驱动芯片的选择
半桥电路和全桥驱动芯片
半桥电路和全桥驱动芯片1. 引言1.1 简介半桥电路和全桥驱动芯片是电子领域中常用的电路和芯片,用于驱动各种电力设备和电机。
半桥电路通过控制半导体器件的通断来实现对电机的控制,常用于单向转动的电机驱动;全桥驱动芯片则可以实现对双向转动电机的精细控制,具有更高的效率和精度。
半桥电路和全桥驱动芯片在工业、汽车、航空航天等各个领域都有着广泛的应用。
在汽车领域,半桥电路可以用于控制汽车的电动窗户、天窗等设备;全桥驱动芯片则可以用于控制电动汽车的电机,提高汽车的性能和节能效果。
这两种驱动方案的出现,提高了电机控制的精度和效率,为各种电力设备的应用提供了更多的选择。
在未来,随着电动化趋势的加速和自动化技术的不断发展,半桥电路和全桥驱动芯片的应用领域将会更加广泛,为人们的生活和工作带来更多的便利和创新。
1.2 应用领域半桥电路和全桥驱动芯片广泛应用于各种电力电子系统中。
它们在电机驱动、电动汽车、充电桩、UPS等领域中起到至关重要的作用。
在电机驱动系统中,半桥电路和全桥驱动芯片可以提供高效的电机控制,实现电机的快速启动和精确控制。
在电动汽车和充电桩中,半桥电路和全桥驱动芯片可以实现电池充电和电机驱动功能,提高系统的整体效率和性能。
在UPS系统中,半桥电路和全桥驱动芯片可以提供可靠的电力转换功能,确保电力系统的稳定运行。
半桥电路和全桥驱动芯片在各种电力电子系统中都有着广泛的应用前景,将会在未来的发展中发挥越来越重要的作用。
1.3 意义半桥电路和全桥驱动芯片作为电子领域中非常重要的组件,在现代电路设计中发挥着至关重要的作用。
它们在各种电子设备中都有广泛的应用,例如电动汽车驱动系统、直流电机控制系统、变频空调控制系统等。
在这些应用领域中,半桥电路和全桥驱动芯片能够有效地控制电流和电压,实现电子设备的高效工作。
半桥电路和全桥驱动芯片的意义在于它们能够提高电子设备的性能和可靠性。
通过合理设计和选择适合的驱动方案,可以有效地提高设备的工作效率,降低能耗,延长设备的使用寿命,同时减少故障率,提高设备的稳定性和可靠性。
步进电机驱动芯片选型指南
以下是中国步进电机网对步进电机驱动系统所做的较为完整的表述:1、系统常识:步进电机和步进电机驱动器构成步进电机驱动系统。
步进电机驱动系统的性能,不但取决于步进电机自身的性能,也取决于步进电机驱动器的优劣。
对步进电机驱动器的研究几乎是与步进电机的研究同步进行的。
2、系统概述:步进电机是一种将电脉冲转化为角位移的执行元件。
当步进电机驱动器接收到一个脉冲信号(来自控制器),它就驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的角度一步一步运行的。
3、系统控制:步进电机不能直接接到直流或交流电源上工作,必须使用专用的驱动电源(步进电机驱动器)。
控制器(脉冲信号发生器)可以通过控制脉冲的个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
4、用途:步进电机是一种控制用的特种电机,作为执行元件,是机电一体化的关键产品之一,随着微电子和计算机技术的发展(步进电机驱动器性能提高),步进电机的需求量与日俱增。
步进电机在运行中精度没有积累误差的特点,使其广泛应用于各种自动化控制系统,特别是开环控制系统。
5、步进电机按结构分类:步进电机也叫脉冲电机,包括反应式步进电机(VR)、永磁式步进电机(PM)、混合式步进电机(HB)等。
(1)反应式步进电机:也叫感应式、磁滞式或磁阻式步进电机。
其定子和转子均由软磁材料制成,定子上均匀分布的大磁极上装有多相励磁绕组,定、转子周边均匀分布小齿和槽,通电后利用磁导的变化产生转矩。
一般为三、四、五、六相;可实现大转矩输出(消耗功率较大,电流最高可达20A,驱动电压较高);步距角小(最小可做到六分之一度);断电时无定位转矩;电机内阻尼较小,单步运行(指脉冲频率很低时)震荡时间较长;启动和运行频率较高。
(2)永磁式步进电机:通常电机转子由永磁材料制成,软磁材料制成的定子上有多相励磁绕组,定、转子周边没有小齿和槽,通电后利用永磁体与定子电流磁场相互作用产生转矩。
关于LED驱动电源那些常见的十款经典LED驱动芯片
关于LED驱动电源那些常见的⼗款经典LED驱动芯⽚⽬前,芯⽚设计⾏业越来越多的⼚家加⼊了LED设计,设计出众多型号,在此从性能价格⽐⽅⾯详细的谈谈,怎样选择⾃⼰合适的IC,哪些IC最合适⾃⼰准备设计的产品。
为IC设计企业了解市场需要什么样的IC,应该制定什么价位中合适。
价格随时会变动只能为参考值。
质量和价格是决定是否采⽤的因数,符合产品设计质量参数要求很重要!价格更重要!1、美国CATALYST公司-CAT4201这个IC驱动1-7颗1W LED。
效率可达92%,6-28V电压输⼊范围降压型驱动应⽤设计。
它最⼤的优势是封装SOT23⼤⼩,线路简介,符合⽬前多数⼩体积灯杯设计使⽤要求。
⼤阻值范围电流调节,可以电位器宽阻值范围调节亮度,⽐如设计台灯等产品需要这样时。
2、美国国家半导体 LM3404LM3404和LM3402的线路⼀样,不同的是电流可以达到1A,驱动1-15pcsLED性价⽐较⾼。
上⾯所列IC规格都是内置MOS管,内置MOS管可以简化线路设计,⼩体积,降低设计综合成本,故障率也会降低。
因其⽬前IC⼯艺制成、成本等原因⼤于1A以上的LED驱动IC需要外置MOS管。
在我们⽇常产品设计中经常会遇到⼤电流设计,⽐如5W、10W等更⾼功率的设计要求,那只能选择外置MOS管的IC才可以。
3、褒贬不⼀的LED驱动芯⽚IC-AMC7150在当时AMC7150还是不错的,它有个很重要的因数就是价格,有不到2元的市场价格,是你采⽤它的理由。
AMC7150⽬前有⼏⼗家可以直接替换的IC型号,价格战会⽆法避免。
在设计参数要求不⾼的低压4-25V产品中可以选择它,基本驱动能⼒在3W以下应⽤设计。
⽐如1W串3颗或3W 1颗LED设计是稳定的。
4、欧洲Zetex公司-ZXLD1350这颗IC⽬前市场反应良好,也是SOT23⼩体积封装,输⼊7-30V电压降压恒流驱动1-7psc LED,线路简洁实⽤。
设计时Rs要紧靠IC避免供电电压⼤幅度不动,这样会影响恒流效果。
常见液晶驱动控制芯片详解

常见液晶驱动控制芯片详解前言因此各位朋友在选择LCD液晶模块的时候,在考虑到串行,还是并行的方式时,可根据其驱动控制IC的型号来判别,当然你还需要看你选择的LCD模块引脚定义是固定支持并行,还是可选择并行或串行的方式。
一、字符型LCD驱动控制IC市场上通用的8×1、8×2、16×1、16X2、16X4、20X2、20X4、40X4等字符型LCD,基本上都采用的KS0066 作为LCD 的驱动控制器。
二、图形点阵型LCD驱动控制IC2.1、点阵数122X32—SED1520。
2.2、点阵数128×64。
(1)RA8816,支持串行或并行数据操作方式,内置中文汉字字库。
(2)KS0108/RA8808,只支持并行数据操作方式,也是最通用的12864点阵液晶的驱动控制IC。
(3)ST7565,支持中行或并行数据操作方式。
(4)S6B0724,支持中行或并行数据操作方式。
(5)RA6963,支持并行数据操作方式。
2.3、其他点阵数如192×64、240×64、320X64、240X128 的一般都是采用RA6963驱动控制芯片。
2.4、点阵数320X240,通用的采用RA8835 内置ASCII字库,以及RA8806驱动IC内置ASCII和中文等字库。
这里列举的只是一些常用的,当然还有其他LCD 驱动控制IC,在写LCD 驱动时要清楚是哪个型号的IC,再到网上去寻找对应的IC 数据手册吧。
后面我将慢慢补上其它一些常见的。
三、12864 液晶的奥秘CD1601/1602和LCD12864 都是通常使用的液晶,有人以为12864是一个统一的编号,主要是12864 的液晶驱动都是一样的,其实12864只是表示液晶的点阵是128*64点阵,而实际的12864 有带字库的,也有不带字库的:有5V电压的,也有3.3V工作电压:归根到底的区别在于驱动控制芯片,常用的控制芯片有RA8816、KS0108/RA8808、RA6963等等。
三款步进电机驱动芯片的应用
E A L 使能端 E AB E 0 N BE N L = 所有输出为 OE A L = 正常工作 ,N B E I
R S T 上 电复 位 端 EE
S D GN 地 线
输 出 电流 为 1 。 A
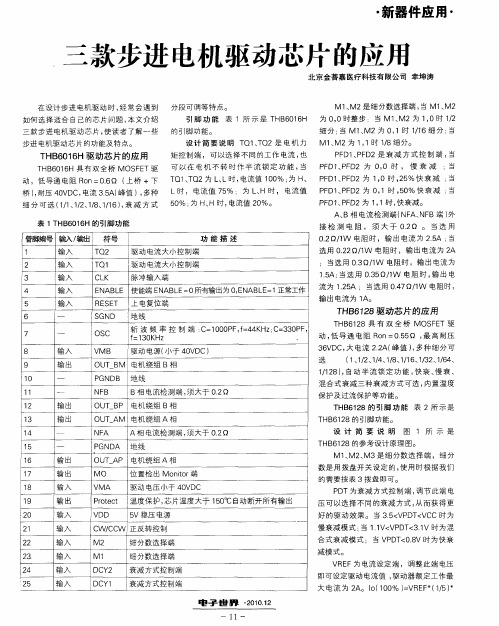
T B 1 8驱 动芯 片的应 用 H 62
T 62 HB 1 8具 有 双 全 桥 M O F T 驱 SE
,
7
8 9 输 入 输 出
OS C
V B M
斩 波 频 率 控 制 端 : = 0 0 F f 4 K zC 3 0 F C 1 0 P ,= 4 H ; = 3 P ,
f 3 KH =1 0 z
动 , 导 通 电 阻 R n=05 Q , 高 耐 压 低 o 5 最 3V 6 DC, 电流 22 峰 值 )多种 细 分 可 大 A( ,
11 8) 自动 半 流 锁 定 功 能 , 衰 、 衰 、 /2 , 快 慢 混合 式衰 减 三 种 衰 减 方 式 可 选 , 置 温 度 内 保 护 及 过 流保 护等 功 能 。
T 62 HB 1 8的 引 脚 功 能 表 2所 示 是 T 62 HB 1 8的 引脚 功 能 。 设 计 简 要 说 明 图 1 所 示 是
M 1 M2是 细 分 数选 择 端 , M 1 M2 、 当 、 为 0, 整 步 ; 当 M 1 M2为 10时 12 0时 、 , /
细 分 : M1 M2为 O 1时 1 当 、 , 门6细 分 ; 当 M1 M2为 1 1时 1 细 分 。 、 , 8 /
T 6 1 H驱 动芯 片的应 用 HB 0 6
O2 1 电 阻 时 ,输 出 电 流 为 25 ; .Q/W A 当 选 用 O2 Q门W 电 阻 时 ,输 出 电流 为 2 .2 A
几种用于IGBT驱动的集成芯片
几种用于IGBT驱动的集成芯片2. 1 TLP250(TOSHIBA公司生产)在一般较低性能的三相电压源逆变器中,各种与电流相关的性能控制,通过检测直流母线上流入逆变桥的直流电流即可,如变频器中的自动转矩补偿、转差率补偿等。
同时,这一检测结果也可以用来完成对逆变单元中IGBT实现过流保护等功能。
因此在这种逆变器中,对IGBT驱动电路的要求相对比较简单,成本也比较低。
这种类型的驱动芯片主要有东芝公司生产的TLP250,夏普公司生产的PC923等等。
这里主要针对TLP250做一介绍。
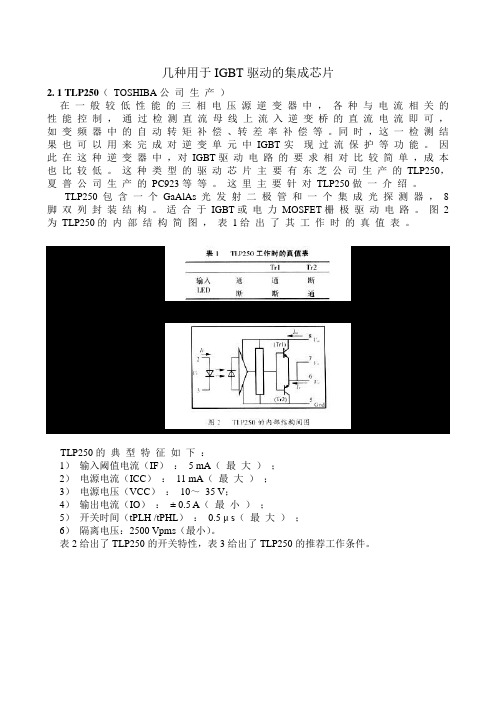
TLP250包含一个GaAlAs光发射二极管和一个集成光探测器,8脚双列封装结构。
适合于IGBT或电力MOSFET栅极驱动电路。
图2为TLP250的内部结构简图,表1给出了其工作时的真值表。
TLP250的典型特征如下:1)输入阈值电流(IF):5 mA(最大);2)电源电流(ICC):11 mA(最大);3)电源电压(VCC):10~35 V;4)输出电流(IO):± 0.5 A(最小);5)开关时间(tPLH /tPHL):0.5 μ s(最大);6)隔离电压:2500 Vpms(最小)。
表2给出了TLP250的开关特性,表3给出了TLP250的推荐工作条件。
注:使用TLP250时应在管脚8和5间连接一个0.1 μ F的陶瓷电容来稳定高增益线性放大器的工作,提供的旁路作用失效会损坏开关性能,电容和光耦之间的引线长度不应超过 1 cm。
图3和图4给出了TLP250的两种典型的应用电路。
在图4中,TR1和TR2的选取与用于IGBT驱动的栅极电阻有直接的关系,例如,电源电压为24V时,TR1和TR2的Icmax≥ 24/Rg。
图5给出了TLP250驱动IGBT时,1 200 V/200 A的IGBT上电流的实验波形(50 A/10 μ s)。
可以看出,由于TLP250不具备过流保护功能,当IGBT过流时,通过控制信号关断IGBT,IGBT中电流的下降很陡,且有一个反向的冲击。
介绍几种电机驱动芯片

介绍几种电机驱动芯片[作者:佚名转贴自:本站原创点击数:1493 更新时间:2005-4-22 文章录入:白桦]减小字体增大字体在自制机器人的时候,选择一个合适的驱动电路也是非常重要的,本文详细介绍了几种常用的机器人驱动芯片。
介绍几种机器人驱动芯片(注:本文已经投稿至《电子制作》)在自制机器人的时候,选择一个合适的驱动电路也是非常重要的。
最初,通常选用的驱动电路是由晶体管控制继电器来改变电机的转向和进退,这种方法目前仍然适用于大功率电机的驱动,但是对于中小功率的电机则极不经济,因为每个继电器要消耗20~100mA的电力。
当然,我们也可以使用组合三极管的方法,但是这种方法制作起来比较麻烦,电路比较复杂,因此,我在此向大家推荐的是采用集成电路的驱动方法:马达专用控制芯片LG9110芯片特点:低静态工作电流;宽电源电压范围:2.5V-12V ;每通道具有800mA 连续电流输出能力;较低的饱和压降;TTL/CMOS 输出电平兼容,可直接连CPU ;输出内置钳位二极管,适用于感性负载;控制和驱动集成于单片IC 之中;具备管脚高压保护功能;工作温度:0 ℃-80 ℃。
描述:LG9110 是为控制和驱动电机设计的两通道推挽式功率放大专用集成电路器件,将分立电路集成在单片IC 之中,使外围器件成本降低,整机可靠性提高。
该芯片有两个TTL/CMOS 兼容电平的输入,具有良好的抗干扰性;两个输出端能直接驱动电机的正反向运动,它具有较大的电流驱动能力,每通道能通过750 ~800mA 的持续电流,峰值电流能力可达1.5 ~2.0A ;同时它具有较低的输出饱和压降;内置的钳位二极管能释放感性负载的反向冲击电流,使它在驱动继电器、直流电机、步进电机或开关功率管的使用上安全可靠。
LG9110 被广泛应用于玩具汽车电机驱动、步进电机驱动和开关功率管等电路上。
管脚定义:1 A 路输出管脚、2和3 电源电压、4 B 路输出管脚、5和8 地线、6 A 路输入管脚、7 B 路输入管脚2、恒压恒流桥式1A驱动芯片L293图2是其内部逻辑框图图3是其与51单片机连接的电路原理图L293是著名的SGS公司的产品,内部包含4通道逻辑驱动电路。
led 驱动芯片刷新倍率

led 驱动芯片刷新倍率【原创版】目录1.LED 驱动芯片的概念与作用2.LED 驱动芯片的刷新倍率3.刷新倍率对 LED 屏幕的影响4.如何选择高刷新倍率的 LED 驱动芯片5.LED 驱动芯片的市场前景正文一、LED 驱动芯片的概念与作用LED 驱动芯片,又称为 LED 驱动器,是指用于驱动 LED 发光二极管工作的芯片。
它的主要作用是将电源供应的电能转换为 LED 发光所需的电能,同时对电流进行调节,以保证 LED 发光的稳定性和可靠性。
二、LED 驱动芯片的刷新倍率LED 驱动芯片的刷新倍率是指其在单位时间内对 LED 屏幕刷新的次数。
一般来说,刷新倍率越高,LED 屏幕显示的画面就越流畅,视觉体验越好。
三、刷新倍率对 LED 屏幕的影响刷新倍率对 LED 屏幕的影响主要体现在以下几个方面:1.流畅度:高刷新倍率能让 LED 屏幕显示的画面更加流畅,减少图像拖影和模糊,提升视觉体验。
2.色彩表现:高刷新倍率能提高 LED 屏幕的色彩表现力,使颜色更加真实、饱满。
3.节能:高刷新倍率意味着更高的电源需求,可能会增加功耗,但同时也可以提高 LED 屏幕的使用寿命。
四、如何选择高刷新倍率的 LED 驱动芯片在选择 LED 驱动芯片时,应关注以下几个方面:1.刷新倍率:选择高刷新倍率的芯片,以提高 LED 屏幕的显示效果。
2.输出电流:根据 LED 屏幕的尺寸和分辨率,选择合适的输出电流。
3.供电电压:与电源电压相匹配,确保 LED 驱动芯片能正常工作。
4.散热性能:高刷新倍率可能导致芯片温度升高,因此要关注芯片的散热性能。
5.稳定性和可靠性:选择具有良好稳定性和可靠性的 LED 驱动芯片,以保证 LED 屏幕的长期稳定运行。
五、LED 驱动芯片的市场前景随着 LED 技术的不断发展,LED 驱动芯片的市场需求将持续增长。
从长远来看,LED 驱动芯片将会迎来供需两旺的繁荣景象。
第1页共1页。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
电机驱动有单极性和双极性两种。
当只需要电机单方向驱动时,可采用单极性驱动,如下图(a)所示,此电路由于续流二极管工作时间较长,损耗大,所以改进后的半桥驱动如下图(b):
Figure 1.Illustration of the half bridge.
当需要电机正反两个方向旋转时,采用双极性驱动方式,如下:
Figure 2.Illustration of the H bridge.
功能逻辑如下:(1:合并,0:断开)
S1 S2 S3 S4 电机动作
1 0 0 1 正传
0 1 1 0 反转
0 0 0 0 自由
0 1 0 1 刹车
1 0 1 0 刹车
这又称为全桥驱动,上图中开关使用大功率MOS管替代,可以使用分立元件,也可以使用集成电路。
但是能用于PWM驱动的低电压大电流芯片产品并不多,在智能车比赛中使用最多的有:MC33886, VNH3SP30, BTS7960B, DT340I, IRF3205。
根据查阅的资料,使用单片MC33886时易发生发热、噪声等问题,对电源电压影响过大等问题,所以可以使用两片并联,如下所示:
该接法降低了MOS管的导通内阻,增大了驱动电流,可以起到增强驱动能力、减小芯片发热的作用,但是起始频率受限,电机噪声大且发热严重。
VNH3SP30是意法半导体公司生产的专用于电机驱动的大电流功率集成芯片。
芯片核心是一个双单片上桥臂驱动器(HSD)和2个下桥臂开关,HSD开关的设计采用ST的ViPowe 技术,允许在一个芯片内集成一个功率场效应MOS管和智能信号/保护电路。
下桥臂开关是采用ST专有的EHD(STripFET)工艺制造的纵向场效应MOS管。
3个模块叠装在一个表面组装MultiPowerSO- 30引脚框架电绝缘封装内,具体性能指标如下: ①最大电流30 A、电源电压高达40 V; ②功率MOS管导通电阻0.034 Ω; ③5 V兼容的逻辑电平控制信号输入;④内含欠压、过压保护电路;⑤芯片过热报警输出和自动关断。
与MC3886相比,它具有一个显著优点就是芯片不会发热,且保护功能强大,但是存在开关频率限10 kHz,电机噪声大且电机容易发热,但芯片较贵,很多场合性价比不高。
采用2个半桥智能功率驱动芯片BTS7960B组合成一个全桥驱动器,驱动直流电机转动。
BTS7960B是应用于电机驱动的大电流半桥集成芯片,它带有一个P沟道的高边MOSFET、一个N沟道的低边MOSFET和一个驱动IC。
P沟道高边开关省去了电荷泵的需求,因而减少了电磁干扰(EMI)。
集成的驱动IC具有逻辑电平输入、电流诊断、斜率调节、死区时间产生和超温、过压、欠压、过流及短路保护功能。
BTS7960B的通态电阻典型值为16 mΩ,驱动电流可达43 A,调节SR引脚外接电阻的大小可以调节MOS
管导通和关断时间,具有防电磁干扰功能。
IS引脚是电流检测输出引脚。
INH引脚为使能引脚,IN引脚用于确定哪个MOSFET导通。
当IN=1 且INH=1时,高边MOSFET 导通,输出高电平;当IN=0且INH=1时,低边MOSFET导通,输出低电平。
通过对下桥臂开关管进行频率为25 kHz的脉宽调制(PWM)信号控制BTS7960B的开关动作,实现对电机的正反向PWM驱动、反接制动、能耗制动等控制状态。
这块芯片开头频率可以达到25 kHz,可以很好地解决前面提到的MC33886和VNH3SP30使电机噪声大和发热的问题,同时驱动能力有了明显的提高,响应速度快。
但是,电机变速时会使电源电压下降10%左右,控制器等其他电路容易产生掉电危险,从而使整个电路系统瘫痪。
在查看往年技术报告时也发现直接使用分立器件设计H桥,但是这会冒很大风险,有可能不稳定。
综上所述,应尽量采用VNH3SP30组合成全桥,也可以使用两片MC33886并联。