车载通信网络结构
v2v技术原理
v2v技术原理
V2V(车辆对车辆)技术是指通过车辆间的无线通信实现实时交流和信息共享的技术。
其原理可以概括如下:
1. 网络体系结构:V2V技术基于车辆自组网(VANET),车辆之间通过无线通信建立一个临时性的网络。
2. 通信技术:V2V技术采用无线通信技术,一般使用车载通信设备(on-board unit, OBU)进行通信。
常见的通信技术包括Wi-Fi、蜂窝网络(如4G、5G)和DSRC(Dedicated Short Range Communications)。
其中,DSRC是一种特定的无线通信技术,专门用于车辆间通信,在实时性和可靠性方面更有优势。
3. 数据传输:V2V技术可以传输各种类型的数据,例如车辆状态、位置信息、速度、加速度、制动状态等。
这些数据可以通过无线通信传输到其他车辆,以实现实时信息的共享。
4. 通信协议:为了确保数据的高效传输和解析,V2V技术采用特定的通信协议。
常见的协议包括IEEE 802.11p和LTE-
V2X(Long Term Evolution Vehicle-to-Everything)。
这些协议定义了数据包格式、通信序列和安全机制等。
5. 安全机制:由于V2V技术涉及车辆间的通信,安全性是一个重要的考虑因素。
V2V技术采用加密和认证机制,以确保数据的保密性和完整性,以防止恶意攻击和信息篡改。
通过V2V技术,车辆可以相互感知和理解彼此的动态信息,从而实现实时协作和交互。
这种技术在交通流量优化、交通安全和自动驾驶等领域有着广泛的应用前景。
2.3 常用车载网络系统(VAN、LAN)

常用车载网络系统
1.LAN的传输介质
最常见的LAN的类型是采用同轴电缆的总线型/树形 网络,当然也可以选择采用双绞线、同轴电缆甚至 光纤的环形网。LAN的传输速率为1Mbit/s~ 20Mbit/s,足以满足大部分的应用要求,并且允许 相当多的设备共享网络。
2.LAN的拓扑结构
LAN常用的拓扑结构有3种:星形、环形、总线型/ 树形
24
常用车载网络系统
小结
1. VAN的物理层由 组成(通信介质是 铜线),其两条线分别叫做DATAA和DATAB。
25
常用车载网络系统
小结
1. VAN的物理层由互补数据对组成(通信介质是 铜线),其两条线分别叫做DATAA和DATAB。
26
常用车载网络系统
小结
4. LAN(In-Vehicle Local Area Network, )。
3
3 4
5 6
常用车载网络系统
2.3 VAN系统
VAN(Vehicle Area Network,车辆局域网),是由 标致、雪铁龙、雷诺公司联合开发研制的,它主要应用 于车身电器设备的控制。VAN数据总线系统协议是一种 只需要中等通信速率的通信协议,适用于车身功能和车 辆舒适性功能的管理
VAN数据总线系统协议的OSI模型分层
常用车载网络系统
31
VAN数据总线系统拓扑
6
常用车载网络系统 4.节点结构 一个VAN数据总线系统电控单元拥有一个标准 接口(VAN标准),以便于与其他VAN数据总 线系统电控单元之间进行信息数据处理。
VAN数据总线系统节点结构
7
常用车载网络系统 5.帧结构 一个VAN数据总线系统的帧由9个域组成。
VAN数据总线系统的帧结构
车联网体系结构及其关键技术
车联网体系结构及其关键技术
汽车联网体系结构及其关键技术:
一、汽车联网体系的基本架构
1. 传感层:包含车载传感器、物联网节点等,可实时监控车辆状态,
并传输信息实时更新。
2. 运输层:采用移动通信网络,包括GSM、CDMA等,为汽车联网提
供固定可靠的交通保障。
3. 网络层:网络架构综合多种网络技术标准,如MS Exchange、HTTP、UDP 等协议,保证汽车联网安全可靠。
4. 应用层:软件设计技术,实现车辆诊断、控制、保养和维修等功能,为智能汽车的发展提供支撑。
二、汽车联网关键技术
1. 无线感知:通过建网和协调信息合作,实现高性能的路由模型,实
现无线访问网络,改善基础设施。
2. 车辆控制:通过精密定位系统以及传输和交互,实现车辆远程控制
功能,保证汽车的安全准确性。
3. 汽车数据集成:通过实时传输和处理数据,可以实现数据的集成、
管理和分析,实现数据的各项分析功能。
4. 服务发现:基于GSM/GPRS和Wifi的收发及车辆智能物联网技术,
实时监控、收集和识别车辆状态,使用精确服务路径、延迟优化等技
术,保证汽车联网系统实时可用性。
5. 安全管理:基于安全网络服务,采用静态分析、动态分析等手段,实现汽车联网系统的安全和有效管理,并保护数据安全。
四种主流的汽车总线:CAN、LIN、FlexRay和MOST总线技术详解
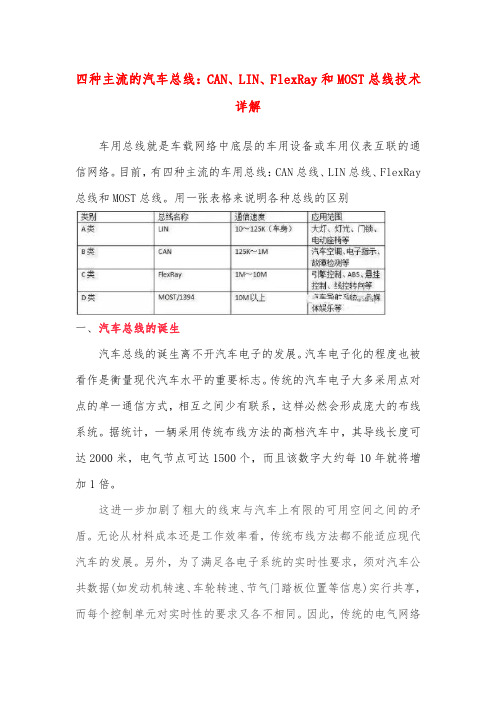
四种主流的汽车总线:CAN、LIN、FlexRay和MOST总线技术详解车用总线就是车载网络中底层的车用设备或车用仪表互联的通信网络。
目前,有四种主流的车用总线:CAN总线、LIN总线、FlexRay 总线和MOST总线。
用一张表格来说明各种总线的区别一、汽车总线的诞生汽车总线的诞生离不开汽车电子的发展。
汽车电子化的程度也被看作是衡量现代汽车水平的重要标志。
传统的汽车电子大多采用点对点的单一通信方式,相互之间少有联系,这样必然会形成庞大的布线系统。
据统计,一辆采用传统布线方法的高档汽车中,其导线长度可达2000米,电气节点可达1500个,而且该数字大约每10年就将增加1倍。
这进一步加剧了粗大的线束与汽车上有限的可用空间之间的矛盾。
无论从材料成本还是工作效率看,传统布线方法都不能适应现代汽车的发展。
另外,为了满足各电子系统的实时性要求,须对汽车公共数据(如发动机转速、车轮转速、节气门踏板位置等信息)实行共享,而每个控制单元对实时性的要求又各不相同。
因此,传统的电气网络已无法适应现代汽车电子系统的发展,于是新型汽车总线技术便应运而生。
二、CAN总线CAN总线又称作汽车总线,全称为“控制器局域网(Controller Area Network)”,是一种能有效支持分布式控制和实时控制的串行通讯网络。
它将各个单一的控制单元以某种形式(多为星形)连接起来,形成一个完整的系统。
CAN总线最早是德国Bosch公司为解决现代汽车中众多的电控模块(ECU)之间的数据交换而开发的一种串行通讯协议。
现今在汽车电子系统中已得到广泛应用,成为欧洲汽车制造业的主体行业标准,代表着汽车电子控制网络的主流发展趋势。
世界上很多著名的汽车制造厂商,如Volkswagen(大众)、Benz(奔驰)、BMW(宝马)、Porsche(保时捷)、Rolls.Royce(劳斯莱斯)等公司都已经采用CAN总线来实现汽车内部控制系统的数据通信。
第五章 车载以太网【车载网络及信息技术】

车载以太网
• 由于车载以太网的特点,在车辆上主要作为信息主干网络和车载 信息系统的通信网络,图5-1是一个以车载以太网为骨干网的车 上通信网络示例。
• 其中,车辆电子控制系统、动力传动系统以及车身控制等这些要 求实时性可靠性高、传输的数据短、数据量少的系统会仍继续使 用CAN、FlexRay等网络
第五章 车载以太网
• 车载通信技术的发展是从串行通信,到工业总线,再到 总线网络。随着车载电子控制和信息装置的增加以及信 息服务需求的不断增加,更高级的计算机网络的应用是 必然的。
• 多媒体、电子地图、INTERNET网络信息等在车上的应用 • 在车上使用以太网,并对其适当修改,既要保持以太网
的优势特点,又要满足车辆环境的要求,这就是所谓车 载以太网
• 7) 媒介访问方式为CSMA / CD(载波侦听多路访问冲突检 测),原理简单,技术易实现,网络中各工作站地位平等, 不需集中或优先级控制;
• 8) 传输速度为10 Mbps,100 Mbps或以上,目前千兆以太 网和万兆以太网已经投入使用;
• 9) EMC性能——可以根据不同的实际应用情况进行设计, 以满足OEM的EMC要求。
Ethernet Ethernet
Ethernet
6
图5-1:以车载以太网为骨干网的车上通信网络架构
7
第一节 以太网简介
➢一、定义 • 符合IEEE802.3规范的计算机网络就称为以太网。以太网最
早由Xerox(施乐)公司推出,于1980年DEC、Intel和Xerox 三家公司联合开发成为一个标准。以太网是应用最为广泛 的局域网,包括标准的以太网(10Mbit/s)、快速以太网 (100Mbit/s)和10G(10Gbit/s)以太网。它们都符合 IEEE802.3。
汽车车载网络技术基础PPT课件

混合型拓扑结构
总结词:结合星型和网状拓扑结构优点 总结词:设计难度大 总结词:成本较高
详细描述:混合型拓扑结构结合了星型和网状拓扑结构 的优点,既具有较好的扩展性,又提高了信息传输效率 。
V2X通信技术的发展
V2X通信技术使得车辆能够与周围环境进行信息交互,从而提高驾驶安全性,车载网络技 术也将朝着这个方向发展。
车载网络面临的挑战
1 2 3
数据安全问题
车载网络涉及到大量的个人信息和车辆数据,如 何保证数据的安全性和隐私性是一个重要的问题。
网络连接稳定性问题
车载网络的连接稳定性是一个关键问题,特别是 在高速行驶和偏远地区,如何保证网络的稳定连 接是一个挑战。
03
云计算和大数据技术在车载网络中的应用
通过云计算和大数据技术,可以实现车载数据的存储和分 析,为驾驶者提供更加个性化的服务。
THANKS FOR WATCHING
感谢您的观看
FlexRay总线协议
总结词
FlexRay总线协议是一种高速、高可靠性 的串行通信协议,适用于汽车中的高性 能网络和安全关键应用。
VS
详细描述
FlexRay总线协议是一种高速、高可靠性 的串行通信协议,适用于汽车中的高性能 网络和安全关键应用。它具有确定性、灵 活性和可扩展性等特点,能够满足汽车在 安全、舒适和性能方面的要求。FlexRay 总线协议采用时间触发和事件触发两种通 信方式,具有双通道冗余和故障容错能力 。
在车载网络中部署防火墙,过滤掉恶意流量和攻击行 为,防止外部攻击。
入侵检测与防御
实时监测车载网络中的异常行为,及时发现并防御恶 意攻击。
汽车车载网络技术
图5-24 MOST电控单元之间的连接 24
第三节 蓝 牙 技 术
一、 蓝牙技术简介 二、蓝牙技术的特点 三、蓝牙技术在车载免提系统中的应用
一、 蓝牙技术简介
蓝牙技术(BluetoothTM)是一种无线通信新技术,其 目的是实现最高数据传输速率为1Mbit/s、最大传输距 离为10m的无线通信。
3. MOST数据的类型
在MOST网络中,传输的信息有同步数据、异步 数据和控制数据3种类型,分别由一个信息帧的同步 数据场、异步数据场和控制数据场传送,如图所示。
图5-17 MOST数据组成
二、 MOST的结构和控制原理
1. MOST的基本结构 2. MOST总线工作状态 3. MOST控制原理 4. MOST总线的诊断功能
NRZ编码协议
8
第二节 MOST总线
一、 MOST总线的特点和类型 二、 MOST的结构和控制原理 三、 MOST在汽车上的应用
一、 MOST总线的特点和类型
1. MOST的含义 2. MOST的特点 3. MOST数据的类型 4.基本概念
1. MOST的含义
多 媒 体 定 向 系 统 传 输 (Media Oriented Systems Transport,MOST)为车辆中使用的一种多媒体应用通 信技术。MOST利用一根光纤,最多可以同时传送15 个频道的CD质量的非压缩音频数据。在一个局域网上 ,最多可连接64个节点。
图5-28 诊断接口
二、诊断条件
表5-4 诊断插接器端子功能说明
三、诊断总线的地址格式扩展
表5-5 诊断总线的诊断条件
第五节 汽车光纤技术
一、光纤的类型和特点 二、光纤多路传输的组成与应用 三、光源光学星形网络的检测
车载网络通信基础知识
车载网络通信基础知识目录一、基础概念 (2)1. 车载网络通信的定义 (3)2. 车载网络通信的重要性 (3)3. 车载网络通信的发展历程 (5)二、基本原理 (6)1. 车载网络通信的协议层次结构 (7)2. 数据传输方式 (9)2.1 串行传输 (11)2.2 并行传输 (12)3. 车载网络通信的拓扑结构 (13)3.1 星型拓扑 (14)3.2 总线拓扑 (16)3.3 环型拓扑 (17)3.4 网状拓扑 (18)三、常用车载网络通信协议 (18)四、车载网络通信设备 (20)1. 车载通信控制器 (21)2. 车载通信接口 (22)3. 车载通信线缆 (23)4. 车载通信设备故障诊断与维修 (25)五、车载网络通信系统的应用 (26)1. 汽车电子控制单元的通信 (28)2. 车辆网络化控制系统 (29)3. 车载信息服务系统 (30)4. 车载导航与娱乐系统 (31)六、未来发展趋势与挑战 (32)1. 车载网络通信技术的创新 (33)2. 车载网络通信的安全性问题 (35)3. 车载网络通信的标准化与互操作性 (36)4. 车载网络通信在智能交通系统中的应用 (37)一、基础概念车载网络通信技术:车载网络通信技术是指在汽车内部,通过各种通信协议和设备,实现车辆内部各个系统之间以及车辆与外部环境之间的数据传输和信息交互的技术。
通信协议:通信协议是车载网络通信的基础,它规定了车辆内部各个系统之间以及车辆与外部环境之间的数据传输格式、通信速率、可靠性等方面的要求。
车载通信设备:车载通信设备包括车载以太网、车载CAN总线、车载FlexRay总线、WiFi等,它们是实现车载网络通信的关键组件。
车载网络拓扑结构:车载网络拓扑结构是指车辆内部各个系统之间的连接关系和组织方式,常见的拓扑结构有星型、总线型和环型等。
车载网络通信协议栈:车载网络通信协议栈是指为实现车载网络通信而建立的一组层次化的协议,包括物理层、数据链路层、网络层、传输层和应用层等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
4.1 Wakeup functions
Wakeup: Wakeup:唤 件 个单 , 控 单 可 唤 从单
(1)A开
传输。 传输。
传输数据 W1) 传输数据 为触发唤 单 (W1) 据 , 单 来, 们 执 数据 ,
CAN总线触发 (2) 过CAN总线触发 们 从
控单 W2) 数据 控单 (W2) 传输(W3) 传输(W3) 传输 们 W4) 数据从 单 (W4)
为两种, 为两种, CAN总线唤 (从总线静 总线唤 来)。
来) 控 单 唤 (从
3 车载网络
FlexRay总线为 总线为
结构
车载网络结构
3.1 FlexRay Application: in BMW
4. BMW
7系车载网络系统 系车载网络系
4.1 FlexRay !˜
结构
4.2 BMW
7系总线 控 系
诊断系 CAN总线 系统 - 诊断系统CAN总线 , 个CAN 系统
系统CAN总线 系统CAN总线
款车 款车
改为MOST总线 改为MOST总线
2.2 奥 A6 CAN系统组 系
2.3 仪 网关
网关 关 车 块架 仪 内,网
总线间、 与总线系 总线间、诊断仪 与总线系统 连 控 口。 口。
单 间
2.4 网络管 工 网络管
高 100kbit/s,驱动系统 传输 ,驱动系 PQ24fiJ}&/ fiJ}&/
车载网络控 带 车载网络控 单
PQ35fiJ}&/ fiJ}&/
5G 结构 CAN数据总线系统,并 G 数 总线系
现 单线 LIN数据总线。 数 总线。
1.1 5 众车系CAN网络 类 众车系 网络
总线系 为驱动系 适系统 众 车 CAN总线系统设 为驱动系统、 适系统、 总线 系统 系统 诊断系统这5个 系统、仪 系统、诊断系统这 个局 网。
网络管 网络管 工 总线 两种。 唤 两种。 关闭 功 , 过关断 进 静电 求 开关 , , 为 启动 ,
锁车状态, ; 车辆还处 锁车状态, 为唤 控 单 控 单 控 单 传感 可 。 状态 为 降 静电 须 进
,
功 功
, ,
备状态。 备状态。 时,
须 时唤 ,总线唤 功
为对总线 唤 功
过对总线干扰实现强 应来实现 , 过对总线干扰实现强 。唤
1. y 车网络设计 标
从Colt开 , Colt开 车载 高可 减 线 改进控 强ECU诊断功 强ECU诊断功 ECU诊断 减 MMC) 车公 (MMC) 系统产 系统产 CAN总线 CAN总线
2. stem Configuration( ) (
为 500 kbps: ETACS:
系统 角传 动稳 控 系统,转 角传感 ,空调。。 时 系统 报警控 系统 开关,电动车 开关, 开关, 开关,
组 仪 ECU 电 车 电 设备,转 设备,
5 kbps:
4. 网络设计
车载诊断协议标 : - ISO15765 ,Keyword Protocol 2000 (KWP2000) ) : - Sleep / Wakeup functions ( - Diagnosis function(诊断) (诊断) /唤 )
- ¿ 适系统CAN总线、 适系统 总线、 总线
适系统 ( 适系统CAN总线连 空调控 单 、 车辅 控 单 、 车控 单 、 电 总线连 空调 车门控 单 、电 转 车门控 盘、电 锁控 单 、驻车加热控 单 、轮 气压监控控 单 , 驻车加 气压监控控 控 单 ) 管 单 、 功
-
系统 总线、 系统CAN总线、 总线
控单 (2) 控单
继续请求 果没 继续请求标 , 果没 对 单 (S1)。 S1)。
单 ,它发 (3) 进 , 个从属单 S2) 状态 过 (S2)
数据传输, 个 传输,
时间内, 时间内,
4.5 诊断功 诊断功
Flow of software development for communications system
(3) 单 尽 开 (4)从单 尽 启动
4.4 Sleep function
(1) 个从属单 , 帧 给 。 标 1级 , 规 数据传输 设 沟 续请 继续请求 继续请求标 0级 传输数据 传输数据 果没 , 果没 传输 个
时间内发 ,它 认为 没 断监控 断监控
求继续 继续。 讯 求继续。 个给 连续标 设
- 诊断系统K线 L线。 诊断系 线 线
2.1 奥 A4 CAN系统组 系
2. 奥 车系 CAN总线 总线
CAN系 括: 奥 A6 CAN系统 括:
驱动( CAN总线 总线( - 驱动(动 )系统CAN总线( 500kbit/s )、 适系统CAN总线、 适系统CAN总线、 总线 系统CAN总线、 系统CAN总线、 总线 控 单 。
CAN数据总线 过 数
适系统 适系统 传输 为62.5kbit/s CAN-BUS; ; 为500kbit/s CAN数 数
1998› ,PASSAT Golf 驱动系统 › 驱动系
加 传输
PASSAT Golf}i/f }i/f
带 网关
22 CAN数据总 2 数
适系统 高 CAN数据总线 设计标 ,将 适系统CAN数据总 数 数 高 500kbit/s; ; 32 CAN 2
CAN系统
5个
系统
1.2 5 众车系驱动系统CAN总线 众车系驱动系 总线
驱动系 驱动系统CAN总线 总线 CAN总线。控 单 总线。 总线 传输 为500kbit/s 高
驱动数据 过CAN驱动数据总线 CAN-H 驱动数
据交换 线 CAN-L线来进 数据交换。 线来进
驱动系统CAN总线 组 图
1.3 5 众车系 适系统CAN总线 众车系 适系统 总线
,车门、 备厢盖、车 盖 车门、 备厢盖 车 。
2. 奥 车系 CAN总线 总线
括: 奥 A4 CAN系统 括: 系
- 驱动系统CAN总线( 500kbit/s )、 驱动系 总线( 总线
(驱动系统CAN总线连 发动机控 单 、变 驱动系 总线连 发动机控 、电 驻车 动控 单 、 控 单 、 动ESP控 单 、 控 ) 气 控 单 调节系统控 单 调节系
最新车载网络设计
内容简要: 内容简要: 大众系列 奥迪A4/A6 奥迪A4/A6 宝马7 宝马7 网络结构 网络设计方法! 网络设计方法!
1. 5 众车系 众车系
1997› ,PASSAT¿ › 据总线; 总线; 2000› , 众公 › 线; 2001› , 众公 › 线 传输 2002› , 众 团 › 数据总线; 总线; 2003› , 众 团 ›
CAN驱动数据总线 CAN-H线 CAN-L线来进 数据 驱动数据 驱动数 线 线来进 交换, 传输 总线。 总线。 为100kbit/s, , 称为 CAN
适系统CAN总线 组 图
1.4 5 众 罗车系节约 罗车系
功
-b b
开关关闭 控 单
况 ,为 降
电,连
CAN数据总线 数
唤
驱动系 驱动系统CAN总线 控 单 总线 。 开 钥 适系统 适系统CAN总线 , 过 总线 开关, 闪烁报警 开关,激 闪烁报警 状态发 变 , 总 开关 开 唤 : 可识别 动 可识别 唤