现代控制理论-第7章
自动控制原理第7章_非线性控制系统
7.2 相平面法
1. 基本概念 2. 相平面图的绘制 3. 线性系统的相轨迹 4. 非线性系统的相平面分析
7.2 相平面法
1. 基本概念 相平面法是一种求解二阶常微分方程的图解方法。 1) 相平面图 f ( x, x ) 0 x 二阶系统的数学描述 ,得下列一阶微分方程组 设x1=x,x2= x
非线性系统一般理解为非线性微分方程所描述的
系统。 线性系统的本质特征是叠加原理,因此非线性系 统也可以理解为不满足叠加原理的系统。
7.1 概述
2. 典型的非线性特性
1) 饱和特性
2) 死区特性
3) 间隙特性(滞环特性)
4) 变放大系数特性
5) 继电器特性
7.1 概述
1) 饱和特性
x(t) k 0 a e(t)
数学表达式
ke(t ) x(t ) ka signe(t )
1 signe(t ) 1 不定
e(t ) a e(t ) a
-a
符号函数(开关函数)
e(t ) 0 e(t ) 0 e(t ) 0
图 7.2 饱和特性
a – 线性域宽度 k – 线性域斜率
(d)半稳定极限环
(a) 可通过实验观察到。设计时应尽量减少极限环 的大小,以满足系统的稳态误差要求。
(b) 不能通过实验观察到。设计时应尽量增大极限 环的大小,以扩大系统的稳定域。
(c)、(d)不能通过实验观察到。(c)不稳定。(d)稳 定,但过渡过程时间将由于极限环的存在而增加。
7.2 相平面法
单输入-单输出的线性定常系 统
现代控制理论(20世纪50 年代后)
可以是比较复杂的系统
控制工程技术基础 第7章现代控制理论简介
7.2控制系统的状态空间表达式
7.2.1状态、状态变量
状态:系统运动信息的集合。 状态变量:可以完全确定系统的运动状态且数目最小的一组变量。所 谓完全确定,是指只要给定t0时刻的这组变量的值和系统在t ≥t0时系 统的输入函数,则系统在t > t0的任意时刻的状态就可完全确定。所谓 数目最小是指:如果变量数目大于该值,则必有不独立的变量;小于 该值,又不足以描述系统的运动状态。 状态向量:n个状态变量x1 (t),x2 (t),…, xn (t)所构成的向量X(t)就 是系统的状态向量,记作X(t)=[x1 (t),x2 (t),…, xn (t)]T
上一页
ห้องสมุดไป่ตู้下一页
返回
7.4最优控制
以上可见,邦特略京极小值原理实际上是把一个求性能指标J的 最小值问题,转化成一个求哈密顿函数H的最小值问题。 当系统的状态方程为
第7章现代控制理论简介
7.1概述 7.2控制系统的状态空间表达式 7.3状态反馈与输出反馈 7.4最优控制
7.1概述
现代控制理论的基本内容包括五个方面,简单说明如下。 1.最优控制 在图7-1所示系统中,有一组输入函数u (t)作用在受控系统上,其 相应状态变量是x (t),通过量测系统可得到这些状态的某种组合y (t), 此即系统输出。根据实际需要,可为受控系统指定一些目标(性能指 标)。 2.最优估计 图7-1所示系统中,输出量y (t)是通过量测系统由状态转换过来 的。但实际的量测系统常受到噪声v (t)的干扰,如图7-2所示。如果将 整个系统看成是一个信息传递系统,用输入噪声w( t)表示这个系统的 模型误差,也称动态噪声,则从y (t)中,克服w( t)和v (t)的影响估计 出状态x (t)来,称为最优状态估计问题。
现代控制理论智慧树知到课后章节答案2023年下长安大学
现代控制理论智慧树知到课后章节答案2023年下长安大学长安大学绪论单元测试1.下列语句中,不正确的是()。
A:现代控制理论是建立在状态空间法基础上的一种控制理论,是自动控制理论的一个主要组成部分,可以解决经典控制理论不能解决的所有控制难题。
B:现代控制理论比经典控制理论所能处理的控制问题要广泛得多,包括线性系统和非线性系统,定常系统和时变系统,单变量系统和多变量系统;C:20世纪50年代中期,空间技术的迅速发展迫切要求建立新的控制原理,以解决诸如把宇宙火箭和人造卫星用最少燃料或最短时间准确地发射到预定轨道一类的控制问题;D:在现代控制理论中,对控制系统的分析和设计主要是通过对系统的状态变量的描述来进行的,基本的方法是时间域方法;答案:现代控制理论是建立在状态空间法基础上的一种控制理论,是自动控制理论的一个主要组成部分,可以解决经典控制理论不能解决的所有控制难题。
2.通过测量输出量,产生一个与输出信号存在函数关系的信号的元件称为()。
A:给定元件B:放大元件C:反馈元件D:比较元件答案:比较元件3.闭环控制系统的控制方式为()。
A:按扰动信号控制B:按输入信号控制C:按偏差信号控制D:按反馈信号控制答案:按偏差信号控制4.经典控制理论描述系统的数学模型是由高阶线性常微分方程演变来的传递函数,适合分析和设计下列哪种系统()A:非线性系统B:单输入单输出系统C:线性定常系统D:多输入多输出系统答案:单输入单输出系统;线性定常系统5.现代控制理论是建立在状态空间法基础上的一种控制理论,是自动控制理论的一个主要组成部分,比经典控制理论所能处理的控制问题要广泛得多,适合分析和设计下列哪种系统()A:非线性系统B:线性时变系统C:多输入多输出系统D:线性定常系统答案:非线性系统;线性时变系统;多输入多输出系统;线性定常系统第一章测试1.系统状态空间实现中选取状态变量不是唯一的,其状态变量的个数是唯一的()A:对 B:错答案:对2.多输入-多输出系统的U-Y 间的传递函数为()A:错 B:对答案:对3.由一个状态空间模型可以确定多个传递函数。
现代控制理论课后题及答案
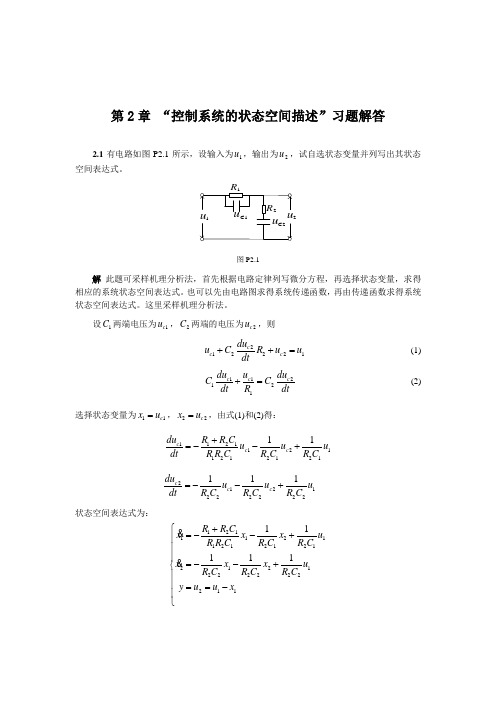
第2章 “控制系统的状态空间描述”习题解答2.1有电路如图P2.1所示,设输入为1u ,输出为2u ,试自选状态变量并列写出其状态空间表达式。
图P2.1解 此题可采样机理分析法,首先根据电路定律列写微分方程,再选择状态变量,求得相应的系统状态空间表达式。
也可以先由电路图求得系统传递函数,再由传递函数求得系统状态空间表达式。
这里采样机理分析法。
设1C 两端电压为1c u ,2C 两端的电压为2c u ,则212221c c c du u C R u u dt++= (1) 112121c c c du u duC C dt R dt+= (2) 选择状态变量为11c x u =,22c x u =,由式(1)和(2)得:1121121121212111c c c du R R C u u u dt R R C R C R C +=--+ 2121222222111c c c du u u u dt R C R C R C =--+ 状态空间表达式为:12111211212121212122222221111111R R C x x x u R R C R C R C x x x u R C R C R C y u u x +⎧=--+⎪⎪⎪=--+⎨⎪⎪==-⎪⎩即: 12121121211112222222211111R R C R C R R C R C x x u x x R C R C R C +⎡⎤⎡⎤-⎢⎥⎢⎥⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦--⎢⎥⎢⎥⎣⎦⎣⎦[]11210x y u x ⎡⎤=-+⎢⎥⎣⎦2.2 建立图P22所示系统的状态空间表达式。
1图P2.2解 这是一个物理系统,采用机理分析法求状态空间表达式会更为方便。
令()f t 为输入量,即u f =,1M ,2M 的位移量1y ,2y 为输出量, 选择状态变量1x =1y ,2x = 2y ,3x =1dy dt,24dyx dt =。
现代控制理论课后习题答案

现代控制理论课后习题答案第⼀章习题1.2求下列多项式矩阵()s D 和()s N 的两个不同的gcrd:()2223(),()1232s s s s s s s s s ??++== ? ?+-??D N 解:()()22232321s s s s s s s++ =++ ? ?D S N S ; ()3r 2,1,2E -:223381s s s s s s ??++ ?-- ? ???;()3r 2,3,3E :223051s s s s s ??++ ?- ? ???;()3r 1,3,2E s --:01051s s ?? ?- ? ;()3r 2,1,5E s -:01001s ?? ?;()3r 3,1,1E -:01000s ?? ? ? ???;()1r 2,3E :01000s ?? ? ? ???;()1r 1,2E :00100s ?? ?;所以⼀个gcrd 为001s ??;取任⼀单模矩阵预制相乘即可得另⼀个gcrd 。
1.9 求转移矩阵t A e (1)已知1141??=A ,根据拉⽒反变换求解转移矩阵tA e 。
(2) 已知412102113-?? ?= ? ?-??A ,根据C-H 有限项展开法求解转移矩阵t A e 。
解:(1)11()41s s s --??-= ?--??I A1110.50.50.250.2511(3)(1)(3)(1)13131()4141110.50.5(3)(1)(3)(1)(3)(1)3131s s s s s s s s s s s s s s s s s s s s s s s --+---+-+??-+-+ ? ?-=== ? ?---+ ?-+ ? ?-+-+-+-+?I A 3311330.5e 0.5e 0.25e 0.25e e ()e e 0.5e 0.5e t t t t t t tt t s ------??+-??=-= ??? ?-+?A L I A (2)由2412()12(1)(3)0113λλλλλλ--?? ?=--=--= ? ?--??A I -,得1,233,1λλ== 对1,23λ=,可以计算1,2()2rank λ=A I -,所以该特征值的⼏何重数为1。
现代控制理论1-8三习题库
13.若矩阵A的n个特征值互异,则可通过线性变换将其化为 角阵,雅可比阵)。
14.状态变量是确定系统状态的(最小,最大)一组变量。
15.以所选择的一组状态变量为坐标轴而构成的正交(线性,非线性)
空间,称之为_,(传递函数,状态空间)。
1.试求图1-27系统的模拟结构图,并建立其状态空间表达式。
自动控制领域的科学研究方法,已经由最早的经典控制中以输入输出模型为主,发展为
现今的现代控制中以状态空间模型为主。因而,“现代控制理论”是从事自动化专业必备的
知识。“现代控制理论”的教学目标是使学生牢固树立线性系统中状态空间的概念、进一步 理解系统稳定性这一控制学科最为重要的概念,掌握能控与能观、状态反馈与状态估计等核
重点内容:逆矩阵、线性无关与线性相关定义、非齐次方程求解、哈密顿定理、定号性 理论等。
系统的数学描述可分为哪两种类型
自然界存在两类系统:静态系统和动态系统,有何区别 现代控制理论研究的主要内容是什么
现代控制理论研究对象
现代控制理论所使用的数学工具有哪些 现代控制理论问题的解决方法是什么
第二章(单元):
心方法。通过本课程学习,使学生做到各章概念融会贯通,解题方法灵活运用,分析解决实 际问题。从宏观角度把握课程的体系结构,建立起现代控制理论的基本框架。主要培养学生
以下三个方面的能力:
1、分析建模能力
根据系统的工作原理或实验数据,建立合理的数学模型。
2、认知和理解能力理解与Leabharlann 握能控性、能观测性与系统设计的关系,
合。这些信息对于确定系统(过去,未来)的行为是充分且必要
的。
10.如果系统状态空间表达式中矩阵A, B, C, D中所有元素均为实常数时,
《现代控制理论》课后习题全部答案(最完整打印版)
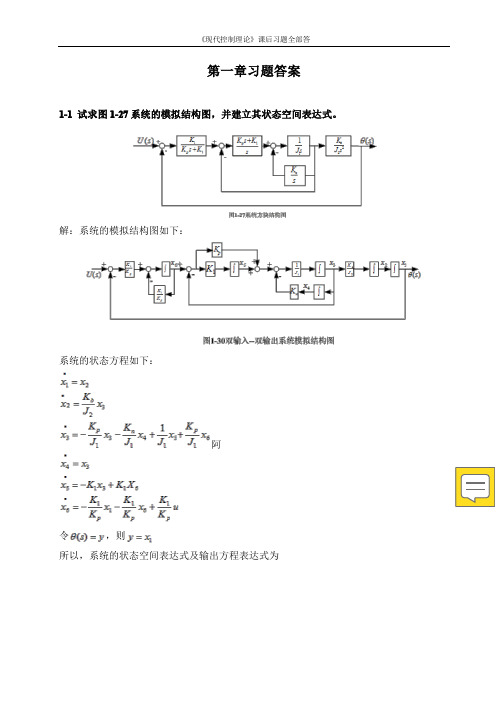
第一章习题答案1-1试求图1-27系统的模拟结构图,并建立其状态空间表达式。
解:系统的模拟结构图如下:系统的状态方程如下:阿令,则所以,系统的状态空间表达式及输出方程表达式为状态变量的状态方程,和以电阻上的电压作为输出量的输出方程。
解:由图,令,输出量有电路原理可知:既得写成矢量矩阵形式为:1-4两输入,,两输出,的系统,其模拟结构图如图1-30所示,试求其状态空间表达式和传递函数阵。
解:系统的状态空间表达式如下所示:1-5系统的动态特性由下列微分方程描述列写其相应的状态空间表达式,并画出相应的模拟结构图。
解:令,则有相应的模拟结构图如下:1-6(2)已知系统传递函数,试求出系统的约旦标准型的实现,并画出相应的模拟结构图解:1-7给定下列状态空间表达式(1)画出其模拟结构图(2)求系统的传递函数解:(2)1-8求下列矩阵的特征矢量(3)解:A的特征方程解之得:当时,解得:令得(或令,得)当时,解得:令得(或令,得)当时,解得:令得1-9将下列状态空间表达式化成约旦标准型(并联分解)(2)解:A的特征方程当时,解之得令得当时,解之得令得当时,解之得令得约旦标准型1-10已知两系统的传递函数分别为W1(s)和W2(s)试求两子系统串联联结和并联连接时,系统的传递函数阵,并讨论所得结果解:(1)串联联结(2)并联联结1-11(第3版教材)已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为求系统的闭环传递函数解:1-11(第2版教材)已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为求系统的闭环传递函数解:1-12已知差分方程为试将其用离散状态空间表达式表示,并使驱动函数u的系数b(即控制列阵)为(1)解法1:解法2:求T,使得得所以所以,状态空间表达式为第二章习题答案2-4用三种方法计算以下矩阵指数函数。
(2)A=解:第一种方法:令则,即。
求解得到,当时,特征矢量由,得即,可令当时,特征矢量由,得即,可令则,第二种方法,即拉氏反变换法:第三种方法,即凯莱—哈密顿定理由第一种方法可知,2-5下列矩阵是否满足状态转移矩阵的条件,如果满足,试求与之对应的A阵。
第7章 非线性系统的分析

某一初始条件出发在相平面上按照式(7-13)或式(7-14)绘出的
曲线称为相平面轨迹,简称相轨迹。不同初始条件下构成的
相轨迹,称为相轨迹簇。由相轨迹簇构成的图称为相平面图。
利用相平面图分析系统性能的方法,称为相平面分析法。
图7-6为某个非线性系统的相平面图。图中,相轨迹上的
箭头表示相变量随着时间的增加沿相轨迹运动的方向。
第7章 非线性系统的分析 7.2 相平面分析法
7.2.1 相平面的基本概念 设二阶非线性系统的微分方程为
第7章 非线性系统的分析
第7章 非线性系统的分析
1.相平面和相轨迹
前面已经设定
我们称以x1(或x)为横坐
标、以x2(或 )为纵坐标构成的平面为相平面(注意,纵坐标x2
是横坐标x1的一阶导数),如图7-6所示。x1、x2为相变量。由
7.2.2 线性系统的相轨迹 在学习非线性系统的相平面分析法之前,我们先对非常
熟悉的线性系统做相平面分析。设二阶线性系统的微分方程 为
第7章 非线性系统的分析
也就是说,无论系统特征参数ωn和ξ是何值,系统的奇点是 不变的。此外,式(7-21)的特征方程为
系统的特征根为
对于不同的阻尼比ξ,二阶系统特征根的形式是不同的,而 线性系统的时域响应是由特征根决定的。下面介绍系统特征 根与系统的奇点(0,0)以及相轨迹的关系。
行线性化。我们只研究系统平衡点附近的特性时,就可以采 用平衡点附近的线性化方法,将非线性系统在平衡点附近小 范围线性化。当然,也可以将非线性系统分为几个区域,对每 个区域进行分段线性化。
第7章 非线性系统的分析
2.相平面分析法 相平面分析法简称相平面法,是非线性系统的图解分析 法。其基本思路是:建立一个相平面,在相平面上根据非线性 系统的结构和特性,绘制非线性系统的相轨迹。相轨迹就是 非线性系统中的变量在不同初始条件下的运动轨迹,根据相 轨迹就可以对非线性系统进行分析。该方法只适用于一阶和 二阶非线性微分方程。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第六次课小结一、 Lyapunov 意义下的稳定性问题基本概念● 平衡状态的概念● Lyapunov 意义下的稳定性定义(稳定,一致稳定,渐进稳定,一致渐进稳定,大范围渐进稳定等)● 纯量函数的正定性,负定性,正半定性,负半定性,不定性 ● 二次型,复二次型(Hermite 型)二、 Lyapunov 稳定性理论● 第一方法 ● 第二方法三、 线性定常系统的Lyapunov 稳定性分析● 应用Lyapunov 方程Q PA P AH-=+来进行判别稳定性四、 线性定常系统的稳定自由运动的衰减率性能估计● 衰减系数,一旦定出min η,则可定出)(x V 随时间t 衰减上界。
● 计算min η的关系式五、 离散时间系统的状态运动稳定性及其判据● 离散系统的大范围淅近稳定判据,Lyapunov 稳定判据在离散系统中的应用六、 线性多变量系统的综合与设计的基本问题●问题的提法●性能指标的类型●研究的主要内容七、极点配置问题●问题的提出●可配置条件●极点配置算法5.2.5 爱克曼公式(Ackermann ’s Formula) 考虑由式(5.1)给出的系统,重写为Bu Ax x +=假设该被控系统是状态完全能控的,又设期望闭环极点为n s s s μμμ===,,,21 。
利用线性状态反馈控制律Kx u -=将系统状态方程改写为x BK A x )(-=(5.14)定义BK A A -=~则所期望的特征方程为)())((~11121=++++=---=-=+-**--*n n n nn a s a sa s s s s A sI BK A sI μμμ由于凯莱-哈密尔顿定理指出A ~应满足其自身的特征方程,所以0~~~)~(**11*1*=++++=--I a A a A a A A n n n n φ (5.15)我们用式(5.15)来推导爱克曼公式。
为简化推导,考虑n = 3的情况。
需要指出的是,对任意正整数,下面的推导可方便地加以推广。
考虑下列恒等式22333222~~)(~~)(~~ABK A ABK BK A A BK A A A BK ABK A BK A A BKA A I I ---=-=--=-=-== 将上述方程分别乘以)1(,,,*0*0*1*2*3=a a a a a ,并相加,则可得32*1*2*3~~~AA a A a I a +++-+--+-+=32*1*2*3)~()(A A BK ABK A a BK A a I a22~~ABK A ABK BK A --------+++=BK A A BK a ABK a BK a A A a A a I a 2*1*1*232*1*2*3~2~~A BK A ABK -- (5.16)参照式(5.15)可得0)~(~~~*32*1*2*3==+++A A A a A a I a φ也可得到0)(*32*1*2*3≠=+++A A A a A a I a φ将上述两式代入式(5.16),可得BKA A ABK ABK a A BK A BK a BK a A A 2*12*1*2**~~~)()~(------=φφ由于0)~(*=A φ,故BKA A K K a AB A K A K a K a B A 2*12*1*2*)~()~~()(+++++=φ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+++=K A K K a A K A K a K a B A AB B ~~~][*12*1*22 (5.17)由于系统是状态完全能控的,所以能控性矩阵][2B A AB B Q =的逆存在。
在式(5.17)的两端均左乘能控性矩阵Q 的逆,可得⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+++=-K A K K a A K A K a K a A B A AB B ~~~)(][*12*1*2*12φ上式两端左乘[0 0 1],可得KK A K K a A K A K a K a A B A AB B =⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+++=-~~~]100[)(]][100[*12*1*2*12φ重写为)(][]100[*12A B A AB B K φ-=从而给出了所需的状态反馈增益矩阵K 。
对任一正整数n ,有)(]][1000[*11A B AAB B K n φ--= (5.18)式(5.18)称为用于确定状态反馈增益矩阵K 的爱克曼方程。
------------------------------------------------- [例5.1] 考虑如下线性定常系统Bu Ax x +=式中⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=100,651100010B A利用状态反馈控制Kx u -=,希望该系统的闭环极点为s = -2±j 4和s = -10。
试确定状态反馈增益矩阵K 。
首先需检验该系统的能控性矩阵。
由于能控性矩阵为:⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--==316161010][2B A AB B Q所以得出det Q = -1,因此,rank Q = 3。
因而该系统是状态完全能控的,可任意配置极点。
下面,我们来求解这个问题,并用本章介绍的3种方法中的每一种求解。
方法1:第一种方法是利用式(5.13)。
该系统的特征方程为:156651101||3221323=+++=+++=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+--=-a s a s a s s s s s s sA sI因此1,5,6321===a a a期望的特征方程为2006014)10)(42)(42(*3*22*1323=+++=+++=+++-+a s a s a s s s s s j s j s因此200,60,14*3*2*1===a a a参照式(5.13),可得]855199[]6145601200[=---= K方法2:设期望的状态反馈增益矩阵为][321k k k K =并使||BK A sI +-和期望的特征多项式相等,可得⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=+-651100010000000||s s s BK A sI 321[100k k k ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+ 20060141)5()6(65110012312233321+++=++++++=++++--=s s s k s k s k s k s k k ss因此2001,605,146123=+=+=+k k k从中可得8,55,199321===k k k或]855199[=K方法3:第三种方法是利用爱克曼公式。
参见式(5.18),可得)(]][100[*12A B A AB B K φ-=由于I A A A A 2006014)(23*+++=φ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=11743771598855199100010001200651100010606511000101465110001023且⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=316161010][2B A AB B可得]855199[11743771598855199001016165]100[117437715988551993161610100]100[1=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=-K显然,这3种方法所得到的反馈增益矩阵K 是相同的。
使用状态反馈方法,正如所期望的那样,可将闭环极点配置在s = -2±j 4和s = -10处。
------------------------------------------------------------------------------应当注意,如果系统的阶次n 等于或大于4,则推荐使用方法1和3,因为所有的矩阵计算都可由计算机实现。
如果使用方法2,由于计算机不能处理含有未知参数n k k k ,,,21 的特征方程,因此必须进行手工计算。
5.2.6 注释对于一个给定的系统,矩阵K 不是唯一的,而是依赖于选择期望闭环极点的位置(这决定了响应速度与阻尼),这一点很重要。
注意,所期望的闭环极点或所期望状态方程的选择是在误差向量的快速性和干扰、测量噪声的灵敏性之间的一种折衷。
也就是说,如果加快误差响应速度,则干扰和测量噪声的影响通常也随之增大。
如果系统是2阶的,那么系统的动态特性(响应特性)正好与系统期望的闭环极点和零点的位置联系起来。
对于更高阶的系统,期望的闭环极点位置不能和系统的动态特性(响应特性)联系起来。
因此,在决定给定系统的状态反馈增益矩阵K 时,最好通过计算机仿真来检验系统在几种不同矩阵(基于几种不同的期望特征方程)下的响应特性,并且选出使系统总体性能最好的矩阵K 。
5.3 利用MATLAB 求解极点配置问题用MATLAB 易于求解极点配置问题。
现在我们来求解在例5.1中讨论的同样问题。
系统方程为Bu Ax x +=式中⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=100651100010B A , 采用状态反馈控制Kx u -=,希望系统的闭环极点为s =μi(i=1,2,3),其中10,42,42321-=--=+-=μμμj j现求所需的状态反馈增益矩阵K 。
如果在设计状态反馈控制矩阵K 时采用变换矩阵P ,则必须求特征方程|s I-A |=0的系数1a 、2a 、和3a 。
这可通过给计算机输入语句P = poly(A )来实现。
在计算机屏幕上将显示如下一组系数:则)4(3),3(2),2(1321P a a P a a P a a ======。
为了得到变换矩阵P ,首先将矩阵Q 和W 输入计算机,其中][2B A AB B Q =⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=001011112a a a W 然后可以很容易地采用MATLAB 完成Q 和W 相乘。
其次,再求期望的特征方程。
可定义矩阵J ,使得⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---+-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1000042004200000321j j J μμμ从而可利用如下poly(J )命令来完成,即因此,有)4(3),3(2),2(1*3*2*1Q aa a Q aa a Q aa a ======即对于*i a ,可采用aai 。
故状态反馈增益矩阵K 可由下式确定:1112233][-***---=P a a a a a a K或aaaaaaaaa=--K-3[P(inv())3*2]211采用变换矩阵P求解该例题的MATLAB程序如MATLAB Program 5.1所示。
Q=[B A*B A^2*B];%*****Check the rank of matrix Q*****rank(Q)ans=3%*****Since the rank of Q is 3, arbitrary pole placement is% possible *****%*****Obtain the coefficients of the characteristic polynomial%|sI-A|. This can be done by entering statement poly(A)*****JA=poly(A)JA=1.0000 6.0000 5.0000 1.0000a1=JA(2);a2=JA(3);a3=JA(4);%*****Define matrices W and P as follows*****W=[a2 a1 1;a1 1 0;1 0 0];P=Q*W;%*****Obtain the desired chracteristic polynomial by defining%the following matrix J and entering statement poly(J)*****J=[-2+j*4 0 0;0 -2-j*4 0;0 0 -10];JJ=poly(J)JJ=1 14 60 200aa1=JJ(2);aa2=JJ(3);aa3=JJ(4);%*****State feedback gain matrix K can be given by *****K=[aa3-a3 aa2-a2 aa1-a1]*(inv(P))K=199 55 8%*****Hence, k1,k2,and k3 are given by *****k1=K(1),k2=K(2),k3=K(3)如果采用爱克曼公式来确定状态反馈增益矩阵K ,必须首先计算矩阵特征方程φ(A )。