机器人视觉跟踪与控制研究
机器人视觉和控制技术研究
机器人视觉和控制技术研究随着科技的不断进步和人类知识的不断积累,机器人领域得到了越来越广泛的关注,并且不断涌现出各种新的应用、新的技术和新的方法。
其中,机器人视觉和控制技术是机器人发展的重要组成部分,也是该领域中备受瞩目的研究方向之一。
那么,机器人视觉和控制技术具体指的是什么呢?在这篇文章中,我们将从多个方面细致地探究这个话题。
一、机器人视觉技术机器人视觉技术,顾名思义,是指让机器人通过视觉系统获取丰富的图像信息,并将其转化为计算机可以理解和处理的数字信号的一种技术。
与人类眼睛类似,机器人的视觉系统包括镜头、图像处理器、数字信号处理器等多个组成部分。
当机器人的视觉系统获取一张图像时,首先需要进行一系列的预处理工作,包括图像去噪、图像增强、边缘检测、目标分割等,以便更好地识别出目标信息。
之后,机器人将通过计算机视觉算法对图像进行分析和处理,并将结果反馈给机器人的控制系统,以便机器人采取相应的行动。
机器人视觉技术的应用范围非常广泛,包括自主导航、物体识别、场景分析、检测和测量等。
例如,现代工业机器人可以利用视觉系统来识别出不同的零部件,并对它们进行分拣、拼装等工作;自主地面和空中机器人可以利用视觉反馈和深度学习等技术来自主导航和避障,以实现预设的任务目标。
二、机器人控制技术机器人控制技术是指利用计算机和相关软件等对机器人进行控制、管理和监控的技术。
在机器人控制领域,最核心的问题是如何设计合适的机器人控制算法,并将其运用到机器人的运动控制、力控制、动作规划和轨迹跟踪等方面。
目前,机器人控制技术主要有以下几种形式:1.关节空间控制关节空间控制是一种基本的机器人控制技术,它是通过控制机器人的各个关节来实现对机器人的控制。
这种控制方式最为简单,但对机器人的硬件和运动控制算法要求比较高,适用范围有限。
2.末端执行器控制末端执行器控制是指直接控制机器人的末端执行器运动,以实现机器人的控制。
这种控制方式可以直接控制机器人的末端效应器的力和位置,适用范围比关节空间控制广泛,但也需要更加复杂的硬件和控制算法。
基于视觉跟踪的并联机器人控制系统研究

FRONTIER DISCUSSION | 前沿探讨基于视觉跟踪的并联机器人控制系统研究何崇帅 周宇 敖翔武汉东湖学院机电工程学院 湖北省武汉市 430212摘 要: 本文以OMRON Adapt Hornet 565 3轴并联机器人为研究对象,对基于视觉跟踪技术的并联机器人控制系统进行了研究。
文中详细描述了相机校准、模型配置、传送带校准、传感器校准以及机器人示教等过程,并对其进行了测试操作。
测试证明,该并联机器人可以在视觉的引导作用下实现传送带上散乱目标的准确、快速抓放操作,能用于电子、医药、食品等工业自动化生产或包装流水线的分拣、抓放、包装等操作。
关键词:机器人视觉;并联机器人;运动控制1 引言近些年,随着国内外机器人产业飞速发展以及人工智能领域取得巨大进步,机器人在人类生活中扮演的角色越来越重要。
随着“中国制造2025”的提出,工业机器人作为智能制造的重要成员之一,也得到了迅猛发展[1]。
与串联机器人相比,并联机器人具有结构简单、速度快、定位精度高、稳定性好等优点[2],已成为目前工业机器人研究热点之一。
机器视觉跟踪技术作为一个新兴的科研学科领域,可实现无接触检测、无接触识别定位等功能[3]。
利用机器视觉跟踪技术来引导工业机器人完成工作,可使工业机器人对环境感知能力越来越高,能更高效地完成工作[4]。
本文以OMRON旗下的Adept Hornet 565型Delta并联机器人为研究对象,对基于视觉跟踪的并联机器人控制系统进行研究。
2 并联机器人结构和工作流程本次研究借助本校并联机器人实训平台来完成。
其构成主要分为以下几个部分:机器人主体、视觉系统、控制系统、传送带装置以及操作系统。
其硬件结构如图1所示。
2.1 机器人主体主体为OMRON旗下的Adept Hornet 565型Delta并联机器人,包括驱动装置、传动装置和控制系统等。
驱动装置由三台机器人电机和一台旋转电机组成,分别对应三个支链和一个驱动轴。
机器人视觉测控技术的研究进展
机器人视觉测控技术的研究进展在当今科技飞速发展的时代,机器人视觉测控技术作为一项关键的前沿技术,正日益展现出其巨大的潜力和广泛的应用前景。
这项技术使得机器人能够像人类一样通过“眼睛”感知和理解周围的世界,并在此基础上进行精确的测量和控制,从而实现各种复杂的任务。
机器人视觉测控技术的核心在于让机器人能够获取、处理和分析视觉信息。
这就好比给机器人装上了一双敏锐的“眼睛”,使其能够识别物体的形状、颜色、大小和位置等特征。
为了实现这一目标,需要一系列的硬件设备和软件算法协同工作。
在硬件方面,高分辨率的摄像头是关键组件之一。
这些摄像头能够捕捉到清晰、准确的图像,为后续的处理提供优质的原始数据。
此外,照明系统的设计也至关重要,合适的光照条件可以增强图像的对比度和清晰度,有助于提高物体识别的准确性。
在软件算法方面,图像处理技术是基础。
通过对采集到的图像进行去噪、增强、分割等操作,提取出有用的信息。
特征提取算法则能够从图像中识别出关键的特征点,如边缘、角点等,这些特征对于物体的识别和定位非常重要。
目标检测与识别是机器人视觉测控技术的重要应用之一。
通过训练模型,机器人能够识别出不同的物体,并确定它们在空间中的位置和姿态。
这在工业生产中具有广泛的应用,例如在自动化装配线上,机器人可以准确地抓取和装配零件。
在测量方面,机器人视觉可以实现高精度的尺寸测量和三维建模。
通过多视角的图像采集和处理,能够构建出物体的三维模型,从而获取物体的详细尺寸和形状信息。
这对于质量检测、逆向工程等领域具有重要意义。
在控制方面,机器人视觉测控技术能够实现实时的反馈控制。
例如,在机器人的运动控制中,通过视觉系统实时监测机器人的位置和姿态,与预设的轨迹进行对比,及时调整控制参数,确保机器人的运动精度和稳定性。
近年来,深度学习技术的发展为机器人视觉测控技术带来了新的突破。
基于深度学习的神经网络模型,如卷积神经网络(CNN),在图像识别和目标检测方面取得了显著的成果。
机器人视觉导航与控制
机器人视觉导航与控制第一章:绪论随着机器人技术的快速发展,机器人越来越成为现代制造、医疗、军事等领域中不可或缺的工具之一。
在许多机器人应用中,机器人必须能够准确感知周围环境,识别和跟踪特定的对象,并在不同的环境中进行导航和控制。
其中,机器人视觉导航与控制是其中至关重要的一环。
机器人视觉导航与控制涉及到计算机视觉、机器学习、控制理论等各方面的知识,需要综合运用多种算法和技术。
本文将对机器人视觉导航与控制的基本原理、应用与发展进行介绍。
第二章:机器人视觉导航机器人视觉导航是指通过视觉传感器收集环境信息,利用计算机视觉技术对环境进行识别和建模,再根据目标位置生成移动轨迹实现自主导航。
下面将详细介绍机器人视觉导航的关键步骤。
2.1 环境感知机器人需要能够感知环境以获取有用信息。
为此,机器人一般搭载各种传感器,包括激光雷达、摄像头、雷达等。
其中,摄像头是机器人中最常用的视觉传感器,可以捕捉周围环境的图像和视频。
2.2 特征提取机器人需要从环境中提取出与导航有关的特征,例如墙壁、门、地面等,并且能够区分出不同的特征。
特征提取是机器人视觉导航中的关键步骤。
2.3 场景建图场景建图是指机器人基于收集到的环境信息,使用SLAM算法(Simultaneous Localization and Mapping)将环境进行建模。
建模后的地图包括障碍物、地形、建筑等信息,是机器人进行导航决策的重要依据。
2.4 路径规划机器人需要根据建模后的地图信息,设定目标点并规划路径,以实现导航。
在路径规划中,机器人需要解决避免障碍物的问题,保证最短路径和最优路径的选择。
2.5 运动控制机器人需要控制运动以沿着规划好的路径移动。
这涉及到机器人的控制系统,如速度、加速度和姿态等参数的调整。
第三章:机器人视觉控制机器人视觉控制是指机器人通过视觉传感器对周围的物体进行检测和追踪,并对机械臂进行控制,实现对物体的精确定位、抓取、移动等操作。
3.1 目标检测目标检测是指机器人能够在图像中识别出目标物体,并辨别物体的类型。
机器人视觉感知与控制技术国家工程研究中心运行制度
机器人视觉感知与控制技术国家工程研究中心运行制度1. 引言1.1 研究背景机器人视觉感知与控制技术国家工程研究中心是一个专注于研究机器人视觉感知与控制技术的国家级研究中心。
随着科技的不断发展和人工智能领域的快速发展,机器人技术已经逐渐走进人们的生活,成为人们生活和生产的重要工具。
机器人在执行不同任务时需要进行视觉感知和控制,以完成复杂的工作。
加强对机器人视觉感知与控制技术的研究具有重要意义。
1.2 研究目的机器人视觉感知与控制技术国家工程研究中心的研究目的主要包括以下几个方面:1. 探索机器人视觉感知技术的前沿发展,推动机器人在视觉感知领域的突破和创新,提高机器人对环境的认知能力和自主行为能力。
2. 研究机器人控制技术的理论与方法,提升机器人在不同场景下的运动控制精度和稳定性,为机器人在各种复杂环境中的实际应用提供技术支持。
3. 积极建设和完善国家工程研究中心的运行制度,促进研究中心内部资源和人员的协同互动,提高研究成果的转化和应用效率。
4. 促进机器人视觉感知与控制技术在工业制造、医疗保健、智能交通等领域的应用与发展,推动我国机器人产业向高质量发展迈进。
通过这些研究目的的实现,机器人视觉感知与控制技术国家工程研究中心将为我国机器人领域的发展做出更大的贡献,提升我国在机器人技术领域的国际竞争力,推动机器人技术的不断创新和进步。
1.3 研究意义机器人视觉感知与控制技术国家工程研究中心的建立具有重要的研究意义。
随着人工智能和自动化技术的快速发展,机器人在各个领域的应用越来越广泛。
而机器人视觉感知与控制技术又是机器人发展中至关重要的一部分,它可以使机器人更加智能化和灵活化。
建立这样一个国家级研究中心将有助于推动我国机器人领域的科技创新和产业发展。
机器人视觉感知技术可以使机器人像人类一样通过视觉感知周围环境,识别物体和障碍物,从而更好地执行任务。
而机器人控制技术则是指控制机器人进行各种动作和操作,实现人机交互和自主决策。
机器人视觉与运动控制技术研究
机器人视觉与运动控制技术研究一、引言机器人技术是现代工业的重要组成部分,其在生产、医疗、教育等领域都有广泛应用。
机器人的视觉和运动控制技术是机器人实现智能化的核心,其发展研究受到了研究者们的广泛关注。
本文将就机器人视觉和运动控制技术研究进行探究,并结合具体应用案例说明其在机器人领域中的重要性。
二、机器人视觉技术研究机器人视觉技术是指机器人利用摄像头等视觉传感器获取外部环境信息,并对相关的目标进行识别、定位、跟踪等处理。
机器人的视觉技术主要涉及两个方面:视觉系统和视觉算法。
1. 视觉系统机器人的视觉系统主要包括摄像机、图像采集卡、处理器等组成部分。
其中,摄像机是视觉系统的最主要组成部分,通过摄像机将环境信息转化为电子信号并传递给图像采集卡。
图像采集卡是负责将摄像机采集的信号进行数字化处理,并将其传送至处理器。
处理器是视觉系统的核心部分,其通过对图像采集卡传来的数据进行处理和识别分析,为机器人提供决策依据。
2. 视觉算法机器人视觉算法是机器人实现智能化的关键,其主要包括面部识别、颜色识别、目标跟踪等技术。
其中,面部识别技术是应用比较广泛的一种算法,主要利用机器学习方法对现有的人脸图像进行训练,以此提高识别的准确率。
三、机器人运动控制技术研究机器人运动控制技术是机器人实现精密控制的核心,其主要包括运动控制器和电机执行器两个方面。
1. 运动控制器运动控制器是机器人运动控制技术的核心,其主要负责机器人的控制和指令,用于指导电机执行机构的运动。
目前,运动控制器主要涉及伺服控制器、步进控制器、位置控制器等技术,通过使机器人按照预先设定的运动参数来执行动作。
2. 电机执行器电机执行器是机器人实现动作的重要组成部分,其主要包括伺服电机、步进电机等。
伺服电机是实现机器人运动精度高、定位准确度高的一种电机,其主要应用于需要高端控制的机器人,例如工业机器人、医疗机器人等。
而步进电机则主要应用于一些精度不高、需要频繁调整的场合。
机器人视觉中三维目标检测和跟踪技术研究
机器人视觉中三维目标检测和跟踪技术研究一、前言机器人视觉技术在现代科技领域中起到了不可替代的作用,随着科技的不断发展,机器人视觉技术在各个领域得到了广泛应用。
其中,机器人视觉中三维目标检测和跟踪技术是其中的一个重要方向。
二、三维目标检测技术三维目标检测技术,顾名思义,是指机器人通过摄像头等设备获取目标的三维信息,并完成对目标的检测。
在实际应用中,三维目标检测技术可以应用于机器人导航系统、无人驾驶、视频监控等领域。
下面,我们分别介绍三维目标检测技术中的两种常见方法:1. 基于深度图的三维目标检测技术基于深度图的三维目标检测技术是通过单目或者双目相机获取深度图,然后采用机器学习算法进行目标检测。
具体而言,这种方法可以通过生成候选框来完成目标检测,目标检测的过程中需要使用传统的两维卷积网络并结合深度信息进行目标分类。
2. 基于点云的三维目标检测技术基于点云的三维目标检测技术则是通过获取点云数据来完成目标检测,常用的获取点云数据的设备包括激光雷达、RGB-D相机等。
相对于深度图方法来说,基于点云的三维目标检测技术更具有优势,它可以在三维空间中对目标精准定位。
三、三维目标跟踪技术三维目标跟踪技术是基于三维模型进行目标跟踪的技术,它能够实时、准确地跟踪目标,并配合机器人的导航技术,实现自主导航。
下面,我们介绍三维目标跟踪技术中的两种常见方法:1. 基于二维图像的三维目标跟踪技术基于二维图像的三维目标跟踪技术是通过从二维图像中提取出关键点,然后将其映射到三维模型上,最后完成目标跟踪。
其中,关键点的提取可以通过SIFT、SURF等算法来实现,映射则是利用摄像头拍摄的图像与三维模型之间的对应关系。
2. 基于激光雷达的三维目标跟踪技术基于激光雷达的三维目标跟踪技术是通过激光雷达获取物体的三维点云数据,然后将其与三维模型匹配来完成目标跟踪。
与基于二维图像的方法相比,基于激光雷达的方法更具有稳定性和准确性。
四、总结机器人视觉中三维目标检测和跟踪技术是目前机器人技术中的热门研究方向之一,它广泛应用于机器人导航系统、无人驾驶、视频监控等领域。
机器人视觉测量与控制技术研究
机器人视觉测量与控制技术研究随着科技的不断进步,机器人在各个领域中得到越来越广泛的应用。
机器人不仅可以用于工业制造、医疗、军事,还可以用于日常生活中的家庭服务,由此可见,机器人在未来的发展中将会越来越重要。
然而,在机器人技术中,视觉测量与控制技术是非常重要的一块,本文将围绕这一话题展开讨论。
视觉测量技术是一种用于获取图像中物体空间位置和大小的技术。
基于视觉测量技术,机器人可以实现自主感知和理解环境,而后作出相应的行动。
目前,视觉测量技术已经被广泛应用于机器人导航、目标跟踪、三维重建等领域,并且随着技术的不断进步,其适用范围还将会不断扩大。
视觉测量技术的核心是图像信息的处理,其中图像特征提取和匹配是相对瓶颈性的两个环节。
在图像特征提取方面,常用的算法有SIFT、SURF等。
这些算法可通过对图像中的关键点进行提取,进而建立图片之间的对应关系。
在匹配方面,常用的算法有FLANN、FAST等。
这些算法可实现对不同图片的匹配和识别。
除了视觉测量技术外,机器人视觉控制技术也是机器人技术的重要领域之一。
视觉控制技术是指将机器人与摄像机相结合,通过视觉传感器获取环境信息,并向机器人发送控制指令,使其完成相应的任务。
视觉控制技术的应用领域十分广泛,比如自动驾驶、机器人视觉检测等。
值得一提的是,机器人视觉控制技术最近在自动驾驶领域中的一些应用。
目前,自动驾驶技术已经有了很大的进步,并且更多公司正在研究相应的技术。
机器人视觉控制技术在自动驾驶领域中扮演了核心的角色。
当车辆行驶过程中,摄像机能够实时获取道路状况,并向系统发送控制指令,调整车辆的行驶状态。
这种技术的应用,不仅可以提高行驶的安全性和舒适性,也能够提高车辆的行驶效率。
在机器人视觉测量与控制技术中,深度学习技术是一个重要的支持。
深度学习技术通过建立人工神经网络,实现对数据集的学习和识别,进而建立图像特征和匹配模型。
随着深度学习技术的不断进步,其在机器人视觉测量与控制技术中的应用也将会越来越广泛。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2、基于视觉的焊缝跟踪机器人
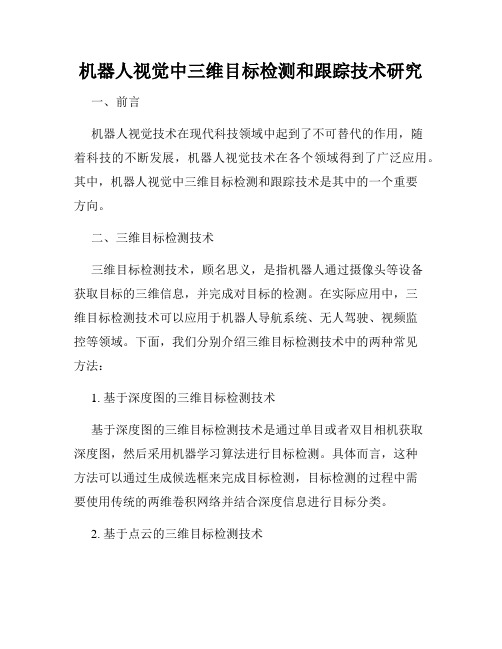
➢ 图像处理
反色原始图像
目标频域特性
增强后目标图像
二值化目标图像 中国科学院自动化研究所
目标图像边缘
细线化条纹
2、基于视觉的焊缝跟踪机器人
➢ 焊缝图像处理与特征提取
第i幅反色原始图像
第i+1幅反色原始图像 目标区域消除飞溅后的 图像与提取出的特征点
1) 落点预测精度<1cm, 20组数据均值6.5mm 2) 击打点预测精度<1.5cm,20组数据均值13.3mm
中国科学院自动化研究所
3、打乒乓球机器人
并行处理高速视觉 同 步 触 两台摄像机同时采集并处 发 采 理图像,实现同一时刻两 集 模 幅图像的分布式并行计算。块
➢ 摄像机静止-目标静止:主要针对图像处理进行研究,如图像 拼接、人脸识别等,大多属于模式识别的研究范畴
➢ 摄像机运动-目标静止:包括多个摄像机从不同的视角观察目 标, 主要研究目标表面信息的获取,如基于视觉的三维重构等
➢ 摄像机静止-目标运动:主要针对固定场景中运动目标的监控, 如视觉监控、视觉引导下的机器人作业等。
XhBiblioteka Oh {H}ZhYh
2 1
Zw {W}
Xw
Ow
Yw
P
xh zh tan1 D / 2
L1
1
L2
Zh
1
yh
1 2
v1d u1d
sin(1 2 ) v2d
cos1
u2d
s
in(1 cos2
2
)
zh
C1
{H}
Yh
Oh
C2
D
Xh
中国科学院自动化研究所
视觉系统标定
视觉系统自标定
➢ 基于相对运动的自标定
利用机器人末端的至少两次平 移运动,标定出立体视觉系统 的参数
p5 0 (u1qj1 p1)
s pqj
p6 dxpqj p7
0
p5 0
p5 0 p5
(v1qj1
p2 )
(u2 qj 1 (v2 qj 1
p3 ) p4 )
3、打乒乓球机器人
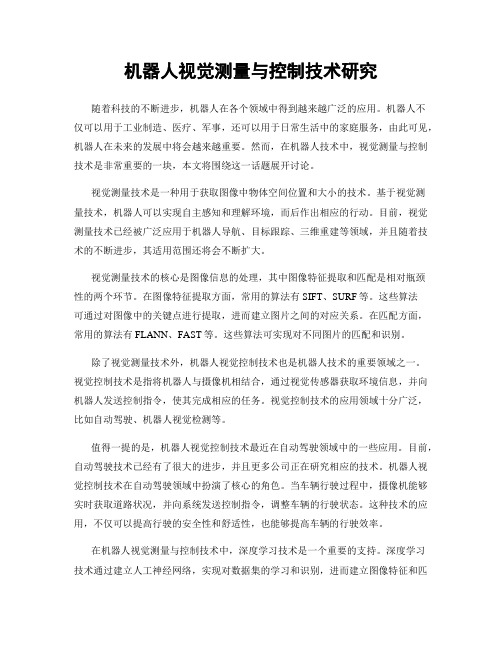
反弹轨迹与击球点预测
800
600
400
200
0
Sampled point
200
Initial point
0
Prediction trajectory
1500 1000
500
-200
0
Y (mm)
-500 -400 -1000
X (mm)
预测的飞行轨迹, 计算落点, 包括位置和速度
视觉系统标定
趋近与抓取实验
中国科学院自动化研究所
研究内容
主要研究内容
➢ 视觉系统标定 ➢ 目标分割与图像处理 ➢ 视觉测量与视觉控制
中国科学院自动化研究所
目标分割与图像处理
一般的流程图
机器人视觉跟踪与控制研究
内容提要
研究背景 研究内容 实验平台 小结
中国科学院自动化研究所
研究背景
机器人视觉,通过图像获得外界信息,用于机器 人对环境的感知。
提高机器人智能性、环境适应性、自主行为的重 要途径。
近年来机器人领域的研究热点之一。
中国科学院自动化研究所
利用反弹模型计算弹起速度
以落点为初始点,以弹起速 度为初始速度,利用飞行模 型预测弹起轨迹
在弹起轨迹上,Z=Zd的位 置为击球位置点,计算击球 点球的速度和方向
Z (mm)
中国科学院自动化研究所
3、打乒乓球机器人
落点与击打点预测
Z (mm) Z (mm)
rpq
0 0 ( p6 dxpqj1)
S:相对图像特征 r: 相对位置
中国科学院自动化研究所
视觉系统标定
无标定主动立体视觉
建立了一种主动视觉测量模型,利用摄像机的偏转角,计 算出目标的三维坐标, 不需要摄像机的内外参数
中国科学院自动化研究所
采集一幅图像
特征提取
图像预处理
目标分类
图像分割
运动规划
中国科学院自动化研究所
目标分割与图像处理
高压线路巡检机器人
悬垂线夹
避雷线
地担 横担
导线 防震锤
绝缘子
拉线基础 杆塔基础
直线杆型
跳线 耐张线夹
拉线
钢筋混凝 土电杆
巡检机器人
地面基站
巡检机器人运行模拟图
耐张杆型
Measured
30
Predicted
260
25
255
Measured Predicted
20
250
15
245
10 1000
240 1000
500
800
600
0
400
200
-500
0
Y (mm)
-1000
-200 -400
X (mm)
500
800
600
0
400
200
-500
0
-200
Y (mm)
-1000 -400
视觉系统标定
无标定主动立体视觉
a2
xw xh zh sin1 cos2 a2 sin1 sin2 d1
yw zw
wTh
yh zh
zh
cos1 cos2 zh sin2 a2
a2 cos1 sin2 cos2 d1
1 1
1
zh D /(tan1 tan2 )
Virtual plane
Xw Zw Ow
Yw
Ball trajectory
Hub Net line
World frame
Video output line
Monitor A Monitor B PC
中国科学院自动化研究所
3、打乒乓球机器人
主要技术指标
识别球速范围0~8m/s 识别准确率>95% 定位精度<0.5cm 数据发送周期10~12ms 乒乓球飞行过对方1/2球台时:
➢ 摄像机运动-目标运动:目标运动(包括场景变化),摄像机跟随 载体运动。难点在于摄像机位置和姿态的确定、目标运动轨迹 的预测以及载体的运动规划等。
中国科学院自动化研究所
一、摄像机静止-目标运动
中国科学院自动化研究所
1、五自由度视觉伺服机器人
中国科学院自动化研究所
目标分割与图像处理
悬垂线夹的识别
中国科学院自动化研究所
目标分割与图像处理
左拐弯线夹的识别
中国科学院自动化研究所
目标分割与图像处理
右拐弯线夹的识别
中国科学院自动化研究所
X (mm)
落点
击打点
中国科学院自动化研究所
3、打乒乓球机器人
获得关键技术
提出了一种分布式计算的高速立体视觉测量系统 针对高速立体视觉系统,提出一种新的乒乓球目标识别、特征提取与
跟踪算法,具有实时性好、抗干扰能力强、对光照变化适应能力强等 特点 提出了一种高精度的乒乓球轨迹测量方法,利用测量出的乒乓球的若 干离散位置点拟和出测量轨迹 结合乒乓球飞行与碰撞机理建立了乒乓球的飞行和碰撞模型,实现了 乒乓球后续飞行轨迹、落点和击打点的预测 提出了一类运动控制方法与击球控制策略等 完成了5自由度打乒乓球机器人的机构设计,制作了打乒乓球机器人
对规则焊缝效果好,不 适应于多层多道焊缝和 坡口不规则焊缝
二值化图像
条纹数组的二阶差分
中国科学院自动化研究所
2、基于视觉的焊缝跟踪机器人
管件埋弧焊的焊缝跟踪
埋弧焊,圆管焊缝,适应于压力 容器等管件焊接
埋弧焊,圆管焊缝跟踪
中国科学院自动化研究所
•
x
Ax
Bu
y Cx D
x [u v p q u [lat lon ]T
a b]T
9.2999 6.3915 1 0 0
中国科学院自动化研究所
视觉测量与视觉控制
移动机器人视觉控制 — 跟随、围捕
中国科学院自动化研究所
内容提要
研究背景 研究内容 实验平台 小结
中国科学院自动化研究所
实验平台
按照摄像机与目标的关系, 视觉系统可归纳为四种模式:
GPS天线
摄像机 自驾系统 中国科学院自动化研究所
地磁计 无线数传
四通道实验辨识模型
考虑俯仰和横滚通道的耦合模型
俯仰
G(S) 0.1053s 3.707 s2 6.97s 4.082
横滚
G(S)
0.5583s 0.4061 s2 1.507s 0.7614
内容提要
研究背景 研究内容 实验平台 小结
中国科学院自动化研究所
研究内容
主要研究内容
➢ 视觉系统标定 ➢ 目标分割与图像处理 ➢ 视觉测量与视觉控制
中国科学院自动化研究所
视觉系统标定
视觉系统自标定
➢ 基于环境信息的自标定
• 利用环境中的正交平行线
获得消失点,标定摄像机
图像
的内参数
• 利用环境中的正交平行线
Zc1
确定摄像机的姿态
Oc1
Yc1
• 提出了利用正交平行线可
Xc1
靠标定摄像机内参数的必
要条件
P2
W Yw
P1
Ow
Xw
P3
P4
Zw
平行线与其成像直线