第4章 三相感应电动机直接转矩控制
4.7三相感应电动机的功率和转矩

额定转速:
nN (1 S)n1 (1 0.0286) 1500 1457r / min
额定输出转矩:
§4-7 三相感应电动机的功率和转矩
T2 N
PN N
60
2
PN nN
9.55 10000 1457
65.57N m
电磁转矩:
T PM 9.55 PM 67.27N m
§4-7 三相感应电动机的功率和转矩
一、功率平衡方程式
定子绕组从电源吸收的有功功率P1为:
P1 m1U1I1 cos1
其中,扣除定子绕组的铜耗 pCu1 m1I12r1及定子铁心的铁耗
pFe
m1I
2 0
rm
后,为进入转子的电磁功率PM。
§4-7 三相感应电动机的功率和转矩
即, 电磁功率为 : PM P1 pCu1 pFe
PM
m1E2'
I
' 2
c os 2
m1I
' 2
2
r2' S
m1I
' 2
2
r2'
m1I
' 2
2
(1
S
S
r2' )
pCu 2 P
§4-7 三相感应电动机的功率和转矩
I1 r1
p Cu1
X 1
p Fe
U1 P1
E1 E2'
r2'
Im
p Cu2
rm PM
Xm
X
' 2
I2'
pΩ
U2'
1
S S
r2'
PΩ
【补例4-3】一台三相异步电动机,额定数据为:PN=10kW, U1N=380V,定子△接法,四极,50Hz。I1N=20.5A。额定运行 时,定子铜耗pcu1=570W,转子铜耗pcu2=302W,铁耗pFe= 285 W,机械损耗p=70W,附加损耗190W。试计算满载运行时:
直接转矩控制

交流电机的数学模型
交流电机综合矢量的概念
在xy坐标系中,磁链方程与dq坐标系下的方 程完全一样,只不过多了几个约束条件: 定子磁链在x轴上的分量为定子磁链的幅值。 定子磁链在y轴上的分量及其对时间一阶微 分为零。
转矩控制的本质
稳态分量
暂态分量
六边形定子磁链轨迹控制
B βa β
S1
S2 u2 u3 u6
S6
u4 S3
βb u1 u5
α A
S5
βc
Ψs*
ψs
C S4
在忽略定子电阻的情况下,定子磁链矢量端 点的运动方向与所施加的电压矢量方向一 致。若在定子绕组上顺序施加运动电压矢 量u4、u6、u2、u3、u1、u5,定子磁链则会相 应的逆时针运动。
图中磁链六边形的六条边分别用s1~s6表示, 分别称之为区段s1~s6.每个区段上两个运动 的电压矢量(如s1段上的u3、u4)定义为 该区段的区段电压矢量。当区段电压矢量 与区段方向一致时定义为0°电压矢量。 定义坐标原点到六条变的垂直距离为定子磁 链量,用Ψs*表示。
交流电机中常用的坐标及其变换
在分析和改善运行性能的控制策略中需要站在不 同的坐标系中对问题进行分析求解。直接转矩控 制交流电机中常用的坐标系有 两大类: 1 坐标轴线放在定子上的静止坐标系,如ABC和αβ0 坐标系。 2 坐标轴放在转子上随转子一起旋转的坐标系,如 dq0、MT0坐标系。 对于零序分量为零的系统, αβ0、 dq0、MT0简记 为αβ、 dq、MT。
现代电机控制技术

2
现代电机控制技术
第1章 基础知识 第2章 三相感应电动机矢量控制 第3章 三相永磁同步电动机矢量控制 第4章 三相感应电动机直接转矩控制 第5章 三相永磁同步电动机直接转矩控制 第6章 无速度传感器控制与智能控制
3
第1章 基础知识
1.1 电磁转矩 1.2 直、交流电机电磁转矩 1.3 空间矢量 1.4 矢量控制
9
0
1
2
3
4
5
6
7
8
9
a) 三相绕组由逆变器供电
b) 电子开关VT1、VT2、VT6闭合时的电路
图1-29 定子电压矢量 c) 电压矢量us1的构成
0
1
2
a) 正弦分布磁动势波
b) 正弦分布磁场
图1-30 A相绕组产生的正弦分布磁场
3
4
5
6
7
8
9
0
1
2
4
1.1 电磁转矩
1.1.1 磁场与磁能 1.1.2 机电能量转换 1.1.3 电磁转矩生成 1.1.4 电磁转矩控制
5
图1-1 双线圈励磁的铁心
6
7
磁压降
磁压降
磁路的 磁动势
8
9
铁心磁路 主磁通
铁心磁 路磁阻
气隙 磁通
气隙磁 路磁阻
0
1
2
3
4
5
6
7
8
9
0
1
2
3
7
8
9
0
1
2
3
4
5
6
7
8
9
0
1
2
3
4
5
三相异步电动机直接转矩控制(DTC)系统仿真
1 直接转矩控制简介直接转矩控制(Direct Torque Control——DTC),国外的原文有的也称为Direct self-control——DSC,直译为直接自控制,这种“直接自控制”的思想以转矩为中心来进行综合控制,不仅控制转矩,也用于磁链量的控制和磁链自控制。
直接转矩控制与矢量控制的区别是,它不是通过控制电流、磁链等量间接控制转矩,而是把转矩直接作为被控量控制,其实质是用空间矢量的分析方法,以定子磁场定向方式,对定子磁链和电磁转矩进行直接控制的。
这种方法不需要复杂的坐标变换,而是直接在电机定子坐标上计算磁链的模和转矩的大小,并通过磁链和转矩的直接跟踪实现PWM脉宽调制和系统的高动态性能。
直接转矩控制系统的主要特点有:(1)直接转矩控制是直接在定子坐标系下分析交流电动机的数学模型,控制电动机的磁链和转矩。
(2)直接转矩控制的磁场定向采用的是定子磁链轴,只要知道定子电阻就可以把它观测出来。
(3)直接转矩控制采用空间矢量的概念来分析三相交流电动机的数学模型和控制各物理量,使问题变得简单明了。
(4)直接转矩控制强调的是转矩的直接控制效果。
直接转矩控制技术用空间矢量的分析方法,直接在定子坐标系下计算与控制电动机的转矩,采用定子磁场定向,借助于离散的两点式调节(Band-Band)产生PWM 波信号,直接对逆变器的开关状态进行最佳控制,以获得转矩的高动态性能。
它省去了复杂的矢量变换与电动机的数学模型简化处理,没有通常的PWM 信号发生器。
它的控制思想新颖,控制结构简单,控制手段直接,信号处理的物理概念明确。
2 直接转矩控制的理论基础2.1直接转矩控制的原理ψ的正负符号和电磁直接转矩控制系统的基本思想是根据定子磁链幅值偏差ΔSψ所在位置,直接选取合适的转矩偏差ΔTe的正负符号,再依据当前定子磁链矢量S电压空间矢量,减小定子磁链幅值的偏差和电磁转矩的偏差,实现电磁转矩和定子磁链的控制。
直接转矩控制是为电压源型PWM逆变器传动系统提出的一种先进的转矩控制技术,基于该技术的传动系统性能可与矢量控制的异步电动机传动系统性能相媲美。
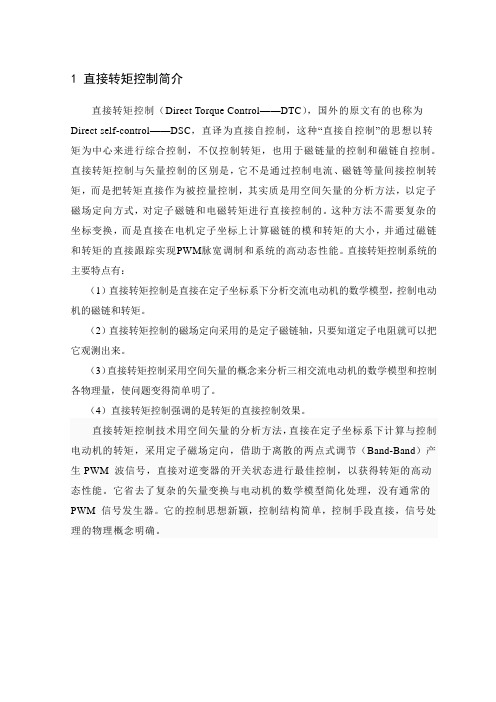
直接转矩控制的原理框图
直接转矩控制的原理框图
直接转矩控制的工作过程为:
被测信号有两个,即Us、和Is。
这两个信号由异步电动机数学模型处理后得到ѱα,ѱβ和转矩实际值界T f。
,ѱα,ѱβ通过坐标变换器
后得到磁链的三个分量信号ѱ
βa,ѱβb和ѱβc。
再由磁链自控制单元得到磁链开关信a,Sѱb和c
确的区段,即确定磁链区域θ。
T f与转矩给定值T g经转矩调节器处理后得到转矩开关信号TQ。
转矩调节器的容差宽度由εf调节。
磁链给定值ѱg和磁链反馈值ѱf由磁链幅值构成综合产生磁链量开关信号ѱQ,ѱf由磁链幅值构成根据ѱβa,ѱβb和ѱβc计算得到,开关信号选择单元综合四个输入信号:磁链开关信号,转矩开关信号,磁链量开关信号和零状态开关信号,产生正确的电压开关信号a b, SU c。
直接转矩控制的原理

直接转矩控制的原理嘿,朋友们!今天咱来唠唠直接转矩控制的原理。
你说这直接转矩控制啊,就好像是一位特别有个性的司机在开车。
他呀,不怎么在意那些复杂的路线规划啥的,就凭着自己的感觉和判断,直接去控制车子的速度和方向。
想象一下,电机就好比是那辆车,而直接转矩控制就是这位司机。
它不去管那些中间的弯弯绕绕,而是直接盯着电机的转矩,说:“嘿,转矩你得这么变!”然后就快速地做出反应,让电机按照它想要的方式运行。
它可不像有些方法那样,犹犹豫豫,思前想后。
它就是这么干脆利落,说干就干!比如说,它觉得转矩小了,立马就加大力度;觉得转矩大了,就赶紧调整。
就好像你开车的时候,觉得速度慢了就猛踩油门,速度快了就踩刹车一样。
这直接转矩控制啊,还有个厉害的地方,就是它反应特别快。
就跟武林高手似的,敌人一招过来,瞬间就能回击。
电机运行中出现啥变化,它能第一时间察觉到,然后迅速采取行动。
而且啊,它适应性还特别强。
不管是在平坦的大道上,还是在崎岖的小路上,它都能把车开得稳稳当当。
无论是啥样的工作环境,它都能很好地发挥作用,让电机乖乖听话。
你说这直接转矩控制是不是很神奇?它就这么直截了当地去控制,没有那么多啰嗦的步骤和计算,却能把电机管理得服服帖帖。
这可真是个了不起的技术啊!咱再想想,要是没有这直接转矩控制,那电机运行起来得多费劲啊!可能就像没头苍蝇一样,不知道该往哪儿走,转矩也不知道该怎么变。
但有了它,一切都变得井井有条,电机能高效地工作,为我们的生活带来便利。
所以啊,直接转矩控制可真是电机控制领域的一把好手,是让电机乖乖听话的妙招!咱可得好好感谢那些发明和研究它的人,让我们能享受到这么厉害的技术带来的好处呀!。
现代电机控制技术 第4章 三相感应电动机直接转矩控制
因为励磁支路 CD 的等效励磁电感 L2m Lr 数值较大,可以认为 iM 是近乎不变的,
即可认为| ψr |是近乎不变的。
8
现代电机控制技术 第4章 三相感应电动机直接转矩控制
由式(4-2)和式(4-3),可得
ir
1
Lr
ψ r
Lm Lr
ψs
将式(4-9)代入转子电压矢量方程(2-40),有
现代电机控制技术
第4章 三相感应电动机 直接转矩控制
现代电机控制技术 第4章 三相感应电动机直接转矩控制
第 4 章 三相感应电动机直接转矩控制
4.1 控制原理与控制方式 4.2 控制系统 4.3 空间矢量调制 4.4 直接转矩控制与矢量控制的联系和比较 4.5 直接转矩控制仿真举例
2
现代电机控制技术 第4章 三相感应电动机直接转矩控制
直接转矩控制与矢量控制不同,它是直接将定子磁链和转矩作为控 制变量,无需进行磁场定向、矢量变换和电流控制,因此更为简捷和快 速,进一步提高了系统的动态响应能力。
本章分析了直接转矩控制的基本原理,对直接转矩控制和矢量控制 进行了比较性分析,对直接转矩控制尚存在的技术问题做了简要说明。
3
三相异步电机直接转矩控制研究

毕 业 设 计2013 年 5 月 15日设计题目 三相异步电机直接转矩控制研究 学生姓名 学 号 20092252 专业班级 电气工程及其自动化09级—2班 指导教师 院系名称 电气与自动化工程学院目录中文摘要: (1)关键词: (1)Abstract: (2)Keywords: (3)1 绪论 (4)1.1 课题研究的背景、目的及其意义 (4)1.2 直接转矩控制算法的国内外研究现状 (6)2 直接转矩控制的理论基础 (6)2.1 三相异步电机的数学模型 (6)2.1.1三相异步电机的数学模型 (6)2.1.2电压空间矢量对定子磁链的影响 (8)2.1.3电压空间矢量对电机转矩的影响 (9)2.2 逆变器以及基本空间矢量的概念和原理 (10)3. 直接转矩控制的控制原理 (12)3.1定子磁链矢量空间位置检测 (13)3.2 定子磁链、转矩和扇区的计算 (14)3.2.1定子磁链估计 (14)3.2.2 电磁转矩估计 (18)3.3 定子磁链和电磁转矩的控制 (18)3.4磁链调节和转矩调节 (20)3.5 起动问题 (21)3.6 直接转矩控制与传统的矢量控制比较 (21)3.6.1 直接转矩控制的特点 (22)3.6.2 DTC与矢量控制的比较 (22)3.7 本章小结 (23)4. 直接转矩控制系统的仿真和性能分析 (23)4.1 关于MATLAB软件 (23)4.2 MATLAB软件简介 (24)4.3 直接转矩控制系统的Matlab/Simulink仿真 (24)4.4 直接转矩控制系统的性能优缺点分析 (26)4.5本章小结 (27)结论 (28)谢辞 (30)[参考文献] (31)三相异步电机直接转矩控制研究中文摘要:对于三相异步电机来说,直接转矩控制(DTC)是一种高性能的变频调速控制方案。
三相异步电机的直接转矩控制技术是继矢量控制技术之后发展起来的一种新型、高性能变频调速技术。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
14
现代电机控制技术
第4章 三相感应电动机直接转矩控制
图 4-9
t e 与转速 ωr 关系
15
现代电机控制技术
第4章 三相感应电动机直接转矩控制
Lm Lr
图中,以转子磁链矢量 ψ r 为参考坐标, jωr
ψ r 超前 ψ r 90° 电角度,
以矢量 OM 表示。PQ 是通过 M 点与定子磁链矢量 ψ s 平行的斜线。当感应 电压矢量 υ 落在斜线 PQ 上时,ψ s υ jωr m ψ r 0 , 电磁转矩增量应为 Lr 零;当 υ 处于 PQ 斜线上方时, t e 0 ;当 υ 处于 PQ 下方时, t e 0 。电 机转速 ωr 不同,斜线 PQ 会上下浮动,对于同一感应电压矢量 υ ,将会产 生不同的转矩增量 t e 。图 4-9 中,随着 ωr 变小, t e 将逐渐增大。这说明, 在低速区,外加电压矢量的控制作用明显,转矩增幅加大。在高速区,随 着 ωr 增大,外加电压矢量的控制作用逐渐减弱,当 jωr 外加电压矢量对转矩的控制作用就消失了。
ψ s Ls i s Lm i r ψ r Lm i s Lr i r
(4-2) (4-3)
3
现代电机控制技术
第4章 三相感应电动机直接转矩控制
4.1.2 定子电压矢量作用与定子磁链轨迹变化
在定子三相轴系中,定子电压矢量方程为
u s Rs i s dψ s dt
(4-11)
若忽略定子电阻的影响, 则有
us dψ s dt
(4-12)
可近似地表示为
ψ s us t
(4-13)
由以上分析可知, 定子磁 链矢量 ψ s 和定子电压矢量 us 间具有积分和微分关系。 us 在
图 4-3 定子电压矢量作用与定子磁链矢量轨迹变化
作用的很短时间内,矢量 ψ s 的增量 ψ s 等于 us 和 t 的乘积, ψ s 的方向与外加电压矢量 us 的方向相同,即 如图 4-3 所示, ψ s 轨迹变化的方向与 us 同向,轨迹的变化速率等于 us 。
8
现代电机控制技术
第4章 三相感应电动机直接转矩控制
图4-8 直接转矩控制系统原理框图
9
现代电机控制技术
3.磁链偏差
第4章 三相感应电动机直接转矩控制
在图 4-6 中,定子磁链矢量的变化可表示为
ψ s us k t k 1,2, ,6
(4-19)
例如,当 ψ s 位于扇区①时,可选择 us 2 、 us 6 、 us 3 和 us 5 中的一个来改变 ψ s 的 幅值。 ψ s 在扇区①内,其幅值可能的变化范围为
t e pψ s i s pψ s 1 Ls
υ - e t
(4-29)
当滞环控制采用数字化方式时,若逆变器开关导通时间为 t s ,则转矩变化量为
t e
s
pψ s
1 Ls
υ - e t s
(4-30)
若滞环比较器带宽小于这个值, 滞环控制就不能像所期望的那样将转矩脉动幅值限 制在带宽内。同理,因采用时间延迟,也会使转矩幅值的变化范围超过带宽,即有
ψ s Vc 2 2 3 V c cos
6
k
t
(4-20)
t
在以数字化形式实现的直接转矩控制中,逆变器的开关频率通常是固定 的,若逆变器开关导通时间为 t s ,则 ψ s 幅值变化的最大幅度为
ψ s Vc 2 t s
s
(4-21)
如果滞环比较器带宽小于这个值, 滞环控制就不能很好限制磁链幅值的脉动。
5
现代电机控制技术
第4章 三相感应电动机直接转矩控制
1.滞环比较器
为使实际 ψ s 的运行轨迹能沿圆形轨迹变化,应设定指令 ψ s 的幅值
ψ s 为常值。与矢量控制中对定子电流控制一样,也可采用滞环比较控制
*
*
方式,始终将 ψ s 与 ψ s 的幅值偏差 ψ s 控制在滞环的上下带宽内。如图
*
由式(4-11),若忽略定子电阻影响,则有
dψ s dt υ us
(4-25)
式中,υ 是因定子磁链矢量变化产生的, 定义为感应电压矢量 υ , 当不计定子电阻影 响时,与外加电压矢量 us 相平衡。同理,有
L m dψ r Lr
Lm dψ r Lr dt
e
(4-26)
dt
是因转子磁链矢量变化产生的,定义为感应电压矢量 e。
第4章 三相感应电动机直接转矩控制
4.1 控制原理与控制方式
4 .1 .1 基 本 原 理 4 .1 .2 定 子 电 压 矢 量 作 用 与 定 子 磁 链 轨 迹 变 化
4.1.1 基本原理
由矢量控制方程(1-164)已知,电磁转矩可表示为
t e pψ s i s
(4-1)
式中, ψ s 是定子磁链矢量, i s 是定子电流矢量,两者都是以定子三相轴系 表示的空间矢量。 在定子三相轴系中,定子磁链和转子磁链矢量可表示为
11
现代电机控制技术
4.转矩偏差
由式(4-7),可得
第4章 三相感应电动机直接转矩控制
is
L 1 ψs m ψ r Ls Lr L dψ r 1 dψ s m Ls dt Lr dt
(4-23)
则有
di s dt
(4-24)
ψ s Ls i s
dψ r dt
Lm Lr
ψr
(4-43)
L Lm 1 ψ s s ψ r jω r ψ r Ls Tr Lm
6
现代电机控制技术
第4章 三相感应电动机直接转矩控制
图 4-6 滞环比较控制
7
现代电机控制技术
第4章 三相感应电动机直接转矩控制
2.控制系统构成
图 4-8 是直接转矩控制系统原理框图。图中,电压源逆变器能提供八个开关电 压矢量。将定子磁链实际值与给定值比较后的差值输入磁链滞环比较器,同时将转 矩实际值与给定值比较后的差值输入转矩滞环比较器,根据两个滞环比较器的输 出,通过查询表 4-1,可以选择到合适的开关电压矢量。但是在查询前,需要提供 定子磁链矢量的位置信息,图中的 S ψ 表示的是扇区顺序号。 根据定子三相电压和电流的检测值可估计出定子磁链矢量的幅值和相位,同时 给出转矩值。 图 4-8 中,仅给出了速度控制环节,也可在此基础上构成位置控制系统。作为 速度控制系统,还可以进行弱磁控制。 滞环控制属于 Bang-Bang 控制,滞环控制器相当于两点式调节器,也可看成是 具有高增益的 P 调节器,虽然能使磁链和转矩快速调节,但是磁链和转矩不可避免 地会产生脉动。若使脉动减小,可以减小滞环比较器带宽,但会增大逆变器的开关 频率和开关损耗,降低了运行效率,也提高了对电子开关的技术要求。
12
现代电机控制技术
第4章 三相感应电动机直接转矩控制
i s 1 Ls
于是,可将式(4-24)近似为
υ e t
(4-27)
根据式(4-1),可将电磁转矩在 t 时间内的增量表示为
t e p ( ψ s i s ψ s i s )
(4-28)
若忽略 t 时间内 ψ s 变化的影响,转矩增量仅因 is 引起,则可将式(4-28)近似为
e jωr Lm Lr ψr
(4-32)
将式(4-32)代入式(4-29),可得
t e pψ s i s pψ s L 1 υ jω r m ψ r t Ls Lr
(4-33)
式(4-33)表明,电磁转矩的变化会受电动机转速的影响。 可以用图 4-9 来表示式(4-33)中的矢量关系。
4-6 所示,滞环的总带宽为 2 ψ s ,其上限值为 ψ s ψ s ,下限值为
*
ψ s ψ s 。将空间复平面分成六个扇形区间,每个区间的范围是以定子
*
开关电压矢量为中线,各向前、后扩展 30° 电角度,扇区的跨度是 60° 电 角度,扇区的序号 k = ①,②,…,⑥,与开关电压矢量的序号相同, 例如扇区①就是 us1 所在的区间。 之所以将 ABC 平面分成六个区间, 是因 为这样能便于对开关电压矢量的合理选择。
ψD ψQ
(u
D
Rs i D ) dt Rs iQ ) dt
(4-35) (4-36)
18
(u
Q
式中, u D 、 u Q 和 iD 、 iQ 由 ABC 轴系到 DQ 轴系的坐标变换而得。
现代电机控制技术
2)电流-速度模型
第4章 三相感应电动机直接转矩控制
由式(4-7)和(4-10),已知
4
现代电机控制技术
4.2 控制系统
4.2.1 滞环比较控制
第4章 三相感应电动机直接转矩控制
4.2.2 定子磁链和转矩估计
4.2.1 滞环比较控制
如式(4-5)所示,为控制电磁转矩,必须同时控制定子磁链矢量幅值 ψ s 和 负载角 sr 。若依赖于同一电压矢量来完成,如图 4-3 所示,两项控制之间必然 存在ቤተ መጻሕፍቲ ባይዱ合。 而且电磁转矩与负载角 sr 具有非线性关系, 因此确定直接转矩控制 的控制规律是件困难的事。 目前已提出了多种控制方式,其中最基本的控制方式采用的是滞环比较控 制,又称为“Bang-Bang”控制,这种控制方式也常被用于具有耦合的非线性 控制系统。 滞环控制利用两个滞环比较器, 分别控制定子磁链幅值和电磁转矩, 但只能将磁链幅值和转矩偏差限制在一定的容差之内,而不能消除磁链和转矩 闭环控制的输入误差。
16
L
Lm Lr
ψ r 达到 M 点时,