Harris角点检测
列举三种角点检测的方法及其原理。
列举三种角点检测的方法及其原理。
当涉及角点检测时,有几种常见的方法:
1. Harris角点检测方法:
Harris角点检测是一种基于局部区域的方法,它通过计算图像
中每个像素周围区域的灰度变化来检测角点。
该方法使用特征值来
判断像素点是否为角点,当特征值较大时,说明该点周围存在角点。
Harris角点检测方法具有较好的旋转不变性和光照不变性,因此在
图像配准和目标跟踪中得到广泛应用。
2. Shi-Tomasi角点检测方法:
Shi-Tomasi角点检测是对Harris角点检测方法的改进,它使
用了Harris检测方法中的特征值,但是对特征值的选取进行了改进,提出了一个自适应的角点检测算法。
Shi-Tomasi方法在选择角点时
使用了一个自适应的阈值,相比于Harris方法,它能够更好地选择
稳定的角点。
3. FAST角点检测方法:
FAST(Features from Accelerated Segment Test)角点检测
方法是一种基于像素灰度值的快速检测方法。
它通过比较像素点周
围的像素值来判断是否为角点,具有较快的速度和较高的检测性能。
FAST方法通过比较像素点周围的像素值和中心像素值的大小来判断
是否为角点,从而实现了快速的角点检测。
这些角点检测方法在计算机视觉和图像处理领域有着广泛的应用,它们在目标跟踪、图像配准、三维重建等方面发挥着重要作用。
每种方法都有其独特的优势和适用场景,可以根据具体的应用需求
选择合适的角点检测方法。
harris角点检测算法的原理
harris角点检测算法的原理宝子!今天咱来唠唠这个超有趣的Harris角点检测算法的原理呀。
你看啊,在图像里呢,角点可是很特别的存在。
就像是人群里那个特别出众的帅哥或者美女,一眼就能被瞅见。
角点不是那种平平无奇的点哦。
比如说在一个方形的图像里,四个角就是很典型的角点。
那这个Harris角点检测算法呢,就像是一个超级侦探,专门去把这些角点给找出来。
想象一下,这个算法是怎么看待图像的呢?它把图像看成是一个充满变化的小世界。
对于图像中的每个小区域,算法会去研究这个区域周围的像素是怎么变化的。
就好比你站在一个小广场上,看看周围的人是怎么分布的,是均匀散开呢,还是有某个方向特别密集或者稀疏。
这个算法有个很关键的东西叫自相关函数。
这函数就像是一个小魔法棒,它会去计算每个小区域在不同方向上的像素变化情况。
如果在某个点的周围,不管你朝哪个方向去看,像素的变化都很明显,那这个点就很有可能是角点啦。
比如说,你在一个十字街头,不管你是看南北方向的街道,还是东西方向的街道,周围的景色(也就是像素)变化都很大,那这个十字路口就像是图像里的角点一样。
那这个算法具体是怎么操作的呢?它会先建立一个小的窗口,就像拿着一个小放大镜在图像上到处看。
这个窗口会在图像上滑动,每到一个地方,就开始计算这个地方的自相关函数。
这个计算过程呢,其实就是在看这个小窗口里的像素和周围像素的关系。
如果这个关系在各个方向上都很独特,那就有可能是角点啦。
你知道吗,这个算法还会用到矩阵呢。
不过别被矩阵吓到,它就像是一个小账本,记录着这个小区域像素变化的各种信息。
比如说,矩阵会告诉你这个区域在水平方向和垂直方向上像素变化的快慢呀之类的。
如果这个矩阵的特征值有某种特殊的情况,那就说明这个点很可能是角点。
就好像是这个小账本上的某些数字组合起来,就指向了这个特别的角点。
而且哦,这个Harris角点检测算法还有个很贴心的地方。
它不是那种很死板的算法,它会根据不同的图像特点去调整自己的判断标准。
特征匹配-Harris角点检测
特征匹配-Harris⾓点检测⼀、harris算法简介1.⾓点概述⾓点是图像很重要的特征,对图像图形的理解和分析有很重要的作⽤。
⾓点在保留图像图形重要特征的同时,可以有效地减少信息的数据量,使其信息的含量很⾼,有效地提⾼了计算的速度,有利于图像的可靠匹配,使得实时处理成为可能。
从图像分析的⾓度来定义⾓点可以有以下两种定义:⾓点可以是两个边缘的⾓点;⾓点是邻域内具有两个主⽅向的特征点;前者往往需要对图像边缘进⾏编码,这在很⼤程度上依赖于图像的分割与边缘提取,具有相当⼤的难度和计算量,且⼀旦待检测⽬标局部发⽣变化,很可能导致操作的失败。
基于图像灰度的⽅法通过计算点的曲率及梯度来检测⾓点,避免了第⼀类⽅法存在的缺陷,此类⽅法主要有Moravec算⼦、Forstner算⼦、Harris算⼦、SUSAN算⼦等。
本⽂主要介绍的Harris⾓点检测的算法原理。
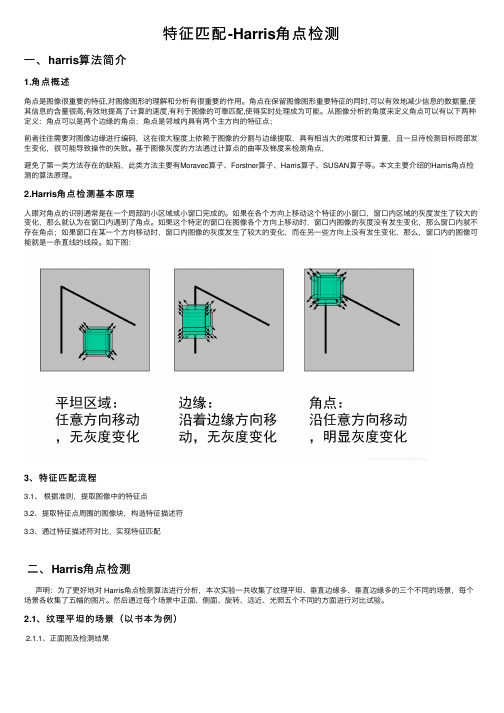
2.Harris⾓点检测基本原理⼈眼对⾓点的识别通常是在⼀个局部的⼩区域或⼩窗⼝完成的。
如果在各个⽅向上移动这个特征的⼩窗⼝,窗⼝内区域的灰度发⽣了较⼤的变化,那么就认为在窗⼝内遇到了⾓点。
如果这个特定的窗⼝在图像各个⽅向上移动时,窗⼝内图像的灰度没有发⽣变化,那么窗⼝内就不存在⾓点;如果窗⼝在某⼀个⽅向移动时,窗⼝内图像的灰度发⽣了较⼤的变化,⽽在另⼀些⽅向上没有发⽣变化,那么,窗⼝内的图像可能就是⼀条直线的线段。
如下图:3、特征匹配流程3.1、根据准则,提取图像中的特征点3.2、提取特征点周围的图像块,构造特征描述符3.3、通过特征描述符对⽐,实现特征匹配⼆、Harris⾓点检测声明:为了更好地对 Harris⾓点检测算法进⾏分析,本次实验⼀共收集了纹理平坦、垂直边缘多、垂直边缘多的三个不同的场景,每个场景各收集了五幅的图⽚。
然后通过每个场景中正⾯、侧⾯、旋转、远近、光照五个不同的⽅⾯进⾏对⽐试验。
2.1、纹理平坦的场景(以书本为例)2.1.1、正⾯图及检测结果2.1.2、侧⾯图及检测结果2.1.3、旋转图及检测结果2.1.4 、远距离图及检测结果2.1.5 、光照图及检测结果实验结果分析与总结:Harris⾓点检测算⼦具有旋转不变性。
harris角点检测阈值
harris角点检测阈值
Harris角点检测是一种常用的图像处理算法,用于检测图像中的角点。
在Harris角点检测中,阈值的选择对于最终的检测结果至关重要。
阈值的设定可以影响检测到的角点数量和质量,因此需要根据具体的应用场景来进行选择。
首先,阈值的选择应该考虑到图像的特性,包括图像的噪声水平、对比度以及所需的角点数量。
较高的阈值可以过滤掉一些较弱的角点,从而得到更可靠的结果,但可能会丢失一些重要的角点信息;而较低的阈值可能会导致检测到大量的噪声点或者非角点,从而影响最终的结果。
其次,阈值的选择也应该结合算法的参数和具体的应用需求。
一般来说,可以通过实验和调参的方式来确定一个合适的阈值,或者根据具体的应用场景来进行调整。
此外,也可以考虑使用自适应阈值的方法,根据局部像素的特性来动态调整阈值,从而更好地适应不同的图像情况。
另外,还可以考虑使用多尺度的Harris角点检测方法,通过在不同尺度下进行检测和阈值的选择,从而得到更全面和准确的角点
检测结果。
总之,Harris角点检测的阈值选择需要综合考虑图像特性、算法参数和应用需求,通过实验和调参来确定合适的阈值,或者采用自适应阈值的方法来动态调整阈值,以获得更好的检测结果。
Harris角点检测原理详解

Harris⾓点检测原理详解关于⾓点的应⽤在图像处理上⽐较⼴泛,如图像匹配(FPM特征点匹配)、相机标定等。
⽹上也有很多博客对Harris⾓点检测原理进⾏描述,但基本上只是描述了算法流程,⽽其中相关细节并未作出解释,这⾥我想对有些地⽅做出补充说明,正所谓知其然知其所以然,如有不对,还望指正。
关于⾓点的应⽤在图像处理上⽐较⼴泛,如图像匹配(FPM特征点匹配)、相机标定等。
⽹上也有很多博客对Harris⾓点检测原理进⾏描述,但基本上只是描述了算法流程,⽽其中相关细节并未作出解释,这⾥我想对有些地⽅做出补充说明,正所谓知其然知其所以然,如有不对,还望指正。
1. 何为⾓点?下⾯有两幅不同视⾓的图像,通过找出对应的⾓点进⾏匹配。
再看下图所⽰,放⼤图像的两处⾓点区域:我们可以直观的概括下⾓点所具有的特征:>轮廓之间的交点;>对于同⼀场景,即使视⾓发⽣变化,通常具备稳定性质的特征;>该点附近区域的像素点⽆论在梯度⽅向上还是其梯度幅值上有着较⼤变化;2. ⾓点检测算法基本思想是什么?算法基本思想是使⽤⼀个固定窗⼝在图像上进⾏任意⽅向上的滑动,⽐较滑动前与滑动后两种情况,窗⼝中的像素灰度变化程度,如果存在任意⽅向上的滑动,都有着较⼤灰度变化,那么我们可以认为该窗⼝中存在⾓点。
3.如何⽤数学⽅法去刻画⾓点特征?当窗⼝发⽣[u,v]移动时,那么滑动前与滑动后对应的窗⼝中的像素点灰度变化描述如下:公式解释:>[u,v]是窗⼝的偏移量>(x,y)是窗⼝内所对应的像素坐标位置,窗⼝有多⼤,就有多少个位置>w(x,y)是窗⼝函数,最简单情形就是窗⼝内的所有像素所对应的w权重系数均为1。
但有时候,我们会将w(x,y)函数设定为以窗⼝中⼼为原点的⼆元正态分布。
如果窗⼝中⼼点是⾓点时,移动前与移动后,该点的灰度变化应该最为剧烈,所以该点权重系数可以设定⼤些,表⽰窗⼝移动时,该点在灰度变化贡献较⼤;⽽离窗⼝中⼼(⾓点)较远的点,这些点的灰度变化⼏近平缓,这些点的权重系数,可以设定⼩点,以⽰该点对灰度变化贡献较⼩,那么我们⾃然想到使⽤⼆元⾼斯函数来表⽰窗⼝函数,这⾥仅是个⼈理解,⼤家可以参考下。
Harris与SUSAN原理及实验结果分析

Harris 与SUSAN 角点检测算法原理与实验结果分析一.Harris 算法原理Harris 角点检测算法的基本原理是取以目标像素点为中心的一个小窗口,计算窗口沿任何方向移动后的灰度变化,并用解析形式表达。
设以像素点(x,y)为中心的小窗口在X 方向上移动u ,y 方向上移动v ,Harris 给出了灰度变化度量的解析表达式:2,,|,|,,()(x y x y x u y v x y x y I I E w I I w u v o X Y ∂∂=-=++∂∂∑∑ (1.1)其中,,x y E 为窗口内的灰度变化度量;,x y w 为窗口函数,一般定义为222()/,x y x y w eσ+=;I 为图像灰度函数,略去无穷小项有: 222222,,[()()2]2x y x y x y x y E w u I v I uvI I Au Cuv Bv =++=++∑(1.2)将,x y E 化为二次型有: ,[]x y u E u v M v ⎡⎤=⎢⎥⎣⎦(1.3)M 为实对称矩阵: 2,2x y x x y x y y I I I M w I I I ∙⎤⎡=⎥⎢∙⎢⎥⎣⎦∑ (1.4)通过对角化处理得到: 11,200x y E R R λλ-⎛⎫= ⎪⎝⎭ (1.5)其中,R 为旋转因子,对角化处理后并不改变以u,v 为坐标参数的空间曲面的形状,其特征值反应了两个主轴方向的图像表面曲率。
当两个特征值均较小时,表明目标点附近区域为“平坦区域”;特征值一大一小时,表明特征点位于“边缘”上;只有当两个特征值均比较大时,沿任何方向的移动均将导致灰度的剧烈变化。
Harris 的角点响应函数(CRF)表达式由此而得到:2(,)det()(())CRF x y M k trace M =- (1.6) 其中:det(M)表示矩阵M 的行列式,trace(M)表示矩阵的迹。
当目标像素点的CRF 值大于给定的阈值时,该像素点即为角点。
特征检测之Harris角点检测简介
特征点又叫兴趣点或者角点。
常被用于目标匹配,目标跟踪,三维重建等应用中。
点特征主要指图像中的明显点,如突出的角点、边缘端点、极值点等等。
特征点具有以下三种特性:▪旋转不变性;▪光照不变性;▪视角不变性。
用于点特征提取的算子称为兴趣点提取(检测)算子。
常用的有▪Harris角点检测;▪FAST特征检测;▪SIFT特征检测;▪SURF特征检测。
预备数学实对称矩阵如果有n阶矩阵A,其矩阵的元素都为实数,且矩阵A的转置等于其本身,则称A为实对称矩阵。
性质:▪实对称矩阵A的不同特征值对应的特征向量是正交的;▪n阶实对称矩阵A必可相似对角化,且相似对角阵上的元素即为矩阵本身特征值。
对角化:优点:满秩的对角方阵,可以直接看出特征值,特征向量等重要特征。
卷积算子—Sobel算子主要用于边缘检测,分别对水平和垂直方向上的边缘敏感。
对图像任意一点使用会产生对应的梯度矢量或者其法矢量。
对噪声具有平滑抑制作用,但是得到的边缘较粗,且可能出现伪边缘。
该算子包含两组3x3的矩阵,分别为横向及纵向,将之与图像作平面卷积,即可分别得出横向及纵向的亮度差分近似值。
如果以A代表原始图像,Gx 及Gy分别代表经横向及纵向边缘检测的图像,其公式如下:梯度计算公式梯度方向计算公式如果等于零,代表图像该处拥有纵向边缘,左边比右边要暗。
基础知识1、角点使用一个滑动窗口在下面三幅图中滑动,可以得出以下结论:▪左图表示一个平坦区域,在各方向移动,窗口内像素值均没有太大变化;▪中图表示一个边缘特征(Edges),如果沿着水平方向移动(梯度方向),像素值会发生跳变;如果沿着边缘移动(平行于边缘) ,像素值不会发生变化;▪右图表示一个角(Corners),不管你把它朝哪个方向移动,像素值都会发生很大变化。
所以,右图是一个角点。
2、角点类型下图展示了不同角点的类型,可以发现:如果使用一个滑动窗口以角点为中心在图像上滑动,存在朝多个方向上的移动会引起该区域的像素值发生很大变化的现象。
harris角点检测的原理
harris角点检测的原理
Harris角点检测是一种计算机视觉算法,用于寻找图像中的角
点(即具有明显的边缘变化的局部区域)。
其原理如下:
1. 图像灰度化:将彩色图像转换为灰度图像,以便后续处理。
2. 梯度计算:根据图像灰度值计算每个像素的梯度,通常使用Sobel算子进行图像梯度计算。
3. 计算自相关矩阵:对于每个像素,计算其周围窗口内梯度的自相关矩阵。
自相关矩阵是一个2x2的矩阵,包含了图像的二阶梯度信息。
4. 计算Harris响应函数:根据自相关矩阵计算Harris响应函数,该函数用于评估每个像素周围区域是否为角点。
Harris响应函
数定义为:
R = det(M) - k(trace(M))^2
其中,M是自相关矩阵,det(M)和trace(M)分别表示矩阵的行
列式和迹,k是一个经验参数,用于调整角点检测的灵敏度。
5. 非最大抑制:对于Harris响应函数计算得到的角点,使用非最大抑制算法排除冗余的角点。
非最大抑制通常根据角点的Harris响应值大小和邻域内角点的距离来决定是否保留一个角点。
6. 阈值处理:根据Harris响应函数的阈值,将不满足要求的角点剔除。
通常会通过设定一个合适的阈值,以过滤掉噪声和不
显著的角点。
通过以上步骤,Harris角点检测算法可以在图像中准确地检测到具有明显边缘变化的角点,并过滤掉不相关的点和噪声。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2014.1.14
特征提取
本质区别:特 征提取的空间 范围不同
颜色 直方图 全局特征 方差...
图像特征 角点 局部特征 边缘点
ห้องสมุดไป่ตู้
局部特征最初的研究是从角点开始的
拐点...
角点
• 局部窗口沿各方向移动,均产生明显变化的点 • 图像局部曲率突变的点
角点检测
好的角点检测算法需具备以下几点: • 检测出图像中“真实的角点”; • 准确的定位功能; • 很高的重复检测率(稳定性好); • 具有对噪声的鲁棒性; • 具有较高的计算效率;
x (image coordinate)
x (image coordinate)
Harris角点的性质
3.对于图像几何尺度变化不具有不变性:
边缘点
角点
总结
1.沿方向 [u,v]的平均灰度变化可以表达成以下形式:
E u, v u u v M v
2.使用M的特征值表达图像点局部灰度变化的情况,定义角点响应函数:
2
"Edge" R<0
R 只与M的特征值有关 1.角点:R 为大数值正数 2.边缘:R为大数值负数 3.平坦区:R为小数值
"Corner" R>0
“Edge” 1 >> 2
"Flat" |R| small
"Edge" R<0
1
Harris角点检测
对角点响应函数R进行阈值处理
R > threshold
2
通过M的两个特征值的 大小对图像点进行分类:
"Edge" 2 >> 1 "Corner" 1 和 2 都较大且 数值相当 1 ~ 2 ; “Edge” 图像窗口在所有方向上 1 >> 2 移动都产生明显灰度变化
如果1 和 2 都很小, 图像窗口在所有方向上 移动都无明显灰度变化
又
2
I
x
u I yv
2
u
2 Ix v I x I y
I x I y u 2 Iy v
Harris角点检测
于是对于局部微小的移动量 [u,v],可以近似得到下面的表达:
E u, v u u v M v
其中M是 22 矩阵,可由图像的导数求得:
2 Ix M w x, y x, y I x I y
IxIy 2 Iy
1 0 M 0 2
对于矩阵M,将其对角化后,特征值λ1、λ2分别代表了x和y方向的 灰度变化率。
Harris角点检测
R det M k trM
2
3.一个好的角点沿着任意方向移动都将导致明显的图像灰度变化,即: R具有大的正数值。
参考
• /jwh_bupt/article/details/7628665 • /ztfei/archive/2012/05/07/2487123.html
当大于时,则定义为角点,最后对所有提取出的角点进行非极大值抑 制,提取R的局部极大值。
Harris角点的性质
1.旋转不变性:
角点响应函数 R对于图像的旋转具有不变性
Harris角点的性质
2.对于图像灰度的变化具有部分的不变性
只使用了图像导数 => 对于灰度平移变化不变:
II+b
对于图像灰度的尺度变化: IaI R 阈值 R
x, y
2
高斯窗口
(x,y)移动(u,v)后的灰度值 (x,y)处的灰度值
Harris角点检测
因为
I x u, y v I x, y I xu I y v O u v
2
图像在x方向的曲率 图像在y方向的曲率
2
误差项
所以
x, y
E u , v w x, y I x u I y v O u 2 , v 2
Harris角点检测
平坦区域: 任意方向移动 无灰度变化
边缘: 沿着边缘方向移动 无灰度变化
角点: 沿任意方向移动 灰度明显变化
Harris角点检测
将图像窗口平移[u,v]产生灰度变化E(u,v)
E(u, v) wx, y I x u, y v I x, y
"Flat"
1 0 2 0
"Edge" 1 >> 2
1
Harris角点检测
定义角点响应函数R
R det M k trM
2
det M 12
trM 1 2
(k – empirical constant, k = 0.04-0.06)
Harris角点检测