用粒子群算法求解多目标优化问题的Pareto解
一种改进的基于pareto解的多目标粒子群算法

文章编号 :0 6— 3 8 2 1 ) 5— 0 6— 4 10 9 4 (0 0 0 0 9 0
计
算
机
仿
真
20 月 0 年5 1
一
种 改进 的基 于 p rt 的 多 目标 粒 子 群算 法 aeo解
李 纬, 张兴 华
( 南京工业大学 自动化学 院, 江苏 南京 2 00 ) 10 9
摘要 : 研究一种改进的多 目 标粒子群优化算法 , 算法采用精英归档策 略, 利用粒 子的个体最 优定位 , 通过 P r o a t 支配关系更 e 新全体粒子最优位置 , 由档案库 中动态提供。根据 P r o a t支配关系来更新粒子 的个体最优位置。使 用非劣解 目标 的密度距 e 离度量非劣解前端的均匀性 , 通过删除密度距离小 的非劣解提高非劣解前端的均匀性 。从归档 中根据粒子的密度距离大小 依 照概率选取作为粒子的全局最优位置 , 以保持解 的多样性。标 准函数 的仿真实验结 果表明 , 所提算法能够 获得 大量且较
fo t rn.
KE W OR Y DS:a iesam; l —ojcv vl i aya oi m; pia; ya i c w ig Prc w r Mu i bet eeo t nr l rh O t l D n c r dn tl t i uo g t m m o
Байду номын сангаас
1 引 言
粒子群优化算法是由 K n ey和 E ehr提出的一种进 e nd brat
c ie t t g su e hv d s a e y i s d,go a e tp st n i r vd d b o —d mi ae o ui n n t e a c ie a d i dv d a r lb lb s o i o s p o ie y n n i o n td s l t s i h r h v n n ii u o l
多目标多约束优化问题算法

多目标多约束优化问题算法多目标多约束优化问题是一类复杂的问题,需要使用特殊设计的算法来解决。
以下是一些常用于解决这类问题的算法:1. 多目标遗传算法(Multi-Objective Genetic Algorithm, MOGA):-原理:使用遗传算法的思想,通过进化的方式寻找最优解。
针对多目标问题,采用Pareto 前沿的概念来评价解的优劣。
-特点:能够同时优化多个目标函数,通过维护一组非支配解来表示可能的最优解。
2. 多目标粒子群优化算法(Multi-Objective Particle Swarm Optimization, MOPSO):-原理:基于群体智能的思想,通过模拟鸟群或鱼群的行为,粒子在解空间中搜索最优解。
-特点:能够在解空间中较好地探索多个目标函数的Pareto 前沿。
3. 多目标差分进化算法(Multi-Objective Differential Evolution, MODE):-原理:差分进化算法的变种,通过引入差分向量来生成新的解,并利用Pareto 前沿来指导搜索过程。
-特点:对于高维、非线性、非凸优化问题有较好的性能。
4. 多目标蚁群算法(Multi-Objective Ant Colony Optimization, MOACO):-原理:基于蚁群算法,模拟蚂蚁在搜索食物时的行为,通过信息素的传递来实现全局搜索和局部搜索。
-特点:在处理多目标问题时,采用Pareto 前沿来评估解的质量。
5. 多目标模拟退火算法(Multi-Objective Simulated Annealing, MOSA):-原理:模拟退火算法的变种,通过模拟金属退火的过程,在解空间中逐渐减小温度来搜索最优解。
-特点:能够在搜索过程中以一定的概率接受比当前解更差的解,避免陷入局部最优解。
这些算法在解决多目标多约束优化问题时具有一定的优势,但选择合适的算法还取决于具体问题的性质和约束条件。
粒子群算法怎么寻找帕累托解集的

粒子群算法怎么寻找帕累托解集的(实用版)目录一、粒子群算法概述二、帕累托解集的概念三、粒子群算法在寻找帕累托解集中的应用四、粒子群算法的优缺点五、总结正文一、粒子群算法概述粒子群算法(Particle Swarm Optimization,简称 PSO)是一种基于群体智能的优化算法,属于进化算法的一种。
它通过模拟粒子在搜索空间中的移动和相互作用,以寻找最优解。
粒子群算法的优点在于其简单易行、收敛速度快以及全局搜索能力较强。
二、帕累托解集的概念帕累托解集(Pareto Set)是指在多目标优化问题中,一组解的集合,其中任意一个解都是最优的,即不存在比它更优的解。
寻找帕累托解集是多目标优化中的一个重要问题。
三、粒子群算法在寻找帕累托解集中的应用粒子群算法在寻找帕累托解集中的应用主要体现在以下几个方面:1.初始化粒子群:根据问题特点,随机生成初始粒子群。
2.评估适应度:对于每个粒子,计算其对应的解的适应度值,用于后续的粒子更新。
3.更新粒子速度和位置:根据粒子的当前速度、位置以及全局最优和个体最优解,更新粒子的速度和位置。
4.检查停止条件:当达到预设的最大迭代次数或全局最优解的适应度值满足预设的阈值时,停止迭代。
5.返回解集:将达到全局最优解的粒子对应的解集合作为帕累托解集的解。
四、粒子群算法的优缺点粒子群算法的优点有:1.简单易行:粒子群算法的规则简单,容易实现。
2.收敛速度快:粒子群算法具有较快的收敛速度,能在较短时间内找到较优解。
3.全局搜索能力较强:粒子群算法中的粒子可以随着搜索空间的变化而调整其速度和位置,具有较强的全局搜索能力。
粒子群算法的缺点有:1.容易陷入局部最优:粒子群算法在寻找最优解的过程中,可能会陷入局部最优解,导致无法找到全局最优解。
2.算法稳定性受影响:粒子群算法中的惯性权重在迭代过程中线性下降,可能导致算法稳定性受到影响。
五、总结粒子群算法作为一种基于群体智能的优化算法,在寻找帕累托解集方面具有一定的优势。
python 多目标粒子群算法
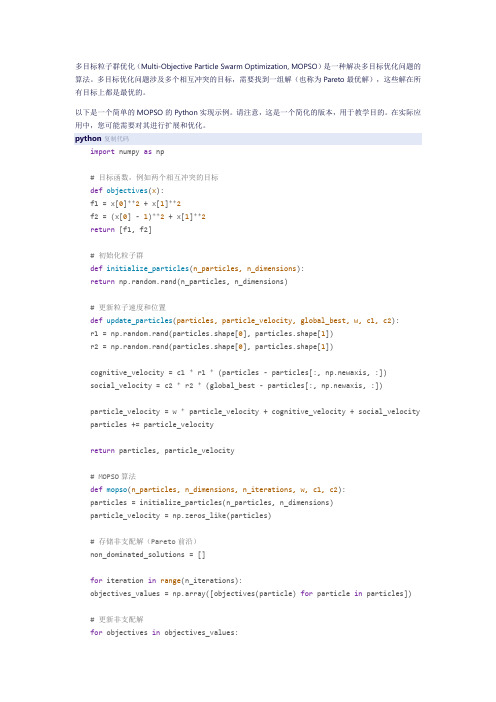
多目标粒子群优化(Multi-Objective Particle Swarm Optimization, MOPSO)是一种解决多目标优化问题的算法。
多目标优化问题涉及多个相互冲突的目标,需要找到一组解(也称为Pareto最优解),这些解在所有目标上都是最优的。
以下是一个简单的MOPSO的Python实现示例。
请注意,这是一个简化的版本,用于教学目的。
在实际应用中,您可能需要对其进行扩展和优化。
python复制代码import numpy as np# 目标函数,例如两个相互冲突的目标def objectives(x):f1 = x[0]**2 + x[1]**2f2 = (x[0] - 1)**2 + x[1]**2return [f1, f2]# 初始化粒子群def initialize_particles(n_particles, n_dimensions):return np.random.rand(n_particles, n_dimensions)# 更新粒子速度和位置def update_particles(particles, particle_velocity, global_best, w, c1, c2):r1 = np.random.rand(particles.shape[0], particles.shape[1])r2 = np.random.rand(particles.shape[0], particles.shape[1])cognitive_velocity = c1 * r1 * (particles - particles[:, np.newaxis, :])social_velocity = c2 * r2 * (global_best - particles[:, np.newaxis, :])particle_velocity = w * particle_velocity + cognitive_velocity + social_velocity particles += particle_velocityreturn particles, particle_velocity# MOPSO算法def mopso(n_particles, n_dimensions, n_iterations, w, c1, c2):particles = initialize_particles(n_particles, n_dimensions)particle_velocity = np.zeros_like(particles)# 存储非支配解(Pareto前沿)non_dominated_solutions = []for iteration in range(n_iterations):objectives_values = np.array([objectives(particle) for particle in particles])# 更新非支配解for objectives in objectives_values:dominated = Falsefor solution in non_dominated_solutions:if all(solution <= objectives) and any(solution < objectives):dominated = Truebreakif not dominated:non_dominated_solutions.append(objectives)# 选择全局最优解global_best = min(non_dominated_solutions, key=lambda x: x[0] if x[1] ==min(non_dominated_solutions, key=lambda x: x[1])[1] else float('inf'))# 更新粒子速度和位置particles, particle_velocity = update_particles(particles, particle_velocity, global_best, w, c1, c2)# 可以在这里添加其他操作,例如输出当前迭代的结果print(f"Iteration {iteration+1}/{n_iterations}, Global Best: {global_best}")return non_dominated_solutions# 运行MOPSO算法n_particles = 100n_dimensions = 2n_iterations = 100w = 0.5c1 = 2.0c2 = 2.0pareto_front = mopso(n_particles, n_dimensions, n_iterations, w, c1, c2)# 输出Pareto前沿print("Pareto Front:")for solution in pareto_front:print(solution)这个示例中,我们定义了一个二维的目标函数,并使用MOPSO来找到Pareto最优解。
-种基于Pareto解集的无约束条件的多目标粒子群算法
-种基于Pareto解集的无约束条件的多目标粒子群算法
宋冠英;李海楠;邹玉静
【期刊名称】《机械工程师》
【年(卷),期】2008(000)005
【摘要】鉴于多目标优化问题的广泛存在性以及目前关于它的研究还较少,且没有一种很好的、通用的多目标PSO算法,本文提出了一种基于Pareto解集的多目标粒子群算法.通过采用一个"记忆体"来存储当前得到的Pareto最优解,对每次迭代得到的Pareto解集里的解两两进行比较以选取一个较优的解作为更新方程中当前最优解,这样可以更好的引导粒子群进行下一步的寻优操作,最终得到一个完整的Pareto最优解集.几个测试函数的仿真实验结果也表明了该算法取得了很好的效果.【总页数】3页(P141-143)
【作者】宋冠英;李海楠;邹玉静
【作者单位】青岛科技大学机电学院,山东,青岛,266061;北京燕山石化有限公司,北京,102500;青岛科技大学机电学院,山东,青岛,266061
【正文语种】中文
【中图分类】TP391.7
【相关文献】
1.一种基于杂草克隆的多目标粒子群算法 [J], 鲁鹏;章卫国;李广文;刘小雄;李想
2.一种基于模糊学习子群的多目标粒子群算法 [J], 江勋林;郭坚毅;唐建;凌海风
3.一种基于显著性和部件模型的无约束条件人脸检测方法 [J], 孔英会;高超;车辚辚
4.一种基于自适应模糊支配的高维多目标粒子群算法 [J], 余伟伟;谢承旺;闭应洲;夏学文;李雄;任柯燕;赵怀瑞;王少锋
5.一种基于健康度的多目标粒子群算法 [J], 胡玉蝶; 张涛; 黄瑾; 郭阳
因版权原因,仅展示原文概要,查看原文内容请购买。
基于粒子群算法求解多目标优化问题

基于粒子群算法求解多目标优化问题一、本文概述随着科技的快速发展和问题的日益复杂化,多目标优化问题在多个领域,如工程设计、经济管理、环境保护等,都显得愈发重要。
传统的优化方法在处理这类问题时,往往难以兼顾多个目标之间的冲突和矛盾,难以求得全局最优解。
因此,寻找一种能够高效处理多目标优化问题的方法,已成为当前研究的热点和难点。
粒子群算法(Particle Swarm Optimization, PSO)作为一种群体智能优化算法,具有收敛速度快、全局搜索能力强等优点,已经在多个领域得到了广泛应用。
近年来,粒子群算法在多目标优化问题上的应用也取得了显著的成果。
本文旨在探讨基于粒子群算法求解多目标优化问题的原理、方法及其应用,为相关领域的研究提供参考和借鉴。
本文首先介绍多目标优化问题的基本概念和特性,分析传统优化方法在处理这类问题时的局限性。
然后,详细阐述粒子群算法的基本原理和流程,以及如何将粒子群算法应用于多目标优化问题。
接着,通过实例分析和实验验证,展示基于粒子群算法的多目标优化方法在实际问题中的应用效果,并分析其优缺点。
对基于粒子群算法的多目标优化方法的发展趋势和前景进行展望,为未来的研究提供方向和建议。
二、多目标优化问题概述多目标优化问题(Multi-Objective Optimization Problem, MOP)是一类广泛存在于工程实践、科学研究以及社会经济等各个领域中的复杂问题。
与单目标优化问题只寻求一个最优解不同,多目标优化问题涉及多个相互冲突的目标,这些目标通常难以同时达到最优。
因此,多目标优化问题的解不再是单一的最优解,而是一组在各个目标之间达到某种平衡的最优解的集合,称为Pareto最优解集。
多目标优化问题的数学模型通常可以描述为:在给定的决策空间内,寻找一组决策变量,使得多个目标函数同时达到最优。
这些目标函数可能是相互矛盾的,例如,在产品设计中,可能同时追求成本最低、性能最优和可靠性最高等多个目标,而这些目标往往难以同时达到最优。
多目标粒子群算法 知乎
多目标粒子群算法知乎
MOPSO算法的基本思想是通过多个粒子在解空间中最优解,并通过不断的迭代来逼近Pareto最优解集。
Pareto最优解集指的是一组解,其中任何一解的目标函数值都无法被其他解所改善,即不存在一个解同时优于另一个解的所有目标函数值。
MOPSO算法的流程如下:
1.初始化粒子群的位置和速度;
2.计算每个粒子的适应度值(目标函数值);
3. 更新全局最优解(Pareto最优解集);
4.根据适应度值和全局最优解的位置,更新粒子的速度和位置;
5.重复步骤2-4,直到满足停止条件。
MOPSO算法与传统的粒子群算法相比,主要的改进在于多个目标函数值的处理。
传统的粒子群算法只考虑单一的目标函数值,而MOPSO算法可以同时考虑多个目标函数值,通过Pareto最优解集来反映多个目标之间的权衡关系。
通过不断迭代,MOPSO算法可以逼近Pareto最优解集,提供给决策者一组最优的选择方案。
然而,MOPSO算法也存在一些问题。
首先,MOPSO算法可能会陷入局部最优解,无法找到全局最优解。
其次,MOPSO算法需要选择合适的参数值和算法模型,否则可能无法得到有效的结果。
另外,MOPSO算法的计算复杂度较高,对于大规模问题,计算时间和空间开销也较大。
综上所述,MOPSO算法是一种用于解决多目标优化问题的有效算法。
通过利用粒子群和多目标优化的思想,MOPSO算法可以在较短时间内获得
多个最优解,帮助决策者做出合理的选择。
然而,MOPSO算法在实际应用中仍然需要面对一些挑战,需要进一步改进和优化。
基于Pareto档案粒子群算法的微电网多目标优化方法[发明专利]
![基于Pareto档案粒子群算法的微电网多目标优化方法[发明专利]](https://img.taocdn.com/s3/m/0e35103d360cba1aa911da28.png)
专利名称:基于Pareto档案粒子群算法的微电网多目标优化方法
专利类型:发明专利
发明人:张倩,丁津津,王群京,黄少雄,郑浩,梁肖,汪伟,王松
申请号:CN201710773989.3
申请日:20170831
公开号:CN107609693A
公开日:
20180119
专利内容由知识产权出版社提供
摘要:本发明针对微电网多目标优化问题转化为单目标优化问题,提供一种基于Pareto档案粒子群算法的微电网多目标优化方法。
该方法,包括建立多个优化目标函数,确定微电网的约束条件,将多个优化目标函数表征的多目标优化问题转换为成单目标优化问题,采用基于Pareto档案粒子群算法对微电网多目标优化进行求解,输出一组非劣解集,根据预设的满意程度评价标准在非劣解集中确定最优解,并对微电网运行进行优化。
本发明采用Pareto档案多目标粒子群优化算法对微电网内各个分布式电源的输出功率包括储能装置的充/放电进行优化求解,将外部档案维护和全局最好位置选取结合在一起,通过比较分析优化结果,验证了算法的有效性和可行性。
申请人:安徽大学,国网安徽省电力公司电力科学研究院,国网安徽省电力公司
地址:230601 安徽省合肥市经济技术开发区九龙路111号
国籍:CN
代理机构:杭州浙科专利事务所(普通合伙)
代理人:吴秉中
更多信息请下载全文后查看。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
粒子群算法程序ticD=10;%粒子群中粒子的个数%w=0.729;%w为惯性因子wmin=1.2;wmax=1.4;c1=1.49445;%正常数,成为加速因子c2=1.49445;%正常数,成为加速因子Loop_max=50;%最大迭代次数%初始化粒子群for i=1:DX(i)=rand(1)*(-5-7)+7;V(i)=1;f1(i)=X(i)^2;f2(i)=(X(i)-2)^2;endLoop=1;%迭代计数器while Loop<=Loop_max%循环终止条件%对粒子群中的每个粒子进行评价for i=1:Dk1=find(1==Xv(i,:));%找出第一辆车配送的城市编号nb1=size(k1,2);%计算第一辆车配送城市的个数if nb1>0%判断第一辆车配送城市个数是否大于0,如果大于0则a1=[Xr(i,k1(:))];%找出第一辆车配送城市顺序号b1=sort(a1);%对找出第一辆车的顺序号进行排序G1(i)=0;%初始化第一辆车的配送量k51=[];am=[];for j1=1:nb1am=find(b1(j1)==Xr(i,:));k51(j1)=intersect(k1,am);%计算第一辆车配送城市的顺序号G1(i)=G1(i)+g(k51(j1)+1);%计算第一辆车的配送量endk61=[];k61=[0,k51,0];%定义第一辆车的配送路径L1(i)=0;%初始化第一辆车的配送路径长度for k11=1:nb1+1L1(i)=L1(i)+Distance(k61(k11)+1,k61(k11+1)+1);%计算第一辆车的配送路径长度endelse%如果第一辆车配送的城市个数不大于0则G1(i)=0;%第一辆车的配送量设为0L1(i)=0;%第一辆车的配送路径长度设为0endk2=find(2==Xv(i,:));%找出第二辆车配送的城市编号nb2=size(k2,2);%计算第二辆车配送城市的个数if nb2>0%判断第二辆车配送城市个数是否大于0,如果大于0则a2=[Xr(i,k2(:))];%找出第二辆车配送城市的顺序号b2=sort(a2);%对找出的第二辆车的顺序号进行排序G2(i)=0;%初始化第二辆车的配送量k52=[];bm=[];for j2=1:nb2bm=find(b2(j2)==Xr(i,:));k52(j2)=intersect(k2,bm);%计算第二辆车配送城市的顺序号G2(i)=G2(i)+g(k52(j2)+1);%计算第二辆车的配送量endk62=[];k62=[0,k52,0];%定义第二辆车的配送路径L2(i)=0;%初始化第二辆车的配送路径长度for k22=1:nb2+1L2(i)=L2(i)+Distance(k62(k22)+1,k62(k22+1)+1);%计算第二辆车的路径长度endelse%如果第二辆车配送的城市个数不大于0则G2(i)=0;%第二辆车的配送量设为0L2(i)=0;%第二辆车的配送路径长度设为0endk3=find(3==Xv(i,:));%找出第三辆车配送的城市编号nb3=size(k3,2);%计算第三辆车配送城市的个数if nb3>0%判断第三辆车配送城市个数是否大于0,如果大于0则a3=[Xr(i,k3(:))];%找出第三辆车配送城市的顺序号b3=sort(a3);%对找出的第三辆车的顺序号进行排序G3(i)=0;%初始化第三辆车的配送量k53=[];cm=[];for j3=1:nb3cm=find(b3(j3)==Xr(i,:));k53(j3)=intersect(k3,cm);%计算第三辆车配送城市的顺序号G3(i)=G3(i)+g(k53(j3)+1);%计算第三辆车的配送量endk63=[];k63=[0,k53,0];%定义第三辆车的配送路径L3(i)=0;%初始化第三辆车的配送路径长度for k33=1:nb3+1L3(i)=L3(i)+Distance(k63(k33)+1,k63(k33+1)+1);%计算第三辆车的路径长度endelse%如果第三辆车配送的城市个数不大于0则G3(i)=0;%第三辆车的配送量设为0L3(i)=0;%第三辆车的配送路径长度设为0endL(i)=0;%初始化每个粒子对应的配送方案总路径长度L(i)=L1(i)+L2(i)+L3(i);%计算每个粒子对应的配送方案总路径长度if L(i)<Lg&&G1(i)<Q&&G2(i)<Q&&G3(i)<Q%如果第i个粒子的总路径长度优于历史最优粒子并且满足车辆容量要求Xvg(:)=Xv(i,:);%将粒子i设为历史最优粒子Xrg(:)=Xr(i,:);%将粒子i设为历史最优粒子Lg=L(i);%将粒子i的总路径长度设为最优粒子对应的配送方案的总路径长度elseXvg(:)=Xvg(:);%最优粒子保持不变Xrg(:)=Xrg(:);%最优粒子保持不变Lg=Lg;%最优粒子所对应的配送方案的总路径长度也不变endLimin(i)=100000;%初始化每个粒子代表的配送方案的历史最优总路径长度if L(i)<Limin(i)%如果本次循环得到的总路径长度优于粒子i历史最优总路径长度Limin(i)=L(i);%更新本次循环得到的总路径长度为粒子i的历史最优路径长度Xvl(i,:)=Xv(i,:);%更新本次得到的粒子i为i粒子的历史最优位置Xrl(i,:)=Xr(i,:); %更新本次得到的粒子i为i粒子的历史最优位置else%否则,保持粒子i的历史最优位置及历史最优路径长度不变Limin(i)=LL(i);Xvl(i,:)=Xv1(i,:);Xrl(i,:)=Xr1(i,:);endend%记录本次循环得到的所有粒子的位置for i=1:Dfor j=1:NXv1(i,j)=Xvl(i,j);%记录本次循环得到的所有粒子的位置Xr1(i,j)=Xrl(i,j);%记录本次循环得到的所有离子的位置endendLL(i)=0;%初始化每个粒子的历史最优路径总长度for i=1:DLL(i)=Limin(i);%对每个粒子的历史最优路径总长度进行赋值end%对粒子群中每个粒子进行迭代w=wmin+(wmax-wmin)*exp((-Loop)/(Loop_max-Loop));for i=1:Dfor j=1:NVv(i,j)=w*Vv(i,j)+c1*rand(1)*(Xvl(i,j)-Xv(i,j))+c2*rand(1)*(Xvg(1,j)-Xv(i,j));%计算位置变化率Vr(i,j)=w*Vr(i,j)+c1*rand(1)*(Xrl(i,j)-Xr(i,j))+c2*rand(1)*(Xrg(1,j)-Xr(i,j));%计算位置变化率%Vv(i,j)和Vr(i,j)进行上下限的限制if Vv(i,j)>K-1Vv(i,j)=K-1;elseif Vv(i,j)<1-KVv(i,j)=1-K;elseVv(i,j)=Vv(i,j);endendendfor i=1:Dfor j=1:NXv(i,j)=ceil(Xv(i,j)+Vv(i,j));%更新位置坐标%对Xv(i,j)进行上下限的限制if Xv(i,j)>KXv(i,j)=K;elseif Xv(i,j)<1Xv(i,j)=1;elseXv(i,j)=Xv(i,j);endXr(i,j)=Xr(i,j)+Vr(i,j);%更新位置坐标endendLoop=Loop+1;endXvg%输出粒子群中的最优粒子Xrg%输出粒子群中的最优粒子Lg%输出最优粒子所代表方案的总路径长度Loop%输出迭代的次数%计算最优粒子所代表的配送方案k1=find(1==Xvg(:));%找出第一辆车配送的城市编号k1=k1';nb1=size(k1,2);%计算第一辆车配送城市的个数if nb1>0%判断第一辆车配送城市个数是否大于0,如果大于0则a1=[Xrg(k1(:))];%找出第一辆车配送城市顺序号b1=sort(a1);%对找出第一辆车的顺序号进行排序G1=0;%初始化第一辆车的配送量k51=[];am=[];for j1=1:nb1am=find(b1(j1)==Xrg(:));k51(j1)=intersect(k1,am);%计算第一辆车配送城市的顺序号G1=G1+g(k51(j1)+1);%计算第一辆车的配送量endk61=[];k61=[0,k51,0];%定义第一辆车的配送路径L1=0;%初始化第一辆车的配送路径长度for k11=1:nb1+1L1=L1+Distance(k61(k11)+1,k61(k11+1)+1);%计算第一辆车的配送路径长度endelse%如果第一辆车配送的城市个数不大于0则G1=0;%第一辆车的配送量设为0L1=0;%第一辆车的配送路径长度设为0endk2=find(2==Xvg(:));%找出第二辆车配送的城市编号k2=k2';nb2=size(k2,2);%计算第二辆车配送城市的个数if nb2>0%判断第二辆车配送城市个数是否大于0,如果大于0则a2=[Xrg(k2(:))];%找出第二辆车配送城市的顺序号b2=sort(a2);%对找出的第二辆车的顺序号进行排序G2=0;%初始化第二辆车的配送量k52=[];bm=[];for j2=1:nb2bm=find(b2(j2)==Xrg(:));k52(j2)=intersect(k2,bm);%计算第二辆车配送城市的顺序号G2=G2+g(k52(j2)+1);%计算第二辆车的配送量endk62=[];k62=[0,k52,0];%定义第二辆车的配送路径L2=0;%初始化第二辆车的配送路径长度for k22=1:nb2+1L2=L2+Distance(k62(k22)+1,k62(k22+1)+1);%计算第二辆车的路径长度endelse%如果第二辆车配送的城市个数不大于0则G2=0;%第二辆车的配送量设为0L2=0;%第二辆车的配送路径长度设为0endk3=find(3==Xvg(:));%找出第三辆车配送的城市编号k3=k3';nb3=size(k3,2);%计算第三辆车配送城市的个数if nb3>0%判断第三辆车配送城市个数是否大于0,如果大于0则a3=[Xrg(k3(:))];%找出第三辆车配送城市的顺序号b3=sort(a3);%对找出的第三辆车的顺序号进行排序G3=0;%初始化第三辆车的配送量k53=[];cm=[];for j3=1:nb3cm=find(b3(j3)==Xrg(:));k53(j3)=intersect(k3,cm);%计算第三辆车配送城市的顺序号G3=G3+g(k53(j3)+1);%计算第三辆车的配送量endk63=[];k63=[0,k53,0];%定义第三辆车的配送路径L3=0;%初始化第三辆车的配送路径长度for k33=1:nb3+1L3=L3+Distance(k63(k33)+1,k63(k33+1)+1);%计算第三辆车的路径长度endelse%如果第三辆车配送的城市个数不大于0则G3=0;%第三辆车的配送量设为0L3=0;%第三辆车的配送路径长度设为0endk61k62k63x=City(:,1);y=City(:,2);%对各个城市进行顺序标号max_text={'0','1','2','3','4','5','6','7',};text(x+1,y+1,max_text)%画出最优粒子所代表的配送方案路径for i=1:nb1+2short1(i)=k61(i)+1;endfor i=1:nb2+2short2(i)=k62(i)+1;endfor i=1:nb3+2short3(i)=k63(i)+1;endline(x(short1),y(short1),'Marker','o')line(x(short2),y(short2),'Marker','o')line(x(short3),y(short3),'Marker','o')toc%计算程序的运行时间Time=num2str(toc)clear allticK=3;%车辆数D=200;%粒子群中粒子的个数Q=1;%每辆车的容量%w=0.729;%w为惯性因子wmin=1.2;wmax=1.4;c1=1.49445;%正常数,成为加速因子c2=1.49445;%正常数,成为加速因子Loop_max=50;%最大迭代次数%初始化城市坐标City=[18,54;22,60;58,69;71,71;83,46;91,38;24,42;18,40];n=size(City,1);%城市个数,包含中心仓库N=n-1;%发货点任务数for i=1:nfor j=1:nDistance(i,j)=sqrt((City(i,1)-City(j,1))^2+(City(i,2)-City(j,2))^2);%各城市节点之间的距离矩阵endendg=[0,0.89,0.14,0.28,0.33,0.21,0.41,0.57];%各发货点的货运量%初始化粒子群for i=1:Dfor j=1:NXv(i,j)=randi(K,1);%初始化粒子群中粒子的位置Vv(i,j)=randi(2*K-1,1)-K;%初始化粒子群中粒子的位置变化率Vr(i,j)=randi(2*N-1,1)-N;%初始化粒子群中离子的位置变化率Xvl(i,j)=Xv(i,j);%初始化粒子群中每个粒子的最优位置endendfor i=1:Da=randperm(N);for j=1:NXr(i,j)=a(j);%初始化粒子群中粒子的位置Xrl(i,j)=Xr(i,j);%初始化粒子群中每个粒子的最优位置endendLg=100000;%初始化最优粒子对应的配送方案的总路径长度Xvg=ones(1,N);%粒子群中最优的粒子Xrg=ones(1,N);%粒子群中最优的粒子Loop=1;%迭代计数器while Loop<=Loop_max%循环终止条件%对粒子群中的每个粒子进行评价for i=1:Dk1=find(1==Xv(i,:));%找出第一辆车配送的城市编号nb1=size(k1,2);%计算第一辆车配送城市的个数if nb1>0%判断第一辆车配送城市个数是否大于0,如果大于0则a1=[Xr(i,k1(:))];%找出第一辆车配送城市顺序号b1=sort(a1);%对找出第一辆车的顺序号进行排序G1(i)=0;%初始化第一辆车的配送量k51=[];am=[];for j1=1:nb1am=find(b1(j1)==Xr(i,:));k51(j1)=intersect(k1,am);%计算第一辆车配送城市的顺序号G1(i)=G1(i)+g(k51(j1)+1);%计算第一辆车的配送量endk61=[];k61=[0,k51,0];%定义第一辆车的配送路径L1(i)=0;%初始化第一辆车的配送路径长度for k11=1:nb1+1L1(i)=L1(i)+Distance(k61(k11)+1,k61(k11+1)+1);%计算第一辆车的配送路径长度endelse%如果第一辆车配送的城市个数不大于0则G1(i)=0;%第一辆车的配送量设为0L1(i)=0;%第一辆车的配送路径长度设为0endk2=find(2==Xv(i,:));%找出第二辆车配送的城市编号nb2=size(k2,2);%计算第二辆车配送城市的个数if nb2>0%判断第二辆车配送城市个数是否大于0,如果大于0则a2=[Xr(i,k2(:))];%找出第二辆车配送城市的顺序号b2=sort(a2);%对找出的第二辆车的顺序号进行排序G2(i)=0;%初始化第二辆车的配送量k52=[];bm=[];for j2=1:nb2bm=find(b2(j2)==Xr(i,:));k52(j2)=intersect(k2,bm);%计算第二辆车配送城市的顺序号G2(i)=G2(i)+g(k52(j2)+1);%计算第二辆车的配送量endk62=[];k62=[0,k52,0];%定义第二辆车的配送路径L2(i)=0;%初始化第二辆车的配送路径长度for k22=1:nb2+1L2(i)=L2(i)+Distance(k62(k22)+1,k62(k22+1)+1);%计算第二辆车的路径长度endelse%如果第二辆车配送的城市个数不大于0则G2(i)=0;%第二辆车的配送量设为0L2(i)=0;%第二辆车的配送路径长度设为0endk3=find(3==Xv(i,:));%找出第三辆车配送的城市编号nb3=size(k3,2);%计算第三辆车配送城市的个数if nb3>0%判断第三辆车配送城市个数是否大于0,如果大于0则a3=[Xr(i,k3(:))];%找出第三辆车配送城市的顺序号b3=sort(a3);%对找出的第三辆车的顺序号进行排序G3(i)=0;%初始化第三辆车的配送量k53=[];cm=[];for j3=1:nb3cm=find(b3(j3)==Xr(i,:));k53(j3)=intersect(k3,cm);%计算第三辆车配送城市的顺序号G3(i)=G3(i)+g(k53(j3)+1);%计算第三辆车的配送量endk63=[];k63=[0,k53,0];%定义第三辆车的配送路径L3(i)=0;%初始化第三辆车的配送路径长度for k33=1:nb3+1L3(i)=L3(i)+Distance(k63(k33)+1,k63(k33+1)+1);%计算第三辆车的路径长度endelse%如果第三辆车配送的城市个数不大于0则G3(i)=0;%第三辆车的配送量设为0L3(i)=0;%第三辆车的配送路径长度设为0endL(i)=0;%初始化每个粒子对应的配送方案总路径长度L(i)=L1(i)+L2(i)+L3(i);%计算每个粒子对应的配送方案总路径长度if L(i)<Lg&&G1(i)<Q&&G2(i)<Q&&G3(i)<Q%如果第i个粒子的总路径长度优于历史最优粒子并且满足车辆容量要求Xvg(:)=Xv(i,:);%将粒子i设为历史最优粒子Xrg(:)=Xr(i,:);%将粒子i设为历史最优粒子Lg=L(i);%将粒子i的总路径长度设为最优粒子对应的配送方案的总路径长度elseXvg(:)=Xvg(:);%最优粒子保持不变Xrg(:)=Xrg(:);%最优粒子保持不变Lg=Lg;%最优粒子所对应的配送方案的总路径长度也不变endLimin(i)=100000;%初始化每个粒子代表的配送方案的历史最优总路径长度if L(i)<Limin(i)%如果本次循环得到的总路径长度优于粒子i历史最优总路径长度Limin(i)=L(i);%更新本次循环得到的总路径长度为粒子i的历史最优路径长度Xvl(i,:)=Xv(i,:);%更新本次得到的粒子i为i粒子的历史最优位置Xrl(i,:)=Xr(i,:); %更新本次得到的粒子i为i粒子的历史最优位置else%否则,保持粒子i的历史最优位置及历史最优路径长度不变Limin(i)=LL(i);Xvl(i,:)=Xv1(i,:);Xrl(i,:)=Xr1(i,:);endend%记录本次循环得到的所有粒子的位置for i=1:Dfor j=1:NXv1(i,j)=Xvl(i,j);%记录本次循环得到的所有粒子的位置Xr1(i,j)=Xrl(i,j);%记录本次循环得到的所有离子的位置endendLL(i)=0;%初始化每个粒子的历史最优路径总长度for i=1:DLL(i)=Limin(i);%对每个粒子的历史最优路径总长度进行赋值end%对粒子群中每个粒子进行迭代w=wmin+(wmax-wmin)*exp((-Loop)/(Loop_max-Loop));for i=1:Dfor j=1:NVv(i,j)=w*Vv(i,j)+c1*rand(1)*(Xvl(i,j)-Xv(i,j))+c2*rand(1)*(Xvg(1,j)-Xv(i,j));%计算位置变化率Vr(i,j)=w*Vr(i,j)+c1*rand(1)*(Xrl(i,j)-Xr(i,j))+c2*rand(1)*(Xrg(1,j)-Xr(i,j));%计算位置变化率%Vv(i,j)和Vr(i,j)进行上下限的限制if Vv(i,j)>K-1Vv(i,j)=K-1;elseif Vv(i,j)<1-KVv(i,j)=1-K;elseVv(i,j)=Vv(i,j);endendendfor i=1:Dfor j=1:NXv(i,j)=ceil(Xv(i,j)+Vv(i,j));%更新位置坐标%对Xv(i,j)进行上下限的限制if Xv(i,j)>KXv(i,j)=K;elseif Xv(i,j)<1Xv(i,j)=1;elseXv(i,j)=Xv(i,j);endXr(i,j)=Xr(i,j)+Vr(i,j);%更新位置坐标endendLoop=Loop+1;endXvg%输出粒子群中的最优粒子Xrg%输出粒子群中的最优粒子Lg%输出最优粒子所代表方案的总路径长度Loop%输出迭代的次数%计算最优粒子所代表的配送方案k1=find(1==Xvg(:));%找出第一辆车配送的城市编号k1=k1';nb1=size(k1,2);%计算第一辆车配送城市的个数if nb1>0%判断第一辆车配送城市个数是否大于0,如果大于0则a1=[Xrg(k1(:))];%找出第一辆车配送城市顺序号b1=sort(a1);%对找出第一辆车的顺序号进行排序G1=0;%初始化第一辆车的配送量k51=[];am=[];for j1=1:nb1am=find(b1(j1)==Xrg(:));k51(j1)=intersect(k1,am);%计算第一辆车配送城市的顺序号G1=G1+g(k51(j1)+1);%计算第一辆车的配送量endk61=[];k61=[0,k51,0];%定义第一辆车的配送路径L1=0;%初始化第一辆车的配送路径长度for k11=1:nb1+1L1=L1+Distance(k61(k11)+1,k61(k11+1)+1);%计算第一辆车的配送路径长度endelse%如果第一辆车配送的城市个数不大于0则G1=0;%第一辆车的配送量设为0L1=0;%第一辆车的配送路径长度设为0endk2=find(2==Xvg(:));%找出第二辆车配送的城市编号k2=k2';nb2=size(k2,2);%计算第二辆车配送城市的个数if nb2>0%判断第二辆车配送城市个数是否大于0,如果大于0则a2=[Xrg(k2(:))];%找出第二辆车配送城市的顺序号b2=sort(a2);%对找出的第二辆车的顺序号进行排序G2=0;%初始化第二辆车的配送量k52=[];bm=[];for j2=1:nb2bm=find(b2(j2)==Xrg(:));k52(j2)=intersect(k2,bm);%计算第二辆车配送城市的顺序号G2=G2+g(k52(j2)+1);%计算第二辆车的配送量endk62=[];k62=[0,k52,0];%定义第二辆车的配送路径L2=0;%初始化第二辆车的配送路径长度for k22=1:nb2+1L2=L2+Distance(k62(k22)+1,k62(k22+1)+1);%计算第二辆车的路径长度endelse%如果第二辆车配送的城市个数不大于0则G2=0;%第二辆车的配送量设为0L2=0;%第二辆车的配送路径长度设为0endk3=find(3==Xvg(:));%找出第三辆车配送的城市编号k3=k3';nb3=size(k3,2);%计算第三辆车配送城市的个数if nb3>0%判断第三辆车配送城市个数是否大于0,如果大于0则a3=[Xrg(k3(:))];%找出第三辆车配送城市的顺序号b3=sort(a3);%对找出的第三辆车的顺序号进行排序G3=0;%初始化第三辆车的配送量k53=[];cm=[];for j3=1:nb3cm=find(b3(j3)==Xrg(:));k53(j3)=intersect(k3,cm);%计算第三辆车配送城市的顺序号G3=G3+g(k53(j3)+1);%计算第三辆车的配送量endk63=[];k63=[0,k53,0];%定义第三辆车的配送路径L3=0;%初始化第三辆车的配送路径长度for k33=1:nb3+1L3=L3+Distance(k63(k33)+1,k63(k33+1)+1);%计算第三辆车的路径长度endelse%如果第三辆车配送的城市个数不大于0则G3=0;%第三辆车的配送量设为0L3=0;%第三辆车的配送路径长度设为0endk61k62k63x=City(:,1);y=City(:,2);%对各个城市进行顺序标号max_text={'0','1','2','3','4','5','6','7',};text(x+1,y+1,max_text)%画出最优粒子所代表的配送方案路径for i=1:nb1+2short1(i)=k61(i)+1;endfor i=1:nb2+2short2(i)=k62(i)+1;endfor i=1:nb3+2short3(i)=k63(i)+1;endline(x(short1),y(short1),'Marker','o') line(x(short2),y(short2),'Marker','o') line(x(short3),y(short3),'Marker','o') toc%计算程序的运行时间Time=num2str(toc)clear all。