直接转矩控制系统与仿真
直接转矩控制基本原理和仿真研究报告

直接转矩控制的基本原理和仿真研究摘要:直接转矩控制技术是继矢量控制技术之后,在交流传动领域内发展迅速的一种高性能调速技术,该控制方法以其思路新颖、结构简单及性能良好等优点引起了广泛关注和研究。
与矢量控制技术不同,直接转矩控制技术采用定子磁场定向,直接将磁通和电磁转矩作为控制量,对电磁转矩的控制更加简捷快速,提高了系统的动态响应能力。
由于直接转矩控制技术本身的固有优势,使直接转矩控制的理论研究和技术开发越来越受到重视,进展的步伐也越来越快。
本文将直接转矩控制技术应用于异步电机中,从异步电机的数学模型出发,介绍了直接转矩控制技术的基本理论。
在深入剖析原理的基础上将直接转矩算法模块化,在Simulink环境下建立了异步电机直接转矩近似圆形磁链控制系统仿真模型。
仿真结果表明,直接转矩控制技术动态响应能力快,控制方法直接,但是低速性能较差,低速状态下存在转矩脉动过大,定子电流畸变严重等缺点。
关键字:直接转矩控制,异步电机,simulinkThe Basic Principle and Simulation Study of DirectTorque ControlKong Fei,Ye Zhen,Shao Zhuyu<Jiangnan University, Wuxi, Jiangsu, 214000, P. R. China)Abstract:Direct Torque Control (DTC> technology is a high-speed technology in the field of AC drive following the technique of vector control and it has rapid development in recent years.This control strategy attracts wide attention and research for its novel idea, simple structure and good performance. Differ from the vector control technologies, DTC technology uses the stator flux orientation and directly makes the flux and electromagnetic torque as the control volume, therefore the control of the electromagnetic torque is simple and fast, the system dynamic response capability is improved. Due to the inherent advantages of DTC technology, its theoretical research and technological development is receiving increasing attention, also the pace of progress faster and faster.In this article, we make direct torque control techniques applied to asynchronous motors. From a mathematical model of induction motor starting, introduced the basic theory of DTC technology. Based on depth analysis of the basis and principles, we module the DTC algorithm. In the Simulink environment, the asynchronous motor direct torque control system of quasi-circular flux simulation model is established. Simulation results show that the DTC technologies has fast dynamic response capability and directly control method, but the low-speed performance is poor, such as torque ripple is too large in low speed state and the stator current distortion is serious.Key words:direct torque control (DTC>,asynchronous motor,simulink1前言直接转矩控制技术作为一种新颖的电机控制策略,基本思想就是直接将电磁转矩作为被控制量,与矢量控制相比,无需进行复杂的坐标变换,对电机的控制更加快捷迅速,控制系统的动态响应能力得到进一步提高。
三相异步电动机直接转矩控制系统仿真报告
三相异步电动机直接转矩控制系统仿真报告摘要:利用直接转矩控制( DTC )理论,研究异步电动机直接转矩控制调速系统的基本组成和工作原理,建立了异步电动机直接转矩控制系统的仿真模型。
利用MATLAB /Simulink软件对异步电动机直接转矩控制系统进行建模和仿真。
结果表明: DTC系统具有动态响应速度快、精度高、易于实现的优点。
仿真结果验证了该模型的正确性和该控制系统的有效性。
关键词:异步电机;直接转矩控制; MATLAB仿真1 引言自从20世纪70年代矢量控制技术发展以来,交流拖动技术就从理论上解决了交流调速系统在静动态性能上与直流调速系统相媲美的问题。
所谓矢量控制,就是将交流电动机模拟成直流电动机来控制,通过坐标变换实现电机定子电流的励磁分量和转矩分量的解耦,然后分别独立控制,从而获得高性能的转矩和转速响应特性。
直接转矩控制(Direct Torque Control DTC)是在矢量控制基础之上发展起来的,是继矢量控制以后提出的又一种异步电动机控制方法。
其思路是把异步电动机和逆变器看成是一个整体,采用电压矢量分析方法直接在静止坐标系下分析和计算电动机的转矩和磁链,通过磁链跟踪得出PWM 逆变器的开关状态切换的依据从而直接控制电动机转矩"与矢量控制相比,直接转矩控制的主要优点是:在定子坐标系下对电动机进行控制,摒弃了矢量控制中的解藕思想,直接控制电动机的磁链和转矩,并用定子磁链的定向代替转子磁链的定向,避开了电动机中不易确定的参数(转子电阻)"由于定子磁链的估算只与相对比较容易测量的定子电阻有关,所以使得磁链的估算更容易、更精确,受电动机参数变化的影响也更小"此外,直接转矩控制通过直接输出转矩和磁链的偏差来确定电压矢量,与以往的调速方法相比,它具有控制直接!计算过程简化的优点"因此,直接转矩控制一问世便受到广泛关注,目前国内外围绕直接转矩控制的研究十分活跃。
三相异步电动机直接转矩控制(DTC)系统仿真
1 直接转矩控制简介直接转矩控制(Direct Torque Control——DTC),国外的原文有的也称为Direct self-control——DSC,直译为直接自控制,这种“直接自控制”的思想以转矩为中心来进行综合控制,不仅控制转矩,也用于磁链量的控制和磁链自控制。
直接转矩控制与矢量控制的区别是,它不是通过控制电流、磁链等量间接控制转矩,而是把转矩直接作为被控量控制,其实质是用空间矢量的分析方法,以定子磁场定向方式,对定子磁链和电磁转矩进行直接控制的。
这种方法不需要复杂的坐标变换,而是直接在电机定子坐标上计算磁链的模和转矩的大小,并通过磁链和转矩的直接跟踪实现PWM脉宽调制和系统的高动态性能。
直接转矩控制系统的主要特点有:(1)直接转矩控制是直接在定子坐标系下分析交流电动机的数学模型,控制电动机的磁链和转矩。
(2)直接转矩控制的磁场定向采用的是定子磁链轴,只要知道定子电阻就可以把它观测出来。
(3)直接转矩控制采用空间矢量的概念来分析三相交流电动机的数学模型和控制各物理量,使问题变得简单明了。
(4)直接转矩控制强调的是转矩的直接控制效果。
直接转矩控制技术用空间矢量的分析方法,直接在定子坐标系下计算与控制电动机的转矩,采用定子磁场定向,借助于离散的两点式调节(Band-Band)产生PWM 波信号,直接对逆变器的开关状态进行最佳控制,以获得转矩的高动态性能。
它省去了复杂的矢量变换与电动机的数学模型简化处理,没有通常的PWM 信号发生器。
它的控制思想新颖,控制结构简单,控制手段直接,信号处理的物理概念明确。
2 直接转矩控制的理论基础2.1直接转矩控制的原理ψ的正负符号和电磁直接转矩控制系统的基本思想是根据定子磁链幅值偏差ΔSψ所在位置,直接选取合适的转矩偏差ΔTe的正负符号,再依据当前定子磁链矢量S电压空间矢量,减小定子磁链幅值的偏差和电磁转矩的偏差,实现电磁转矩和定子磁链的控制。
直接转矩控制是为电压源型PWM逆变器传动系统提出的一种先进的转矩控制技术,基于该技术的传动系统性能可与矢量控制的异步电动机传动系统性能相媲美。
15-基于Matlab_Simulink的直接转矩控制系统仿真研究
(7)
3.2.2 磁链与转矩滞环调节模块
磁链允许容差通过定义施密特触发器的上下触 发点来设置,输出 sf (0 或 1)即磁链滞环调节器的输 出状态量。图 4 所示为定子磁链滞环调节模块。
如图5所示为转矩滞环调节子系统,其中ωr、ωr* 分别为观测所得转速和给定转速参考值,将其 PI 调 节后得到给定转矩和实际转矩。转矩滞环调节的输 出状态量 ST 有两种状态值,分别为 1 和 0,将 PI 调 节得到的给定转矩和实际转矩的差值与容差逻辑比 较,即可得到 ST 的值,在查电压矢量最优开关表时
从图 6 圆形磁链轨迹可明显看到电压矢量在
图 7 相电流波 图 8 电磁转矩曲线
图 6 圆形磁链轨迹
图 9 电机转速曲线 【下转第 172 页】
第 32 卷 第 1 期 2010-1 【109】
西门子重磅出击亚洲版 SPS —— SIAF GUANGZHOU
SIAF GUANGZHOU 中国广州国际工业自动 化技术及装备展览会,是全球最大自动化展—— “SPS/IPC/DRIVES 电气自动化展”与华南著名工 控展——“CHIFA 中国(广州)国际工业控制自动 化及仪器仪表展”在中国的完美结合,2010 年 3 月 8~11 日在广州琶洲展馆举办。经过资源整合,展会 将借鉴 SPS 成功办展经验和营销模式投入运行。
直接转矩控制与矢量控制的区别是,它不是通 过控制电流、磁链等变量间接控制转矩,而是用空 间矢量的分析方法,以定子磁场定向方式,对定子 磁链和电磁转矩进行直接控制[3]。该技术采用 Bang - Bang 控制从而可得到快速的转矩响应,并且由于 控制性能不受转子参数影响,所以可提高系统鲁棒 性,省去了旋转变换和电流控制,则可简化控制器 的结构。
基于交流电动机动态模型的直接转矩控制系统的仿真与设计

运动控制课程设计班级:电气三班学号:姓名:基于交流电动机动态模型的直接转矩控制系统的仿真与设计设计目的应用所学的交、直流调速系统的基本知识与工程设计方法,结合生产实际,确定系统的性能指标与实现方案,进行运动控制系统的初步设计。
应用计算机仿真技术,通过在MATLAB软件上建立运动控制系统的数学模型,对控制系统进行性能仿真研究,掌握系统参数对系统性能的影响。
在原理设计与仿真研究的基础上,应用PROTEL进行控制系统的印制板的设计,为毕业设计的综合运用奠定坚实的基础。
1直接转矩控制的基本原理及规律直接转矩控制系统简称DTC(Direct Torque Control)系统,是继矢量控制系统之后发展起来的另外一种高动态性能的交流电动机变压变频调速系统。
在它的转速环里面利用转矩反馈直接控制电机的电磁转矩,因此而得名为直接转矩控制。
1.1直接转矩控制系统原理与特点如图1-1为直接转矩控制的原理框图,和VC系统一样,它也是分别控制异步电动机的转速和磁链,转速调节器ASR的输出作为电磁转矩的给定信号*T,T后面设置转矩控制内环,它可以抑制磁链变化对于转矩的影响,从而使得在*转速和磁链系统实现解耦。
因此,从整体控制结构上来看,直接转矩控制(DTC)系统和矢量控制系统(VC)系统是一致的都获得了较高质量的动态性能以及静态性能。
图1-1直接转矩控制系统图的幅值从图中中可以看出,直接转矩控制系统,就是通过使定转子磁链s保持恒定,然后选择合理的零矢量的作用次序和作用时宽,以调节定子磁链矢量的运动速度,从而改变磁通角的大小,以实现对电机转矩的控制。
在直接转矩控制技术中,其基本控制方法就是通过电压空间矢量来控制定子磁链的旋转速度,控制定子磁链走走停停,以改变定子磁链的平均旋转速度的大小,从而改变磁通角的大小,以达到控制电动机转矩的目的。
从以上介绍我们可以了解到DTC系统在具体控制方法上的一些特点:⑴转矩和磁链的控制采用双位式控制器,并在PWM的逆变器中直接用这两个控制信号产生电压的SVPWM波形,从而避开了将定子电流分解成转矩和磁链分量,省去了旋转变换和电流控制,简化了控制器的姐结构。
基于svpwm的异步电机直接转矩控制原理及仿真-大学论文
毕业论文Array二○一四年六月基于SVPWM的异步电机直接转矩控制原理及仿真专业班级:电气工程及其自动化1班姓名:指导教师:轮机工程学院摘要本文首先论述了交流调速系统的发展与现状,简要回顾了电力电子器件、直接转矩控制技术、空间矢量脉宽调制技术的发展历程。
接着,系统地论述了直接转矩控制系统的原理,直接转矩控制技术是继矢量控制技术后发展的有一种高性能交流调速技术,它采用空间矢量的分析方式,在两相静止坐标系下计算并控制电机的电磁转矩和磁链。
不过,直接转矩控制技术作为一种较新颖的技术,自然存在着不少的问题,比如电流与转矩的脉动问题等。
本论文针对传统直接转矩控制系统所固有的问题,提出了基于空间矢量调制技术的直接转矩控制策略。
这种新型控制策略将两者的优点结合起来,把电动机和PWM逆变器看成一体,使电动机获得幅值恒定的近似圆形的磁场,以解决其转矩、电流脉动问题。
在论文的撰写阶段,本人做了如下的工作:通过理论分析,建立了两相静止坐标系下的异步电机数学模型,设计转矩和磁链观测模块,设计坐标变换模块,设计SVPWM生成模块。
最后使用Simulink进行仿真,根据原理,搭建出各个模块的仿真图,仿真实验结果表明,此种控制策略可以减少电磁转矩以及电流的脉动,大大提高直接转矩控制系统的控制性能。
关键词:异步电动机;直接转矩;空间矢量脉宽调制;MATLABABSTRACTFirstly, this thesis discusses the current situation and development of the alternating current governor system. And briefly retrospect the development history of power electronic devices, direct torque control system, and space vector pulse width modulation. Then systematically discuss the theory of direct torque control. It’s an alternating current governor technology with high performance developed after vector control technology, which adopts the analysis method of space vector to calculate and control the electromagnetic torque and flux linkage of motor in the two-phase static coordinate. However, naturally, there are some problems, such as the pulsation problem of current and electromagnetic torque in direct torque control technology for it is a rather novel technology. This thesis puts forward a control policy of direct torque control system based on space vector PWM aiming at the inherent problems of traditional direct torque control system.This new control policy combines two technologies together seeing the electromotor and PWM inverter as a whole to make a circular magnetic field with a constant amplitude to solve the pulsation problem of current and electromagnetic torque. In the period of writing this thesis, I have done the work as follows: Through the theory analysis, build the mathematical model of asynchronous motor in the two-phase static coordinate, and design the observation modules of torque and flux linkage, the coordinate transformation modules, and SVPWM generating modules.Lastly, I use Simulink to simulate them, building every simulation diagram according to the theory. And the result indicates that this control policy can promote the control performance of direct torque control system greatly through reducing the pulsation of torque and current.Keywords:Asynchronous motor,Direct torque control,Space vector pulse width modulation,MATLAB目录第1章绪论 (1)1.1 交流调速系统的发展与现状 (1)1.1.1 交流调速系统的硬件发展 (1)1.1.2 交流调速系统控制方法的发展 (1)1.2 直接转矩控制技术的发展与现状 (2)1.3 空间电压矢量调制技术(即SVPWM)的发展以及现状 (3)1.4 本章小结 (4)第2章异步电动机的数学模型 (5)2.1 三相静止坐标系下的异步电机数学模型 (5)2.2坐标变换 (6)2.2.1 三相—两相静止坐标变换 (6)2.2.2 两相—两相旋转坐标变换 (7)2.3 交流异步电动机在静止两相坐标系下的动态数学模型: (8)2.4 本章小结 (9)第3章直接转矩控制系统原理 (10)3.1直接转矩控制系统结构框图 (10)3.2 磁链控制闭环与转矩控制闭环 (10)3.2.1 磁链控制闭环 (10)3.2.2 转矩控制闭环 (13)3.3 逆变器 (14)3.4电压空间矢量选择 (15)3.5扇区判断 (16)3.6本章小结 (17)第4章空间矢量脉宽调制技术 (18)4.1 空间矢量脉宽调制原理 (18)4.2 期望电压空间矢量的获得 (21)4.3 SVPWM调制算法 (22)4.4 本章小结 (22)第5章基于SVPWM异步电机直接转矩控制系统 (23)5.1 基于SVPWM 直接转矩控制系统 (23)5.2磁链定向方式 (23)5.3 DTC-SVM的扇区判断 (24)5.4空间电压矢量调制 (26)5.5 本章小结 (28)第6章DTC-SVM仿真研究 (29)6.1 MATLAB/Simulink的简介 (29)6.2 基本仿真模块 (29)6.3 坐标变换仿真模块 (29)6.3.1三相—两相静止坐标仿真模块 (30)6.3.2 旋转坐标变换仿真模块 (30)6.4 转矩观测仿真模块 (30)6.5 磁链观测仿真模块图 (31)6.6 SVPWM仿真模块 (31)6.6.1 SVPWM模块仿真图 (32)6.6.2扇区判断仿真模块 (32)6.6.3基本电压空间矢量工作时间计算仿真模块 (32)6.6.4逆变器导通时刻计算 (34)6.6.5 SVPWM波生成模块 (34)6.7仿真实验结果 (35)6.7.1 定子磁链轨迹比较 (35)6.7.2定子电流比较 (36)6.7.3 转速响应比较 (38)6.7.4 转矩响应比较 (39)6.8 本章小结 (40)第7章结论 (41)参考文献 (42)致谢 (43)附录1 (44)附录2 (45)第1章绪论1.1 交流调速系统的发展与现状一直以来,直流调速系统以其简单而优越的调速性能,掩盖了其具有结构复杂,换向麻烦等缺点,被广泛地应用。
按定子磁链定向控制直接转矩控制系统仿真
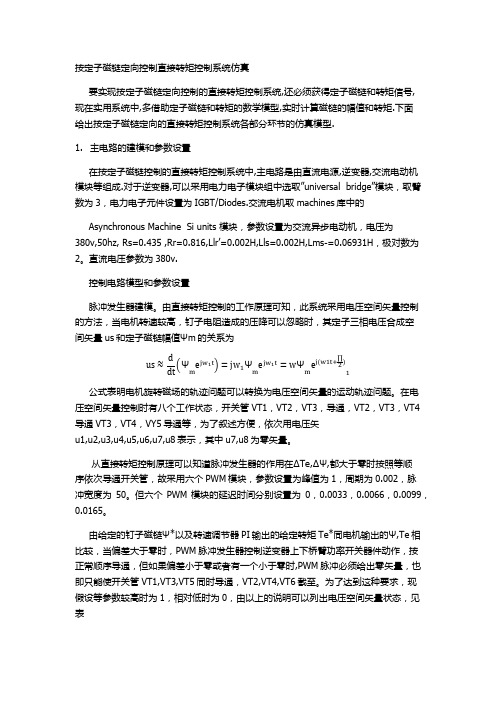
按定子磁链定向控制直接转矩控制系统仿真要实现按定子磁链定向控制的直接转矩控制系统,还必须获得定子磁链和转矩信号,现在实用系统中,多借助定子磁链和转矩的数学模型,实时计算磁链的幅值和转矩.下面给出按定子磁链定向的直接转矩控制系统各部分环节的仿真模型.1.主电路的建模和参数设置在按定子磁链控制的直接转矩控制系统中,主电路是由直流电源,逆变器,交流电动机模块等组成.对于逆变器,可以采用电力电子模块组中选取”universal bridge”模块,取臂数为3,电力电子元件设置为IGBT/Diodes.交流电机取machines库中的Asynchronous Machine Si units 模块,参数设置为交流异步电动机,电压为380v,50hz, Rs=0.435 ,Rr=0.816,Llr’=0.002H,Lls=0.002H,Lms-=0.06931H,极对数为2。
直流电压参数为380v.控制电路模型和参数设置脉冲发生器建模。
由直接转矩控制的工作原理可知,此系统采用电压空间矢量控制的方法,当电机转速较高,钉子电阻造成的压降可以忽略时,其定子三相电压合成空间矢量us和定子磁链幅值Ψm的关系为us≈ddt(Ψme jw1t)=jw1Ψme jw1t=wΨme j(w1t+∏2)1公式表明电机旋转磁场的轨迹问题可以转换为电压空间矢量的运动轨迹问题。
在电压空间矢量控制时有八个工作状态,开关管VT1,VT2,VT3,导通,VT2,VT3,VT4导通VT3,VT4,VY5导通等,为了叙述方便,依次用电压矢u1,u2,u3,u4,u5,u6,u7,u8表示,其中u7,u8为零矢量。
从直接转矩控制原理可以知道脉冲发生器的作用在ΔTe,ΔΨ,都大于零时按照等顺序依次导通开关管,故采用六个PWM模块,参数设置为峰值为1,周期为0.002,脉冲宽度为50。
但六个PWM模块的延迟时间分别设置为0,0.0033,0.0066,0.0099,0.0165。
永磁同步电机直接转矩控制研究与仿真
永磁同步电机直接转矩控制研究与仿真
永磁同步电机在很多工业领域得到广泛应用,如风力发电、石油钻机、电动汽车等。
因此,对永磁同步电机的研究与控制显得尤为重要。
本文在Matlab/Simulink集成环境下,以永磁同步电机的直接转矩控制为研究对象,对其进行了建模、仿真、分析和评价。
首先,本文对永磁同步电机的数学模型进行了建立。
假设永磁同步电机的转子磁通是
恒定的,忽略电机的电阻、漏电感等因素,将电机建模为一个独立的转矩源和一个无损耗
的电感,以此建立了永磁同步电机的数学模型。
在此基础上,本文利用Simulink中的电
机仿真模块,建立了永磁同步电机的仿真模型。
其次,本文利用直接转矩控制算法对永磁同步电机进行了控制。
直接转矩控制是一种
非线性控制方法,可直接获得电磁转矩作为输出,具有快速响应、精度高等优点。
本文以
电流环和转矩环为核心,建立了直接转矩控制的Simulink模型,并进行了仿真实验。
最终,本文分析了仿真结果,得出了控制效果良好的结论。
最后,本文对直接转矩控制的优缺点以及未来研究方向进行了讨论。
直接转矩控制具
有响应速度快、控制精度高等优点,但同时也存在控制器设计复杂、容易产生共振等缺点。
未来研究方向包括改进控制算法、优化控制器结构等。
综上所述,本文对永磁同步电机的直接转矩控制进行了研究与仿真,并得出了恰当的
控制策略。
通过本文的研究,对永磁同步电机的控制方法及其优缺点有了更深入的理解。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
考
文
献
陈坚 . 交流电机数学模型及调速系统 . 北 京 : 国防工业出版 社 ,
作
者
简
介
杜育宽 : 海南大学信息学院 。邮编 : 570228 魏应彬 : 海南大学信息学院 。邮编 : 570228 孙盛杰 : 海南大学信息学院 。邮编 ; 570228 ( 收稿日期 : 2001 ∋ 01∋ 15) 责任编辑 : 李光辉
# 11 #
信
息
技
术
2001 年第 2 期
三相桥臂上开关元件的通与断。 1. 2 系统控制规律 磁链控制规律: 对于电压型 PWM 逆变器应电机。通过变换 和整理, 可得定子磁链和转矩到二相 ∀、 # 的变换式 为:
∀ #
电机定子磁链矢量可表示为: s∃ = %Vs∃ dt = Vi∃ ( Sa, Sb, Sc) & t+
图2 空间电压矢量
调的交流电 , 供给交流负载。本系统采用单片微机, s 恒定的情况下 , 只需简单的硬件资源 , 即可实现异步电机的交流调 速。图 3 为系统控制电路硬件结构。 系统包括一个主程序, 五个子程序( 积分计算磁 链子程序、 计算转矩子程序、 计算合成磁链子程序、 A D 子程序、 查表子程序等) , 两个中断子程序 ( 定时 器 0 中断子程序、 INT1 中断子程序) 。 2. 2 实现结果 本系 统 对 额 定 功 率 为: 5. 5KW, 额 定 转 速: 171rad s, 极数 P: 4 星型接法的三相感应电动机进 行了实验。当 Vd 很低 ( 约在 20V 左右 ) 时, 电机开 始步进式地缓慢而平滑地连续运转 , 随着 Vd 的增 大 , 电机 转速亦随之增大, 反之 亦然。通过反复实 验 , 证明该系统具有高动态性能特性。 此外 , 在同一电 机下, 本文对 该系统进 行了仿 真 , 研究这种控制方法的有效性以及此系统动、 静态 性能。图 4 给出电机合成磁链 s、 电机转矩 M 以及 电机转速 的仿真图形。
2001 年第 2 期
信
息
技
术
# 10#
直接转矩控制系统与仿真
杜育宽 魏应彬 孙盛杰
摘 要 利用单片微机实现异步电动机直接转矩控制系统。 分析该系统的基本原理、 控制规律、 数学 模型、 系统的软 、 硬件实现以及对该系统的仿真和实验 。从仿真和实验结果分析 , 证明这种控制系统的有效 性。 关键词 直接转矩控制 异步电机 仿真 择逆变器的最佳开关模式来直接控制磁链矢量 的控制。 s
3
结论
一个好的用户接口应该具有直观性、 一致性、 可
移植性、 可靠性、 易使用性、 提供反馈以及提供用户 指导和帮助信息等 , 真正做到人机友好。在 Motif 下 开发自己的产品, 将会有更高的开发效率 , 更好的移 植性, 更精彩的界面, 从而有更强的竞争力。 作 者 简 介
吕冬梅 : 哈尔滨市公安局通讯计算机应用监察处 。 邮编 : 150010 王惠娟 : 哈尔滨市公安局通讯计算机应用监察处 。 邮编 : 150010 ( 收稿日期 : 2000 ∋ 12∋ 20) 责任编辑 : 杨立民
( 下转第 24 页 )
1. 2. 2
转矩控制规律 : 在磁链
控制异步电动机转矩实质上就 是控制转差角 速度 & , 当逆变器输出非零电压矢量时 , s 以最大角速 度 s 旋转 , 转差角速度 & = 电压矢量时, 磁链 = s( 为电机转子 角速度) 为正 , 电机转矩 M 增大。当逆变器 输出零 s 停转 , s= 0, 转差角速度 & 为负值 , 故电机转矩 M 减小。所以通过控制
M= np ( i#
- i∀
#
)
2 D. T. S 系统实现
图 3
系统控制电路硬件结构图
系统设计 通用的 PWM 型逆变器实际上是一种交 - - 直
- - 交电压型变频器, 它由整流器、 中间环节和逆变 器组成 , 通过整流器将工频交流电整流成直流电 , 经 过中间环节 , 由逆变器将直流电逆变成频率、 幅值可
3
结论
从实验和仿真结果来看 , 整个系统结构简单 , 价 格低廉 , 运行可靠 , 控制性能良好, 是一种非常有实 用价值的控制系统。 参
(1) (2) (3) (4) 1989 马忠梅 . 单片机的 C 语言应用程序设 计 . 北 京 : 北京航空航 天 大学出版社 , 1999 吴受章 . 应用最优控制 . 西安 : 西安交大出版社 , 1992 韩惠君 . 系统仿真 . 北京 : 国防工业出版社 , 1993
*
逆变器输出的电压矢量, 就可控制电机转矩的大小。 即把计算所得的电机实际转 矩 M 与给定值 M 比 较, 当误差 M- M 大于允许误差 ! M 时让逆变器输
*
出零电压矢量, 使电机 输出转矩减小 , 回到误 差限 内; 反之让其输出非零电压矢量, 使转矩增大; 当误 差在允许范围内时, 逆变器维持原状态不变。 1. 3 D. T . S 系统异步电机数学模型 对于 A、 B、 C 三相坐标系中异步电机基本方程 式的求解是十分困难的, 故常采用各种线性变换( 坐 标变换) 对其进行改造, 使异步电机动态特性的分析 和求解变得比较容易进行。适当选取坐标变换 , 将 A、 B、 C 坐标系变换为 ∀ 、 # 坐标系 , 相当于把三相感
0
引言
尽管矢量控制理论能实现交流电动机高性能速
的运动轨迹和速度, 实现对异步电动机转矩和速度
度控制 , 但所得到的控制器对于较大范围的应用来 说太复杂, 而且对电机参数的依赖性过大。控制方 法的改进 ( 及替代矢量变换) 应保持直接转矩控制的 特点。直接转矩控制系统是根据对定子电压、 电流 的检测, 实时计算出电机的磁链和转矩 , 将其与给定 值比较 , 通过磁链矢量和转矩的 Bang_Bang 控 制选
图 4 电机合成磁链 s、 电机转矩 M 以及电机转速
的仿真图形
1 直接转矩控制 ( D. T. S) 系统基本原 理、 控制规律及数学模型
1. 1 D. T. S 系统基本原理 系统原理框图如图 1 所示。
图 1 D. T. S 系统基本原理框图
系统由两个控制环组成, 内环为磁链环, 外环为 转矩环。系统中开关状态逻辑切换单元 ( ESS) 的输
出为三个具有 ! 1∀ 和! 0∀ 两个状态并互差 2 3 电角 度的开关状态量 Sa、 Sb 、 Sc, 用以控制逆变器 A、 B、 C
= % ( u∀ - i∀Rs ) dt = % ( u# - i#Rs ) dt
∀
三个开关量 Sa 、 Sb 、 Sc 的通和断可以组成 8 种 工作状态 , V0 和 V7 表示两个零矢量 , 如图 2 所示。 当逆变器处于某一工作状态时 , s∃ 沿 该状态 对应的电压矢量 Vi∃ ( Sa, Sb, Sc) 方向运动 , s∃ 的速 度比例于电压矢量的幅值。这意味着当 Vi∃ ( Sa, Sb, Sc) 为非零电压矢量时 , s∃ 以恒定速度旋转 ; 而当 Vi∃ ( Sa, Sb, Sc) 为零电压矢量时 , s∃ 停止不动。这 样, 利用磁链的 Bang_Bang 控制切换逆变器开 关状 态( 选择电压矢量 ) 可使 s∃ 轨迹按一定规律运动。 由此, 在两个空间非零电压矢量间插入一个或多个 空间零电压矢量就可调节 s∃ 的旋转速度。 2. 1
( 上接第 11 页 )
编译、 运行、 动态跟踪诊断、 打印都集成到一起。只 要点一下菜单、 或按一个∀热键∀ , 就可实现其功能。 Mpro 还提供简明、 及时、 多窗口的 信息来表示 或引导使用者的操作过程。良好、 明快、 集成的图形 界面大大提高了用户开发自己软件产品的效率。在 UNIX 系统下没有自己的集成环境语言程序的开发, 如果不利用 Motif 库函数, 而直接利用 X 窗口库函数 开发同样功能的程序 , 其复杂度和工作量将不知道 大多少倍 , 而且 Mpro 可在任何一种支持 Mot if 图形 用户界面标准的 UNIX 工作站上迅速移植成功。
2001 年第 2 期
信
息
技
术
# 24#
境 MPro
Mpro 将交互式工程项目 ( project ) 设计, 文 件管 理, 打印, 高效率的文本编辑 , 程序编译, 运行, 动态 跟踪诊断集成在一起, 提供给用户一个高效的开发 环境。其界面和操作方式与目前微机上常用的集成 程序开发环境( 如 BorlandC 十十) 类似。它的 Project 设计提供多窗口逐步引导用户为自己的大工程建立 良好的框架结构 , 建立各子模块间的连接关系 , 建立 各子模块与其包含文件的编译关系 , 连接各种图形 库、 窗口库、 数据库等, 选择不同的编译设置提高编 译效率。在 UNIX 系统下 开发 大工程 进行 整体 设 计, 建立与操作系统、 窗口、 编译器的联系这对用户 来说 最 难掌 握 , 对 开 发效 率 影响 最大 的 工作 , 在 Project 良好界面 的逐步引导下 就会比较容易 地完 成。 Mpro 的文本编辑是在 Mot if 的 Text( 文本 ) 类部 件的基础上开发出来的, 完全克服了 VI、 E 等老式文 本编辑器编程效率低下的缺点。它的功能和微机上 优秀文本编辑软件很相似。利用! 热键∀ 的编辑功能 更加简捷 . 多窗口的便捷复制、 删除、 粘贴、 查询、 替 换、 跳行使用户感到得心应手。它的大编辑存储区 能够装入几万行的大型程序。此外 , Mpro 还将程序