MWC飞行控制器设置说明书
mwc飞控使用简单说明

mwc飞控使⽤简单说明各位亲,⼤家好!⾸先⾮常欢迎您选择使⽤我们的飞控板。
由于货源问题,本次我们⼀共有3种飞控板,其使⽤的传感器都是相同的,功能也⼀样,只是pcb板布局有些差别,不过不会影响使⽤,并且软件源码开放,使⽤是⾮常⽅便的,很适合初学者上⼿和⾼⼿深⼊。
电赛⼤家的时间都紧张的,我就不废话了。
我将结合⼀些⾼清⽆码⼤图,⼀步步给⼤家详细介绍飞控板怎样和电脑相连,怎样烧写应⽤程序,飞控板怎样和上位机相连进⾏测试。
为了⽅便介绍,我将飞控板分别称为⿊⾊⼤板⼦,蓝⾊⼩板⼦,蓝⾊⼤板⼦,如下图所⽰。
⼀、关于bootloader这些飞控板mcu的bootloader都已经烧写好了,并且经过了测试,这部分⼤家可以先不⽤关注,⼤赛在前,时间宝贵。
我们直接跳到应⽤程序烧写。
如果您发现bootloader有什么问题了,应⽤程序⽆法烧写,⼀定要第⼀时间联系我们,我们将尽⼒为您解决。
⼆、应⽤程序烧写如果您拿到的是⿊⾊⼤板⼦和蓝⾊⼩板⼦,那和电脑连接将⾮常简单,如下图所⽰。
如果您拿到的是蓝⾊⼤板⼦,连线要稍微⿇烦⼀点点,不过也只是⼀点点啦,要相信⾃⼰,都是要参加⽐赛的⼈了,这些都⼩case 了,so easy ,哪⾥不会点哪⾥,⿇⿇再也不会担⼼我不会写程序了O(∩_∩)O~~如下图所⽰,编程器的+3.3v 排针不接,然后从上往下依次是DTR 接飞控板的DTR ,TX 接飞控板的RXD ,RX 接飞控板的TXD ,+5V 接飞控板的+5V ,GND 接飞控板的GND ,是不是很简单^-^连接成功以后可以通过设备管理器查看端⼝号。
打开解压我们提供的资料,安装Arduino IDE 开发环境。
然后打开MultiWii_2_0.ino⽂件(存储路径\MultiWii_2_0\MultiWii_2_0\ MultiWii_2_0.ino),界⾯是酱紫的。
点击菜单栏的Tools 选项,在Board项中选择Arduino Pro or Pro mini/ATmega328(不能选择上⾯的Aduino Duemilanove w/ATmega328哦,有童鞋就因为选择了这个,结果两个板⼦都不能烧写然后打电话说我们的东西有问题,o(╯□╰)o)。
模拟飞行 BMS 中文手册 通信和导航 5.5备用

跑道排队前的最后一次雷达定位总是最棘手的。
根据进近程序,最后一个雷达定位点和最后进近航道之间的转弯将对其余程序起决定性作用。
在这种情况下,跑道轴线上有两个雷达定位点:距离跑道入口9NM处的MILLY和距离跑道入口6NM处的IF(初始定位)BULWO。
即使在Milly米利的初始定线错误,到达布尔沃时也很容易Bulwo纠正。
当然,显示ILS指针更有帮助,这也是我建议您启用它们的原因(如果有的话)。
ILS指针将提供最后一个转弯时间的视觉提示,并与跑道保持一致,以避免超调,并引导您下降到最小值。
在最后进近航道有两个雷达定位大大减少了潜在的问题,因为在IF的最后一个转弯将更小,几乎不需要提前。
所以在最坏的情况下,飞机将在IF排队等候。
不幸的是,这是我们并不总是拥有的奢侈品。
当进近跑道上只有一个雷达定位点时,这个问题可能更为重要,如果该雷达定位点接近跑道入口,则更为重要。
超调量很可能会使这种方法变得不可能。
归根结底是如何创建ATC文件的(有关创建ATC文件的说明,请参阅BMS技术手册)IF(此进近的BULWO)通常是距离地面2000英尺处的阈值约6海里的一个点。
它是ILS进近中常用的外标志点,在这里起落架下降,下滑道被拦截。
IF是最后进近的起点。
所以降下你的档位,减速到在速度AOA,在3°的下滑道下降(HUD上的-2.5°虚线是一个很好的参考线索)。
ATC进近将指示您切换到塔台频率。
当你需要精确飞行时,总是很难开始按下按钮,所以尽可能多地预先计划是如此重要。
将UHF无线电切换至预设8(记住简报),并通过ATC菜单上的Tower塔台页面报告final最后段,开始与塔台联系。
塔台将在最后一个进近圆锥上探测到你的位置,如果你离得太远,它可能会告诉你继续进港,或者如果你离得足够近,可以让你着陆。
如果塔台不能探测到你在圆锥内,空中交通管制会把你踢出着陆队列,重新安排你进近。
空中交通管制塔台不提供对跑道的指引,因此,如果您仍然没有看到跑道,请继续飞行最后进近航道,或者继续跟随ILS指针(如果有)。
MWC飞控

CRIUS MWC MultiWii SE v2.5 飞控板MWC是不带任何说明书和操作指南,可以自己登陆官网查看,以下为官网网址:SE v2.5 硬件特点1 优化布局,信号输入/输出接口位置更合理;2 更换性能更好的陀螺/加速度一体化6轴传感器;2 使用专用I2C电平转换IC;2 具有FTDI保护设计,防止外部供电与USB供电冲突;3 带有I2C(5V电平)接口,可连接I2C-GPS导航板/OLED显示屏等外围设备;4 尺寸紧凑,可装在迷你机架上,也可通过CRIUS分电板转换成“标准”45mm安装孔距。
MWC固件简介MWC是MultiWii Copter的缩写,它并不是指硬件产品,而是开源固件。
此固件的原创作者是来自法国的Alex,他为了打造自己的Y3飞行器而开发了最初的MWC固件(原创交流帖与官网的链接在最下方)。
几年来经过许多高手的参与及共同努力,开发进度越来越快。
现在MWC 已经基本成熟,可以支持更广泛的硬件平台、外围设备及更多飞行模式,让运行MWC的飞控硬件成为国外开源飞控市场上占有率最高之一的产品。
MWC固件支持的硬件平台MWC固件是用Arduino IDE来编写,支持Arduino发布的几种主要的AVR开发板Pro Mini/Pro Micro/Mega等,也可支持使用STM32的Arduino兼容平台,但STM32目前无法体现出任何性能与端口上的优势,所以仍以AVR为主流,成熟、够用且稳定。
本产品CRIUS MultiWii Standard Edition(SE) v2.0是基于Arduino Pro Mini来设计,使用ATmega328P单片机。
MWC固件支持的外围设备1 蓝牙调参模块- 用安卓手机/平板电脑来调试参数(推荐使用)2 OLED显示屏模块- 可作为机载状态/参数显示器,也可搭配遥控器进行参数调试(不建议使用)3 I2C-GPS导航板- 328P飞控可通过它连接GPS,用于定点/自动返航以及航点飞行功能4 GPS - 用于定点/自动返航5 OSD - FPV必备,可显示飞控与GPS数据6 数传模块- APC2XX/Xbee/3DR Radio等,用于遥测功能7 光流模块- 用于定点飞行8 声纳模块- 用于低空高精度定高飞行CRIUS的2款飞控,运行MWC时所支持的设备对比AIOP:1/2/4/5/6/7/8SE:1/2/3/4/5/6/8MWC固件支持的飞行器模式下载最新的固件可支持以下飞行器模式,可自由在源代码中选择所需的模式并上传到飞控。
飞享屋MWC飞控新手入门及MWC开源原理图

MWC 开源飞控的编译环境为开源的 Arduino 环境。Arduino 是基于 C 语言 的开源编译环境,对硬件的功能进行软件封装,比较方便使用。与此对应的是有 很多相关的硬件产品可以使用,价格相对比较低廉,集成度较高,硬件开源也方,以及界面图片
接收机:
1.
任何标准接收机,不少于 4 个无线通道
2.
任何 PPM 接收机
伺服电机
1.
最多 4 个任意标准的 50hz 私服
电机电调
1.
醉倒 8 个标准电调,刷新频率 488hz
传感器
1.
MEMS 陀螺仪
1.
2x IDG-650, 1x ISZ-650
2.
ITG3200
3.
b) MEMS 加速计
MWC 的飞控板有两种类型,arduino 328P 和 arduino mega。以 328P 为 例,只需要一个基于 Arduino 的最小系统就可以,pro mini 就是很好的选择,在 这个系统上根据 MWC 程序中的引脚调用画一个外围板即可。如果觉得 pro mini+ 外围板的形式不够简洁,那么将两者结合成一个板子也是不费力的事情,毕竟 pro mini 本身也是开源的,按着画就可以了。 下面给出 MWC 飞控板(328P)中文原理图,pro mini 的原理图,尺寸图,实 物图
以上是维基词条中的翻译内容。详细的系统资料在 config.h 文件中都可以了解
到。这个文件后面飞享屋再整理给大家。
关于 MWC 开源飞控的简单介绍可以总结为下,其中一些名词请参考飞享屋新手 启航区博客“无人机常用词解析”: 支持的无人机类型及图片如下: BICOPTER TRICOPTER: QUAD +: QUAD X: HEX Y6: HEX FLAT + HEX FLAT X OCTO X8
Myflydream AP飞控 最新中文说明书

MyFlyDream AutoPilot使用手册V1.0注意事项感谢您购买MyFlyDream 飞控(以下简称MFD AP或者AP).请根据本文档熟悉本产品及其操作方法. 本产品是一款精密的电子设备. 请仔细阅读本文档以防止设备受损.本产品只适用于模型娱乐用途, 请在遵守当地相关法律规定的前提下使用. 因可靠性和精度受多个因素影响: 强烈的电磁干扰, 恶劣的GPS星况或者其他若干原因都可能导致不理想的效果. 使用本产品导致的所有风险和后果由用户承担.我们保留不停改进和提高产品性能的权利, 所以本文档的内容不一定与您手上的产品规格完全符合, 请到我们的网站下载本文档的最新版本:1.系统的组成2.工作原理和特点MFD AP内建三轴陀螺仪,三轴加速度计,三轴电子罗盘以及气压计等传感器。
AP用一个处理器专门负责飞控的姿态估算,另一个处理器则负责处理OSD画面和飞行逻辑。
基于这些软硬件,AP可以用于增加飞机的稳定度,或控制飞机按设计的航线和高度飞行,实现自动驾驶。
MFD AP的先进特性包括:1)全姿态的AHRS,最大滚动角速率为2000deg/s2)像素级的黑白双色OSD,刷新率>30fps,界面元素刷新无滞后3)集成对MFD AutoAntennaTracker(AAT)的支持,无缝接驳MFD自动跟踪天线系统4)通过OSD可实现所有参数的调节和航点的可视化设置,无须PC参与5)支持MAVLink协议,可以兼容开源地面站APM Planner,设置航点和实时显示飞行参数3.性能参数4.连接MFD AP的插针按功能可以分为A~J接口,如上图所示。
与周边主要设备连接示意图:A)Power此接口为飞控提供电源。
MFD AP可以用7~20V供电。
但因为AP提供给摄像头和图传的电源直接取自飞控的电源输入,所以建议使用12V为飞控供电。
这样可以直接让飞控供电给大多数12V的摄像头和图传,总体接线比较简洁。
B)CH1~CH6 Input此接口与RC接收机连接,读取来自RC接收机的6 个PWM通道信号。
MWC multiwii MWC 说明 教程 入门

这里 有4个 功能,只启 用 其中 一个
1
这 是 解 释 说 明.
2
3
这个就 是没用的句子.
4
这个就 是有用的句子.
这里 的1060是 飞控 解锁时 的油 门最底 值. 如果 飞控 解锁,电机就 转; 可以 降低 这个值;不低 于1020. 标 准 信 号100 0~2 000us
QUADP
QUADX
科技 QQ群:185406936 淘 宝 店: /
Y4
TRI
这里两个 电机是指 一个在上 一个在下
6轴 模 式 , 电 机 D5和 D6, 如 果 程 序 中 开 启 A0与 A1, A0取 代 5, A1取 代 6, 如 果 不 这 样 就 需 要PPM SUM接 收 机 Jr卫 星 S.Bus信 号 输 入 才 能 使 用6轴 , 不 用PPM输 入 又 要 使 用6轴 , 就 不 能 用 云 台 增 稳 功 能 , 除 非 使 用P RO专 业 版 飞 控
启 用 这 个 可 支 持 六 轴 , 会 让 云 台 增 稳 失 效 。 要 用 云 台 增 稳 就 不 能 做6轴
/* PIN A0 and A1 instead of PIN D5 & D6 for 6 motors config and promini config This mod allow the use of a standard receiver on a pro mini (no need to use a PPM sum receiver)
2:Arduino集 成 开 发 环境。(升降程序用)
/files/arduino-0023.zip
3:JAVA虚 拟 机.(GUI图形观察调试飞行器)
MultiWii MWC 飞控 电调设置教程
MultiWii MWC 飞控电调设置教程
一、预备工作
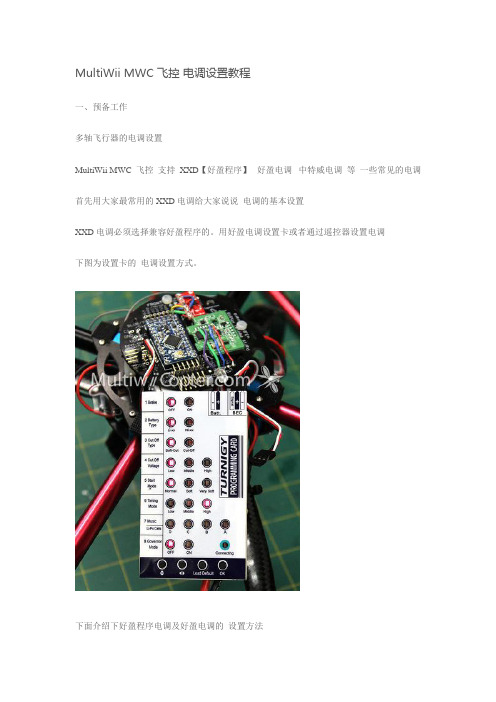
多轴飞行器的电调设置
MultiWii MWC 飞控支持XXD【好盈程序】好盈电调中特威电调等一些常见的电调首先用大家最常用的XXD电调给大家说说电调的基本设置
XXD电调必须选择兼容好盈程序的。
用好盈电调设置卡或者通过遥控器设置电调
下图为设置卡的电调设置方式。
下面介绍下好盈程序电调及好盈电调的设置方法
MultiWii MWC 飞控需要将电调设置成以下参数
1、刹车【关】
2、电池类型【锂电】
3、低压保护方式【逐渐降低功率】
4、低压保护阀值【低】
5、启动模式【普通启动】
6、进角【高】
7、定速【关】注:配置卡可以设置
8、恢复出厂设置
9、退出
电调油门行程设置
以XXD好盈程序电调为例
连线方式如下图:
如果手头有舵机Y线就方便多了,可以把多个电调连接一起然后汇总到一根线连接到接收机上!
设置方法如下图:。
MultiWii MWC 飞行配置软件GUI图解
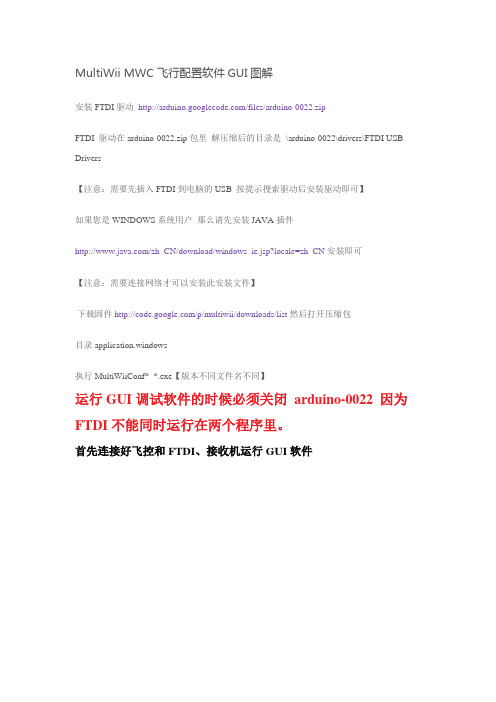
MultiWii MWC 飞行配置软件GUI图解安装FTDI驱动/files/arduino-0022.zipFTDI 驱动在arduino-0022.zip包里解压缩后的目录是\arduino-0022\drivers\FTDI USB Drivers【注意:需要先插入FTDI到电脑的USB 按提示搜索驱动后安装驱动即可】如果您是WINDOWS系统用户那么请先安装JAVA插件/zh_CN/download/windows_ie.jsp?locale=zh_CN安装即可【注意:需要连接网络才可以安装此安装文件】下载固件/p/multiwii/downloads/list然后打开压缩包目录application.windows执行MultiWiiConf*_*.exe【版本不同文件名不同】运行GUI调试软件的时候必须关闭arduino-0022 因为FTDI不能同时运行在两个程序里。
首先连接好飞控和FTDI、接收机运行GUI软件如上图先选择FTDI的COM口然后点击START 开始在点击READ 读取飞控数据!首先是遥控器摇杆正反向检查和舵量调整。
打开遥控器。
看上图1、推油门【THROTTLE状态条向上运动】收油门【THROTTLE状态条向下运动】2、推俯仰【PITCH 状态条向上运动】拉俯仰【PITCH 状态条向下运动】3、副翼打左边【ROLL 状态条向左运动】副翼打右边【ROLL 状态条向右运动】4、方向舵打左边【YAW 状态条向左运动】方向舵打右边【YAW 状态条向右运动】5、如果您接收机与飞控连接了AUX1为某开关通道,请拨动此开关注意GUI里的AUX1状态条同样有变化。
以上操作如果出现反向的请您设置遥控器通道反向以实现上面的动作要求。
其次就要调整遥控器的舵量。
1、当所有通道在中立点的时候查看GUI窗口里数值是不是在1500左右【数值偏差+ - 5】2、当所有通道在最低点的时候查看GUI窗口里数值是不是在1095左右【数值偏差+ - 5】3、当所有通道在最高点的时候查看GUI窗口里数值是不是在1905左右【数值偏差+ - 5】如果您在操作遥控器摇杆的时候,不是以上数值请您修改遥控器舵量设置并达到以上动作要求。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
感谢选用克瑞斯MWC系列飞控!本手册将引导您从零开始,逐步安装、调整和飞行,并提供一些基本技巧,让您可以轻松掌握此高性价比飞控的使用经验。
本手册将会根据MWC程序的升级进行相应更新,如有需要,请打印出来阅读。
MWC对遥控器的功能有一定要求,通道数不少于5个,其中一个为两段式或者三段式开关,需要有通道中立点和行程调整功能。
从未使用过的MWC,需按照以下步骤设置和安装好,才能开始飞行时的调试:1.烧写Bootloader到飞控上的单片机,让飞控可以自由导入程序;2.用Arduino编辑MWC程序,然后用FTDI工具把程序上传到飞控;3.安装到机架上,接好所有相关的连接线;4.飞行前用MWC GUI配置程序,对飞控进行基本设置;5.外场飞行时用电脑、蓝牙模块或者LCD模块来调整PID及其他参数。
接下来将按照以上步骤开始配置您的飞控。
1.烧写Bootloader,我们已经在测试时烧好飞控的Bootloader,否则拿到手也启动不了,更没办法刷程序,所以您不必再理会这个。
如果您的Bootloader出现问题,导致无法启动飞控,请与我们联系。
2.请先准备好以下驱动和程序:以下驱动和程序都可以用于苹果MacOS、Linux与Windows操作系统,我们以Windows 7/32bit为例进行说明。
FTDI工具驱动,FTDI是一种USB转TTL电平的信号转换工具,我们用它来上传需要的程序到飞控,调试时也会用到。
驱动下载后需要手动安装,安装好以后,电脑会出现一个COM口:例如本机上分配到的是COM3,在不同电脑上分配到的端口可能会不一样,但不影响使用。
请务必完成此安装步骤,否则无法上传程序到飞控。
下载地址:/Drivers/CDM/CDM20814_WHQL_Certified.zipMWC程序源代码。
MWC程序升级较为频繁,每次更新都会出现实用的新功能,或者某方面性能得到提高,方便我们随时享用最好的效果。
下载过来的MWC程序包,包括源代码和GUI配置程序两部分,请解压文件。
下载地址:/p/multiwii/downloads/listArduino集成开发环境。
我们使用Arduino这个工具来编辑MWC源代码,进行简单配置后,点击上传,程序就会通过FTDI传输到飞控中。
如有需要调整程序的基础功能(例如切换飞行模式),也将通过它来进行。
下载后请解压文件,程序无需安装。
下载地址:/files/arduino-0023.zipJAVA虚拟机。
也许您的电脑已经安装过,不过为了更好地运行Arduino与GUI程序,请升级到最新版。
下载地址:/zh_CN/download/manual.jsp?locale=zh_CN另外推荐收藏两个网址,分别是MWC官网与RCGroups论坛的MWC主帖,会有最新升级信息以及玩家讨论。
//forums/showthread.php?t=1340771如果您购买飞控时已经指定好飞行模式,我们会对程序做好初步的修改,尽量让您可以直接使用,飞行时调整参数即可(除了Y3),如果发现工作不正常,再来修改程序即可。
本文将以4轴×模式为例,讲解如何配置飞控程序,其他模式于此相同,只有Y3需要单独配置舵机。
准备好以上程序后,我们先打开MWC源代码,首先启动Arduino程序,看到如下窗口:点击菜单中的“File”-“Open”选择好您准备好的MWC主程序工程文件:这里MWC的程序版本为1.9,请选择打开MultiWii_1.0.pde文件,打开后即可看到该工程文件包含多个源代码文本,会在新窗口中显示,之前空白的窗口可以关闭。
我们一般只需修改config.h中的一些程序语句即可,请用鼠标切换至config.h标签,看起来如下图所示。
修改程序语句的方法:每行语句左边带有“/*”或者“//”的时候,显示为灰色,表示该句为注释,是无效的程序语句。
如果需要它生效,只需去掉“//”,它会以黑色显示出来,表示该语句有效。
首先要清楚飞行模式也是从程序中去指定,但考虑到MWC硬件环境以及电调搭配的不同,有些其他关键语句是需要修改的,如果配置有误,会造成程序无法上传或者飞控工作不正常。
我们不会对所有语句进行说明,仅仅修改必要的部分。
请注意,不要轻易改动太多没有把握的语句,否则可能会出现问题而找不出原因在哪里。
我们从上往下看,第一个关键的地方是电调的怠速设置:/* Set the minimum throttle command sent to the ESC (Electronic Speed Controller)This is the minimum value that allow motors to run at a idle speed *///#define MINTHROTTLE 1300 // for Turnigy Plush ESCs 10A//#define MINTHROTTLE 1120 // for Super Simple ESCs 10A//#define MINTHROTTLE 1220#define MINTHROTTLE 1100标准电调通过1000~2000us范围内的信号进行控制,如果您需要飞控解锁后电机就开始慢速旋转,请设定一个合适的怠速信号值(默认是1100,大多数电调会开始输出电流),不过我们相信大多数模友并不喜欢这样做,那么可以设置到电调接近开始启动前的一个信号值,比如1050~1080。
上传程序后如果发现不符合需求,可以再次修改后上传。
接下来是飞行模式的选择:/* The type of multicopter *///#define GIMBAL//#define BI//#define TRI//#define QUADP#define QUADX//#define Y4//#define Y6//#define HEX6//#define HEX6X//#define OCTOX8//#define OCTOFLATP//#define OCTOFLATX//#define FLYING_WING //experimental这里默认就是X模式,您可以根据需要修改成其他模式,需要注意的是,SE标准版和Lite轻量版MWC并不支持8轴的三个模式(OCTO),所以这三行无效。
关于I2C信号频率的选择://#define I2C_SPEED 100000L //100kHz normal mode, this value must be used for a genuine WMP#define I2C_SPEED 400000L //400kHz fast mode, it works only with some WMP clones克瑞斯MWC均良好支持400Khz高速模式,请启用400000L这一行,注释掉第一行。
启用三轴加速度的Z轴控制:/* This option should be uncommented if ACC Z is accurate enough when motors are running*/#define TRUSTED_ACCZ开启此项有助于提高飞控的高度稳定性,请启用。
启用A0与A1端口输出:/* PIN A0 and A1 instead of PIN D5 & D6 for 6 motors config and promini configThis mod allow the use of a standard receiver on a pro mini(no need to use a PPM sum receiver)*/#define A0_A1_PIN_HEX这两个端口原本用于连接云台稳定用的舵机,如果您没有PPM SUM类型接收机又想让SE与Lite飞控支持6轴,请启用它,这样会让云台增稳功能失效。
另外一种情况是,您想使用6轴模式,同时又想启用云台增稳功能,那必须使用PPM SUM接收机/JR卫星/S.Bus.接收机,或者换用PRO版全功能飞控。
启用D8或者D12端口:/* possibility to use PIN8 or PIN12 as the AUX2 RC inputit deactivates in this case the POWER PIN (pin 12) or the BUZZER PIN (pin 8)*/#define RCAUXPIN8//#define RCAUXPIN12SE与Lite飞控带有MODE(AUX)端口,通过三段开关的信号可以控制传感器状态的开和关,如果您觉得还需要AUX2进行更详细的状态控制,包括云台增稳开关或者作为解锁开关来用,可以启用D8或者D12作为AUX2的信号输入端口。
请注意只能启用其中之一。
信号死区宽度:/* introduce a deadband around the stick centerMust be greater than zero, comment if you dont want a deadband on roll, pitch and yaw */#define DEADBAND 6通常接收机出来的信号脉宽会有1~3us的误差(这是我们用信号测试仪检测的结果),设置一个合理的死区宽度,可以让飞控忽略这种轻微的误差,避免误差的信号直接去控制飞控动作。
设置得过大的话,会让摇杆附近范围内的微小动作被飞控忽略到,反而降低飞控灵敏度,默认值为6。
下面是非常关键的传感器类型选项:/* if you use a specific sensor board:please submit any correction to this list.Note from Alex: I only own some boardsfor other boards, I'm not sure, the info was gathered via rc forums, be cautious *///#define FFIMUv1 // first 9DOF+baro board from Jussi, with HMC5843 <- confirmed by Alex//#define FFIMUv2 // second version of 9DOF+baro board from Jussi, with HMC5883 <- confirmed by Alex//#define FREEIMUv1 // v0.1 & v0.2 & v0.3 version of 9DOF board from Fabio//#define FREEIMUv03 // FreeIMU v0.3 and v0.3.1//#define FREEIMUv035 // FreeIMU v0.3.5 no baro//#define FREEIMUv035_MS // FreeIMU v0.3.5_MS <- confirmed by Alex#define FREEIMUv035_BMP // FreeIMU v0.3.5_BMP//#define PIPO // 9DOF board from erazz//#define QUADRINO // full FC board 9DOF+baro board from witespy with BMP085 baro <- confirmed by Alex//#define QUADRINO_ZOOM // full FC board 9DOF+baro board from witespy second edition <- confirmed by Alex//#define ALLINONE // full FC board or standalone 9DOF+baro board from CSG_EU//#define AEROQUADSHIELDv2//#define ATAVRSBIN1 // Atmel 9DOF (Contribution by EOSBandi). requires 3.3V power.//#define SIRIUS // Sirius Navigator IMU <- confirmed by Alex//#define SIRIUS600 // Sirius Navigator IMU using the WMP for the gyro//#define MINIWII // Jussi's MiniWii Flight Controller//#define CITRUSv1_0 // CITRUSv1 from qcrc.ca//#define DROTEK_IMU10DOF如果是SE版飞控,请直接启用define FREEIMUv035_BMP如果是Lite版飞控,请启用如下两个地方的语句://if you use independent sensors//leave it commented it you already checked a specific board above/* I2C gyroscope */#define ITG3200//#define L3G4200D/* I2C accelerometer */#define ADXL345//#define BMA020//#define BMA180//#define NUNCHACK // if you want to use the nunckuk as a standalone I2C ACC without WMP//#define LIS3LV02//#define LSM303DLx_ACC请务必仔细确认不同版本飞控的传感器选项,否则飞控将不能正常工作。