解算使机器人稳定运动。
应用实践表明,机器人组装方便、结构稳固,实现机器人与终端设备的视频、指令同时传输,在其行走、跟踪以及循迹过程中能保持稳定。
系统设计方法可靠、切合实际,控制平台稳定、易用性强。
关键词:智能机器人;WiFi;视频传输;图像识别;ZMP;路径规划DOIDOI:10.11907/rjdk.173299中图分类号:TP301文献标识码:A 文章编号:1672-7800(2018)008-0061-04英文摘要Abstract:An intelligent monitoring robot system based on WiFi remote control is proposed including hardware system,the software system and its control algorithm.The mechanical structure is modeled via SolidWorks and printed by the 3D printer.The circuit system takes the advantages of modularization design idea and uses microcontroller STM32F407VGT6 as the control core.Peripheral circuits are distributed around the control core.The software platform design contains the μC/OS II embedded real-time multitasking operating system,mobile phone client APP control platform and computer control platform.The embedded system transmits and interacts with the upper computer through the TCP/IP.The robot control follows the ZMP algorithm which requires the upper computer to perform pre-execution and attitude algorithm,so that the robot can maintain stability during the movements.Based on mass of practice,it is demonstrated that the robot is easy to assemble,and the video and instruction can be transmitted simultaneously between the robot and terminal equipment.In the meantime,the robot can be stable during walking and tracking,and the controlling platform is stable and can be easily used.英文关键词Key Words:intelligent robot;WiFi;video transmission; image recognition;ZMP; path planning0 引言近年来,随着智能机器人研究的不断深入,人形智能机器人在娱乐、服务、救援等领域有着潜在应用价值[1-2]。
一种具有WiFi无线通讯的总线式工业机器人控制系统[发明专利]
![一种具有WiFi无线通讯的总线式工业机器人控制系统[发明专利]](https://img.taocdn.com/s3/m/6aca03a5e518964bce847c15.png)
专利名称:一种具有WiFi无线通讯的总线式工业机器人控制系统
专利类型:发明专利
发明人:汪军,王晓娟
申请号:CN202010910872.7
申请日:20200902
公开号:CN112015120A
公开日:
20201201
专利内容由知识产权出版社提供
摘要:本发明公开了一种具有WiFi无线通讯的总线式工业机器人控制系统,涉及工业控制技术领域,包括wifi信号模块,包括wifi信号模块、计算机控制模块、机器人控制模块、反馈模块、伺服驱动模块、检测模块、控制器组件,所述控制器组件包括壳体、连接插头本体,所述壳体内安装有控制器元件,所述壳体的侧壁开设有多个定位槽,多个所述定位槽内均滑动连接有定位块,通过检测扫描单元,实现了对加工零件的扫描工作,通过数量计算单元实现了对加工质量不合格零件的记录,当连续四个加工零件不合格的情况发生,会命令报警单元发射报警信号,报警信号在传输信号的过程中,会给与自动停止单元下达指令,实现了对伺服驱动模块工作的停止命令。
申请人:江苏安全技术职业学院
地址:221011 江苏省徐州市云龙区东郊东甸子
国籍:CN
代理机构:郑州豫原知识产权代理事务所(普通合伙)
代理人:李保林
更多信息请下载全文后查看。
机器人无线远程控制系统的人机接口

究 热 点 ,随着无 线 网络 技 术 的发 展 和 日益 成 熟 , 使
得基 于无线 网 络的远 程控 制技术 的研究 得到 了极 大
的关 注 。
利用 V + C+ 设计 了一套 以移动机 器人 为复 杂 控 制对象 ,在 无 线 局 域 网 环 境 下 模 拟 广 域 网 络 的 特
被 控 的机 器 人 采 用 了 美 国 A tm d o t s ev e i R bi i a o c
公司的 P 3一D X多 功 能智 能 移 动 机 器人 , 配备 了 它 车 载计算 机 ( 装有无 线 网卡 、 视频 采集 卡 )带抓 手 的 、
收稿 日期 :20 06一o 8一O 8 基金项 目:国家 8 3 6 重点课题资助项 目(03 A 50 1 2 A 7 52 ) 0 作 者 简 介 : { 亨 (91一) 男 , 士 研究 生 。 主要 从 事 网络 与控 制 i 晓 18 , 硕
Ab ta t Th e e r h p a om frmoe d sa e c n rltc n lg fsmuai g te c a a tr fItme sr c : e rs ac lt r o e t itnc o to e h oo yo i ltn h h r ce so e t f n c mmu iain i sa ls e n wiee s lc lae ewok.T e o e ao a i c y s n o to n t c o n c to s e tb ih d i rls o a a n t r h p r tr c n dr d e d c n rl isr — r s e u t n o t e rmoe r b t n d ve t e fe b e e tt aa tr u h t e vs a ie n—ma hn ne a e, i s t e t o o ,a iw e d a k d sae d t h o g iu l d ma o h h h z c ie i tr c f
机器人远程控制操作指南的说明书

机器人远程控制操作指南的说明书操作指南欢迎使用本机器人远程控制系统。
本指南将向您介绍如何使用远程控制系统来操纵机器人。
请按照以下步骤进行操作。
1. 连接机器人首先,确保您的机器人已正确连接到远程控制系统。
将机器人与控制系统的无线网络进行配对。
确保机器人和控制系统处于同一网络环境下。
2. 打开控制系统启动控制系统,并确保其与机器人连接成功。
您可以通过输入机器人的IP地址或扫描机器人上的二维码来连接机器人。
3. 手动控制在控制系统界面上,您可以看到机器人的各项功能按钮。
通过点击相应按钮,您可以手动控制机器人的移动、摄像头的旋转以及其他预设功能。
4. 远程控制除了手动控制外,您还可以通过远程控制机器人。
在控制系统界面上,您可以看到一个远程控制模式按钮。
点击该按钮,然后选择您想要远程控制机器人的方式。
5. 视频传输在远程控制模式下,您可以实时观看机器人的视频传输。
您可以通过控制系统界面上的摄像头控制按钮调整摄像头的角度,以获得最佳视角。
同时,系统还支持截图和录制视频的功能。
6. 路径规划远程控制系统还支持机器人的路径规划功能。
您可以在控制系统界面上点击路径规划按钮,并在地图上指定机器人应该前往的目的地。
系统将自动生成最佳路径,并指导机器人自动前往。
7. 安全控制为了保证机器人操作的安全性,远程控制系统还具备安全控制功能。
您可以在系统界面上设置机器人的运动范围、速度以及特定区域的禁入区等。
通过合理设置这些参数,可以确保机器人在操作过程中不会造成危险。
8. 系统设置控制系统还提供了一些个性化设置选项供用户选择。
您可以根据需要调整系统语言、界面主题和声音提示等。
系统还可以记录机器人的操作日志,方便您进行后期分析和调整。
总结机器人远程控制操作指南为用户提供了一份详细的使用手册。
通过本指南,用户可以了解到如何连接机器人、手动控制、远程控制、视频传输、路径规划、安全控制以及系统设置等相关功能。
希望本指南能够帮助用户顺利使用远程控制系统,并充分发挥机器人的各项功能。
机器人网络连接说明书

机器人网络连接说明书一、概述本说明书旨在向用户提供机器人网络连接的相关指导和操作步骤。
通过正确连接机器人到网络,用户可以实现对机器人的远程控制和管理,以及享受更多的智能化功能。
二、准备工作1. 确认网络环境:请先确保您的网络环境能够满足机器人连接的要求。
通常情况下,您需要拥有一个可稳定接入互联网的宽带网络,并提供给机器人一个可以正常工作的无线网络信号。
2. 检查机器人设置:在开始连接前,请确保机器人已经接通电源并处于待机状态。
同时,确保机器人的网络设置功能已经被打开。
三、无线网络连接步骤1. 打开机器人网络设置功能:根据您使用的机器人型号和品牌不同,操作步骤可能稍有差异。
请查阅机器人的用户手册或者访问相关官方网站,获取准确的操作指导。
2. 搜索可用网络:机器人会自动搜索附近的无线网络信号,请确保机器人所在的位置信号覆盖良好,并且您的无线路由器已经正常工作。
3. 选择并连接网络:根据机器人界面提示,在搜索到的网络列表中选择您要连接的网络,并输入正确的网络密码进行连接。
4. 等待网络连接成功:机器人会进行自动连接并验证网络设置,请耐心等待连接成功的提示。
四、验证网络连接1. 检查连接状态:在机器人连接网络成功后,您可以查看机器人显示屏或者指示灯的状态来验证连接是否正常。
2. 连接其他设备:您可以尝试使用其他设备连接同一网络,并通过网络访问机器人的IP地址来进一步验证网络连接是否成功。
五、常见问题解决办法1. 连接失败:如果机器人不能成功连接到网络,请检查您输入的网络密码是否正确,或者将机器人靠近路由器以获得更好的信号强度。
2. 连接中断:如果机器人在使用过程中时常断开连接,请检查您的无线网络环境是否稳定,或者尝试重新连接网络。
3. 其他问题:如果您在网络连接过程中遇到其他问题,请参阅机器人的用户手册或者咨询机器人厂家的技术支持。
六、安全与隐私在连接机器人到网络时,请确保您的网络设置处于安全状态,以防止未经授权的访问。
远程无线控制可视救援机器人系统的设计与实现_毕业论文

作品名称:远程无线控制可视救援机器人系统的设计与实现《远程无线控制可视救援机器人系统的设计与实现》摘要:该系统是基于达盛51平台、无线控制模块、六自由度机械手、无线摄像头和动力部分构成的救援机械人模拟系统,达盛51平台作为机械人的总控制平台,它包括机械手的控制程序和无线控制程序,它主要完成机械手各电机和动力部分电机控制工作,可以模拟夹取和搬运物体,以模拟完成在求援过程中,可以远程可视监控控制,完成在一些危险的救援环境中进行救援。
关键字:达盛;51平台;无线;机械手;摄像头;救援Abstract: the system is based on wireless platform of shing 51 control module, six degrees of freedom, wireless webcam and dynamic manipulator of rescue robot simulation system, cheng 51 total control platform for robot platform, including the control of the manipulator procedures and wireless control program, which mainly completes each motor and dynamic part of manipulator can be simulated, motor control work and handling objects, with complete with simulation process, can aid in remote video monitor and control in some dangerous rescue environment.Key words: dasheng;51 platform;Wireless;Manipulator;Cameras;rescue一、作品简介该作品的设计思路来源于目前经常发生矿难、火灾、有毒环境、地震等灾难救援,用人去救援当然是最灵活机动的,但是救援之前,必须要考虑到救援人员的安全问题,不得不考虑不但救不出人,反而出现更大的伤亡,如果我们采用救援机械人,装上先进的各类传感器、生命探测器,安装先进的多角度的可视设备,救援人员远程可视控制,加装灵活有力的机械臂和其他救援设备,这样既保证了人的随机应变,同时机械人可携带更多的救援设备,就算在救援过程中万一出现塌方,也许我们的机械人会更能体现他的伟大,可以用他的钢铁之身顶住,我救援争取一定的时间,起码这样不会增加伤亡人员。
基于无线网络的移动机器人远程控制系统设计与实现
“
cmbig c f e o” 剑桥 咖 啡壶 ” 它 由剑桥 大学 a r eof p t “ d e 。
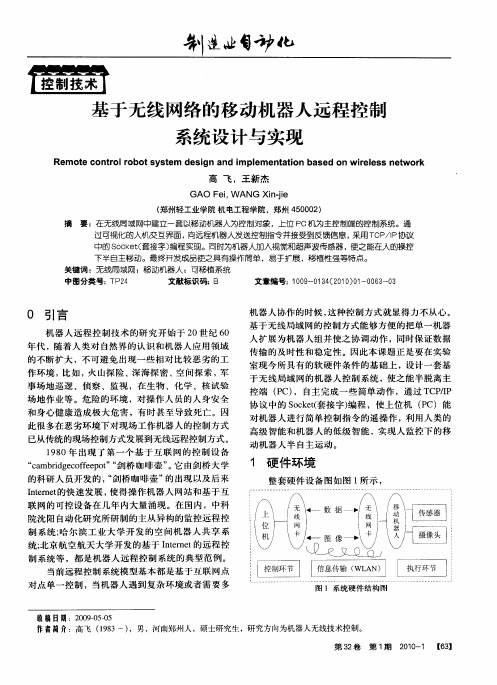
1 硬件环 境
整 套硬 件设 备 图如 图 1 所示 ,
的科 研人 员开 发 的 , 剑桥 咖 啡壶 ” 出现 以及 后来 “ 的 Itre的快速 发 展 , nen t 使得操 作 机器 人 网站 和基 于互
3 无线通信系统
高级 智 能和机 器 人 的低级 智 能 , 现人 监控 下 的移 实 动 机 器 人半 自主 运动 。
场 地 作业 等 。危 险 的环境 ,对操 作人 员的人 身安 全 和身 心健 康造 成极 大危 害 ,有时 甚至 导致 死亡 。因 此很 多在 恶劣环 境下 对现 场工 作机 器人 的控 制 方式 已从传统 的现场控 制方式发 展到无 线远程控 制方式 。
了无 线路 由器 ,从 而加 强 了信 号强 度 、扩 展 了信 号 无线 传输 距离 。 车载 P C采用 威盛 E I -7 0系列 Pc ・ X嵌 PA P 0 ioI T 入式 主板 ,扩展 接 口多 ,尺寸 小 ,功耗 低 ,采用嵌 入式 主板 一方面 节 省 了开 发时 间 ,另一方 面增加 了 系统 的稳 定性 ,在此主 板上 自行 添加 了视 觉传感 器 和超 声波 传感器 ,丰 富移 动机 器人 各方面 的功 能 。
人 扩展 为机 器 人组 并 使之 协调 动作 ,同时保 证数 据
传 输 的及 时性 和稳 定性 。因此本 课 题正 是要 在实 验
作 环境 ,比如 ,火 山探 险 、 深海 探 密 、空 间探 索 , 军
事 场地 巡逻 、侦 察 、监视 ,在 生 物 、化 学 、核试 验
基于互联网的机器人远程实验系统
求大压缩比,因为对于采用 PSTN 或I SDN 方式上 网的情况来说,网络提供的带宽往往非常窄(28 .8 kbS PSTN ,33 .6 kbpS PSTN ,p !64 kbpS I SDN 等) 且往往波动较大。视频压缩编码器的选择直接影响
视频传输的质量。由编码器输出的压缩后的图像数
据加上数据包头封装成包即可发送出去。在这里我
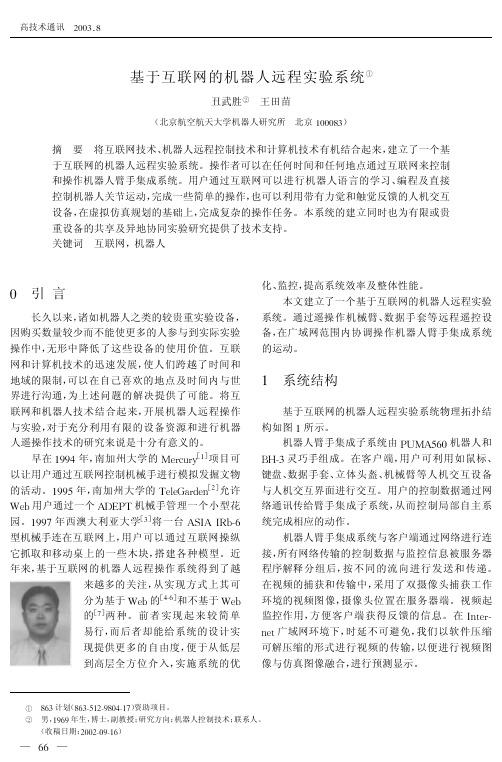
图8 为服务器端机器人臂手集成系统。图9 所 示为用户利用人机交互设备进行抓杯倒水的实验, 用户控制机器人抓住桌面上的杯子,然后将水倒入 另一个杯中,在用户操作过程中还可以与实验室操 作人员有语音的交流。图10 为抓杯倒水的虚拟仿 真规划。图11 所示为用户通过普通界面来进行编 程或直接控制机器人关节运动。ห้องสมุดไป่ตู้
RDTP 协议将图像帧序列组成连续的数据流, 以适当的分组,并且加上时间戳(Ti me sta mp ),发送 到客户方,供客户方播放。我们设计的基点放在普
通的PsTN 上网方式上,数据的传输错误一般只出 现在网路状况拥挤上。客户端只需把错误的数据包
— 67 —
高技术通讯 2003. 8
丢掉即可,不需重发。 服务器方数据的获取是通过 CCD 摄像头获得
机器人工作现场的图像,经由视频捕捉卡,将 PAL 或 NTSC 制式的图像转化成24 位的帧彩色位图图 像,然后对图像进行色度、亮度的调节,以及尺寸的 放缩,将图 像 送 入 视 频 编 码 解 码 器,对 图 像 进 行 压 缩。在这一环节,必须对运动图像进行合适的压缩。 为了适应网络有限的带宽,视频图像的压缩必须要
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
中图分类号:TP393 文献标识码:A 文章编号:1009-2552(2007)01-0001-03机器人无线远程控制系统的人机接口王晓亨,陆宇平(南京航空航天大学自动化学院,南京210016)摘 要:在无线局域网环境中,建立了一套以移动机器人为控制对象的、模拟Internet传输特征的远程控制技术研究平台。
通过可视化的人机接口界面,可以直接向远端机器人发送控制指令,并能看到反馈的状态数据;还可通过手柄控制,语音控制、命令集可编程接口等方式控制机器人。
最后的开发实例具有操作简便、界面友好、易于扩展等特点。
关键词:人机接口;Speec h API;机器人Man-machine interface of robot wirless remotedistance control systemWANG Xiao-heng,LU Yu-ping(College of Auto mation,Nanjing University of Aeronautics and Astronautics,Nanjing210016,C hina) Abstract:The research platform of remote distance control technology of simulating the characters of Internet communication is established in wireless local area network.The operators can directly send control instr uc-tions to the remote robot,and vie w the feedbacked state data through the visualized man-machine interface, also can control the r emote robot by handle c ontr ol,speech control,pr ogrammable command sets and so on.The instance has some advantages such as convenient operation,friendly interface,adapted extension.Key words:man-machine interface;Speech API;robot0 引言近年来,基于Internet的远程控制技术是一个研究热点,随着无线网络技术的发展和日益成熟,使得基于无线网络的远程控制技术的研究得到了极大的关注。
利用VC++设计了一套以移动机器人为复杂控制对象,在无线局域网环境下模拟广域网络的特征,用软件的方式人为再现不确定性时延,数据传输丢失等网络现象的远程技术研究平台。
并利用该开发平台建立一套面向无线网的机器人远程控制系统。
该平台通过可视化的人机接口界面可方便的进行操作和进一步的研究。
1 硬件环境如图1所示,在实验室内搭建了无线网络环境,无线路由器通过其广域连接端口连接到校园网,并能通过校园网访问Internet,从而构成了一个广域网系统。
机器人通过其车载计算机上的无线网卡与实验室内的无线局域网互联,可以实现从网络的任何节点来远程控制机器人。
图1 硬件结构被控的机器人采用了美国Activmedia Robotics 公司的P3-DX多功能智能移动机器人,它配备了车载计算机(装有无线网卡、视频采集卡)、带抓手的收稿日期:2006-08-08基金项目:国家863重点课题资助项目(2003AA755021)作者简介:王晓亨(1981-),男,硕士研究生。
主要从事网络与控制等方向的研究。
DOI:10.13274/ ki.hdzj.2007.01.0015自由度手臂、水平转动倾斜摄像头、4组共16个声纳。
2 人机接口的实现机器人远程控制系统中的人机接口技术从本质上来讲就是通过什么样的方式来发送控制指令和进行状态数据的反馈。
除了提供传统的图形化人机界面,还提出了一些新的人机接口技术,对人与移动机器人更自由灵活的合作进行了初步的探讨。
2.1 图形化人机界面目前在机器人远程控制系统的开发中采用的最多也是最基本的方法即提供一个简单、易操作的图形化人机界面。
该界面上提供各种控制按钮、控件,用户通过点击这些按钮发送命令给远端的机器人。
接口界面要提供足够的信息使问题容易理解,同时尽可能地传输最少的数据,以及拥有简单的接口界面布局。
同时还提供机器人状态数据的图像化显示。
对于本文的机器人无线远程控制系统,由于其是一个开发式的研究型环境,需要不断的扩展。
系统的功能也将不断增加,复杂性也同时在增高。
面对可能是对机器人控制没有经验的人员,在基于系统复杂性的前提下,如何使图形界面更具友好性就成为系统设计中重要的课题,它将影响用户的操作行为,甚至是系统的安全。
在设计机器人无线远程控制系统的远程控制端的图形化接口界面时,将考虑以下原则:(1)界面必须具有交互性和智能性。
良好的接口设计大多有一个交互式处理机制。
现有的网络远程机器人系统,如Xa vier的人机交互方式虽然简单易操作,但实现功能单一,没有充分体现机器人的自主性及与人的智能融合。
要使用户能远程控制机器人并完成一系列复杂动作,就需要使用更先进的技术来实现复杂而且友好的用户界面,以提高其交互性。
(2)界面应简单、清晰、易理解和易操作。
将机器人的动力学、异常性以及活动空间边界的复杂性对用户隐藏,同时,仍然允许灵活的操作封装。
并且尽量滤掉各种非常复杂的因素。
在不丢失任何有用功能的情况下,尽量简化对机器的控制。
(3)界面提供用户操作远程机器人的功能应尽可能详细和可靠。
功能的完整与界面的简洁是一个比较矛盾的东西,如何较好的协调这两个要求是图形化界面设计的一个难点。
2.2 手柄控制通过使用手柄来实现对机器人的远程控制突破了传统的使用鼠标点击图形界面的做法,有着比使用鼠标无法比拟的便捷和真实控制的感受。
通过使用手柄,就像驾驶着汽车一样,实现对机器人的远程控制,便于用户连续的调整机器人的位姿和行动,并更具远程控制的真实感。
要在机器人远程控制系统中实现手柄的控制,需要对手柄的接口(串口、并口、USB等)进行编程,还有一个比较容易实现的方法就是使用工具软件JoyToKey来实现。
JoyToKey可以实现将手柄上的按键和键盘上的按键相对应的功能,即按了手柄上的某个键相当于按了键盘上对应的一个或几个键。
因此在软件编程时只需在代码中加入对键盘按键的响应就可实现手柄控制的功能。
而键盘按键响应可以通过调用Win32API函数RegisterHotKey注册系统热键的方法实现。
2.3 移动式便携设备为了实现远程控制端的移动性,可以采用便携式设备作为远程控制端的硬件平台。
这些设备可以是安装了无线网卡的可编程的PDA,还可以是专门为机器人远程控制系统设计和开发的嵌入式设备。
这些设备具备的基本特征就是需要有无线网络接入接口、支持Socket编程、显示屏、嵌入式操作系统(支持多线程)。
只有具备了上述特征的设备才能实现具有移动性的远程控制平台的功能。
2.4 语音控制机器人的语音控制就是远程用户通过输入自然语言命令来控制机器人的功能。
目前语音控制技术在汽车电子、飞机控制系统、军事指挥系统、医疗系统已经有了一定的研究和应用。
利用语音进行远程控制,有效的利用了人类的语言能力,解放了人类的手,充分的调动了手、耳、口等器官,使人机交互更为自然、有效、方便和分工明确。
语音控制的核心就是语音识别技术。
语音识别以语音为研究对象,它是语音信号处理的一个重要研究方向,是模式识别的一个分支,涉及到生理学、心理学、语言学、计算机科学以及信号处理等诸多领域,其最终目标是实现人与机器进行自然语言通信。
现在应用较为广泛的语音识别算法有动态时间规划、离散隐马尔可夫模型、连续隐马尔可夫模型、人工神经网等。
本文设计的机器人无线远程控制系统将采用微软公司推出的语音识别开发包Speech API(以下简写为SAPI)。
SAPI提供了语音识别与语音合成的接口。
图2是语音远程控制在系统中的结构图。
该结构位于远程控制端,虚线框内的即为语音控制模块。
语音识别引擎首先装载语法规则(XML 格式的语音和实际命令的匹配表)。
当用户输入语音命令时,引擎将根据语法规则识别出对应的字符指令然后发给指令发送模块进行发送,以下的流程和远程控制端的设计流程是一致的。
因此语音控制模块相当于在远程控制端加上了一个语音控制指令的接口。
对于利用SAPI 进行开发时具体步骤,可参考SAPI 帮助文档。
图2 语音控制功能结构图在进行语音控制时仍然有一些问题需要解决。
一个是识别率不高的问题。
对于本文设计的远程控制系统,由于指令属于短的词汇型,没有很长的句子,因此识别率相对很高。
如果今后开发纯语言的控制方法时,现有的语音识别技术识别率还达不到设计的要求。
因此语音识别的算法还有待继续研究和发展下去。
另一方面,语音控制受到噪音环境的影响很大,如果周围噪音很大将会严重干扰识别的结果,因此消噪技术也是一个重要的研究方向。
但是总的来说,语音控制技术作为一种人机接口是切实可行的,并有着良好的应用前景。
2.5 命令集可编程接口在远程控制端的图形化界面上提供可编程接口,使用户可自行规划命令集合,用以完成某项任务。
可编程接口提供基本远程控制指令并规定了命令集的文件格式。
用户通过图形化界面并可结合机器人模拟器离线进行命令集的编辑。
当要执行用户设计的命令集任务时,由远程控制端读取命令集文件,依次读取其中的指令以及参数并将其发送到现场控制端执行。
这一可编程接口可以帮助进行系统的功能提升,特别是增加系统完成重复性任务的能力。
它也使非专业用户也可简单编排机器人的运动,可应用于机器人娱乐与教学。
3 人机接口设计实例利用开发库CyLib ,快速的开发出了一套面向无线网的机器人远程控制系统。
图3所示的是远程控制端软件的界面。
该系统实现了机器人本体、机械臂和摄像头的控制、状态数据的显示、声纳罗盘数据图形化显示、以及视频监控等智能控制功能。
图4为手柄控制接口界面,用于启动关闭手柄控制,提示手柄各个按键对应的控制命令等。
图5为命令集控制界面。
提供命令集的编辑、查看与执行等功能。
图3 远程控制端界面图4 手柄控制界面图5 命令集编辑及控制界面在今后的功能扩展过程中,还可以继续在该界面上添加新的控制界面,比如各种智能控制任务的执行界面,也可以直接作为研究人员的试验平台。
研究人员只需将自己的研究成果比如算法嵌入到里面,从而快速验证研究人员的理论成果。
(下转第19页)拉电阻有效#pragma set node sd string“@0.”#include<netdbg.h>#include<snvt rq.h>设定I O对象int vswitch=1;const unsigned long brightness L=280;const unsigned long brightness H=64;network input long nvievalue;network input long nvigvalue;long evalue;network input sd string(“@01.”)SNVT obj request nvi00Request;network output sd string(“@02.”)SNVT obj status nvo00Status;声明triac对象I O4用于输出触发脉冲,I O4用于输入过零检测脉冲,选用6号内部时钟,脉冲上升沿有效;I O0output triac pulse sync(IO4)clock(6) clockedge(+)zeroin;开关打开时triac对象开始运行when(vswitch==1){io out(zeroin,evalue);}接受上层来的NV值when(nv update occurs(nvievalue)){evalue=nvievalue;io out(zeroin,evalue);}网络变量的更新when(nv update occurs(nvigvalue)){if(nvigvalue>brightness H){evalue=320;}else if(nvigvalue<brightness L){evalue=1;}else evalue=nvigvalue2;io out(zeroin,evalue)}reset事件when(reset){ io out(zeroin,327);}把智能调光节点的应用程序装载到Mini E VK 的评估板中,通过I SI(Interoperable Self-installation)协议连接,然后该应用程序就可以利用输入输出网络变量(NV)的更新来与评估板交换数据,并进行测试。