国开机考《机电一体化系统》第5套
机电一体化第五章1.2节ppt课件

计算机控制接口包括信息采集接口和控制输出接口; 人机接口包括输入接口和输出接口。
编辑版pppt
23
一、模拟信息采集接口
在模拟量信息采集通道中,先利用传感器将
从信号源检测的非电量转换为电量,并进行信号 处理(主要是放大),再经采样—保持器,将 模拟信号变换成时间上离散的采样保持信号后, 送A/D转换器将模拟保持信号转换成数字信号, 送入计算机。
32
A/D转换 器
图5-4 ADC0808编/辑0版p8pp0t 9原理图
33
在A/D转换器内部有一个高阻抗斩波稳定比较 器,一个带模拟开关树组的256电阻分压器组成的 D/A转换器,以及一个逐次逼近型寄存器。
8路的模拟开关的通/断由地址锁存器和译码器 控制,可以在8个通道中任意访问一个单边的模拟 信号。
37
图5-5 ADC0808/0809时序图
编辑版pppt
38
(3)时序图
选通道:从图5-5可以看出,启动脉冲 START和地址锁存允许脉冲ALE的上升沿 将地址送给地址总线,模拟量经C,B,A 选择开关所指定的通道送至A/D转换器。
转换过程:在START信号下降沿的作用下, 逐次逼近过程开始,在时钟的控制下,一
编辑版pppt
8
1.可编程序控制器
可编程序控制器简称PLC,是继电器逻辑控制技术与计算 机技术相结合而发展起来的一种工业控制计算机系统。 它的低端为继电器逻辑的代用品,而其高端实际上是一 种高性能的计算机实时控制系统。它以顺序控制为主, 能完成各种逻辑运算、定时、计数、记忆和算术运算等 功能,既能控制开关量,又能控制模拟量。
编辑版pppt
11
主要特点如下:
(1)控制程序可变,具有很好的柔性。
2018更新最新电大国家开放大学机电一体化系统教学考一体化网考形考作业试题及答案
(2018更新)最新电大国家开放大学《机电一体化系统》教学考一体化网考形考作业试题及答案100% 通过2016年秋期河南电大把《机电一体化系统》纳入到“教学考一体化”平台进行网考,针对那个平台,本人汇总了该科所有的题,形成一个完整的题库,内容包括了单项选择题、判定题,而且以后会不断更新,对考生的温习、作业和考试起着超级重要的作用,会给您节省大量的时刻。
做考题时,利用本文档中的查找工具(Ctrl+F),把考题中的关键字输到查找工具的查找内容框内,就可迅速查找到该题答案。
本文库还有其他网核及教学考一体化答案,敬请查看。
一单项选择题1.齿轮传动比的分派中,遵循“前大后小”原那么的是( )(分)A. 质量最小原那么(大功率传动装置)B. 最小等效转动惯量原那么(小功率传动装置)C. 质量最小原那么(小功率传动装置)D. 最小等效转动惯量原那么(大功率传动装置)2. 机电一体化技术是各类技术彼此渗透的结果,以下技术不属于其要紧相关技术的是( )(分)A. 机械技术B. 自动操纵技术C. 多媒体技术D. 检测传感技术3.对步进电机每施加一个电脉冲信号,它的转子就转过一个固定的角度,那个角度称为()。
(分)A. 齿距角B. 转差角C. 步距角D. 失调角落4. 受控变量机会械运动的一种反馈操纵系统称( )。
(分)A. 数控机床B. 顺序操纵系统C. 工业机械人D. 伺服系统5.(分)A. 加工精度B. 运动位置C. 进给速度D. 主轴转速6.滚珠丝杠副排除轴向间隙的目的主若是()。
(分)A. 提高利用寿命B. 减小摩擦力矩阵C. 增大驱动力矩D. 提高反向传动精度7.机电一体化系统中,依照操纵信息和指令完成所要求的动作这一功能的是( )。
A. 机械本体B. 动力部份C. 操纵器D. 执行机构(分)A. 操纵器B. 动力部份C. 机械本体D. 执行机构8.进给伺服系统对()不产生阻碍。
A.(分)A. 加工精度B. 运动位置C. 主轴转速D. 进给速度9. 以下那个不是谐波齿轮传动的特点()。
国家开放大学电大《可编程控制器应用》机考第五套真题题库及答案
国家开放大学电大《可编程控制器应用》机考第五套真题题库及答案国家开放大学电大《可编程控制器应用》机考第五套真题题库及答案盗传必究试卷总分:100答题时间:60分钟客观题一、单项选择题(共10题,共30分) 1.把可编程序控制器系统和()系统各自的优势结合起来,可形成一种新型的分布式计算机控制系统。
A继电器控制B集散控制C工业计算机控制D嵌入式2.根据I/O点数分类,I/O点数为2052的PLC属于()。
A大型PLCB中型PLCC小型PLCD微型PLC3.()将输入端不同电压或电流信号转换成微处理器所能接收的电平信号。
ACPUB导轨C电源模板D输入模板4.PLC工作过程中,()是按照顺序将所有信号读入到寄存输入状态的输入映像区中存储。
A输入采样阶段B程序执行阶段C网络通信D输出刷新阶段5.PLC的语句指令中,()定义要执行的功能,即告诉CPU该做什么。
A标识符B参数C操作码D操作数6.通电延时定时器(TON)的输入(IN)电路()时被复位,复位后其常开触点(),常闭触点(),当前值等于0。
A断开、接通、断开B断开、断开、接通C接通、断开、断开D接通、接通、断开7.输入继电器是S7-200PLC接受外部输入的开关信号的窗口,下面对其描述不正确的是()。
A输入继电器的文字符号是IB输入继电器的触点可以无限制使用C输入继电器的状态仅取决于用户程序的控制D输入继电器没有线圈但有触点8.S7-200PLC定时器指令中,T36的定时精度为0.01s,如果设定值为100,则其定时时间为()。
A0.0001sB0.01sC0.1sD1s9.指出下列正确的指令。
()ALDNM0.0BCTDC300,2CTOFT300,6DNOTQ0.010.对以下程序段分析正确的是()。
A如果M0.1的状态设置为“0”,M0.0的状态恒为“0”。
B如果M0.1的状态设置为“1”,M0.0的状态恒为“0”。
CM0.0的状态恒为“0”。
2024春期国开电大专科《机电一体化系统》在线形考(形考任务1至4)试题及答案.pptx

国开电大专科《机电一体化系统》在线形考
形考任务1至4
试题及答案
说明:资料整理于2024年4月;适用于2024春期国开电大专科学员一平台在线形考考试。
一、判断题(每个2分,共18分)1.滚珠丝杆机构不能自锁。
B.错
.转动惯量大不会对机电一体化系统造成不良影响。
三、综合题(每个5分,共30分) 某光栅传感器,刻线数为100线∕mm,设细分时测得莫尔条纹数为400,试计算光栅位移是多少毫米?若经四倍细 分后,记数脉冲仍为400,则光栅此时的位移是多少?测量分辨率是多少?17.细分时测得莫尔条纹数为400时,设光 栅位移为Xmm,则X值为(八)。 ∣A.4mm∣ B.2mm C.lmm
D.机械学与计算机 .机电一体化系统(产品)设计方案的常用方法无(D)。 A.取代法 B.整体设计法 C.组合法 D经验法 .在机电一体化系统中,机械传动要满足伺服控制的三个主要要求是(八)。 A.传动精度、稳定性、快速响应性 传动精度、稳定性、低噪声 C.传动精度、高可靠性、小型轻量化 D.传动精度、高可靠性、低冲击振动 18.在设计齿轮传动装置时,对于转动精度要求高的降速齿轮传动链,可按什么原则进行设计(八)。 A.输出轴转角误妾蠢示 B.等效转动惯量最小
C.磁阻式 D.机械式
=.综合题(每个11分,共22分) CKD系列某一数控铳床工作台进给用的滚珠丝杆副,已知平均工作载荷Fm=4000N,丝杠工作长度1.=1.4m,平均 转速nm=100r∕min,丝杠材料为CrWMn钢,求滚珠丝杠的计算载荷FC022.设载荷系数fw,可靠性系数fc,精度系数fa,则 FC的计算公式为(B)。 23.⅞fw=1.2,fc=1.0,fa=1.0,则FC的计算睡(八)。∣A.4800N
[(精华版)国家开放大学电大《Windows网络操作系统管理》机考第五套标准试题及答案]
![[(精华版)国家开放大学电大《Windows网络操作系统管理》机考第五套标准试题及答案]](https://img.taocdn.com/s3/m/f16b32ee580216fc710afdba.png)
[(精华版)国家开放大学电大《Windows网络操作系统管理》机考第五套标准试题及答案](精华版)国家开放大学电大《Windows网络操作系统管理》机考第五套标准试题及答案盗传必究第五套试卷总分:100 答题时间:60分钟客观题一、配伍题(共1题,共10分)1. (请为名词①~⑤选择表示其含义的描述,将配对好的a~b填写到括号中,每空2分,共10分)① Windows Server 2016 ② Windows Server 2003 ③ Windows 10 ④ Linux ⑤ Windows 7 a 能够提供Hyper-V功能b 不能提供Hyper-V功能①:a ②:b ③:a ④:b ⑤:b 二、判断题(共9题,共18分)1. 一个域中可以包含工作组。
()F × 2. 一个用户帐户可以同时被多个用户使用。
()T √ 3. 一个域中不可以有多台域控制器。
()F × 4. MBR 格式的磁盘,最多支持4个主分区。
()T √ 5. 第二代虚拟机使用不同的硬件型号,并全面支持第一代虚拟机的所有旧设备。
()F × 6. 共享文件夹权限只对用户通过网络访问这个文件夹时起到约束作用,如果用户在这个文件夹所在的计算机上以交互式方式访问它时,则不会受到共享文件夹权限的限制。
()T √ 7. 在安装DHCP服务器角色之前,应该为DHCP服务器本机配置静态IP地址。
()T √ 8. 在互联网上,所有维护根域“.”的DNS服务器被称作“根DNS服务器”,这些服务器是由13个完全限定域名(FQDN)来表示。
()T √ 9. 部署VPN解决方案的人员,需要具有本机Power Users组的成员身份。
()F × 三、单选题(共11题,共33分)1. 为了能够实现网络通信,管理员需要为计算机上的网卡等网络设备设置TCP/IP参数,主要包括:IP地址、()、默认网关、首选DNS服务器等正确答案:子网掩码2. 在工作组中,每台计算机把自己的资源信息、用户帐户信息和安全信息存放在本地的()中正确答案:SAM数据库3. 使用()工具,可以从Active Directory回收站恢复已删除的对象正确答案:Active Directory 管理中心 4. (),提供对AD DS 对象及属性的定义,通常不会经常查看或变更它们正确答案:架构5. 基本磁盘可以被划分为()和扩展分区等正确答案:主分区6. 在Windows Server 2016中可以使用命令(),来验证物理服务器是否满足安装Hyper-V服务的要求正确答案:systeminfo.exe 7. NTFS权限通常可分为:()和特殊权限正确答案:标准权限8. DHCP客户端可以从四个级别分配到所需的DHCP选项,这四个级别为:()、作用域级别、类级别和保留级别正确答案:服务器级别9. 在一台DHCP服务器上,针对同一个网络地址只能建立()个作用域正确答案:1个10. 将DNS客户机请求的IP地址解析为对应的完全限定域名的过程称为()查询正确答案:反向11. Windows Server 2016支持的VPN协议有:()、L2TP/IPSec、SSTP 和IKEv2 正确答案:PPTP 四、多选题(共5题,共15分)1. 以下关于组帐户描述正确的有()。
《机械制图》期末机考试题(第5套) - 国开大学满分版

《机械制图》期末机考试题(第5套) - 国
开大学满分版
机械制图期末机考试题
题目一
根据给定的图纸,完成以下任务:
1. 绘制图纸中的零件的三视图(主视图、俯视图和侧视图)。
2. 标注零件的尺寸和注释,并添加必要的标记。
3. 根据图纸上的要求,计算零件的质量。
题目二
根据给定的图纸和要求,完成以下任务:
1. 绘制组装图,展示零件的拼接方式和顺序。
2. 标注组装图中零件的序号和名称。
3. 根据要求,计算组装后产品的总质量。
题目三
根据给定的图纸和要求,完成以下任务:
1. 绘制图纸中的零件的三维模型。
2. 使用适当的软件进行零件的三维建模。
3. 根据要求,计算零件的体积和表面积。
题目四
根据给定的图纸和要求,完成以下任务:
1. 绘制图纸中的零件的剖视图。
2. 标注剖视图中的特征尺寸和注释。
3. 根据要求,计算剖视图中的面积。
题目五
根据给定的图纸和要求,完成以下任务:
1. 绘制图纸中的零件的等轴测图。
2. 标注等轴测图中的尺寸和注释。
3. 根据要求,计算等轴测图中的体积。
以上是《机械制图》期末机考试题的五个题目,每个题目都要按要求绘制图纸、标注尺寸和注释,并进行必要的计算。
请根据题目要求完成相应的任务。
祝你考试顺利!。
5机电一体化技术(控制系统)第五章PPT课件
e(t)dtTD
de(t)
dt
G(s)
U(s) E(s)
Kp1T11s
TDs
36
37
计算机控制中的离散控制公式: 代入PID控制公式:及递推公式,位置式PID
38
PID算法软件流程,e(0-1)值取e(0),开始偏差变 化率为0,可使动作不至于过大,因为u(0)=0
39
位置式PID算法的缺点: ❖ 由于全量输出,每次输出均与过去状态有关,
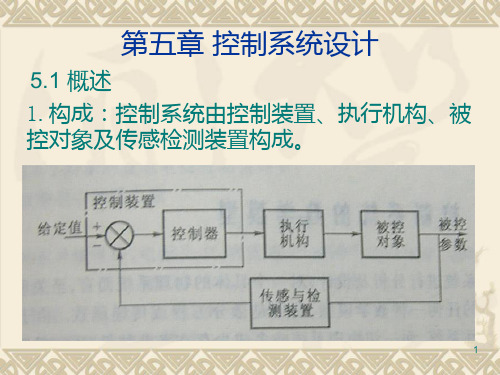
3
3.对控制系统的要求: 稳:针对闭环系统,当参数匹配不当时,会引 起振荡。 准:调节过程结束后输出量与给定量之间的偏 差越小越好。 快:当系统输出量与输入量之间产生偏差时, 消除这种偏差的快速程度。 因系统的稳准快是相互制约的,故被控对象不 同,各种系统对稳准快有所侧重。快速性好, 可能引起振荡,或超调,控制精度变差。
18
传递函数的定义和性质
设线性定常系统由下述阶线性常微分方程描述:
a0d dnnty(t)a1d dnn t 11y(t) an1d dyt(t)any(t) b0d dm m tu(t)b1d dm m t 11u(t) bm1d dut(t)bmu(t)
由定义得系统传递函Байду номын сангаас为
G (s) U Y ( (S s))b a 0 0 s sm n b a 1 1 s sm n 1 1 b a m n 1 1 s s a b m n
24
5)转矩平衡方程及其拉氏变换
Tm(t)
Jem
dm(t)
dt
Bemm(t)TL(t)
(9)
Tm(s)TL(s)Jemsm(s)Bemm(s) (10)
m(s)
Tm(s)TL(s) BemJems
国家开放大学《机电一体化系统》期末考试复习题及参考答案
第一套题判断题(共14题,共28分)1. 安全可靠性高是机电一体化产品与传统机电产品相比唯一具有的优越性。
T √F ×参考答案:F;考生答案:F;试题分数:2;考生得分:22. 在机电一体化系统中,通过提高驱动元件的驱动力可有效提高系统的稳定性。
T √F ×参考答案:F;考生答案:F;试题分数:2;考生得分:23. 在滚珠丝杠机构中,一般采取双螺母预紧的方法,将弹性变形控制在最小限度内,从而减小或部分消除轴向间隙,从而可以提高滚珠丝杠副的刚度。
T √F ×参考答案:T;考生答案:F;试题分数:2;考生得分:04. 敏感元件不可直接感受被测量,以确定关系输出某一物理量,如弹性敏感元件将力转换为位移或应变输出。
T √F ×参考答案:F;考生答案:T;试题分数:2;考生得分:05. 传感器的输出信号为开关信号(如光线的通断信号或电触点通断信号等)时的测量电路称为开关型测量电路。
T √F ×参考答案:T;考生答案:T;试题分数:2;考生得分:26. D/A转换就是指模数转换。
T √F ×参考答案:F;考生答案:F;试题分数:2;考生得分:27. 伺服电机的驱动电路就是将功率信号转换为控制信号,为电机提供电能的控制装置。
T √F ×参考答案:F;考生答案:T;试题分数:2;考生得分:08. 在机电一体化系统驱动装置中,反馈通道上环节的误差与输入通道上环节的误差对系统输出精度的影响是不同的。
T √F ×参考答案:F;考生答案:T;试题分数:2;考生得分:09. I/O接口电路也简称接口电路。
它是主机和外围设备之间交换信息的连接部件(电路)。
它在主机和外围设备之间的信息交换中起着桥梁和纽带作用。
T √F ×参考答案:T;考生答案:T;试题分数:2;考生得分:210. 球坐标式机器人。
球坐标式机器人具有一个转动关节和二个移动关节,具有三个自由度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
如果前五题和你的试题顺序是一样的,那恭喜你。这
套题就是你需要的,不用怀疑!
国开机考《机电一体化系统》第5套100分
客观题
判断题(共14题,共28分)
1. 转动惯量大不会对机电一体化系统造成不良影响。
参考答案:×
2. 在机电一体化系统中,通过提高驱动元件的驱动力可有效提高系统的稳
定性。
参考答案:×
3. 滚珠丝杆机构不能自锁。
参考答案:√
4. 传感器的灵敏度越高越好。因为只有灵敏度高时,与被测量变化对应的
输出信号的值才较大,有利于信号处理。
参考答案:×
5. 旋转变压器和光电编码盘不能测试角位移。
参考答案:×
6. SPWM是脉冲宽度调制的缩写。
参考答案:×
7. 直流伺服电动机在一定电磁转矩T(或负载转矩)下的稳态转速n随电
枢的控制电压Ua变化而变化的规律,称为直流伺服电动机的调节特性。
参考答案:√
8. 在机电一体化系统驱动装置中,反馈通道上环节的误差与输入通道上环
节的误差对系统输出精度的影响是不同的。
参考答案:×
9. I/O接口电路也简称接口电路。它是主机和外围设备之间交换信息的连接
部件(电路)。它在主机和外围设备之间的信息交换中起着桥梁和纽带作用。
参考答案:√